太陽翼展開試驗裝置導(dǎo)軌摩擦力自動測量系統(tǒng)設(shè)計
2022-01-06 01:12:14許紅亮張永杰
上海航天 2021年6期
許紅亮,王 宏,張永杰,胡 斌,徐 慶
(上海宇航系統(tǒng)工程研究所,上海 201109)
0 引言
太陽翼是衛(wèi)星能源系統(tǒng)的重要組成部分,太陽翼的成功展開與否是關(guān)系到衛(wèi)星發(fā)射成敗的關(guān)鍵。太陽翼地面裝配生產(chǎn)需搭建展開試驗裝置,模擬太空零重力環(huán)境,驗證太陽翼的釋放、展開及鎖定功能。展開試驗裝置主要由桁架、縱向?qū)к墶M向?qū)к墶⒒嚱M件和懸掛單元等組成。其中,橫向?qū)к壨ㄟ^帶有滾輪的滑車組件可在縱向?qū)к壣匣瑒樱瑧覓靻卧ㄟ^帶有滾輪的滑車組件可在橫向?qū)к壣匣瑒印U归_試驗裝置存在一些影響展開試驗可靠性的固有因素,包括滑車組件與導(dǎo)軌之間的摩擦力、橫導(dǎo)軌及小車的質(zhì)量、導(dǎo)軌自身變形等。通過對展開試驗裝置的結(jié)構(gòu)運動仿真分析和太陽翼展開試驗結(jié)果進(jìn)行對比,得出滑車組件與導(dǎo)軌之間的摩擦力影響最大。
針對太陽翼地面零重力展開可靠性驗證,必須對展開試驗裝置導(dǎo)軌摩擦力進(jìn)行精確、量化測量。若導(dǎo)軌摩擦力測量數(shù)據(jù)不準(zhǔn)確,導(dǎo)軌實際摩擦力大于產(chǎn)品展開力矩,將有可能導(dǎo)致太陽翼展開試驗異常。當(dāng)前,國內(nèi)展開試驗裝置導(dǎo)軌摩擦力主要采用人工手持測力計測量,該測量方法存在如下問題:1)測量數(shù)據(jù)不穩(wěn)定,一致性較差;2)測量結(jié)果不精確,數(shù)據(jù)可信度不高;3)只能測量離散靜態(tài)點,無法進(jìn)行導(dǎo)軌全程摩擦力測量,測量數(shù)據(jù)離散、不連續(xù);4)手持測力計方式測量效率低等。
因此,為滿足太陽翼地面零重力展開可靠性驗證,需研制一套精度高、效率高且具有吊掛導(dǎo)軌全行程測量的太陽翼展開試驗裝置導(dǎo)軌摩擦力自動測量系統(tǒng)。
1 系統(tǒng)功能和原理
太陽翼展開試驗裝置導(dǎo)軌摩擦力自動測量系統(tǒng)的主要功能,是對展開試驗裝置的滑車組件與縱向?qū)к壷g的摩擦力進(jìn)行高精度、高效率的測量,并得到縱向?qū)к壢谐痰哪Σ亮η€。
展開試驗裝置的桁架和縱向?qū)к壯b調(diào)完成后,將模擬太陽翼的配重連接到滑車組件下方,如圖1所示。當(dāng)滑車組件沿導(dǎo)軌方向做直線運動時,在豎直方向上受到自身的重力G
和導(dǎo)軌對滑塊的支承力F
作用,在運動方向上受到外界施加的驅(qū)動力F
以及其沿運動相反方向上的滑車阻力F
作用。當(dāng)滑車組件在電機(jī)的驅(qū)動下沿導(dǎo)軌做勻速運動時,此時滑車組件受力狀態(tài)如圖2 所示。由牛頓經(jīng)典力學(xué)定律可知: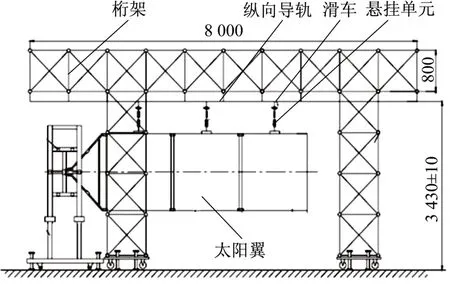
圖1 展開試驗裝置Fig.1 Schematic diagram of the deployment test facility
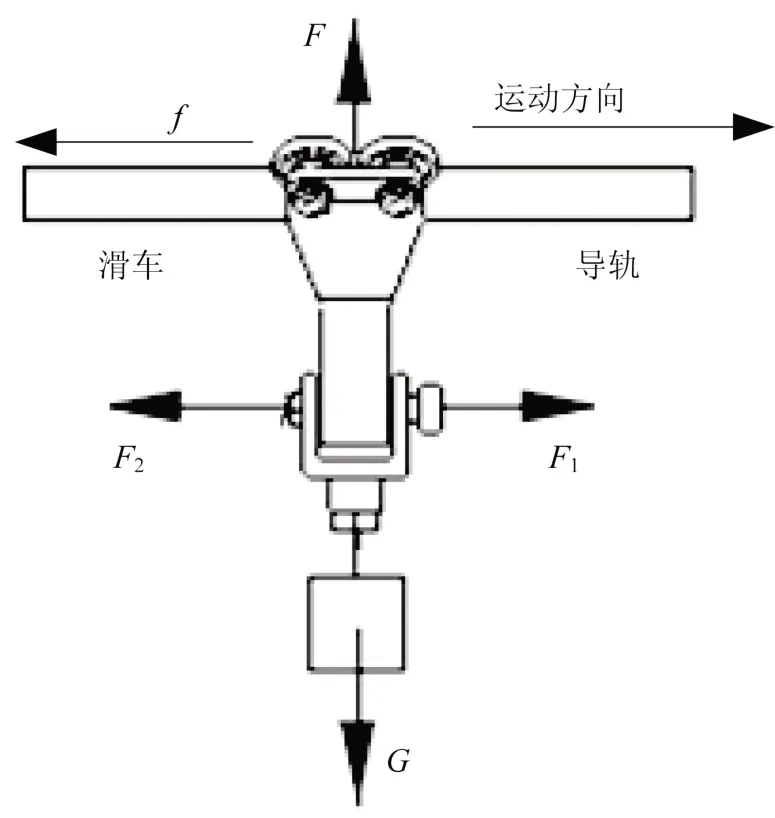
圖2 摩擦力測量原理Fig.2 Schematic diagram of friction measurement

f
為導(dǎo)軌摩擦力;F
為滑車驅(qū)動力;F
為滑車阻力。滑車組件的前端和后端分別通過轉(zhuǎn)接連接了2個高精度測力傳感器,分別測量出滑車組件兩端的拉力,同時保持滑車組件在測量過程中作勻速運動。將2個力相減,得到導(dǎo)軌的摩擦力,通過計算機(jī)數(shù)據(jù)處理可以得到導(dǎo)軌全行程摩擦力——位移曲線。
2 系統(tǒng)方案設(shè)計
2.1 系統(tǒng)總體設(shè)計
導(dǎo)軌摩擦力自動測量系統(tǒng)由運動控制系統(tǒng)、測量系統(tǒng)、測試軟件和機(jī)械結(jié)構(gòu)組成,如圖3 所示。
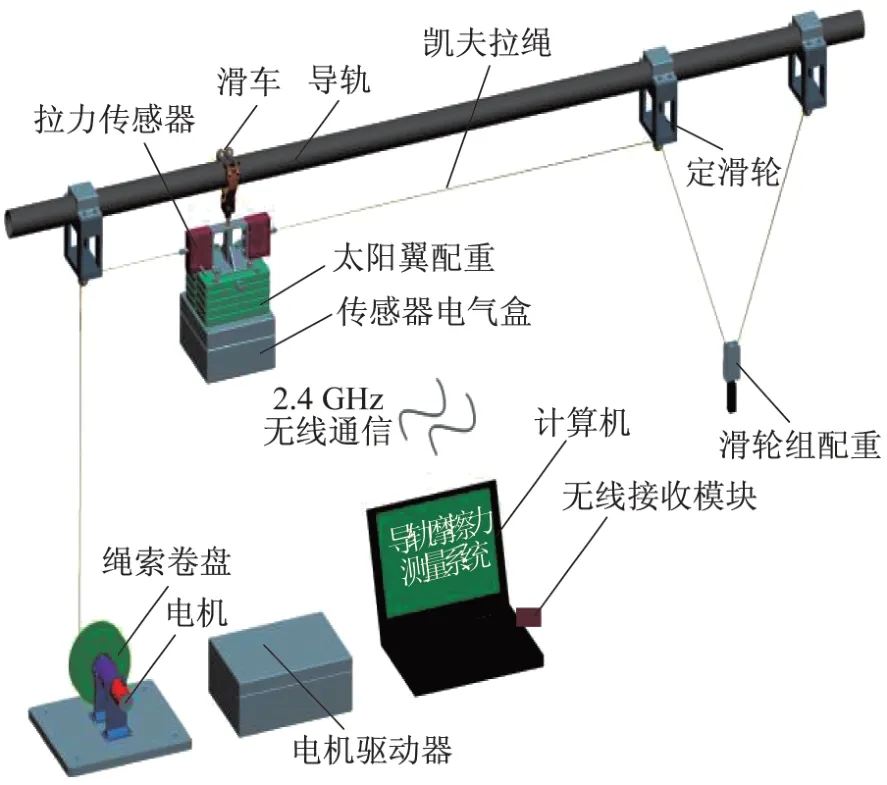
圖3 導(dǎo)軌摩擦力測量系統(tǒng)Fig.3 Schematic diagram of the friction measurement system for guide rail
縱向?qū)к墸ɑ驒M向?qū)к墸┥习惭b了滑車組件,滑車組件下面安裝有太陽翼模擬配重和無線通信模塊。導(dǎo)軌兩端分別固定了幾個定滑輪,電機(jī)通過凱夫拉繩牽引滑車組件在導(dǎo)軌上勻速運動。滑車組件的前端和后端分別連接了2 個測力傳感器,測量時,測力傳感器與在導(dǎo)軌上運動的滑車組件固定,分別測量出由驅(qū)動系統(tǒng)提供給滑車組件的驅(qū)動力F
和由尾端配重塊提供的控制阻力F
。拉力傳感器通過傳感器變送器轉(zhuǎn)化為模擬電壓信號,無線通信模塊對模擬量信號進(jìn)行濾波等處理后發(fā)送至無線接收模塊,之后無線接收模塊上傳數(shù)據(jù)至計算機(jī),計算機(jī)在經(jīng)過進(jìn)一步的濾波降噪處理后,基于軟件(軟件原理是依據(jù)牛頓經(jīng)典力學(xué)定律f
=F
-F
)完成摩擦力的計算。當(dāng)滑車組件勻速運動時,2 個測力傳感器的測力差值即為摩擦力f
,由計算機(jī)實時處理和顯示出摩擦力-位移曲線,生成測試報告,并將測量數(shù)據(jù)存入數(shù)據(jù)庫。根據(jù)測量原理,滑車組件的運行加速度要盡可能小,所以采用速度閉環(huán)控制系統(tǒng),筆記本電腦通過USB 與電機(jī)驅(qū)動器通信,實時獲取電機(jī)的轉(zhuǎn)速信息,通過PID 算法控制電機(jī)平穩(wěn)運行。
通過分析,拉力傳感器若采用電纜供電和傳輸信號,太陽翼模擬配重與滑車組件處于軟連接,電纜在滑車運動過程中會導(dǎo)致滑車組件發(fā)生周期性擺動,從而導(dǎo)致摩擦力曲線震蕩,造成摩擦力測量失真。因此,系統(tǒng)方案采用無線測量方案。
2.2 測量系統(tǒng)設(shè)計
測量系統(tǒng)由拉力傳感器、拉力傳感器變送器、無線通信模塊和計算機(jī)軟件組成,如圖4 所示。拉力傳感器LRF400 的信號通過配套拉力傳感器變送器CSG110 轉(zhuǎn)化為模擬電壓信號,由系統(tǒng)級芯片(System on Chip,SOC)微控制器C8051F340 負(fù)責(zé)采集模擬電壓信號,并進(jìn)行濾波等處理。由2.4 GHz 無線通信芯片CC2530 組成ZIGBEE 網(wǎng)絡(luò),進(jìn)行無線互聯(lián)。無線通信模塊將模擬量信號發(fā)送至無線接收模塊,之后無線接收模塊上傳數(shù)據(jù)至計算機(jī)。計算機(jī)在經(jīng)過進(jìn)一步的濾波降噪處理后,基于軟件完成摩擦力的計算。當(dāng)滑車勻速運動時,傳感器的差值即為摩擦力,由計算機(jī)實時處理并顯示出摩擦力——位移曲線,并將測量數(shù)據(jù)存入數(shù)據(jù)庫。
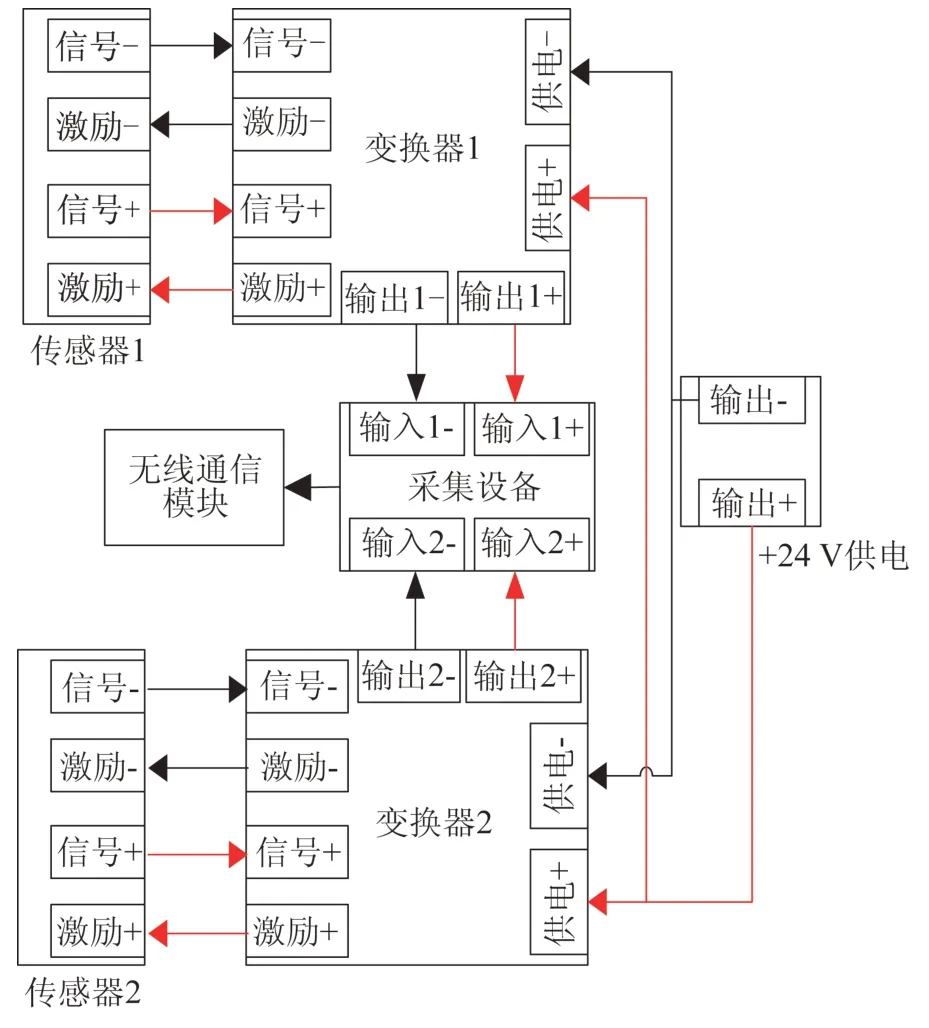
圖4 無線測力傳感器節(jié)點Fig.4 Schematic diagram of the wireless load cell nodes
2.3 運動控制系統(tǒng)設(shè)計
運動控制系統(tǒng)驅(qū)動組件由電機(jī)、編碼器、減速器、繩索卷盤等部分組成,如圖5 所示。

圖5 運動控制節(jié)點示意圖Fig.5 Schematic diagram of the motion control nodes
根據(jù)展開試驗裝置相關(guān)參數(shù),滑輪組配重質(zhì)量為0.2 kg,滑車移動速度最大值為0.02 m/s。考慮定滑輪靜摩擦力(0.3 N)及繩索傳動損失為10%,因此驅(qū)動裝置對繩索牽引力為

F
為滑車驅(qū)動力;m
為滑輪組配重質(zhì)量。繩索繞在驅(qū)動裝置的圈盤上,繩索卷盤直徑為200 mm,因此驅(qū)動裝置輸出扭矩、功率和轉(zhuǎn)速為
M
為驅(qū)動裝置輸出扭矩;P
為驅(qū)動裝置輸出功率;ω
為驅(qū)動裝置輸出轉(zhuǎn)速;d
為繩索卷盤有效直徑;V
為滑車組件的運動速度。驅(qū)動裝置牽引力較大,運動速度較慢,因此適合選一款功率較小的電機(jī)與減速機(jī)方案。考慮到配重懸掛在空中,必須保證其不會在驅(qū)動裝置斷電故障情況下失速掉落。因此,采用抱閘制動器的方式,避免了因電機(jī)斷電、配重拖動電機(jī)產(chǎn)生危險的情況。
繩索卷盤直徑200 mm,槽寬30 mm,深度15 mm。直徑1 mm、長6 m 的凱夫拉繩在環(huán)繞卷盤時僅需纏繞10 圈,繩索不會發(fā)生疊加纏繞,不會產(chǎn)生纏繞直徑的變化。滑車組件在導(dǎo)軌上位移S
可直接由電機(jī)轉(zhuǎn)速計算:
n
為凱夫拉繩在繩索卷盤中的纏繞圈數(shù);L
為凱夫拉繩長;S
為滑車組件在導(dǎo)軌上的運動位移;t
為滑車組件在導(dǎo)軌上的運動時間。配重端滑輪組由2 個定滑輪和1 個動滑輪組成。根據(jù)動滑輪的特性,配重運動行程為凱夫拉繩移動行程的1/2,這樣配重運動行程就小于展開試驗裝置凈高,避免配重落地失效。同時2 個定滑輪將凱夫拉繩在遠(yuǎn)端拉開,避免繩子由于纏繞而產(chǎn)生測量誤差。同時3 個定滑輪以及滑車匹配件在設(shè)計上保證凱夫拉繩的水平性,保證了滑車在運動過程中的水平性,以及電機(jī)拉力的方向性,也避免由于繩索不水平而產(chǎn)生的測量誤差。
2.4 測量軟件設(shè)計
測量系統(tǒng)上位機(jī)軟件主界面如圖6 所示,上位機(jī)軟件采用LabVIEW 進(jìn)行設(shè)計,主要完成電機(jī)控制、傳感器電信號采集、電信號變換以及數(shù)據(jù)實時顯示存儲功能。主界面主要由3 個區(qū)域組成,分別為測試實時曲線顯示區(qū)(圖6 中的①區(qū))、程序控制器區(qū)(圖6 中的②區(qū))、測試控制區(qū)(圖6 中的③區(qū))。
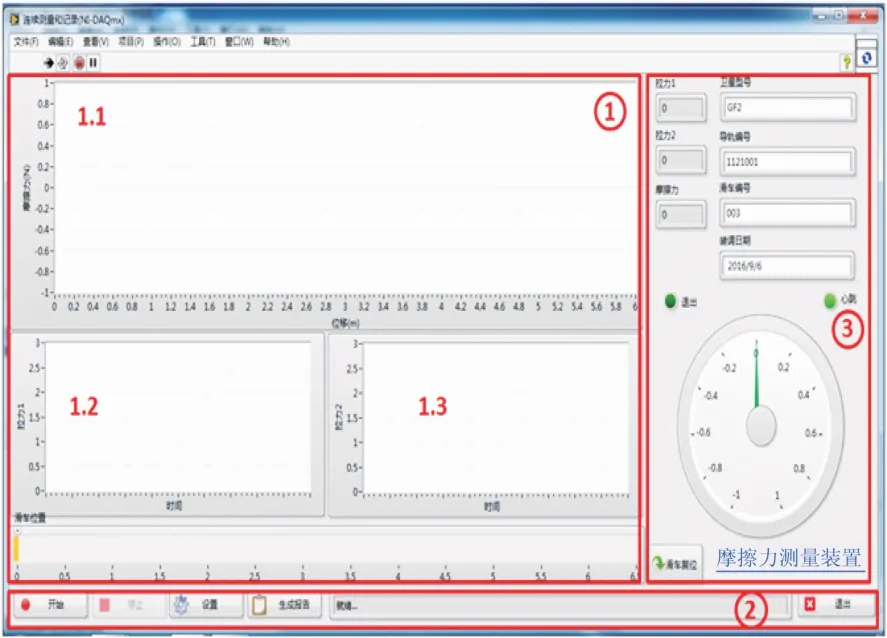
圖6 軟件主界面Fig.6 Schematic diagram of the main interface of the software
圖6 中的①區(qū)的1.1 為摩擦力-位移的實時曲線繪制,1.2 為滑車前向拉力值實時曲線,1.3 為滑車后向拉力值實時曲線。②區(qū)中的“開始”“停止”按鈕可用于啟動和停止滑車移動;“配置”按鈕可用于配置測量傳感器端口配置、電機(jī)端口配置、電機(jī)運動參數(shù)配置和測量項目參數(shù)配置等;“生成報告”按鈕可用于自動根據(jù)測試數(shù)據(jù)生成測試報告。③區(qū)中的“滑車復(fù)位”按鈕用于自動完成滑車復(fù)位。
3 系統(tǒng)試驗驗證
3.1 樣機(jī)測試驗證
為了驗證測量系統(tǒng),對其主要技術(shù)指標(biāo)進(jìn)行試驗分析。在某衛(wèi)星型號太陽翼展開試驗裝置進(jìn)行了導(dǎo)軌摩擦力測試,導(dǎo)軌摩擦力自動測量系統(tǒng)樣機(jī)如圖7 所示。
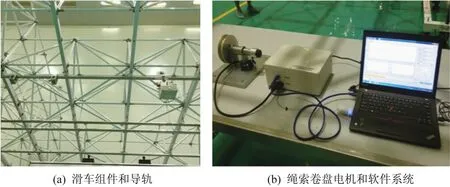
圖7 導(dǎo)軌摩擦力測量系統(tǒng)樣機(jī)照Fig.7 Pictures of the friction measurement system for guide rail
按照衛(wèi)星型號太陽翼要求進(jìn)行軟件配置完成后,點擊主界面“開始”按鈕,測試軟件自動控制電機(jī)運行,實時采集拉力傳感器輸出,并根據(jù)位移、拉力數(shù)據(jù)實時繪制摩擦力-位移曲線。導(dǎo)軌摩擦力自動測量系統(tǒng)的軟件測試過程如圖8 所示。
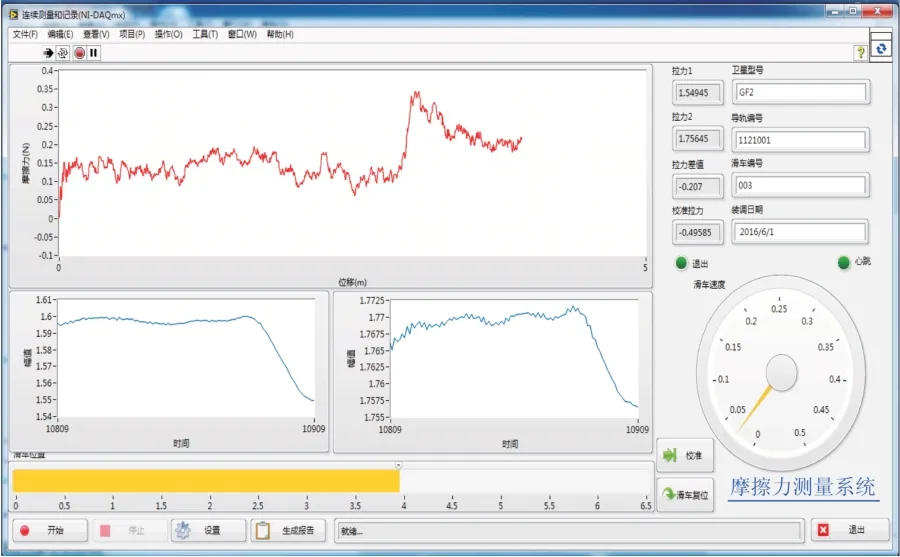
圖8 測試過程Fig.8 Test process
采用導(dǎo)軌摩擦力自動測量系統(tǒng)對某衛(wèi)星型號太陽翼展開試驗裝置導(dǎo)軌摩擦力進(jìn)行測試,為測試自動測量系統(tǒng)相關(guān)測量性能,分別采用5 mm/s 的運動速度從導(dǎo)軌的左端到右端和采用20 mm/s 的運動速度從導(dǎo)軌的右端到左端進(jìn)行自動測量,摩擦力測量結(jié)果如圖9 和圖10 所示。
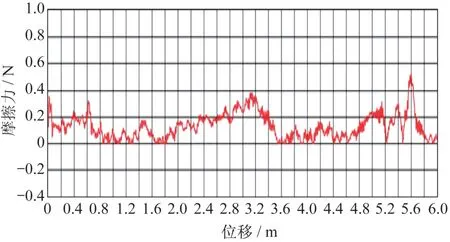
圖9 5 mm/s 速度時導(dǎo)軌摩擦力-位移曲線Fig.9 Friction-displacement curve of the guide rail at 5 mm/s
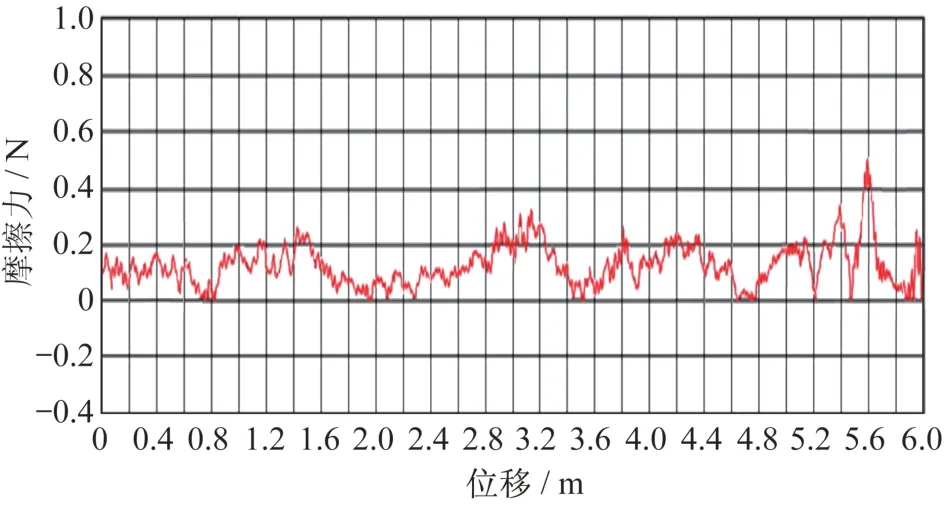
圖10 20 mm/s 速度時導(dǎo)軌摩擦力-位移曲線Fig.10 Friction-displacement curve of the guide rail at 20 mm/s
由測試結(jié)果可知:摩擦力曲線啟動階段有1 段波峰,由于電機(jī)在啟動時,滑車組件處于加速階段,存在輕微沖擊力;由于太陽翼展開測試不會使用導(dǎo)軌起始段和末尾端,這段摩擦力啟動波峰可忽略不計。通過對同一根導(dǎo)軌進(jìn)行不同速度的性能測試,測量結(jié)果表明自動測量系統(tǒng)測量重復(fù)性良好。太陽翼展開試驗裝置導(dǎo)軌有效行程6 m 范圍內(nèi)摩擦力測量結(jié)果最大值為0.422 5 N,且吊掛導(dǎo)軌摩擦力測量峰值為導(dǎo)軌右端末尾,可根據(jù)導(dǎo)軌摩擦力-位移曲線,定位展開試驗裝置導(dǎo)軌摩擦力峰值位置,并進(jìn)行精確調(diào)試,保證太陽翼地面零重力展開可靠性。
3.2 對比測試驗證
為驗證導(dǎo)軌摩擦力自動測量系統(tǒng)測試結(jié)果,采用傳統(tǒng)手持測力計測量摩擦力方法和導(dǎo)軌摩擦力自動測量系統(tǒng)摩擦力方法,分別對同一根展開試驗裝置導(dǎo)軌進(jìn)行導(dǎo)軌摩擦力測量,將速度5 mm/s 時的導(dǎo)軌摩擦力自動測量值與手動測量值進(jìn)行對比。手動測量方法在導(dǎo)軌上間隔0.5 m 依次用彈簧拉力計緩慢地拉動滑車組件使之勻速運動,拉力計的讀數(shù)即為該速度下的導(dǎo)軌摩擦力大小。摩擦力測量結(jié)果如圖11 所示。導(dǎo)軌摩擦力自動測量系統(tǒng)測量精度主要包括傳感器測量精度、滑車組件晃動、電機(jī)運動速度精度和凱夫拉繩傳動摩擦等誤差影響,以上大部分誤差影響分量在信號采集濾波中被消除。手動拉力計測量精度主要包括拉力計測量精度、手持拉力計水平度和拉動運動速度精度等誤差影響,除拉力計測量精度外,其他誤差影響可忽略。因此對比2 種測量方法測試精度均取測量傳感器精度進(jìn)行比較。測量結(jié)果對比見表1。
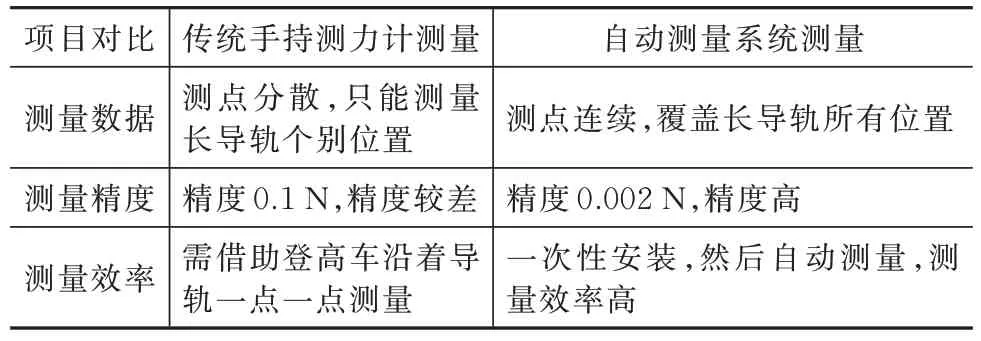
表1 導(dǎo)軌摩擦力測量結(jié)果對比Tab.1 Comparison of the friction measurement results of the guide rail
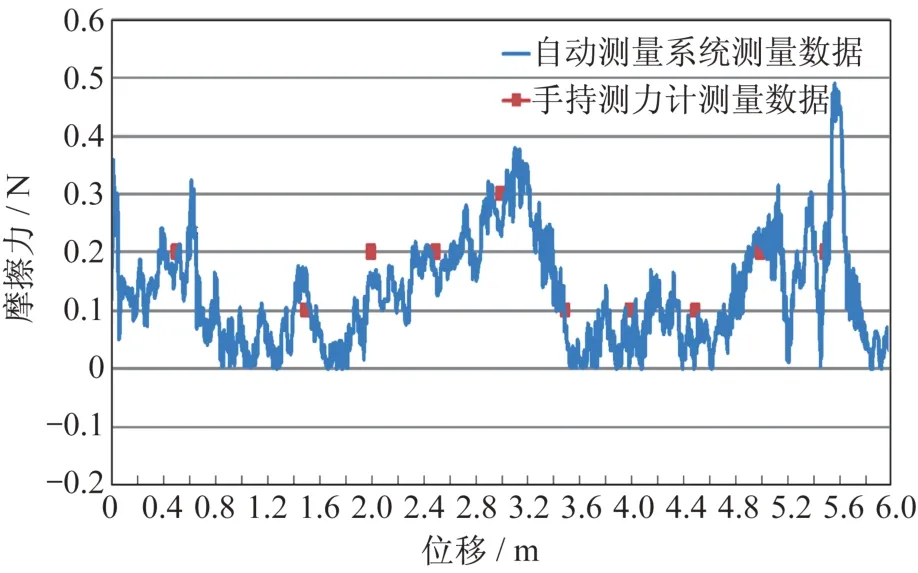
圖11 導(dǎo)軌摩擦力測量結(jié)果Fig.11 Friction measurement results of the guide rail
將采用傳統(tǒng)手持測力計測量摩擦力方法和導(dǎo)軌摩擦力自動測量系統(tǒng)摩擦力測量方法,對相同導(dǎo)軌進(jìn)行導(dǎo)軌摩擦力測量結(jié)果進(jìn)行對比,導(dǎo)軌摩擦力自動測量系統(tǒng)的測量結(jié)果測點連續(xù),可覆蓋全部導(dǎo)軌行程,測量效率更高。根據(jù)測量結(jié)果可直接定位展開試驗裝置導(dǎo)軌需要調(diào)試的位置,并進(jìn)行精確調(diào)試,縮短太陽翼地面零重力展開試驗的準(zhǔn)備周期,以及提高太陽翼地面零重力展開可靠性。
4 結(jié)束語
本文針對太陽翼地面零重力展開可靠性驗證中導(dǎo)軌摩擦力測量問題,研制了一套自動化高精度導(dǎo)軌摩擦力測量系統(tǒng),實現(xiàn)了自動化、快速、全行程測量太陽翼展開試驗裝置導(dǎo)軌摩擦力。該系統(tǒng)已經(jīng)在多個衛(wèi)星型號太陽翼生產(chǎn)中投入使用,性能穩(wěn)定可靠,提高了衛(wèi)星太陽翼生產(chǎn)效率。該系統(tǒng)方便攜帶,測試方便,具有很強(qiáng)的工程實用性和推廣價值。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45