直流有刷電機在按摩椅中的應(yīng)用
2022-01-05 10:51:32劉燦華何紹健
微特電機 2021年12期
關(guān)鍵詞:舒適性
劉燦華,何紹健,楊 廉
(寧德職業(yè)技術(shù)學院機電工程系,福安 355000)
0 引 言
在生活節(jié)奏不斷加快,社會競爭日益激烈的當今社會,越來越多的人處于“亞健康”狀態(tài)。依據(jù)世界衛(wèi)生組織資料顯示,目前世界范圍內(nèi)約有75%的人口正遭受著“亞健康”帶來的困擾[1]。保健按摩作為一種有效的擺脫“亞健康”的方式,越來越受到人們的推崇。電動按摩椅是一種全自動的保健按摩器具,其以豐富的功能與高性價比已成為家家戶戶家用電器當中不可缺少的一員[2]。同時,我國也發(fā)布了相關(guān)的國家標準[3],這些都促進了按摩椅行業(yè)的快速發(fā)展。
電動按摩椅發(fā)展至今,雖說技術(shù)已經(jīng)相對成熟,但仍然還有一些問題急需解決,其中舒適性問題是影響電動按摩椅進一步發(fā)展的一個重要問題。剖析目前市面上常見的電動按摩椅系統(tǒng)中的驅(qū)動電機,大多采用無反饋環(huán)節(jié)的有刷直流電機,其控制方式依然停留在簡單的開環(huán)控制階段,當給電機兩端通電時,電機直接轉(zhuǎn)動,缺少一個速度調(diào)節(jié)的過程。當電機從停機狀態(tài)轉(zhuǎn)為全速狀態(tài)時,轉(zhuǎn)速直接由0增加到全速(如4 000 r/min),未有一個提速的過程,這就導致了按摩器具對人體的直接沖擊,使得按摩過程的舒適性大大降低。同時,未將轉(zhuǎn)動過程中的轉(zhuǎn)速信號反饋給控制電路,在針對不同體重的人群時,相同的檔位給出的轉(zhuǎn)速卻是不一樣的,這也造成了同樣檔位有些人感覺不到力量,有些人卻感覺力度太大。
針對以上問題,本文在傳統(tǒng)的電動按摩椅控制系統(tǒng)上選取帶有速度反饋的直流有刷電機,并提出了基于速度環(huán)增量式PID控制的按摩椅直流有刷電機控制方式,實現(xiàn)了電動按摩椅的舒適性提升。
1 按摩椅中的電機及控制算法
1.1 按摩椅中電機及性能需求
電動按摩椅的按摩區(qū)域主要分成兩個部分,即背部按摩區(qū)與腿部按摩區(qū)。背部區(qū)域的按摩功能主要通過一個由3~5個有刷電機組成的機芯實現(xiàn)揉捏、捶打以及上下行走功能。腿部按摩區(qū)域主要依靠4~6個有刷電機實現(xiàn)腳底滾輪按摩以及小腿的屈伸功能。因此,一臺常見的電動按摩椅大約需要10個直流有刷電機[4]。總的來說,按摩椅所需要的電機屬于小功率電機,其最大功率在50 W左右,額定電壓在24 V左右,額定轉(zhuǎn)速為1 200~4 000 r/min,電機最大直徑尺寸在38 mm左右。基于電動按摩椅按摩過程對揉捏、捶打的平穩(wěn)效果需求,其所使用的電機需要有良好的調(diào)速性能,而直流有刷電機以其結(jié)構(gòu)簡單、技術(shù)成熟、工藝性能優(yōu)良的特性,能夠廣泛應(yīng)用在電動按摩椅中[5]。而也正是由于直流有刷電機機械結(jié)構(gòu)上滿足了電動按摩椅的基本性能需求,在對舒適性要求不高的設(shè)計之初,電動按摩椅主要采用的是簡單的開環(huán)控制方式,沒有將電機轉(zhuǎn)動過程中的轉(zhuǎn)速等信息進行反饋,無法實現(xiàn)按摩過程舒適性提升。隨著人們對電動按摩椅舒適性要求的提高,對電動按摩椅的性能需求也從初期的只需要能夠?qū)崿F(xiàn)轉(zhuǎn)動及調(diào)速提高到能夠平穩(wěn)實現(xiàn)起動及調(diào)速的舒適過程,這時簡單的開環(huán)控制滿足不了此性能需求。因此,本文選取帶有霍爾傳感器與磁環(huán)的能夠反饋轉(zhuǎn)速信息的直流有刷電機。
1.2 按摩椅中直流有刷電機的控制算法
由于傳統(tǒng)的電動按摩椅電機控制多采用開環(huán)控制,無法實時反饋轉(zhuǎn)動情況,在追求舒適性的今天,有必要將反饋環(huán)節(jié)引入電動按摩椅電機的控制中。最為經(jīng)典的反饋方式即為PID控制,由PID相關(guān)理論知識可知,PID算法可分為位置式與增量式[6]。
位置式PID控制算法每次輸出均與過去的狀態(tài)有關(guān),在運算過程中需對每次的偏差值進行累計,計算量大。同時,由于位置式PID的輸出對應(yīng)的是執(zhí)行機構(gòu)的實際參數(shù),若微機系統(tǒng)出現(xiàn)故障,輸出值將大幅變化,同時引起執(zhí)行機構(gòu)的大幅變化,對應(yīng)到電動按摩椅系統(tǒng)中,將導致電動按摩椅電機轉(zhuǎn)速大幅變化,降低舒適性及安全性。
增量式PID控制算法的每次輸出是速度控制量的增量,對應(yīng)到電動按摩椅系統(tǒng)中,即每次的控制輸出是在現(xiàn)有速度上疊加一個增量,從而實現(xiàn)控制過程的平穩(wěn)過渡。并且,增量式PID的運算過程計算量小,在控制芯片相對低價的電動按摩椅系統(tǒng)中可以得到廣泛的應(yīng)用。
另外,按摩椅執(zhí)行揉捏、捶打等動作過程中電機時刻保持著轉(zhuǎn)動,在控制過程中對電機運轉(zhuǎn)的位置要求不高,但對速度的性能要求相對較高。因此,在傳統(tǒng)的電動按摩椅有刷電機開環(huán)控制基礎(chǔ)上,修改硬件電路并且將增量式速度環(huán)PID控制算法移植到軟件程序中,實現(xiàn)電動按摩椅起動及調(diào)速過程的平穩(wěn)過渡,提升按摩椅工作過程的舒適性。
2 硬件電路
本文設(shè)計的電動按摩椅用直流有刷電機驅(qū)動電路具備轉(zhuǎn)速控制、方向控制及轉(zhuǎn)速測量功能,硬件方案如圖1所示。其中,操作面板能夠發(fā)送與接收轉(zhuǎn)速信息;直流有刷電機尾部配有霍爾傳感器與磁環(huán),能夠?qū)⑥D(zhuǎn)動過程的信息傳遞給測速模塊;直流有刷電機驅(qū)動模塊能夠接收微控制器發(fā)送的PWM信號,從而驅(qū)動直流有刷電機,實現(xiàn)電機轉(zhuǎn)速控制與方向控制功能;測速模塊能夠獲取直流電機提供的霍爾信號,并且經(jīng)過測速模塊的處理輸出方波信號到微處理器中進行PID運算,平穩(wěn)地調(diào)節(jié)電機轉(zhuǎn)速。其中,電機驅(qū)動模塊與測速模塊是硬件電路的主要組成部分,下面將具體介紹。
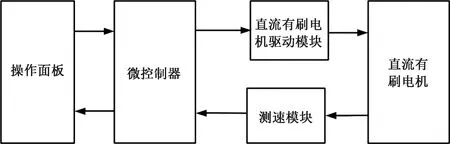
圖1 帶有速度反饋的電動按摩椅硬件方案圖
2.1 直流有刷電機驅(qū)動模塊
本文基于L298N芯片,結(jié)合按摩椅的性能需求,設(shè)計了基于L298N的直流有刷電機控制硬件電路,如圖2所示。L298N芯片是ST公司生產(chǎn)的一種高電壓、大電流的電機驅(qū)動芯片,內(nèi)部集成了兩個H橋的高電壓大電流的全橋式驅(qū)動器,故一個芯片為按摩椅中的多個直流有刷電機提供驅(qū)動[7]。
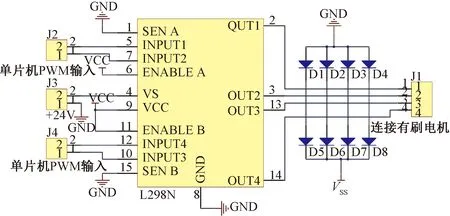
圖2 按摩椅直流有刷電機驅(qū)動電路
圖2中,4腳可依據(jù)所選的電機接入12 V或者24 V,最大可達46 V。9腳連接VCC,VCC(5 V)為保證L298N工作需要的電源。D1~D8為8個續(xù)流二極管,是為了消除電機轉(zhuǎn)動時的尖峰電壓保護電機而設(shè)計的。6腳和11腳為兩路電機通道的使能開關(guān),高電平使能,可以直接接高電平,也可以交由單片機控制。5、7、10、12腳為連接單片機的驅(qū)動輸入引腳,2、3、13、14腳為連接電機的驅(qū)動輸出引腳,其驅(qū)動輸入引腳與驅(qū)動輸出引腳的狀態(tài)關(guān)系如表1所示。ENB、IN3和IN4相應(yīng)控制另一組電機狀態(tài)(OUT3和OUT4)。

表1 輸入引腳與輸出引腳狀態(tài)關(guān)系
2.2 測速模塊
測速模塊電路圖如圖3所示,其中U1為基于雙極半導體工藝設(shè)計的霍爾元件,IC2A為集成運放芯片,結(jié)合R2、C1等元件構(gòu)成了一個簡單的比較電路。當電機轉(zhuǎn)動過程帶動轉(zhuǎn)軸上的磁環(huán)運轉(zhuǎn),霍爾元件U1能檢測磁場變化從而輸出正弦波[8],如圖4所示。并且霍爾元件的頻率高到1 MHz,滿足最高4 000 r/min的電動按摩椅電機轉(zhuǎn)速性能需求。正弦波信號與比較電路的信號進行比較后即可從IC2A的1引腳輸出方波信號,如圖5所示,并由J5端口輸入到單片機中,進行轉(zhuǎn)速運算。
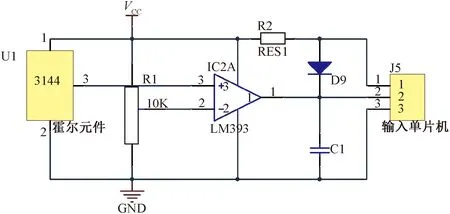
圖3 測速模塊電路
圖4 霍爾傳感器輸出信號
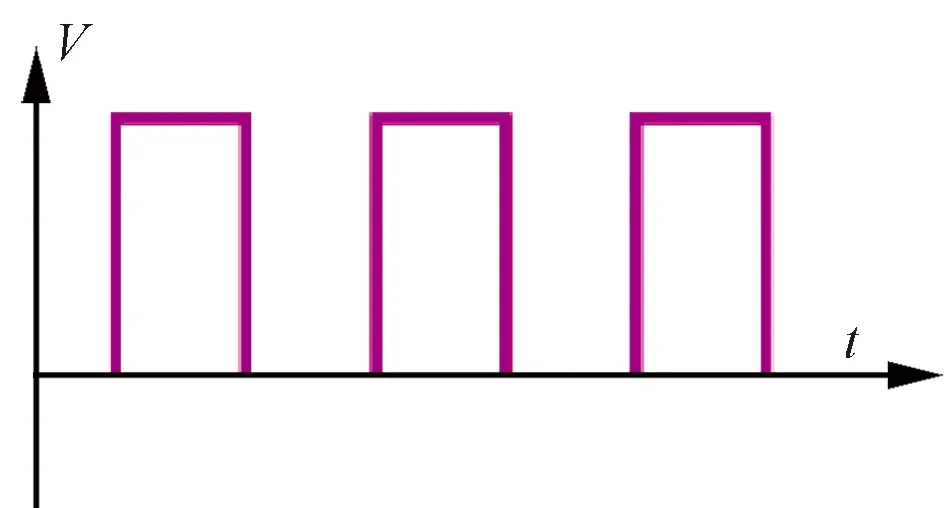
圖5 比較電路輸出信號
3 軟件程序
3.1 軟件系統(tǒng)描述
軟件程序系統(tǒng)如圖6所示,當程序啟動后進行相關(guān)模塊的初始化,包括定時器、中斷系統(tǒng)、相關(guān)IO端口等。當初始化結(jié)束后進入死循環(huán),實時接收操作面板發(fā)送的轉(zhuǎn)速檔位數(shù)據(jù)。每當發(fā)生檔位變化或者從靜止起動的過程中目標轉(zhuǎn)速與現(xiàn)有轉(zhuǎn)速產(chǎn)生差距,在PID運算模塊中對目標轉(zhuǎn)速與現(xiàn)有轉(zhuǎn)速進行實時運算,從而驅(qū)動定時器產(chǎn)生PWM發(fā)生器實時調(diào)整占空比,使得電機轉(zhuǎn)速從現(xiàn)有轉(zhuǎn)速平穩(wěn)過渡到目標轉(zhuǎn)速。

圖6 帶有速度反饋的電動按摩椅控制程序框圖
3.2 基于速度環(huán)的增量型PID控制算法
在電動按摩椅的整套控制程序中,PID運算部分的程序直接決定了按摩椅的舒適性。基于電動按摩椅按摩過程的平穩(wěn)性及可靠性的功能需求,本文選取了基于速度環(huán)的增量型PID控制算法。針對速度環(huán)的PID控制過程如圖7所示,每當所測得的現(xiàn)有轉(zhuǎn)速Vt與目標轉(zhuǎn)速Vi存在偏差時,所測得的偏差將輸入到PID運算單元中,經(jīng)過運算后將偏差量直接輸入到定時器模塊,設(shè)置相應(yīng)的PWM輸出,驅(qū)動電機進行調(diào)速。
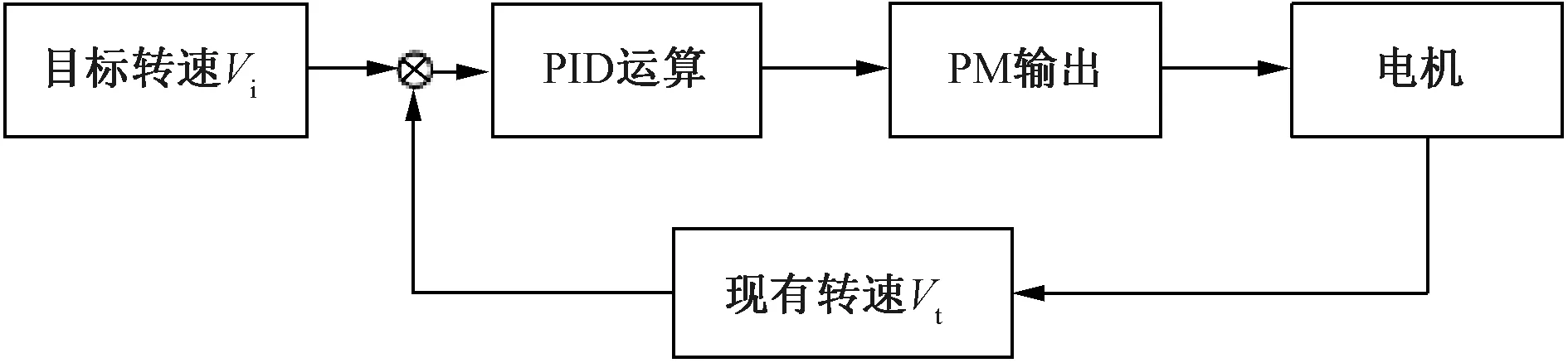
圖7 速度環(huán)PID工作流程圖
速度環(huán)的增量式PID調(diào)節(jié)公式如下:
Δu(k)=Kp[e(k)-e(k-1)]+Kie(k)+
Kd[e(k)-2e(k-1)+e(k-2)]
式中:e(k)為第k次的目標轉(zhuǎn)速Vi與現(xiàn)有速度Vt的誤差;Kp為比例系數(shù);Ki為積分系數(shù);Kd為微分系數(shù)。
可以看出,每次的偏差只與前三次的誤差相關(guān),計算誤差對控制量計算的影響較小。而位置式算法要對近幾次的偏差進行積分累加,容易產(chǎn)生較大的累加誤差。另外,增量式算法得出的是控制量的增量,在速度控制中,只輸出速度的變化部分,誤動作影響小,必要時還可通過邏輯判斷限制或禁止本次輸出,不會嚴重影響系統(tǒng)的工作;而位置式的輸出直接對應(yīng)對象的輸出,對系統(tǒng)影響較大。因此,針對本文設(shè)計的電動按摩椅系統(tǒng)中的有刷直流電機調(diào)速控制,速度環(huán)的增量式PID控制算法能較好地適應(yīng)并切入微處理器中。
4 測試實驗
為了測試不同轉(zhuǎn)速下的運轉(zhuǎn)狀況以及速度環(huán)增量式PID調(diào)速所消耗的時間,本文選取了一款帶有霍爾傳感器的直流有刷電機,其額定電壓為24 V,最大轉(zhuǎn)速Vmax為4 000 r/min。按照按摩椅中的力度要求選取了5個力度,計算出相對應(yīng)的占空比并測試運轉(zhuǎn)情況,記錄從靜止起動到對應(yīng)穩(wěn)定轉(zhuǎn)速消耗的時間,多次測量取平均值后的測試結(jié)果如表2所示。
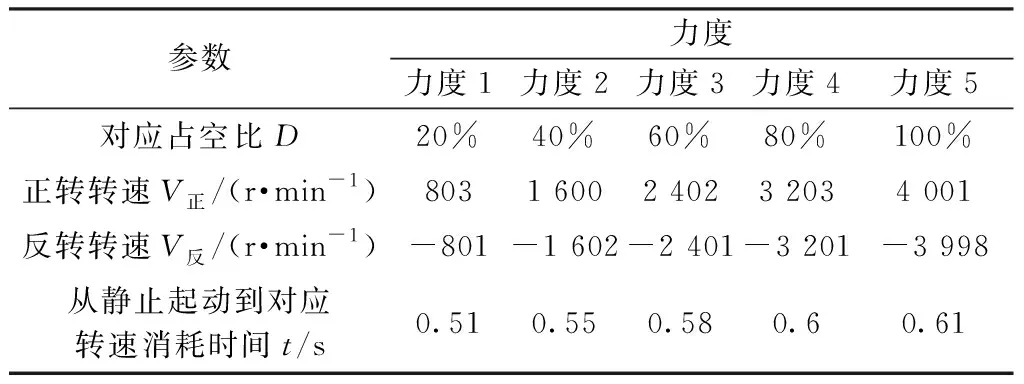
表2 不同力度下的轉(zhuǎn)速及消耗時間測試
從測試結(jié)果可以看出,不同力度對應(yīng)不同的占空比,所測得的轉(zhuǎn)速穩(wěn)定。并且,從靜止到對應(yīng)的穩(wěn)定轉(zhuǎn)速所消耗的時間基本在0.6 s左右,這樣的PID速度調(diào)節(jié)時間既不會讓人感覺調(diào)速過慢,也不會使人們感覺速度突然上升,達到電動按摩椅的舒適性要求。因此,所測試的直流有刷電機及改進的驅(qū)動電路適用于按摩椅產(chǎn)品應(yīng)用。
5 結(jié) 語
本文分析了電動按摩椅在我國的廣泛使用情況,并針對現(xiàn)有按摩椅中直流有刷電機的開環(huán)控制存在的問題,將基于速度環(huán)增量式PID控制的直流有刷電機用在按摩椅中。在選擇帶有霍爾傳感器的直流有刷電機之后,改進了相應(yīng)的硬件控制電路,并設(shè)計基于速度環(huán)的增量式PID調(diào)速控制軟件系統(tǒng),實現(xiàn)了直流有刷電機的正反轉(zhuǎn)及速度控制,所測試的調(diào)速時間在0.6 s左右,滿足按摩椅舒適性要求。
猜你喜歡
福建輕紡(2022年4期)2022-06-01 06:26:06
載人航天(2021年5期)2021-11-20 06:04:36
毛紡科技(2021年8期)2021-10-14 06:51:26
現(xiàn)代儀器與醫(yī)療(2021年2期)2021-07-21 02:19:12
紡織科技進展(2021年3期)2021-06-09 08:07:18
建筑熱能通風空調(diào)(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
工業(yè)設(shè)計(2016年11期)2016-04-16 02:48:02
消費者報道(2016年3期)2016-02-28 19:07:32
汽車實用技術(shù)(2015年8期)2015-12-26 09:01:02
