軌道交通用直線電動機的電磁力特性分析
2022-01-05 10:51:18張樹鑫黃蘇丹曹廣忠丁菊霞
微特電機 2021年12期
關鍵詞:有限元
張樹鑫,黃蘇丹,曹廣忠,吳 超,丁菊霞
(1.深圳大學 機電與控制工程學院 廣東省電磁控制與智能機器人重點實驗室,深圳 518060;2.西南交通大學 電氣工程學院,成都 611756)
0 引 言
城市軌道交通領域中,傳統輪軌式列車的牽引系統采用旋轉電機作為動力源,通過傳動裝置將旋轉運動轉換為直線運動,這種驅動方式具有體積大、噪聲大、機械磨損大、維護成本高等問題[1]。目前,新型軌道交通牽引系統采用直線電動機作為動力源,由于其具有非黏著驅動、結構簡單、功率因數和效率較高、噪聲較低、維護成本低等特點[2],已被成功應用于地鐵和磁懸浮列車。與傳統輪軌式列車相比,直線電動機牽引的列車的爬坡能力更強、轉向半徑更小、建設成本更低、城市多建筑環境的適應性更強、線路規劃更靈活。直線電動機列車牽引力傳遞不受車輪與鋼軌之間的黏著限制,可進一步提高速度、減小噪聲,爬坡能力從輪軌式列車的30‰提升至80‰,轉向半徑由輪軌式列車的250 m減小至80 m[3]。
目前,軌道交通用直線電動機主要有直線感應電機(以下簡稱LIM)和直線永磁同步電機(以下簡稱LPMSM)兩類。LIM主要應用于中低速城市軌道交通,一般采用單邊型電機,有長初級和短初級兩種結構。LPMSM具有效率和推力密度高、可控性好等優點,適用于高速城際軌道交通[4]。此外,直線開關磁阻電機(以下簡稱LSRM)具有結構簡單、可靠性高、成本低等特點,逐漸受到軌道交通領域的關注,有潛力應用于軌道交通的牽引系統[5]。
直線電動機的電磁力特性直接決定軌道交通牽引系統的性能,因此,提高直線電動機電磁性能是軌道交通用直線電動機的主要研究方向。
LIM牽引的列車,電機氣隙一般設置為9~12 mm,電機效率可達70%~80%,牽引能耗比同等水平的旋轉感應電機高10%~20%,此外,由于受縱向、橫向邊緣效應和次級集膚效應等影響,電機牽引性能較低。針對上述問題,國內外學者提出了多種軌道交通用LIM的改進方案。文獻[6]提出了一種三維線性分析和二維非線性分析結合的計算方法,可減小計算成本,并能夠快速獲得LIM在不同工況下的電磁參數,使其能夠更好地控制電機運行。文獻[7]研究次級斷續情況下的LIM推力特性,提出LIM的分段式等效電路模型,進而計算得到次級斷續時的推力、氣隙傳遞的無功功率、損耗等參數動態變化情況。文獻[8]提出了一種新型快速仿真方法,通過考慮磁時諧和靜磁問題的二維有限元,進而分析大氣隙LIM的性能和參數。文獻[9]提出了一種利用電感線圈附加部分補償LIM縱向邊端效應的方法,從而減小電磁不對稱產生的電磁力計算誤差。文獻[10]研究LIM定子結構優化設計以減小端部效應的影響,并采用正向擴張三角形定子槽方案以減小氣隙磁場畸變,進而提高電機的電磁力特性。
LPMSM牽引的列車,由于存在邊端效應、飽和效應、齒槽效應和繞組開斷引起的各相互感不對稱等影響,電機牽引過程的推力波動較大,進而增加了控制難度。針對上述問題,國內外學者提出了多種軌道交通用LPMSM的改進方法。文獻[11]針對LPMSM電磁力波動大等問題,采用優化鐵心邊端齒方法,抑制鐵心開端引起的磁路不對稱而產生的推力波動,提出不等匝數繞組結構抑制繞組空間位置不對稱引起的推力波動。文獻[12]提出了一種新型線圈拓撲結構的無鐵心LPMSM,能夠提高電機的推力密度,但也會增大電磁力波動。文獻[13]提出了一種多核神經網絡滑模控制方法,能提高LPMSM的位置跟蹤性能和干擾抑制能力。
LSRM高度非線性的電磁特性使其難以獲得精確的電磁力模型,此外,電機的渦流效應將導致功率因數和效率降低。針對上述問題,文獻[14]提出了一種三維磁等效電路方法,進而實現LSRM磁鏈特性和電磁力特性的快速計算和分析。文獻[15]通過高溫超導線圈代替電機的勵磁線圈,從而提高電機的電磁特性。
綜上,軌道交通用直線電動機的電磁特性分析主要集中于單類型直線電動機的研究,缺乏上述三類軌道交通用直線電動機的電磁特性的比較研究。
本文針對軌道交通用LIM、LPMSM與LSRM三類電機,開展三類電機的電磁力特性分析研究,以期為軌道交通用直線電動機提供理論和設計參考。
1 直線電動機的電磁力解析模型
1.1 LIM的電磁力解析模型
LIM由初級鐵心、繞組和次級組成,其結構示意圖如圖1所示。初級繞組通入的交流電在電機氣隙中產生行波磁場,切割次級導體產生感應電流,感應電流與氣隙行波磁場相互作用產生電磁力。其電磁推力[16]:
(1)
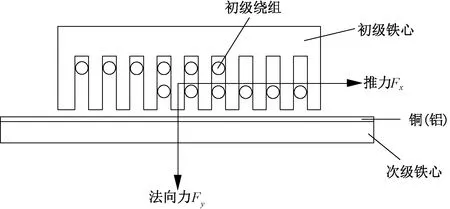
圖1 LIM結構示意圖

法向吸力Fan和法向斥力Frn:
(2)
式中:μ0為空氣磁導率;Ha為磁場感應強度;J2e為次級導電板電流密度;D為次級導電板厚度。
1.2 LPMSM的電磁力解析模型
LPMSM由初級鐵心、初級繞組、永磁體和次級鐵心組成,其結構示意圖如圖2所示。當初級繞組通入電流時,通電導體在永磁體產生磁場,進而使初級受到推力和法向力的作用。其推力Fx和法向力Fy分別如下:
(3)
式中:Bx,By分別是磁場強度在x和y軸上的分量;μ為材料磁導率;nx,ny分別是x軸和y軸的單位向量。
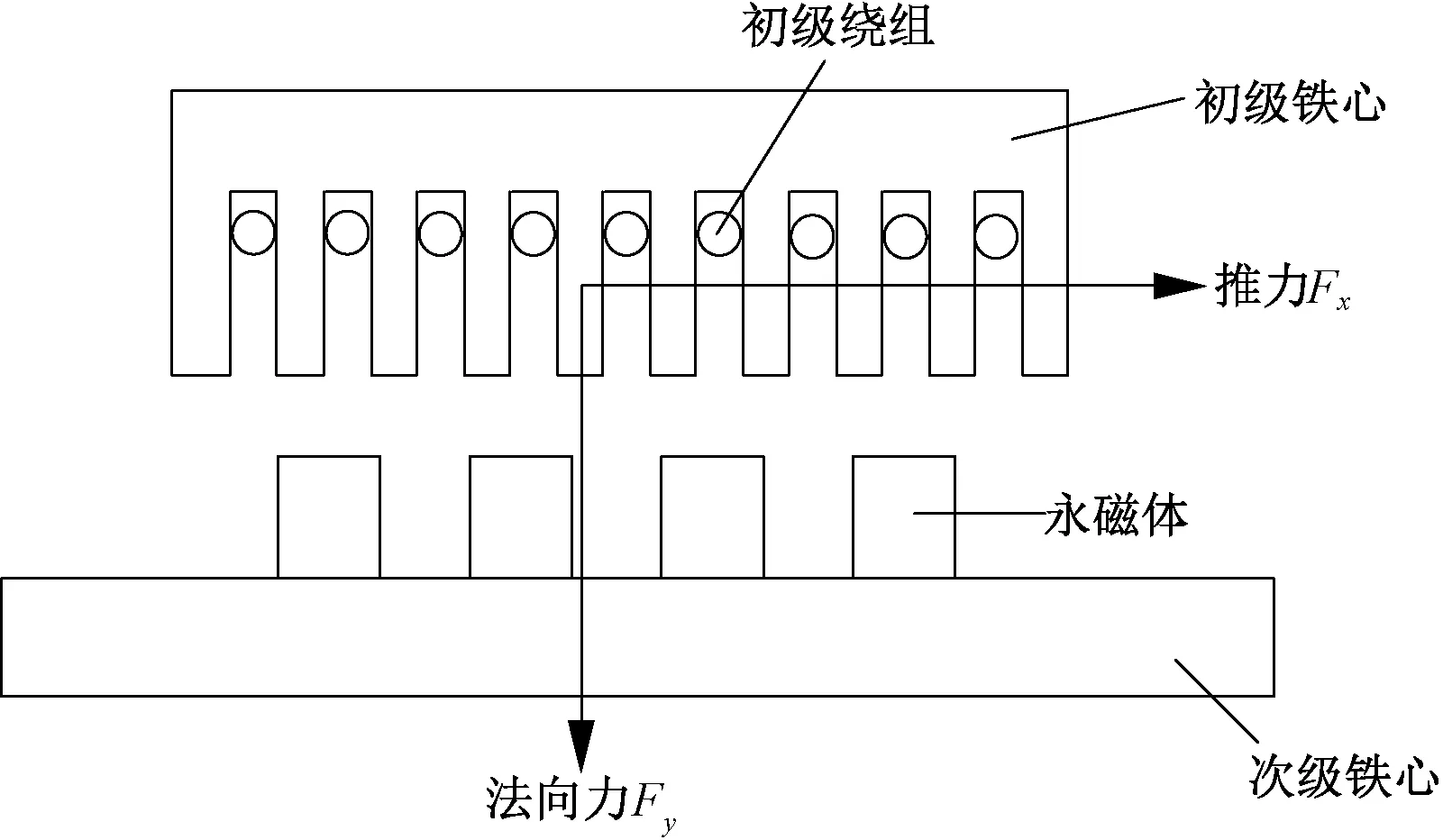
圖2 LPMSM結構示意圖
1.3 LSRM的電磁力解析模型
LSRM由初級鐵心、初級繞組和次級鐵心組成,其結構示意圖如圖3所示。LSRM利用磁阻最小原理工作,即磁通總是沿磁阻最小的路徑閉合。當初級和次級齒的中心線不重合即位于磁導非最大位置時,勵磁磁場產生的磁拉力將使次級移動到磁導最大的位置。其推力Fx和法向力Fy[17]:
(4)
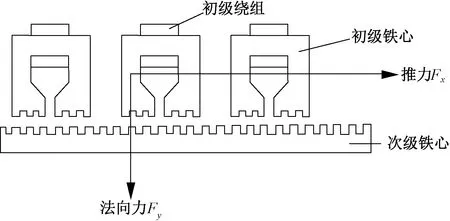
圖3 LSRM結構示意圖
式中:ij為第j相的電流;ψj為第j相的磁鏈;x,y分別為在水平和豎直方向的位置。
2 直線電動機的有限元電磁模型
通過參考軌道交通領域直線電動機結構的相關資料,設計LIM、LPMSM的結構。目前還沒有應用于軌道交通領域的LSRM,因此,根據軌道交通牽引動力性能需求設計LSRM。基于設計的三類電機結構,分別建立電機有限元電磁模型。
2.1 LIM的有限元電磁模型
設計的LIM主要尺寸參數如表1所示,建立的LIM有限元電磁模型如圖4所示。用于中低速軌道交通的LIM的氣隙一般在10~12 mm,本文采用10 mm氣隙。
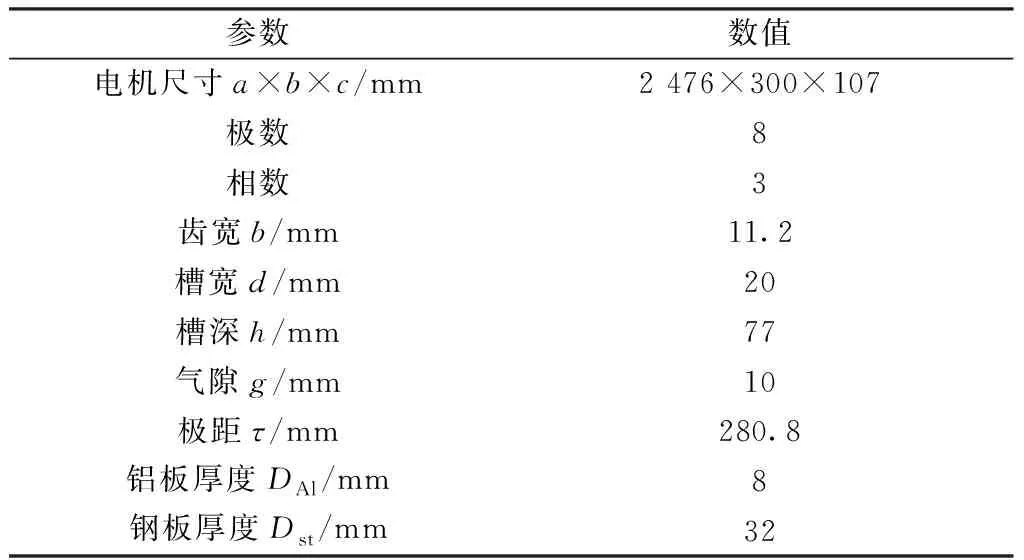
表1 LIM的主要尺寸參數
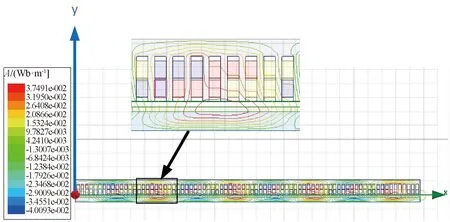
圖4 LIM有限元電磁模型
2.2 LPMSM的有限元電磁模型
設計的LPMSM主要尺寸參數如表2所示,建立的LPMSM有限元電磁模型如圖5所示。永磁結構為面貼式結構,次級背部沒有鐵心。為確保車輛高速行駛時的安全性,用于高速軌道交通的LPMSM的氣隙較大,一般為50 mm,是LIM的5倍左右。
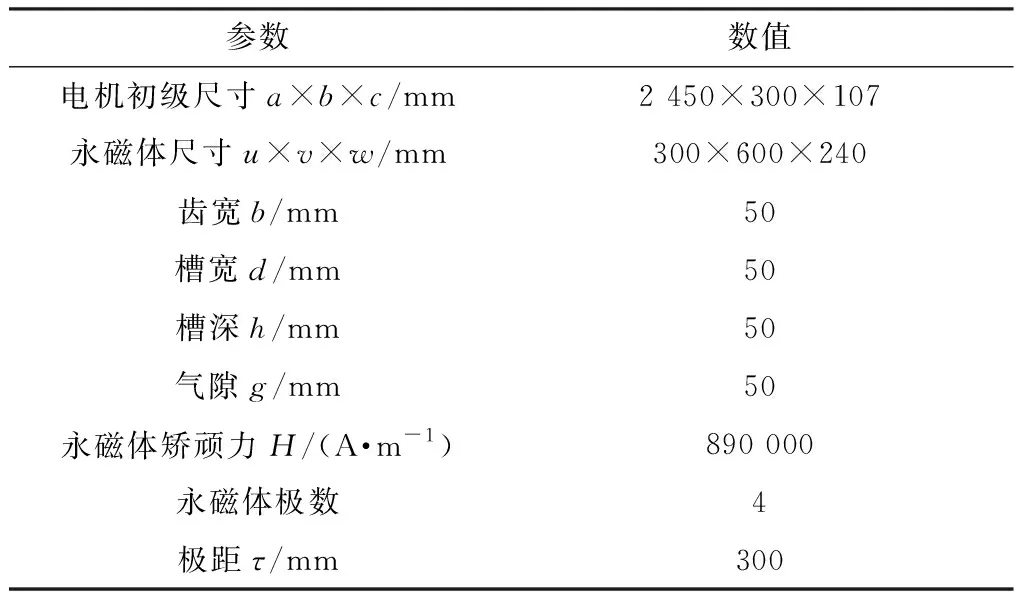
表2 LPMSM的主要尺寸參數

圖5 LPMSM的有限元電磁模型
2.3 LSRM的有限元電磁模型
設計的LSRM主要尺寸參數如表3所示,建立的LSRM有限元電磁模型如圖6所示。電機氣隙為3 mm。

表3 LSRM主要尺寸參數
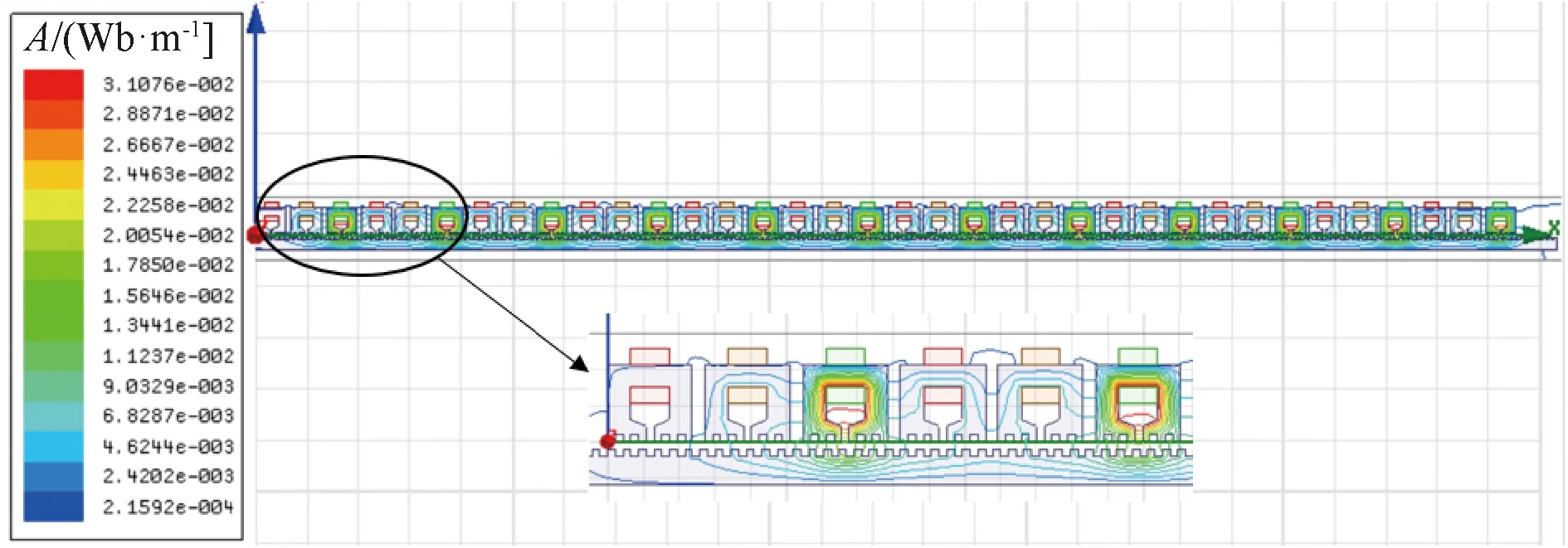
圖6 LSRM有限元電磁模型
3 直線電動機的電磁力特性分析
3.1 LIM的電磁力特性分析
(1)位置對電磁力的影響
軌道交通用單個電機的推力一般要求至少達到4 000 N,三種電機需輸入200 A以上的電流幅值才能產生4 000 N以上的推力,因此分析200 A電流幅值下的電機電磁力特性。當初級電流幅值為200 A,頻率為20 Hz時,初級和次級在一個極距內的不同相對位置下穩定后的推力、法向力和推力密度變化情況如表4和圖7所示。
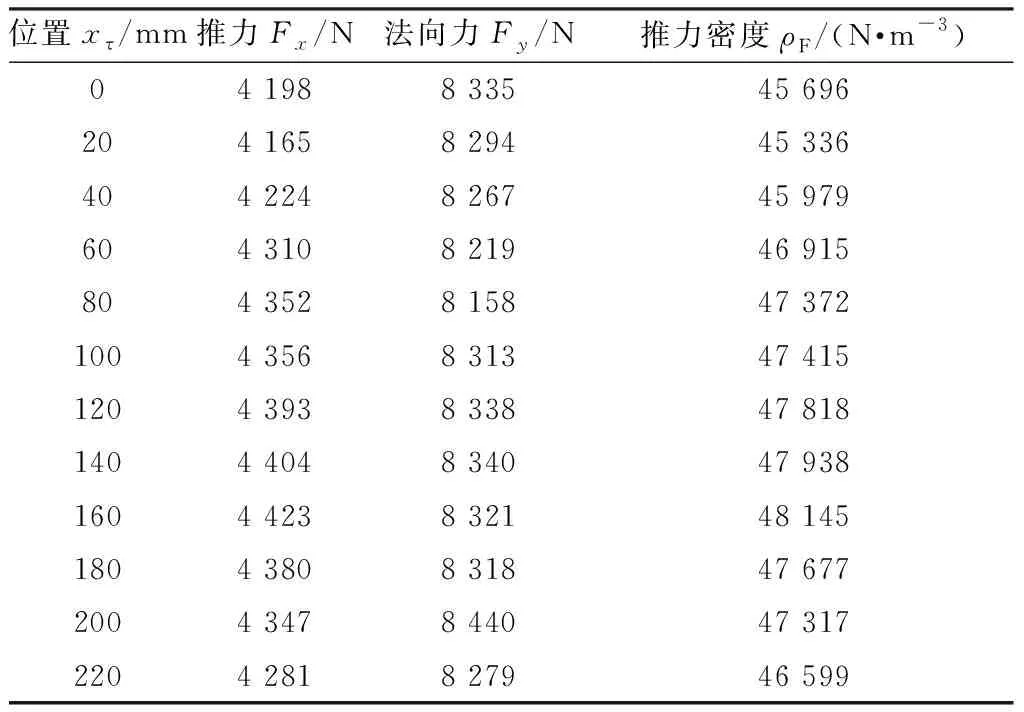
表4 不同位置下推力、法向力和推力密度

圖7 不同位置下的推力和法向力
由表4和圖7可知,LIM在不同位置下的推力波動較小,法向力和推力的比值約為2;電機推力密度大于45 000 N/m3,可提供的推力大于4 000 N,滿足軌道交通對電機動子推力大小的要求。
(2)電流頻率對電磁力的影響
當LIM位置不變、初級電流幅值為200 A時,不同初級電流頻率下穩定后的推力、法向力和推力密度如表5和圖8所示。
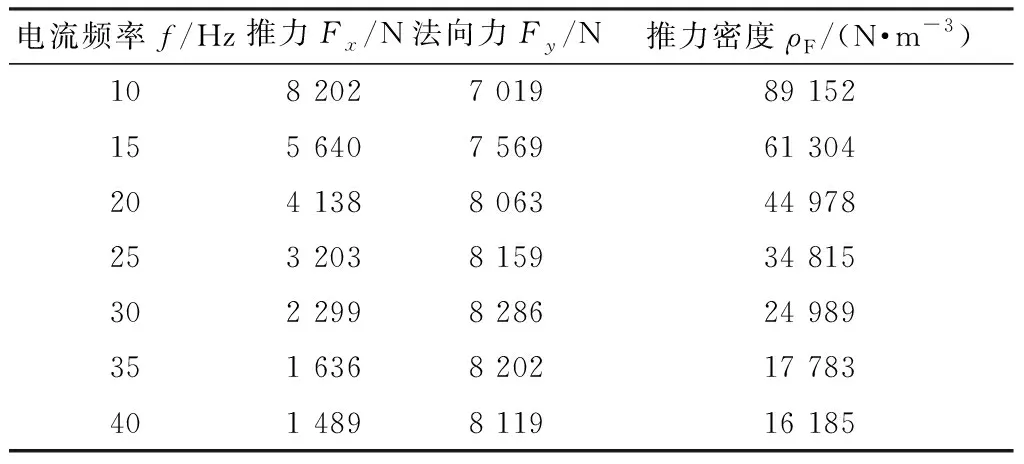
表5 不同電流頻率下的推力、法向力和推力密度
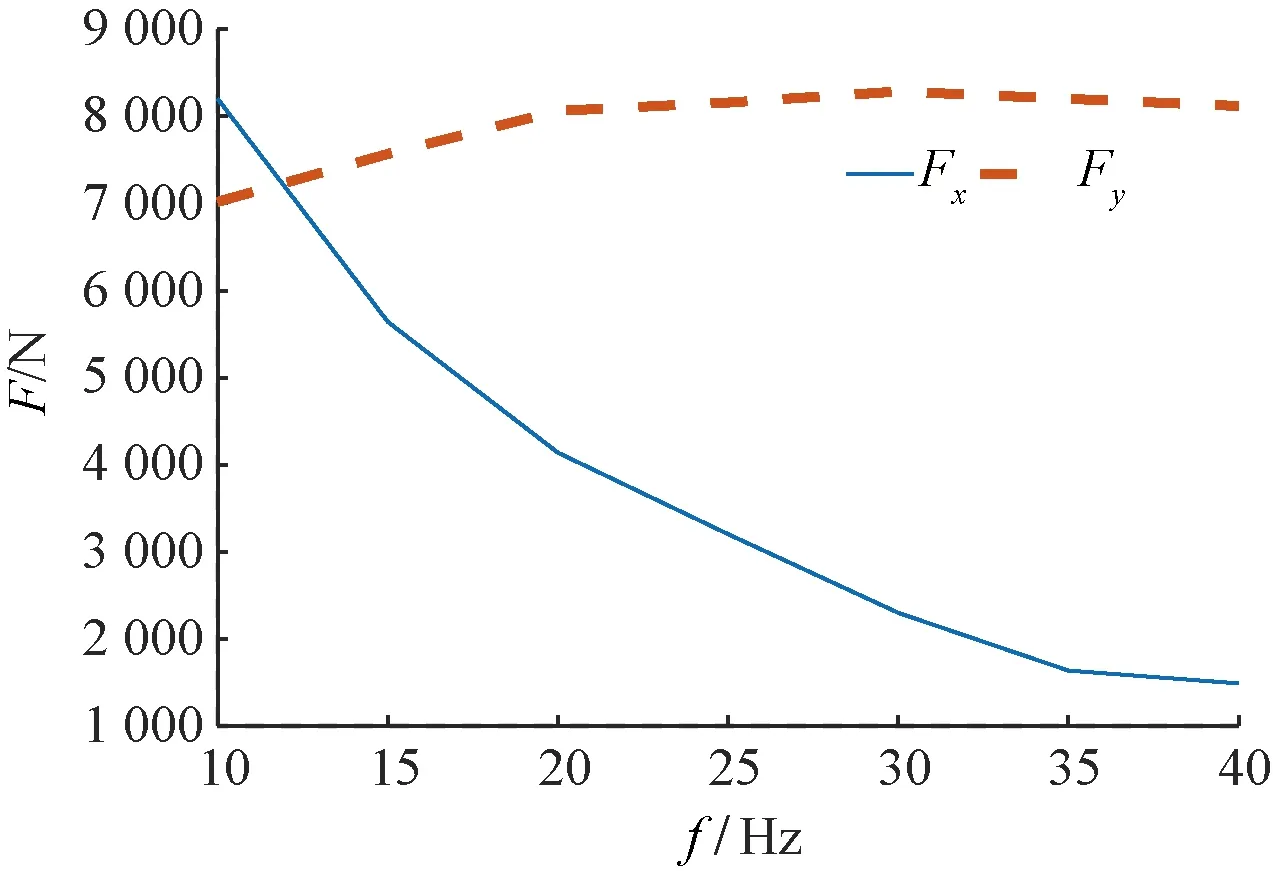
圖8 不同頻率下的推力和法向力
由表5和圖8可知,當頻率低于15 Hz時,法向力略小于推力,當頻率超過15 Hz時,法向力遠大于推力;推力和推力密度隨初級電流頻率增大而大幅減小,法向力隨初級電流頻率增大而小幅增大,因此,法向力與推力的比值也大幅增大。
(3)電流幅值對電磁力的影響
當LIM的位置不變、初級電流頻率為20 Hz時,不同電流下穩定后的推力、法向力和推力密度如表6和圖9所示。
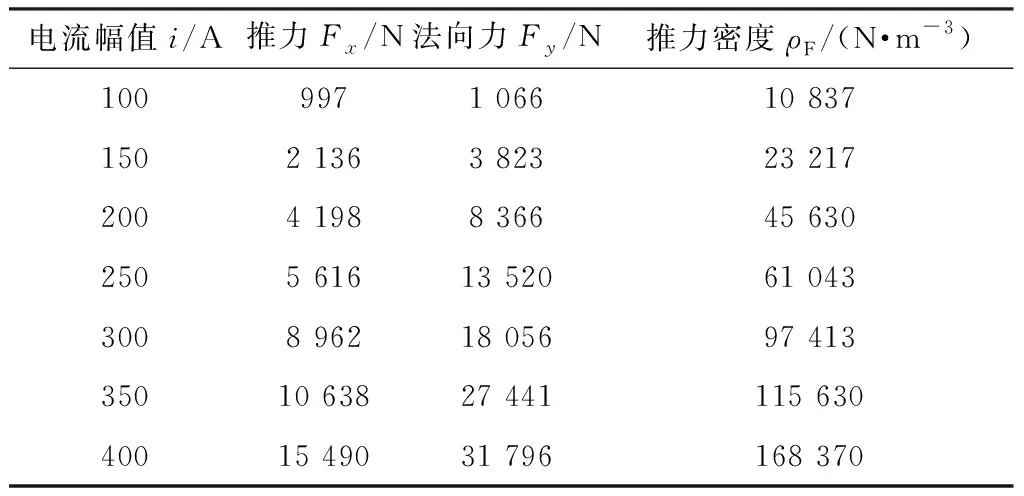
表6 不同電流下的推力、法向力和推力密度

圖9 不同電流下的推力和法向力
由表6和圖9可知,當初級電流幅值增大時,LIM提供的推力和法向力也會大幅增大,且呈線性變化趨勢;推力密度隨電流幅值增大呈線性增長趨勢。因此,在選擇初級電流頻率和幅值時,需要綜合考慮二者對推力和法向力的影響,還需要考慮繞組可允許通過的最大電流,避免電路故障。
3.2 LPMSM的電磁力特性分析
LPMSM的電機推力與通電的電流頻率無關,因此只研究位置和電流幅值對電磁力的影響。
(1)位置對電磁力的影響
當LPMSM繞組電流為200 A時,不同位置下的最大推力、法向力和推力密度如表7和圖10所示。
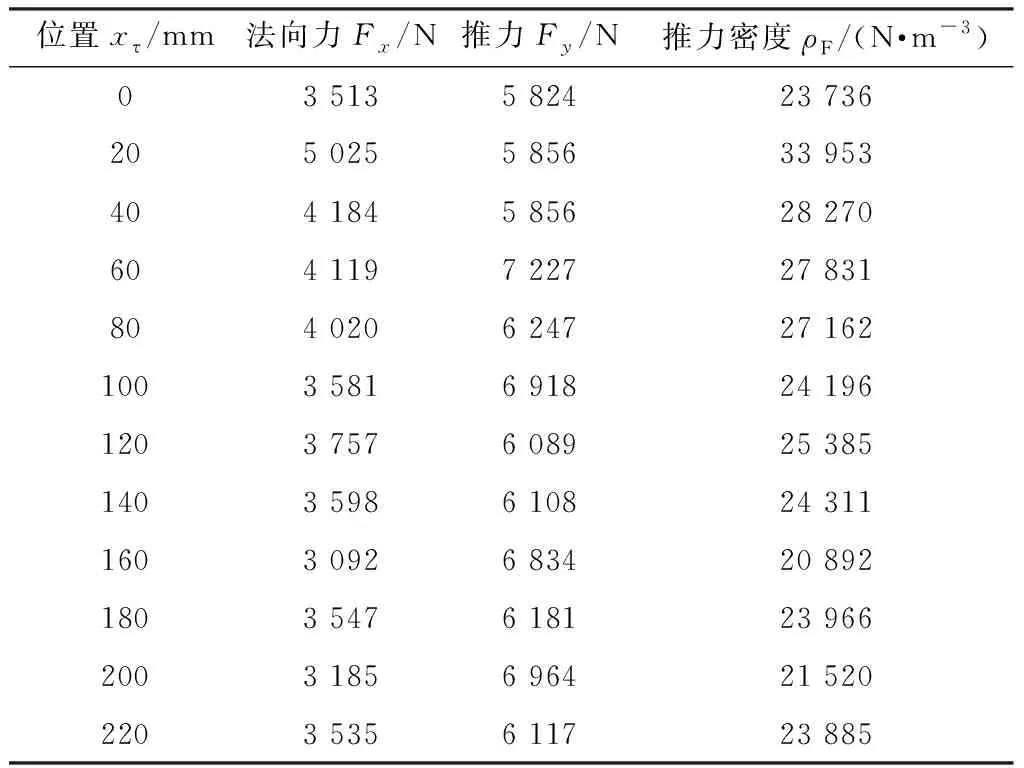
表7 不同位置下的推力、法向力和推力密度
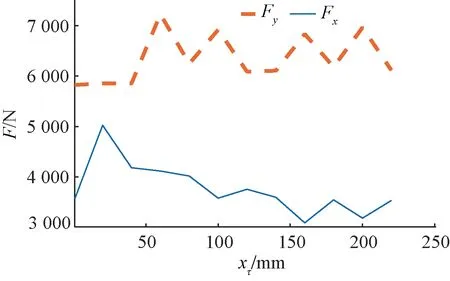
圖10 不同位置下的最大推力和法向力
由表7和圖10可知,LPMSM不同位置下的推力和法向力波動較大;電機氣隙為50 mm,在大氣隙下能提供的推力保持在3 000 N以上,與LIM在氣隙10 mm、相同電流下能提供的推力接近,表明LPMSM具有更高的效率和推力密度。
(2)電流幅值對電磁力的影響
當LPMSM位置保持不變時,不同電流下的最大推力、法向力和推力密度如表8和圖11所示。

表8 不同電流下的推力、法向力和推力密度
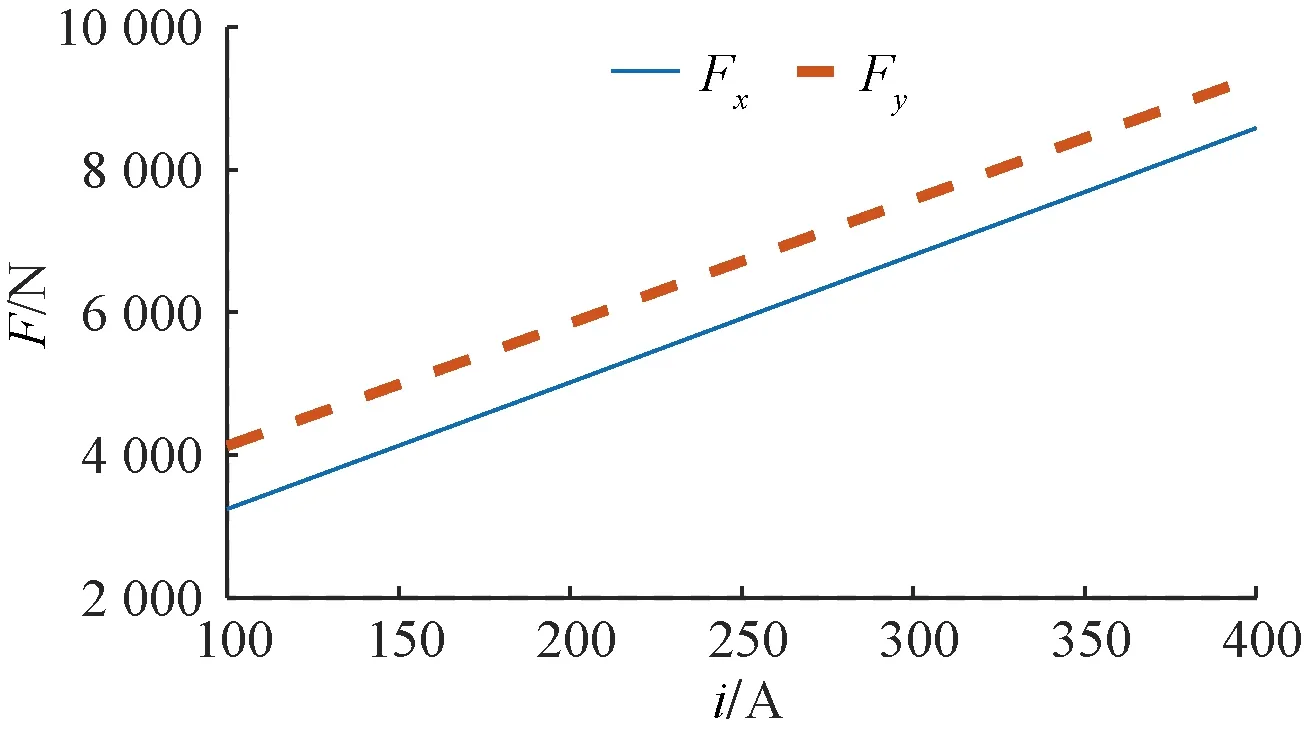
圖11 不同電流下的最大推力和法向力
由表8和圖11可知,當電流增大時,推力和法向力呈線性增大,但推力和法向力的比值減小。
3.3 LSRM電磁力特性分析
LSRM采用直流電流勵磁,只研究LSRM的電流幅值、氣隙和位置對電磁力的影響。
(1)氣隙對電磁力的影響
當LSRM的電流幅值為200 A時,不同氣隙下電機的最大推力、法向力和推力密度如表9和圖12所示。
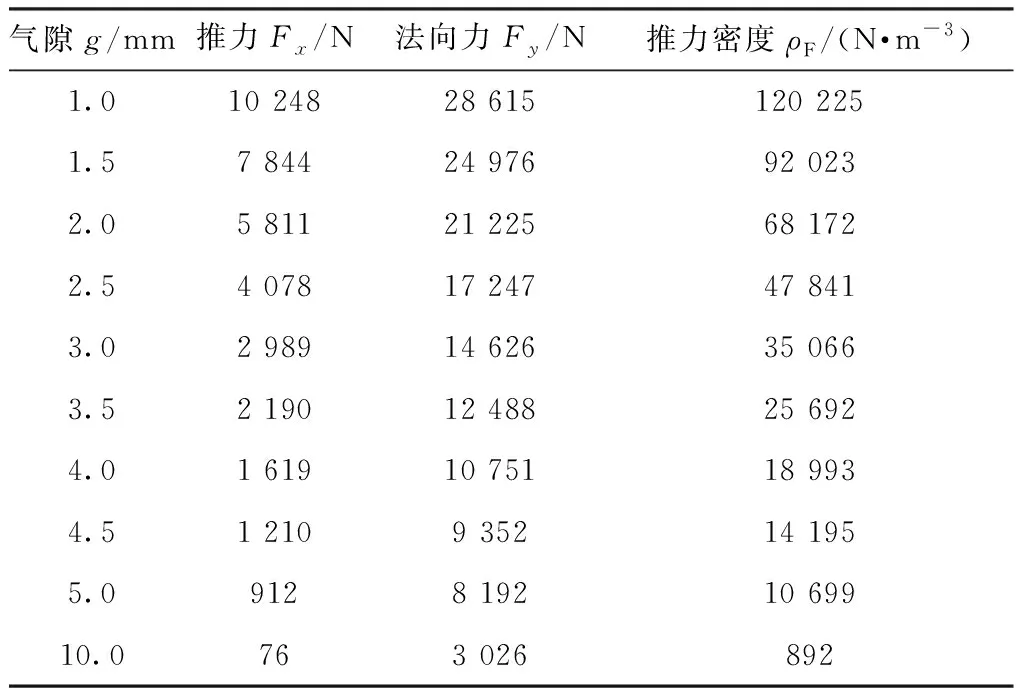
表9 不同氣隙下的推力、法向力和推力密度
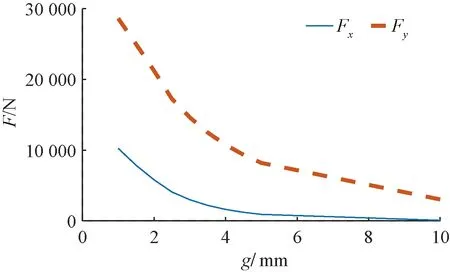
圖12 不同氣隙下的最大推力和法向力情況
由表9和圖12可知,當LSRM氣隙小于3 mm時,能提供大于4 000 N的推力,滿足軌道交通對動子推力大小的要求;當氣隙大于3 mm時,推力和法向力大幅減小,法向力與推力的比值增大;當氣隙增大到10 mm時,推力只有76 N。因此,仍需改進電機的結構或材料以增大大氣隙下的推力。
(2)電流幅值對電磁力的影響
當LSRM的氣隙為3 mm時,不同電流下最大推力、法向力和推力密度如表10和圖13所示。
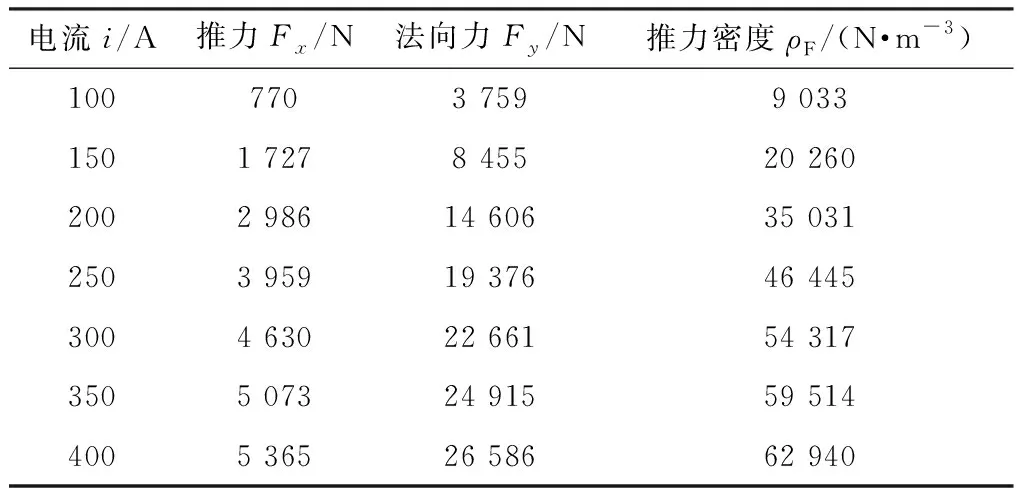
表10 不同電流下的推力、法向力和推力密度
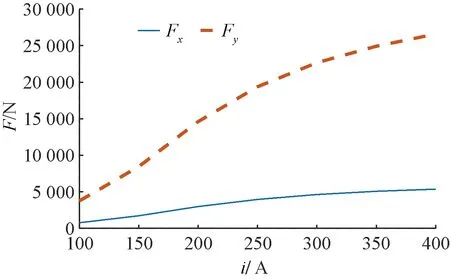
圖13 不同電流下的推力和法向力
由表10和圖13可知,當電流增大且磁場未達到飽和時,推力和法向力呈線性增大;當電流增大且磁場接近飽和時,推力隨電流增大而增大,但是增大幅度非常小。
(3)位置對電磁力的影響
當LSRM電流幅值為200 A,氣隙為2.5 mm時,不同位置下的推力、法向力和推力密度如表11和圖14所示。

表11 不同位置下的推力、法向力和推力密度
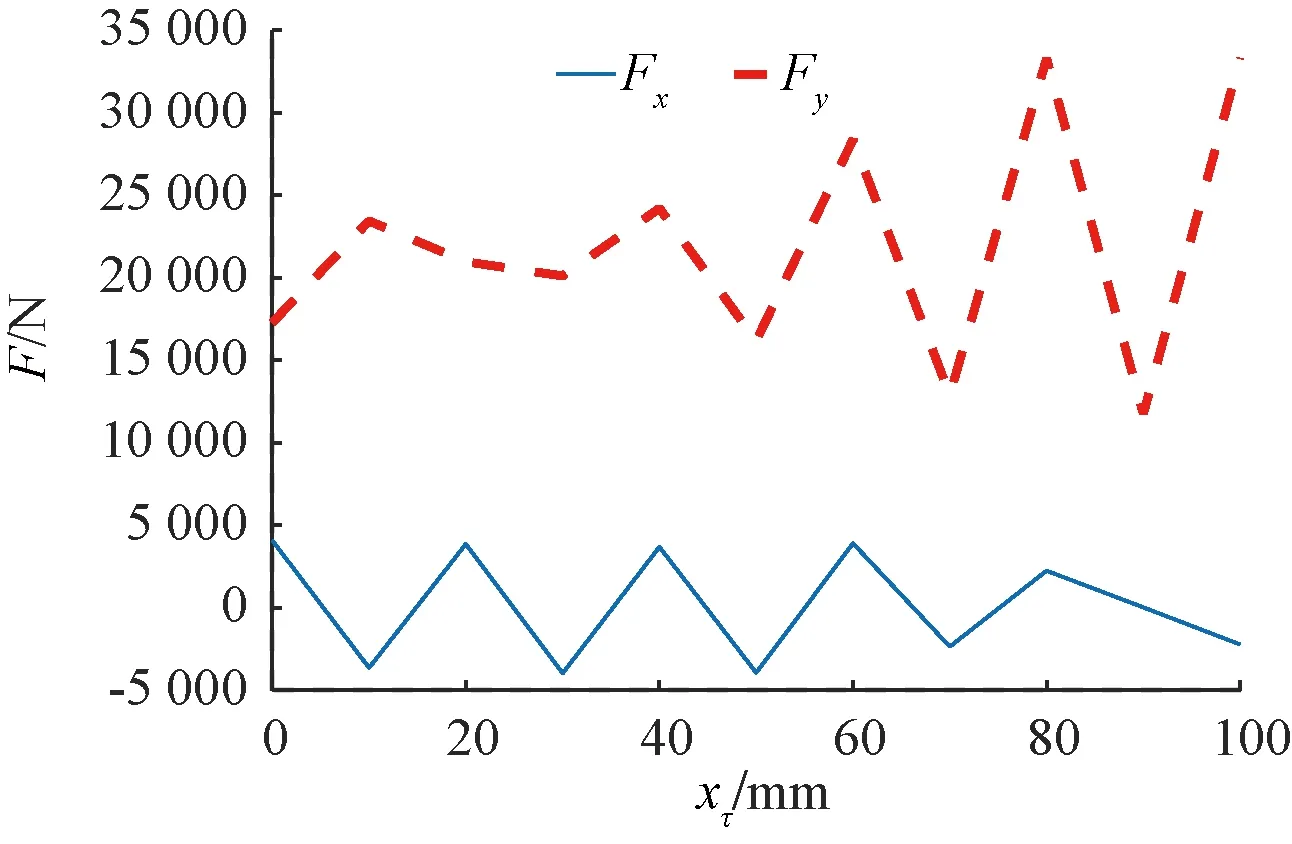
圖14 不同位置下的推力和法向力
由表11和圖14可知,LSRM不同位置下的推力和法向力波動較大,當動子與定子齒對齊和不對齊兩種情況的推力差距大,推力最大可達4 000 N,最小接近0,而法向力保持在10 000 N以上。需要建立合理的閉環系統和控制算法來控制電機,持續、穩定產生大推力。
4 結 語
本文深入分析了軌道交通用LIM、LPMSM與LRSM三類電機的電磁特性,通過分析結果可知:
(1)在200 A電流情況下,10 mm氣隙的LIM、50 mm氣隙的LPMSM、2.5 mm氣隙的LRSM能夠產生軌道交通所需要的4 000 N推力。此時,LIM的體積和氣隙分別是LRSM的1.08倍和4倍,LPMSM的體積和氣隙是LRSM的1.74倍和20倍。因此,LIM適用于十幾毫米氣隙需求的軌道交通,LPMSM適用于幾十毫米氣隙需求的軌道交通,LRSM適用于幾毫米氣隙需求的軌道交通;LRSM適用于對小體積牽引電機有需求的軌道交通。
(2)在產生軌道交通所需要的4 000 N推力情況下,LIM的轉差頻率為20 Hz、法向力與推力的比值為1.99,LPMSM法向力與推力的比值為1.16,LRSM法向力與推力比值為4.24。因此,LRSM具有較低的出力效率,LPMSM具有較高的出力效率;LRSM具有較大的法向力干擾,需要通過合理的控制策略抑制法向力干擾;LPMSM具有較小的法向力干擾,有利于實現列車的平穩運行。
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
