基于空間電容傳感器的馬鈴薯排種狀態監測系統研制
2021-12-30 00:31:54王關平劉小龍王成江孫麗萍
農業工程學報 2021年20期
關鍵詞:測量
朱 亮,王關平,孫 偉,張 華,劉小龍,馮 斌,王成江,孫麗萍
基于空間電容傳感器的馬鈴薯排種狀態監測系統研制
朱 亮1,王關平1※,孫 偉1,張 華1,劉小龍1,馮 斌1,王成江1,孫麗萍2
(1. 甘肅農業大學機電工程學院,蘭州 730070;2. 甘肅畜牧工程職業技術學院,武威 733006)
針對傳統光電式馬鈴薯排種監測系統因抗塵、抗振能力差所導致的可靠性偏低問題,該研究通過構建空間電容傳感器并基于排種過程獲取電容變化量信息進行排種狀態監測。該研究首先進行了理論推導,證明了通過最大凈電容變化量信號對馬鈴薯排種狀態判別的可行性;然后,在典型馬鈴薯播種機基礎上采用Maxwell完成了空間電容傳感器建模和電容值變化范圍確定;通過恒溫恒濕環境種薯運動模擬臺架試驗,獲得溫濕度影響回歸模型,使不同條件下的測量數據可以自由轉化。進一步研究發現,同一品種、不同大小種薯對應的最大凈電容變化量與其質量之間線性關系明顯,并提出一種基于空間電容傳感器測量種薯質量獲取排種狀態識別策略。基于該理論構建的臺架試驗表明,該系統空間電容測量誤差小于1%,種薯質量獲取誤差小于3%;試驗范圍內的漏播均可被準確判定;由于試驗種薯的不規則性較大,2.33%的正常單粒排種被誤判為重播,而2.78%的重播被誤判為正常,故系統排種狀態識別的準確率依然較高。該文所述方案可一次性完成正常、漏播及重播判斷,可為馬鈴薯排種監測提供參考。
傳感器;監測;空間電容;溫濕度;馬鈴薯;排種狀態
0 引 言
由于勺式排種器的成熟性和通用性,以及切塊種薯制備的經濟性和便利性,時至今日,基于勺式排種器、采用切塊薯種植的栽培模式依然是馬鈴薯機械化種植的主流形式[1-3]。然而,一方面,切塊種薯的流動性差、形態差異較大,導致種勺舀取困難,所致漏播[4-6],馬鈴薯切塊播種屬于超大籽粒種植,其排種間距較大,即使是單粒漏播,所造成的影響也非常顯著[7];另一方面,由于多取而導致的重播也時有發生,這易導致苗多爭肥、苗密株弱、病害增多、效益降低等[8]。中小型馬鈴薯播種機采用切塊薯種植的平均自然漏播率通常不低于5%[9-10],而重播導致的間接損失也不低于3%[11],因此,由于精確農業技術的落后,現有馬鈴薯播種環節的綜合先天性減產應不小于8%,這無疑是個巨大的數字,因為在國內,馬鈴薯已成為第四大主糧作物,對國家糧食安全意義重大。在精確農業已成為大勢所趨的時代背景下[12-14],采用先進技術進行排種監測并采取可行措施消減這一損失不僅可能,而且愈加迫切。
歐美馬鈴薯種植普遍采用大型機械[15-16],自然漏播率低,且馬鈴薯并非其主糧作物,因而該領域研究動力匱乏,既有成果主要局限于基本信息采集和報警指示等方面。國內該領域研究始于2011年前后。2012年,張曉東[17]提出了由紅外光電傳感器、單片機、步進電機三部分組成的機電式馬鈴薯播種器自動補償系統,但其漏播檢測方案較原始,可靠性較低,且由步進電機驅動盤式補種器補種的方案結構復雜、速度慢,但該研究開啟了本領域探索的大門。進一步,劉全威等[18]提出了一種基于AT90S2313單片機的紅外漏播檢測系統和曲柄連桿打擊補種機構組成的馬鈴薯漏播補償方案,該系統檢測技術有較大改進,硬件、軟件細節更為全面。以此為基礎,孫偉等[19]和王關平等[20]分別提出了磁鋼-霍爾傳感器觸發和磁鋼-干簧繼電器觸發紅外漏播檢測的新方案,有效解決了檢測時機、檢測速度、檢測可靠性等問題。之后,該團隊又提出了雙點監測信息統計與排種狀況決策新架構[21-22],使得系統反應更具超前性,克服了第一代檢測技術對傳感器安裝位置的束縛,其數據統計與決策結果的準確率不低于99.9%。但是,該系統仍然易受田間強塵、振動等外界因素的威脅,其在耐久性基礎上的可靠性依然有待提高;此外,由于其固有特性,難以對重播進行有效識別。樊婧婧[23]將機器視覺引入檢測系統,通過閾值分割及形態學運算實現了對重復取種的檢測,但因圖像處理運算量較大,導致其高速作業實時響應差,且相機更易受到強塵、振動、外界光線等干擾,難以在田間復雜工況及惡劣環境下普及推廣。因此,采用非光電的快速、簡易監測方案勢在必行,基于該理念的其他作物排種監測[24-27]成功應用案例,牛康等[28]提出了基于電容量檢測的馬鈴薯漏播決策方案。這一思路的優勢是檢測系統天然抗塵、抗振,但決策方法依然需要開展更為深入的基礎性研究,以進一步明確環境因素的具體影響,且電容量概念(尤其是pF級單位)對基層操作人員而言直觀性不佳;同時,該體系不具備重播識別功能,可進行進一步挖掘利用。
為此,本研究將首先通過ANSYS軟件分析空間傳感器的極板尺寸、極板間距、板間電容變化量等關鍵參數,然后通過電容振蕩電路和頻率測量方案,間接獲取空間電容測量值,并構建空間電容檢測試驗臺架,深入研究溫濕度對測量電容的影響程度、作用規律等,進而得出測量電容與種薯質量之間的關系,以期為大田環境下基于空間電容檢測的強適應性馬鈴薯排種信息獲取與漏、重播監測提供基礎數據,也為后期補償及消重執行機構的動作執行提供基礎信息支撐。
1 測量原理
由于種薯塊與空氣的介電常數[29-30]存在顯著差異,因此,當種薯通過由對置式電容傳感器極板所形成的檢測空間時,必然引起極板間等效介電常數的改變,進而引發該體系空間電容值的改變,獲得該變化量的具體數值,即可做出排種狀況判斷。該方案系統構建簡單,所需傳感器數量少,檢測點位置自由,傳感器基板(內表面覆銅箔作為電極)可采用一體化注塑成型或打印,空間對稱度高、抗振動性能優異。當忽略邊緣電場和極板厚度影響時,空間電容傳感器電容值(F)的計算公式為
式中ε為極板間介質的相對介電常數;0為真空介電常數,F/m;為極板有效正對面積,m2;為兩極板間距離,m。
非載種情況下的空載電容值0為
其中等效相對介電常數ε0為
式中ε為空氣相對介電常數;V為極板間空氣所占體積,m3;ε為種勺與鏈條組合體相對介電常數;V為極板間種勺及鏈條等所占體積,m3;為對置極板空間的總體積,m3。
切塊種薯通過極板空間時,極板間電容值1為
等效相對介電常數ε1為
式中ε為馬鈴薯相對介電常數;V為極板間馬鈴薯所占體積,m3。


式中1max為種勺攜載種薯經過空間電容傳感器過程中的電容最大值,F;0max為空種勺穿越空間電容傳感器過程中空間電容傳感器測量電容的最大值,F。
2 基于ANSYS的空間電容傳感器建模與分析
空間電容傳感器是測量系統的核心,其性能決定了測量結果的準確性。電容極板過大會使得基礎電容過高,種薯通過時空間電容值變化不明顯,將導致傳感器靈敏度降低;而電容極板過短,則易在勺鏈攜載種薯快速運動時因采樣頻率不夠而造成漏檢誤判的結果發生。
播種作業時,切塊種薯物理特征并非完全一致,但其切塊工藝可保證種薯最大直徑在30~40 mm,勺鏈式馬鈴薯排種器正常工作鏈速約為0.2~0.8 m/s,對種薯運行情況分析可得單個電容采樣時間內種勺運動位移L為
式中V為種勺運動線速度,m/s;F為系統電容采樣頻率,Hz。
依據香農采樣定理,每個完整種薯經過傳感器的時間應大于2倍的系統電容采樣時間,故極板長度L為
式中L為典型種薯寬度,本研究取30 mm[9-10]。
依據式(8)~(9),在系統采樣頻率為150 Hz情況下,初定極板高度為45 mm、寬度60 mm。
首先采用ANSYS對極板主要參數選擇的合理性進行驗證。假定靜電場中電介質常數恒定,傳感器銅質極板電介質各部分同性、均勻分布,場內電位滿足拉普拉斯方程、邊值構造問題。電極基本參數為:長60 mm,寬45 mm,電極厚度0.15 mm,極板材質選擇COPPER(銅)。極板襯底選擇丙烯腈-丁二烯-苯乙烯聚合物,相對介電常數為2;電容傳感器周邊選擇AIR(空氣)進行填充,相對介電常數為1.000 6;增加Potato材質的30 mm立方體模擬馬鈴薯在極板內的運行情況,其相對介電常數為13。給定仿真單元最大長度為0.5 mm,由ANSYS對仿真部分進行智能單元網格劃分。左右極板間施加激勵電壓1.65 V(與MAX038相匹配),使等效立方體馬鈴薯自極板下邊緣,沿極板間中軸線以步長0.1 mm向極板上邊沿運動,其運行過程三維示意圖見圖 1所示,該過程電容值的變化如圖2所示。
Maxwell仿真表明,在真空條件下,電極厚度為0.15 mm、電容極板大小為45 mm×60 mm時,種薯未進入空間電容傳感器時的空載電容0≈0.8 pF;負載時,馬鈴薯自下而上運行過程中,極板間電容變化量與種薯位移量基本呈線性關系,其最大電容值為馬鈴薯完全移入電容極板空間中心處,此時最大電容值1max≈1.15 pF;同時可見,種薯位移在0~15 mm段出現了尖峰,這是馬鈴薯與電容極板的邊沿效應所致。
由仿真數值可知,該過程的電容變化量(1max-0)約為0.35 pF,(1max-0)/max≈30%,(1max-0)/0≈ 44%,其變化率較為明顯,具備辨識是否有種薯通過的條件。作為可行性探索,本模型并未考慮種勺的體積、材料,也未考慮種勺所附著鏈條的結構、體積等細節。但通過該仿真可獲得足夠精確的電容極板尺寸,并可大致掌握該體系空間電容的變化區間(實際測量電容值由于其他介質材料的存在、測量線路分布電容的存在等會有所增大),這為后續空間電容檢測技術路線規劃、芯片選擇、標準數字電橋選擇等提供了必要參考。
基于上述結果,考慮到馬鈴薯排種器的空間形態和傳感器的高敏感度需求,由圖1所示極板形狀根據具體需要進行微調。電容傳感器骨架選用ABS材質經3D打印而成,為使極板更加貼合勺鏈種勺組合體,采用半徑100 mm的標準對極板進行彎曲,調整后極板間中心距仍為60 mm,具體結構如圖3所示。
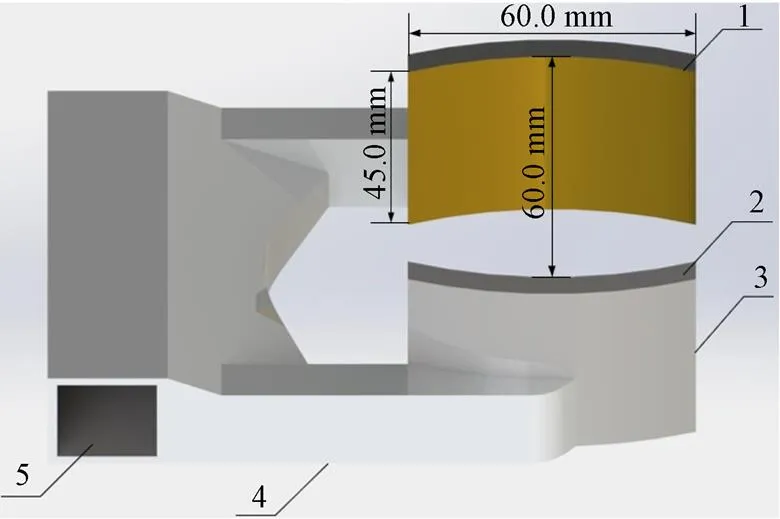
1.聚四氟乙烯 2.銅箔 3.極板支撐 4.傳感器骨架 5.傳感器固定孔
3 空間電容檢測試驗平臺
3.1 馬鈴薯運動模擬試驗臺
為測試空間電容測量系統的準確性與可靠性并進行后續研究,搭建了馬鈴薯運動模擬試驗臺,如圖4所示。試驗臺主要由上位機、高精度位移滑臺、伺服電機、伺服電機驅動器、種勺、PLC、屏蔽網、數字電橋及空間電容測量系統組成。其中,空間電容測量系統、高精度位移滑臺、伺服電機、種勺及被測種薯均放置于屏蔽網框架內,緊靠屏蔽網框架外側固定,便于和其他裝置一同移動,同時,將伺服電機外殼與框架相連做接地處理,以屏蔽電磁干擾;數字電橋則用于提供空間電容的標準值,而上位機則通過控制PLC進一步控制伺服系統的動作,以模擬實際種薯相對于傳感器的位置變化。
3.2 空間電容測量系統
空間電容測量系統由空間電容傳感器、前端信號處理電路、溫濕度傳感器、人機交互通道、通訊接口、CPU(GD32F407)以及上位機構成。空間電容傳感器通過屏蔽線連接至前端信號處理電路,經由/轉換電路(以MAX038為核心)和方波整形電路(以TLV3501為核心)后連接至CPU,CPU通過頻率測量后,進一步完成/c轉換及后續處理。此外,為了便于系統在密閉環境下批量采集數據,上位機與空間電容測量系統之間采用RS485進行數據通信。具體的空間電容測量系統構建方案見圖 4a,主要前端信號處理電路如圖4b所示。極板電纜接入MAX038CWP的COSC引腳和GND之間;電流調節端REF引腳接入4.7 kΩ電阻進行輸出頻率配置,將FADJ引腳通過12 kΩ電阻接地禁止頻率微調,輸出信號頻率為
式中R為電流調節器輸入電阻,本研究取值4.7 kΩ;1為Max038CWP芯片所采用輸入電容,本研究取值范圍0.2~4 pF。
4 性能試驗
4.1 系統有效性試驗
為驗證空間電容測量系統獲取電容信息的準確性,恒溫恒濕箱中,在溫度15℃、相對濕度50%RH條件下,以數字電橋測量值作為標準值(精度0.02%),以空間電容測量系統所獲數據作為測量值進行對比試驗,計算相對誤差。分別對空載及20、30、40mm立方種薯(隴薯7號,含水率70%~75%)負載情況下進行試驗,每組試驗進行3次,測量結果如表1所示。
結果表明,系統的檢測誤差<1%,誤差原因在于檢測系統采用測頻法獲取電容值,所用無源晶振存在一定的頻率擺動。該系統的使用目標是漏、重播判斷,其決策依據對電容本身的測量精度要求不是很高,因此,本文所設計的空間電容測量系統可以滿足需要。
4.2 溫濕度影響試驗
由于不同溫濕度下的空氣相對介電常數存在差異,因而環境溫濕度有可能對空間電容測量結果造成影響。為此,分別開展溫度和相對濕度變化對空間電容測量結果影響的試驗,測試樣品為隴薯7號30 mm立方體。試驗前,將樣品置于電容極板中央位置,直接測得空間電容最大值。
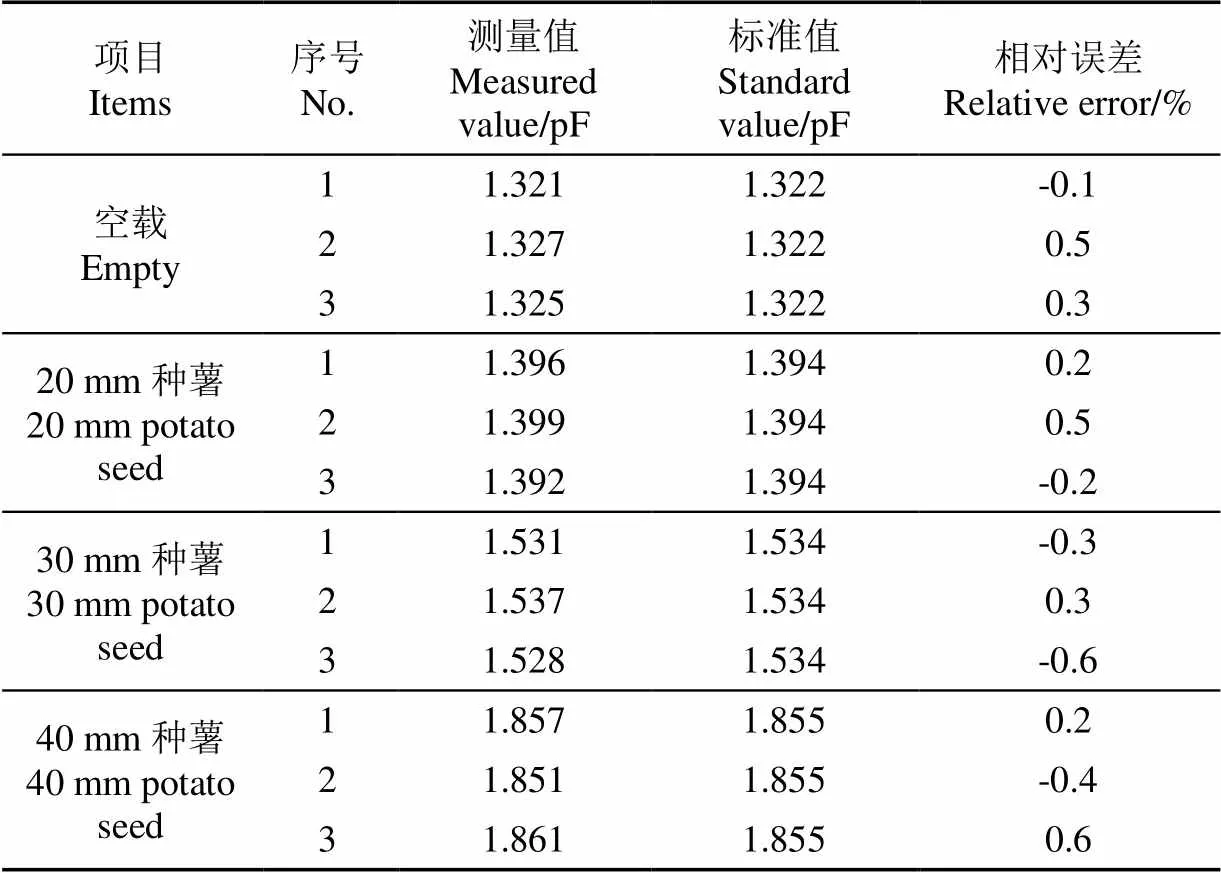
表1 系統檢測有效性試驗結果
首先將已準備好的試驗平臺放入恒溫恒濕控制箱內,啟動測量系統,溫度設定為10 ℃、保持濕度為50%RH,靜置試驗平臺20 min,待數據穩定后進行檢測。以5 ℃為梯度升高設定溫度,直至控制箱內溫度升至55 ℃。每次調整后,待箱內溫度變化指示穩定5 min,讀取數字電橋示數。測試結果如圖5所示。
由圖5可知,濕度為50%RH條件下,當溫度由10 ℃逐漸升高至55 ℃時,空載種勺空間電容傳感器的測量電容值由1.322 pF降低至1.315 pF,呈略微下降的趨勢;而種勺載種情況下,則由1.542 pF降低至1.535 pF,下降的趨勢與速度和空載時幾乎相同,其他濕度條件下電容變化的趨勢與基本相同。故進行相對濕度變化對空間電容測量數值的影響試驗時,保持溫度為15℃,濕度在20%RH~90%RH之間進行調整。調整恒溫恒濕箱,將溫度設定為15 ℃,濕度初值設定為20%RH,靜置試驗平臺20 min,之后以5%RH為梯度升高箱內濕度,直至達到90%RH。每次調整后,穩定5 min,記錄測量結果,試驗結果如圖6所示。
上述研究結果表明,溫度及濕度不同,空間電容測量值不同。因此,為了抵抗環境變化所造成的采樣數值波動,需要定義一個標準狀態,據相關文獻和西北半干旱地區的作業實際情況[31],本研究定義溫度15 ℃、濕度50%RH為馬鈴薯播種作業的標準狀態。具體環境溫濕度與標準狀態存在差異,應將相關數據折算校正為標準狀態。

式中為溫度影響斜率,由圖5可知,從10 ℃逐漸升高至55 ℃時,同一條件下測量電容的值均減小約0.07 pF,故=0.07/(55-40)=1.56×10-4pF/℃;為測試環境溫度,℃。
而后對環境濕度進行校正,50%RH條件下的其他實驗數據見圖7所示,根據不同溫度下的環境濕度與空間測量電容值關系曲線會發現,不同曲線之間的走向極為相似,因而可以采用15 ℃條件下不同濕度條件下電容實測值來繪制一條代表性曲線,而后通過偏移得到其他溫度下的校正曲線,曲線表達式見式(12),該模型的決定系數為0.996 9。
基于(12)式,濕度影響的校正因子可表達為

4.3 種薯質量標定
由圖8可知,本文所述標準環境下的種薯凈電容變化量與種薯質量之間均呈現線性關系,5組擬合方程決定系數分別為0.998 2、0.997 1、0.998 8、0.998 1以及0.998 6。因此通過測量空間電容傳感器的電容變化量最大值,可得到種薯質量測量值的計算公式:
進而依據所設定種薯質量閾值推斷出是否有漏、重播事件發生,系統應用方案見圖9所示。
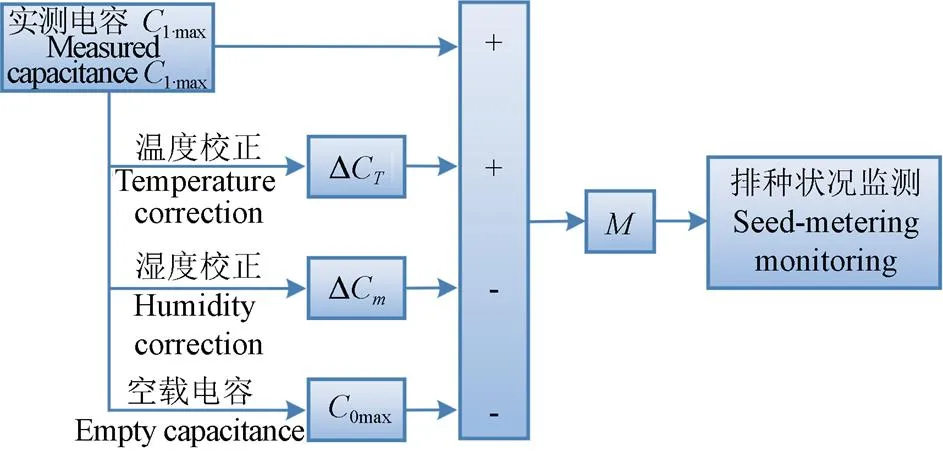
注:CT為空間電容傳感器溫度校正函數;Cm為空間電容傳感器濕度校正函數;C0max為當前環境下空間電容傳感器最大空載電容,F;M為經過校正計算的種薯質量,g。
5 驗證試驗
不同環境及種薯質量條件下檢測系統準確性試驗表明,圖9所示系統應用方案所獲種薯質量的相對誤差<3%(由圖8原始數據得出)。雖然這一誤差并不小,但仍不足以對漏、重播判斷造成實質性影響。因為典型種薯的質量約為40~50 g,所以,漏、重播判定依據可以按表2執行。為驗證基于電容變化信息種薯質量獲取的馬鈴薯排種狀態監測方案的可靠性,搭建如圖10所示試驗臺架。
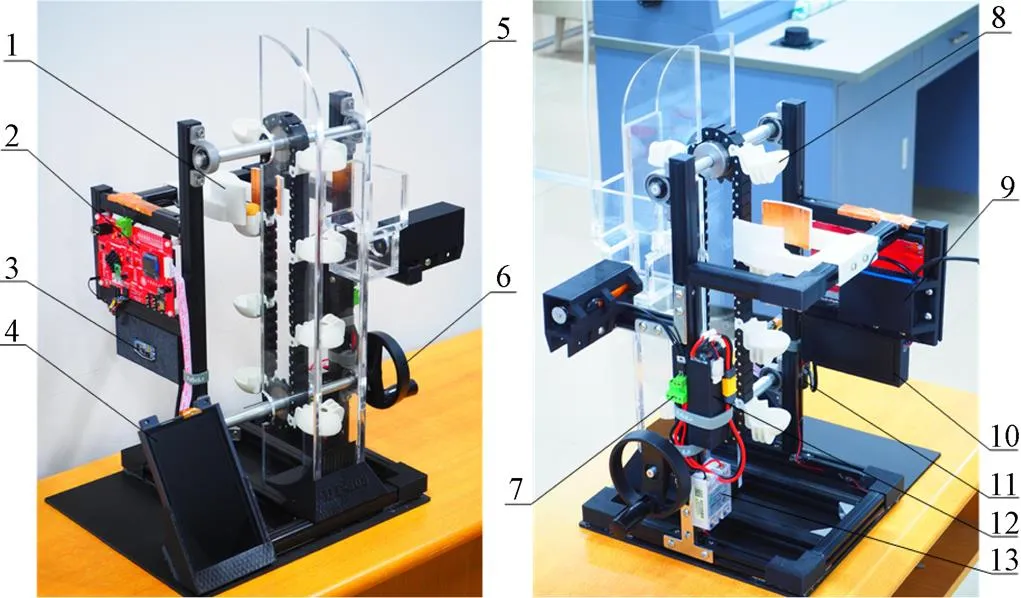
1.空間電容傳感器 2.控制板 3.RS485通信轉換模塊 4.顯示屏 5.亞克力護種槽 6.動力手柄 7.慢速熔斷器 8.種勺 9.控制系統電池(12V) 10.電機驅動器 11.光柵編碼器 12.漏播補償動力電池 13.直流固態繼電器
試驗臺架主要由空間電容傳感器、控制板、顯示屏、勺鏈式排種系統及動力手柄組成。控制板與圖 4a所示空間電容測量系統相同,用于空間電容值實時測量、排種狀態判斷及人機交互等;而顯示屏則能夠顯示實時電容檢測值、種薯質量、排種狀態判斷結果和其他統計數據。
依據GB18133-2012制定表2所示漏重播標準,據此可知,漏、重播之間的標準差距達50 g,因而漏、重播能被準確識別的可能性較高。為此,準備不同品種的大(65~90 g)、中(45~65 g)、小(20~45 g)種薯各20個(含水率70%~75%)。操作試驗臺架動力手柄,帶動勺鏈攜載種薯自下而上通過空間電容傳感器(線速度0.2~0.8 m/s),記錄顯示屏輸出的相關數據完成試驗。

表2 基于種薯質量信號的漏重播判定準則
注:為品種調節系數,本文取值在1.00~1.05之間,基準數值對應品種為隴薯7號。
Note:is the variety regulation coefficient,the value in this paper is between 1.00 and 1.05, the corresponding variety of the benchmark value is Longshu 7
為了充分測試本馬鈴薯排種狀態監測系統的性能,試驗分為2個批次進行。第一批次只進行正常排種和漏播判斷,每個選定品種分別按照上述質量分類的大、中、小(分別標記為1、2、3)順序進行。其中,正常排種測試時,每個取種勺中隨機放置對應類別種薯1粒,而漏播測試則只要使所有取種勺空置即可,各進行20次測試,試驗數據見表3所示。
第二批次只進行重播判斷,不同組合只在同一品種之間進行,每個取種勺均放置2粒種薯。按照本研究準備的試品規格,1+1和1+2組合造成電容響應遠大于所劃定漏播閾值因而可被可靠地被判斷為重播;所以只考慮1+3、2+3、3+3三種組合的試驗結果。這3種組合形式上全部為重播,但由于組合后的總質量及測量存在客觀誤差,因而其存在理論上被判定為正常排種或漏播的可能性,結果見表4所示。
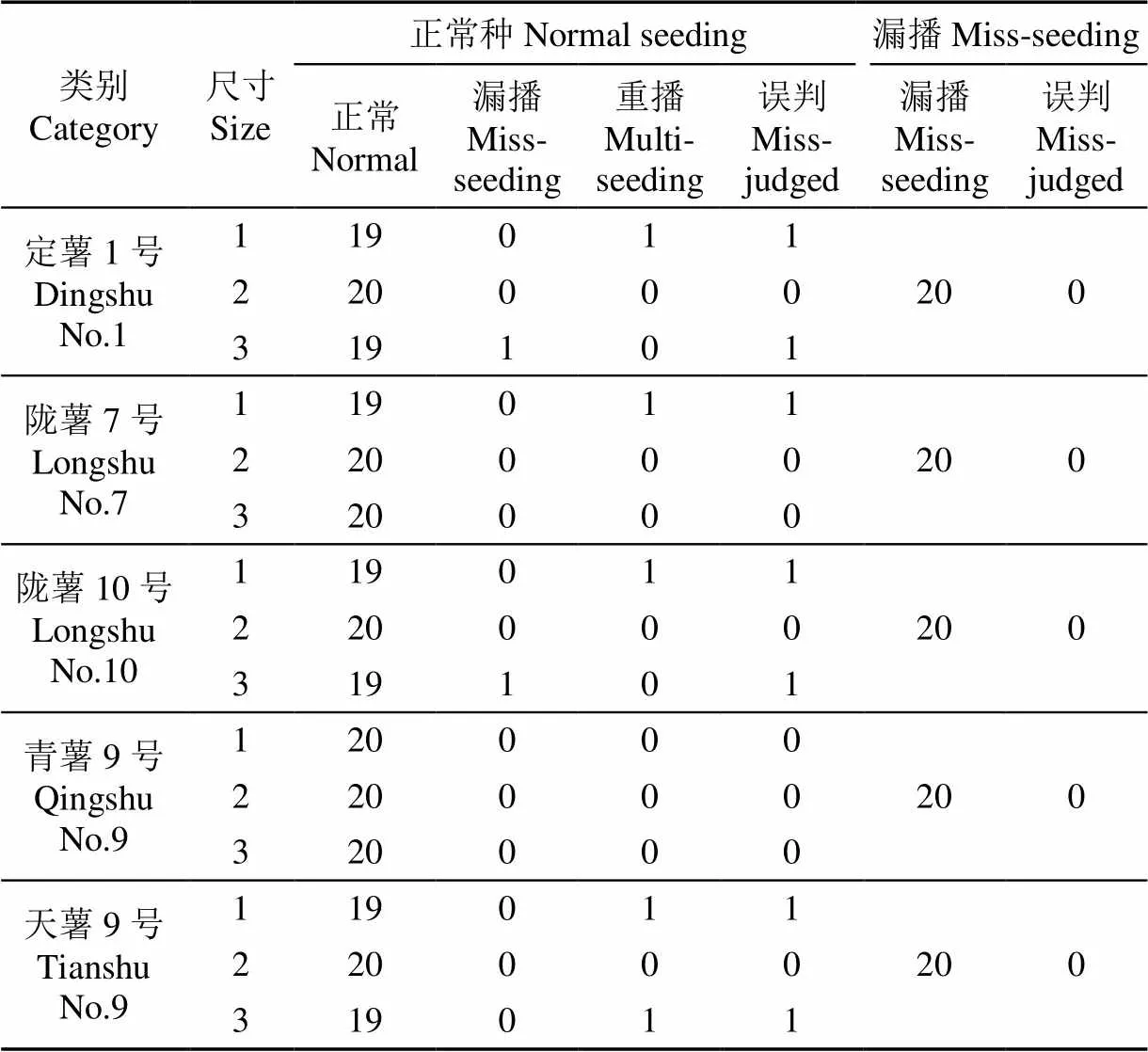
表3 正常排種與漏播試驗結果
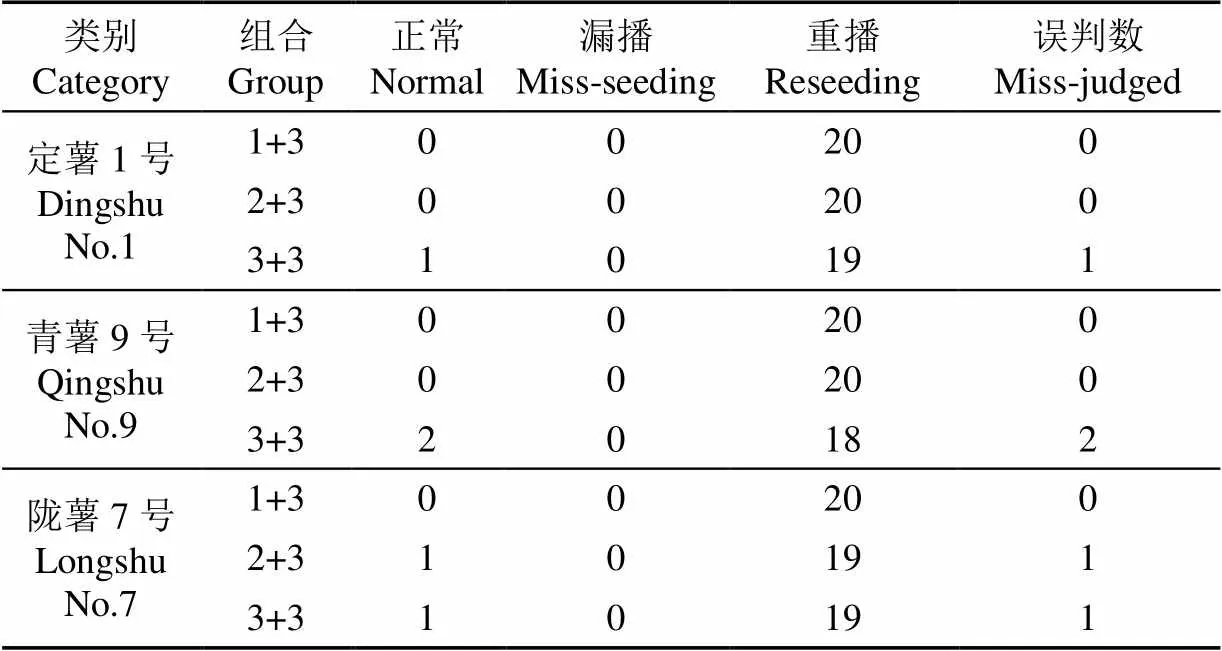
表4 重播試驗結果
表3結果表明,本試驗測量范圍內,各品種中等大小的種薯均能正確識別;而大種薯存在被判定為重播的可能性,小種薯則存在被判定為漏播的可能性。在300次測試中,共出現了7次誤判,占比為2.33%;而漏播試驗相對簡單,對于不同品種,其種勺均不置種,100次測試中,雖然由于采樣誤差得到的種薯質量結果有正有負,但其絕對值都較小(最多不超過3 g),并未觸發誤判。
表4結果表明,未出現漏播現象,其原因為2粒種薯的總質量均未低于漏播標準。然而,在180次測試中,共出現了5次正常排種誤判,占比為2.78%。誤判原因在于“小+小”組合的實際總質量只比重播質量稍大,而由于測量誤差卻顯示為該組合質量小于重播質量,因而誤將重播判定為正常排種。
6 結 論
本研究提出了利用種薯通過對置極板空間傳感器過程中電容的凈變化量來感知種勺中切塊種薯的狀態,由此獲得排種信息,主要研究結論如下:
1)基于ANSYS軟件完成了較為精準的空間建模,確定了電容極板尺寸,初步驗證了利用其進行馬鈴薯排種狀態監測的可行性。
2)提出了以GD32F407為CPU、以MAX038為核心轉換元件的空間電容測量系統構建方案。在此基礎上,設計了以PLC控制器為核心的馬鈴薯運動模擬試驗臺。定義了溫度15 ℃、濕度50%RH的標準狀態,并推導了測量過程中因種薯通過電容極板空間而引起的電容變化量計算公式,提出了基于空間電容測量值及種薯質量的馬鈴薯排種監測系統應用方案。
3)臺架試驗表明:空間電容測量誤差在1%以內,種薯質量測量誤差小于3%。試驗范圍內未見漏播誤判,正常單粒播種被誤判為重播的概率為2.33%,而2.78%的重播被誤判為正常播種。該方案能夠一次性完成正常、漏播及重播的判斷,誤判主要發生在單粒種薯太大及雙粒種薯太小的條件下,屬于極端現象。
[1] 王希英. 雙列交錯勺帶式馬鈴薯精量排種器的設計與試驗研究[D]. 哈爾濱:東北農業大學,2016.
Wang Xiying. Design and Experimental Research on Double-row Criss-cross Spoon-belt Potato Precision Seed Metering Device[D]. Harbin: Northeast Agricultural University, 2016. (in Chinese with English abstract)
[2] Ebrahem I Z , Ayman A E , Guidetti R , A new small potato planter for Egyptian agriculture[J]. Journal of Agricultural Engineering, 2011, 3(3), 7-13.
[3] 王相友,祝珊,李學強,等. 定向排列縱橫切分馬鈴薯種薯切塊機設計與試驗[J]. 農業機械學報,2020,51(6):341-352.
Wang Xiangyou, Zhu Shan, Li Xueqiang, et al. Design and experiment of directional arrangement vertical and horizontal cutting of seed potato cutter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(6): 341-352. (in Chinese with English abstract)
[4] 楊浩,劉小龍,王關平,等. 馬鈴薯精密播種技術的研究現狀及進展[J]. 林業機械與木工設備,2020,48(5):15-18.
Yang Hao, Liu Xiaolong, Wang Guanping, et al. Research status and progress of potato precision sowing technology[J]. Forestry Machinery & Woodworking Equipment, 2020, 48(5): 15-18. (in Chinese with English abstract)
[5] 劉文政,何進,李學強,等. 馬鈴薯播種機具研究進展[J]. 農機化研究,2018,40(4):7-13.
Liu Wenzheng, He Jin, Li Xueqiang, et al. Research progress of potato planter[J]. Journal of Agricultural Mechanization Research, 2018, 40(4): 7-13. (in Chinese with English abstract)
[6] 呂金慶,田忠恩,楊穎,等. 馬鈴薯機械發展現狀、存在問題及發展趨勢[J]. 農機化研究,2015,37(12):258-263.
Lü Jinqing, Tian Zhong’en, Yang Ying, et al. The development situation, existing problems and development trend of potato machinery[J]. Journal of Agricultural Mechanization Research, 2015, 37(12): 258-263. (in Chinese with English abstract)
[7] 朱瑞祥,葛世強,翟長遠,等. 大籽粒作物漏播自補種裝置設計與試驗[J]. 農業工程學報,2014,30(21):1-8.
Zhu Ruixiang, Ge Shiqiang, Zhai Changyuan, et al. Design and experiment of automatic reseeding device for miss-seeding of crops with large grain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(21): 1-8. (in Chinese with English abstract)
[8] 盧延芳. 馬鈴薯播種機智能控制系統研究[D]. 淄博:山東理工大學,2016.
Lu Yanfang. Study on Intelligent Control System for Potato Seeder[D]. Zibo: Shandong University of Technology, 2016. (in Chinese with English abstract)
[9] 楊浩,王關平,孫偉,等. 一種播補一體化新型馬鈴薯播種機的設計與試驗[J]. 干旱地區農業研究,2020,38(6):260-268.
Yang Hao, Wang Guanping, Sun Wei, et al. Design and test of a new type of potato seeder with integrated sowing and compensating[J]. Agricultural Research in the Arid Areas, 2020, 38(60): 260-268. (in Chinese with English abstract)
[10] 孫偉,劉小龍,張華,等. 馬鈴薯施肥播種起壟全膜覆蓋種行覆土一體機設計[J]. 農業工程學報,2017,33(20):14-22.
Sun Wei, Liu Xiaolong, et al. Design of potato casingsoil planter in all-in-one machine combined with fertilizing, sowing, ridging, complete film mulching and planting line covering[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(20): 14-22. (in Chinese with English abstract)
[11] 呂金慶,衣淑娟,陶桂香,等. 馬鈴薯氣力精量播種機設計與試驗[J]. 農業工程學報,2018,34(10):16-24.
Lü Jinqing, Yi Shujuan, Tao Guixiang, et al. Design and experiment of precision air-suction type planter for potato[J]. Transactions of the Chinese Society of Agricult-ural Engineering (Transactions of the CSAE), 2018, 34(10): 16-24. (in Chinese with English abstract)
[12] Leemans V, Destain M F, A computer-vision based precision seed drill guidance assistance[J]. Computers and Electronics in Agriculture, 2007, 59(1-2), 1-12.
[13] H?rbe T A N, Amado T J C, Ferreira A O ,et al. Optimization of corn plant population according to management zones in Southern Brazil[J]. Precision Agriculture, 2013, 14(4), 450-465.
[14] Samseemoung G, Soni P, Jayasuriya H P W, et al. Application of low altitude remote sensing (LARS) platform for monitoring crop growth and weed infestation in a soybean plantation[J]. Precision Agriculture, 2012, 13(6), 611-627.
[15] 李紫輝,溫信宇,呂金慶,等. 馬鈴薯種植機械化關鍵技術與裝備研究進展分析與展望[J]. 農業機械學報,2019,50(3):1-16.
Li Zihui, Wen Xinyu, Lv Jinqing, et al. Analysis and prospect of research progress on key technologies and equipments of mechanization of potato planting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(3): 1-16. (in Chinese with English abstract)
[16] 王彩英,李平. 馬鈴薯播種機排種機械化種植技術研究[J]. 農機化研究,2017,39(10):141-143.
Wang Caiying, Li Ping. Study on mechanized planting technology of potato planter[J]. Journal of Agricultural Mechanization Research, 2017, 39(10): 141-143. (in Chinese with English abstract)
[17] 張曉東. 馬鈴薯播種機自動監測補償系統設計[D]. 蘭州:甘肅農業大學,2012.
Zhang Xiaodong. Design of Automatic Monitoring and Compensation System for Potato Planter[D]. Lanzhou:Gansu Agricultural University, 2012. (in Chinese with English abstract)
[18] 劉全威,吳建民,王蒂,等. 2CM-2型馬鈴薯播種機漏播補償系統的設計與研究[J]. 干旱地區農業研究,2013,31(3):260-266.
Liu Quanwei, Wu Jianmin, Wang Di, et al. Design and test of a microcomputer-controlled loss sowing compen-sation system for 2CM-2 potato seeder[J]. Agricultural Research in the Arid Areas, 2013, 31(3): 260-266. (in Chinese with English abstract)
[19] 孫偉,王關平,吳建民. 勺鏈式馬鈴薯排種器漏播檢測與補種系統的設計與試驗[J]. 農業工程學報,2016,32(11):8-15.
Sun Wei, Wang Guanping, Wu Jianmin. Design and experiment on loss sowing testing and compensation system of spoon-chain potato metering device[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(11): 8-15. (in Chinese with English abstract)
[20] 王關平,孫偉. 一種馬鈴薯漏播檢測及補償裝置的研制[J]. 農業現代化研究,2016,37(5):1008-1014.
Wang Guanping, Sun Wei. Development of a kind of potato loss sowing detection and compensation device[J]. Research of Agricultural Modernization, 2016, 37(5): 1008-1014. (in Chinese with English abstract)
[21] Wang G P, Sun W, Chen L D, et al. Realization of an integrated seeding and compensating potato planter based on one-way clutch[J]. International Journal of Agricultural and Biological Engineering, 2020, 13(3): 79-87.
[22] Wang G P, Sun W, Zhang H, et al. Research on a kind of seeding-monitoring and compensating control system for potato planter without additional seed-metering channel[J]. Computers and Electronics in Agriculture, 2020, 177: 105681.
[23] 樊婧婧. 基于圖像處理的馬鈴薯播種機研究[D]. 西安:長安大學,2018.
Fan Jingjing. Research on Potato Seeder Based on Image Processing[D]. Xian: Chang’an University, 2018. (in Chinese with English abstract)
[24] 鄧麗莉,桑勝波,張文棟,等. 基于Pcap01芯片的高精度微電容檢測系統設計[J]. 傳感技術學報,2013,26(8):1045-1049.
Deng Lili, Sang Shengbo, Zhang Wendong, et al. Design of high-precision micro-capacitance detection system based on Pcap01[J]. Chinese Journal of Sensor and Actuators, 2013, 26(8): 1045-1049. (in Chinese with English abstract)
[25] 楊道業,許傳龍,周賓,等. 基于單檢測通道的電容層析成像系統[J]. 儀器儀表學報,2010,31(1):132-136.
Yang Daoye, Xu Chuanlong, Zhou Bin, et al. Electrical capacitance tomography system based on single measurement channel[J]. Chinese Journal of Scientific Instrument, 2010, 31(1): 132-136. (in Chinese with English abstract)
[26] 趙蕾,張文棟,何常德,等. 微電容檢測電路的設計和噪聲分析[J]. 儀表技術與傳感器,2016(12):157-160.
Zhao Lei, Zhang Wendong, He Changde, et al. Design and noise analysis of weak capacitance detection circuit[J]. Instrument Technique and Sensor, 2016(12): 157-160. (in Chinese with English abstract)
[27] 周利明,張小超,苑嚴偉. 小麥播種機電容式排種量傳感器設計[J]. 農業工程學報,2010,26(10):99-103.
Zhou Liming, Zhang Xiaochao, Yuan Yanwei. Design of capacitance seed rate sensor of wheat planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(10): 99-103. (in Chinese with English abstract)
[28] 牛康,周利明,苑嚴偉,等. 勺鏈式馬鈴薯排種器自補種系統設計與試驗[J]. 農業機械學報,2016,47(S1):76-83.
Niu Kang, Zhou Liming, Yuan Yanwei, et al. Design and experiment on automatic compensation system of spoon-chain potato metering device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(S1): 76-83. (in Chinese with English abstract)
[29] 周利明,李樹君,張小超,等. 基于電容法的棉管籽棉質量流量檢測[J]. 農業機械學報,2014,45(6):47-52.
Zhou Liming, Li Shujun, Zhang Xiaochao, et al. Detection of seedcotton mass flow based on capacitance approach[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 47-52. (in Chinese with English abstract)
[30] 陳建國,李彥明,覃程錦,等. 小麥播種量電容法檢測系統設計與試驗[J]. 農業工程學報,2018,34(18):51-58.
Chen Jianguo, Li Yanming, Qin Chengjin, et al. Design and test of capacitive detection system for wheat seeding quantity[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 51-58. (in Chinese with English abstract)
[31] 王春玲,李宏宇,曾劍,等. 黃土高原半干旱區馬鈴薯氣候適宜度模擬及其時空變化特征[J]. 干旱氣象,2017,35(5):751-760.
Wang Chunling, Li Hongyu, et al. Spatial and temporal changes of climatic suitability of potato in semi-arid region of loess plateau[J]. Journal of Arid Meteorology, 2017, 35(5): 751-760. (in Chinese with English abstract)
Development of potato seed-metering state monitoring system based on space capacitance sensors
Zhu Liang1, Wang Guanping1※, Sun Wei1, Zhang Hua1, Liu Xiaolong1, Feng Bin1, Wang Chengjiang1, Sun Liping2
(1.,,730070,; 2.,733006,)
A spoon-type potato seed-metering has been widely used for easy preparation and seeding feasibility, due to its simple structure and low price, especially for small and medium-sized planters. But the relatively low reliability of seed-metering has led to the huge loss and significant reduction of yield, where the common miss-seeding rate can be about 5%-7%.Thetraditionalphotoelectric monitoring system cannot fully meet the high performance of anti-dust and anti-vibration. In this study, a new approach was proposed to construct a space capacitance sensor for the evaluation of seed-metering states and mass acquisition of seed potatoes. Specifically, the capacitance variation was obtained in the process of working seed spoon, when passing through the space surrounding the capacitor plates. A theoretical derivation was carried out first to evaluate the feasibility of the potato seed-metering state, according to the maximum net capacitance fluctuation (MNCF) signal. Furthermore, a Maxwell model was performed on the spatial capacitance sensor to determine the range of capacitance using the parameters and morphology of key components in a typical potato seeder. There was a direct influence of all parameters on the size of space capacitor plates to be constructed, including the shape of seed spoon, spoon chain, and the diameter of cutting seed tuber. Since the larger capacitance plates allowed for the higher base capacitance, there was no obvious fluctuation in the maximum net capacitance, when the seed tuber passed through the surrounding space. As such, the sensor sensitivity was reduced significantly. However, the misjudgment inevitably occurred, due to the insufficient sampling data, where the sampling frequency of the system was not enough, if the capacitor plate was too small, while the potato seed on the spoon moved quickly, particularly when the system working at a higher speed. Taking MAX038 as the core, the capacitance of the space capacitance sensor was indirectly obtained by/conversion-frequency measurement, and then the MNCF related parameters were calculated, according to Nyquist sampling. A special bench test of seed potato movement was also conducted under the constant temperature and humidity environment, thereby acquiring the regression models of temperature and humidity on the measured parameters. More importantly, the measurement data under different conditions was freely converted to a standard state. The specific parameters of the standard state were the temperature of 15℃ and humidity of 50% RH. In terms of different-sized seed potatoes with the same breed, there was a significant linear relationship between the MNCF and the weight. It was found that the system atic measurement error of spatial capacitance was less than 1%, and the error of seed potato mass acquisition was not more than 3%. The miss-seeding was determined accurately within the test range. Nevertheless, 2.33% of 1-seed normal-seeding was misjudged as the multi-seeding, and 2.78% of the 2-seeds multi-seeding was misidentified as normal-seeding, for the irregularity of test seeds. Misjudgment mainly occurred in an extreme case, particularly whether the single seed potato was too large, or the double seed potato was too small. Overall, the accuracy of the system was still higher than before. Correspondingly, the system performance under actual conditions can be widely expected to perform well on a complete judgment of normal-, miss- and multi-seeding at one time in the scheme. The finding can also provide a new reference for highly reliable monitoring of the potato seed-metering under severe dust and violent vibration environments.
sensors; monitoring; space capacitance; temperature and humidity; potato; seed metering status
朱亮,王關平,孫偉,等. 基于空間電容傳感器的馬鈴薯排種狀態監測系統研制[J]. 農業工程學報,2021,37(20):34-43.doi:10.11975/j.issn.1002-6819.2021.20.004 http://www.tcsae.org
Zhu Liang, Wang Guanping, Sun Wei, et al. Development of potato seed-metering state monitoring system based on space capacitance sensors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(20): 34-43. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.20.004 http://www.tcsae.org
2021-06-09
2021-10-11
甘肅省高等學校創新基金(2020A-050);國家自然科學基金項目(51765004);甘肅農業大學青年導師扶持基金項目(GSAU-QDFC-2019-10)
朱亮,研究方向為農業電氣化與自動化。Email:zhulianghn163@163.com
王關平,博士,副教授,研究方向為農業電氣化與自動化。Email:wgp678@163.com
10.11975/j.issn.1002-6819.2021.20.004
S24
A
1002-6819(2021)-20-0034-10
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
