雙臂工業機器人結構設計與運動的探究
2021-12-28 22:15:22王志強
家園·電力與科技 2021年11期
關鍵詞:機械臂
王志強

摘要:雙臂工業機器人是工業生產日趨復雜化、智能化背景下的主流發展趨勢,實用價值較為突出。文章以雙臂工業機器人為例,闡述了雙臂工業機器人的結構設計,論述了雙臂工業機器人的運動軌跡規劃方案,并進行了運動學仿真。得出:所設計的雙臂機器人協作配合默契,可以滿足復雜工業生產要求。
關鍵詞:雙臂工業機器人;C空間;機械臂
前言:
當前,工業機器人在醫學、建筑業、農業等諸多領域均發揮著顯著的作用。在各行業生產要求持續提升的背景下,工業機器人面臨的工作環境日益復雜,而現有單臂工業機器人無法達到復雜作業要求。因此,探討雙臂工業機器人的結構設計具有非常突出的現實意義。
一、雙臂工業機器人的結構設計
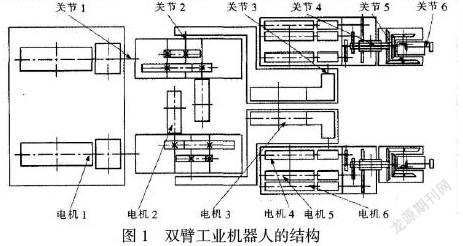
雙臂工業機器人的每一個機械臂由若干個緊湊的機械臂關節構成,每一個機械臂關節則由1個結構殼體、1個一體化關節組成[1]。具體如下:
如圖1所示,每一個關節均與電機相對應,關節1、關節2、關節3、關節4為一體化關節,主要為中空結構(螺釘+波發生器+減速器本體+密封圈裝+電機+螺釘+密封圈),中間預留空腔可以為機械臂電纜穿越提供空間,電纜結構被大大簡化,線纜、氣管穿越效率較高;而關節5、關節6則為差速機構聯動,外形、尺寸與人外形類似,主要利用1根實心軸+2根空心軸完成傳動任務,其中關節6運動由電機6控制,關節5運動則由電機6和電機5聯動控制。
二、雙臂工業機器人的運動軌跡規劃
1、建立C空間關鍵區域
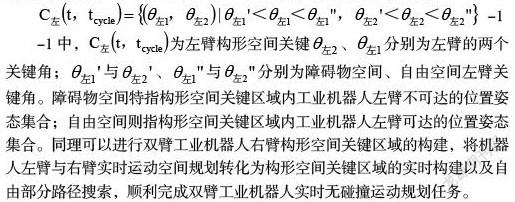
C空間又可稱之為構形空間,是運動物體相對固定障礙物無碰撞運動規劃首選方法。因現有雙臂工業機器人算法中對于左臂、右臂運動優先級別規定無差異,即兩者均可根據任務要求在對應的構形空間內完成無碰撞運動。因此,可以將左臂的構形空間構建作為第一步。即選擇左臂的2個關節角,進行左臂構形空間2個坐標變量的設置,同時將關節角取值范圍控制在0~2π之間,此時,左臂的C空間就是一個正方形,正方形的邊長為2π。同理,可以進行右臂構形空間的構建。同時考慮到構形空間基礎上的運動規劃算法表示為離線運動規劃算法,無法滿足雙臂工業機器人實時無碰撞運動規劃需求,且在每一步機器人以最新位置反饋信息為依據進行障礙物空間、自由空間重新構建時所需運算量較大。因此,可以引入構形空間關鍵區域概念,即選擇構形空間內可以為雙臂工業機器人手臂在時間片tcycle內到達的位置姿態的集合。此時,左臂在時刻t時的構形空間關鍵區域表示為:
-1中,C左t,tcycle為左臂構形空間關鍵 左2、 左1分別為左臂的兩個關鍵角; 左1'與 左2'、 左1"與 左2"分別為障礙物空間、自由空間左臂關鍵角。障礙物空間特指構形空間關鍵區域內工業機器人左臂不可達的位置姿態集合;自由空間則指構形空間關鍵區域內工業機器人左臂可達的位置姿態集合。同理可以進行雙臂工業機器人右臂構形空間關鍵區域的構建,將機器人左臂與右臂實時運動空間規劃轉化為構形空間關鍵區域的實時構建以及自由部分路徑搜索,順利完成雙臂工業機器人實時無碰撞運動規劃任務
2、實時無碰撞運動規劃
在構形空間關鍵區域構建的基礎上,利用局部算法,結合運動目標概念,綜合考慮雙臂工業機器人左臂末端當前位置與目標位置、右臂末端當前位置與目標位置,求解左臂與右臂構形空間關鍵區域自由部分,將雙臂工業機器人實時無碰撞運動規劃簡單轉化為工業機器人左臂、右臂在求得的自由部分依據特定目標函數選取一定位置姿態作為下一個時間片段的運動設計[2]。同時考慮到右臂目標函數為雙臂工業機器人右臂在位置姿態處手臂末端、右臂當前運動目標存在的歐式距離處于較小數值,可以將每一個時間片段內雙臂工業機器人的實時無碰撞運動規劃為4個環節。具體為:
第一步,選取右臂當前運動目標,以右臂末端當前位置與目標位置連線穿越左臂為節點,將左臂末端視為右臂當前運動目標,若兩者連線未穿越左臂,則右臂當前運動目標為右臂末端目標位置。
第二步,進行右臂構形空間關鍵區域構建。面向時間片段tcycle,利用右臂到達概率較高的幾個位置姿態P,進行右臂構形空間關鍵區域自由部分、障礙物部分的建立。
第三步,選擇右臂下一個時間段的運動目標,進行右臂目標函數位置姿態構建。
第四步,重復第一步、第二步、第三步,直到右臂運動到目標位置姿態。雙臂機器人左臂的實時無碰撞運動規劃與右臂相同。
三、雙臂工業機器人的運動學仿真及結果
1、運動學仿真
為了判定前期雙臂工業機器人實時無碰撞運動規劃準確性,利用Adams軟件,進行雙臂工業機器人的運動學仿真[3]。即在Adams軟件內,導入三維建模內建立的機器人模型,并進行材料屬性、關節約束條件、驅動(源于MatlabRoboticsToolbox工具箱內關節角度驅動用TestData、Spline函數)地逐一添加。同時進行仿真步數、仿真時間設置,分別為5000步、3.0s,設置完畢后進行仿真。
2、仿真結果分析
仿真結束后,打開PostProcessor,觀察大小臂、末端關節仿真后得出的關節位置力矩、末端機構滑動力矩,判定給定路徑關節運動時是否存在碰撞或桿件干涉。得出結果如下:
總結:
綜上所述,作為一種新型裝配機器人,雙臂機器人可以滿足復雜裝配任務,但仍然存在無碰撞運動規劃難題。因此,在合理設計雙臂工業機器人結構的基礎上,應以雙臂機器人無碰撞運動規劃為重點,在C空間建立的基礎上,完成雙臂機器人的實時無碰撞運動規劃。并對雙臂機器人的運動規劃結構進行分析,保證雙臂工業機器人運動控制精確性,為雙臂機器人應用范圍進一步擴展提供依據。
參考文獻:
[1]陳靖.工業機器人技術應用與發展[J].電子元器件與信息技術,2020(09):41-42.
[2]劉寶紅,溫可,何永義.基于初步建模仿真的雙臂SCARA機器人設計分析方法[J].計量與測試技術,2018(10):89-92.
[3]劉子貴.雙臂機器人的軌跡規劃研究與仿真[J].中國科技產業,2021(05):41-45.
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28