機(jī)械臂工作空間全局相對(duì)可操作度圖的構(gòu)建方法
2016-12-14 22:15:06李憲華疏楊張雷剛郭帥張軍
關(guān)鍵詞:機(jī)械臂
李憲華+疏楊+張雷剛+郭帥+張軍

摘要:針對(duì)機(jī)械臂工作空間的靈活性問題,提出了一種全局相對(duì)可操作度圖的構(gòu)建方法。該方法首先將機(jī)械臂工作空間進(jìn)行網(wǎng)格化處理,得到離散位置;然后在離散位置的均布小球上建立直角坐標(biāo)系,通過繞坐標(biāo)軸旋轉(zhuǎn)的方式完成機(jī)械臂姿態(tài)的離散;而后將每個(gè)離散位置上的位姿進(jìn)行逆運(yùn)動(dòng)學(xué)解算,并計(jì)算得到該位置上的最大相對(duì)可操作度;最后采用可視化的方法繪制出機(jī)械臂工作空間的相對(duì)可操作度分布圖,進(jìn)而揭示機(jī)械臂在其工作空間內(nèi)的靈活性分布規(guī)律。該方法為機(jī)械臂的設(shè)計(jì)提供了相關(guān)理論依據(jù),為機(jī)械臂的任務(wù)操作規(guī)劃奠定了基礎(chǔ)。
關(guān)鍵詞:機(jī)械臂;相對(duì)可操作度圖;逆運(yùn)動(dòng)學(xué)
中圖分類號(hào):TP241文獻(xiàn)標(biāo)志碼:A文章編號(hào):1672-1098(2016)01-0056-06
Abstract:Aiming at the flexibility of manipulators in working space, a method of constructing global relative manipulability map was proposed. In this method, the working space of the manipulator was processed by grid, and the discrete positions were obtained; then the rectangular coordinate system was set up on the discrete positions, and the discrete positions of the manipulator were accomplished by rotating the coordinate axis; the position and pose of each discrete position were calculated by inverse kinematics, and the maximum relative operational degree of the position was calculated; finally, the visual method was used to draw the relative operational degree distribution map of the manipulator in the working space to reveal the flexibility distribution of the manipulator in its working space. The method provides a theoretical basis for the design of the manipulator, and lays the foundation for the task operation planning of the manipulator.
Key words:manipulator, relative manipulability map, inverse kinematics
機(jī)械臂是模仿人體手臂而設(shè)計(jì)的一種自動(dòng)化操作裝置,其運(yùn)動(dòng)靈活性反映了對(duì)任務(wù)操作的轉(zhuǎn)換能力,靈活性指標(biāo)對(duì)于機(jī)械臂的設(shè)計(jì)、評(píng)價(jià)與運(yùn)動(dòng)規(guī)劃有非常重要的作用,機(jī)械臂運(yùn)動(dòng)靈活性是機(jī)器人運(yùn)動(dòng)學(xué)研究的一個(gè)重要內(nèi)容。
可操作度、條件數(shù)和最小奇異值是比較經(jīng)典的三個(gè)靈活性指標(biāo)[1],其中可操作度應(yīng)用較為廣泛,其物理意義可以解釋為機(jī)械臂各運(yùn)動(dòng)方向上能力的綜合度量。Yoshikawa將雅可比矩陣與其轉(zhuǎn)置矩陣乘積的行列式的之值定義為機(jī)械臂的可操作性指標(biāo),并提出了可操作度橢球的概念對(duì)機(jī)械臂的靈活性進(jìn)行描述[2];姚建初等利用方向可操作度對(duì)冗余度機(jī)械臂進(jìn)行運(yùn)動(dòng)規(guī)劃,提高了機(jī)械臂的運(yùn)動(dòng)能力[3];Hammond等利用加權(quán)各向同性指標(biāo),對(duì)機(jī)械臂進(jìn)行優(yōu)化設(shè)計(jì),并提出了力矩加權(quán)各向同性指標(biāo),同時(shí)考慮了運(yùn)動(dòng)靈活性與關(guān)節(jié)力矩[4];謝碧云等提出基于條件約束的方向可操作度指標(biāo),通過優(yōu)化側(cè)重點(diǎn)的改變,最大限度地保留了方向可操作度[5];趙京等采用相對(duì)可操作度指標(biāo)對(duì)構(gòu)型不同的機(jī)械臂靈活性分析,篩選出最佳串聯(lián)仿人機(jī)械臂構(gòu)型[6]。以上對(duì)于機(jī)械臂靈活性的研究大多針對(duì)機(jī)械臂工作空間任意點(diǎn)的運(yùn)動(dòng)能力進(jìn)行評(píng)價(jià),而對(duì)機(jī)械臂整個(gè)工作空間的靈活性分布情況未進(jìn)行研究。
本文針對(duì)國內(nèi)外研究的上述不足之處,以機(jī)械臂可操作度為基礎(chǔ),建立全局相對(duì)可操作度指標(biāo),通過對(duì)機(jī)械臂的位姿離散的方法,結(jié)合機(jī)械臂逆運(yùn)動(dòng)學(xué),基于Matlab平臺(tái)繪制機(jī)械臂全局相對(duì)可操作度圖,進(jìn)而從宏觀角度出發(fā)對(duì)機(jī)械臂的整個(gè)工作空間的靈活性加以分析。本文以Puma560機(jī)械臂為示例,研究機(jī)械臂工作空間相對(duì)可操作度圖的構(gòu)建過程。
1運(yùn)動(dòng)學(xué)與可操作度
11運(yùn)動(dòng)學(xué)分析
Puma560是機(jī)械臂研究中的典型,由6個(gè)旋轉(zhuǎn)關(guān)節(jié)組成,本體如圖1所示。利用D-H法對(duì)機(jī)械臂建模已成為機(jī)械臂運(yùn)動(dòng)學(xué)研究的標(biāo)準(zhǔn)方法,圖2為采用該方法建立的Puma560機(jī)械臂坐標(biāo)系,表1為其DH參數(shù)。對(duì)于其正逆運(yùn)動(dòng)學(xué)的求解…[7],在此不再贅述。借助于機(jī)器人工具箱,可以完成Puma560的正運(yùn)動(dòng)學(xué)解算,并可以得到8組逆運(yùn)動(dòng)學(xué)封閉逆解。
|det[J(q)]|;機(jī)械臂處于奇異形位時(shí),w=0。很容易地可以看到:機(jī)械臂除了位于奇異形位時(shí),可操作度指標(biāo)總是大于零的。此度量指標(biāo)可以用來衡量機(jī)械臂距離奇異形位的遠(yuǎn)近程度,可以用來衡量機(jī)械臂的靈活性。在評(píng)價(jià)機(jī)械臂靈活性過程中,總是希望得到統(tǒng)一量綱指標(biāo),為此定義機(jī)械臂工作空間的全局相對(duì)可操作度指標(biāo)來對(duì)機(jī)械臂的可操作性度量指標(biāo)進(jìn)行歸一化處理[6],如式(2)所示。
μi=wiwmaxi=1, 2,…,n (2)
式中:wi為機(jī)械臂工作空間點(diǎn)pi處的可操作度值,wmax為機(jī)械臂工作空間中的可操作度的最大值,μi為上述兩者間的比值,稱為全局相對(duì)可操作度值。當(dāng)μi=0時(shí),表示該點(diǎn)處于奇異形位;當(dāng)μi=1時(shí)表明該點(diǎn)操作度達(dá)到最大值,靈活性最好,顯然μi的取值范圍是[0,1]。對(duì)于Puma560機(jī)械臂,在已知各關(guān)節(jié)角度情況下,采用機(jī)器人工具箱可以完成可操作度的計(jì)算,本文采用蒙特卡羅方法,完成對(duì)Puma560機(jī)械臂工作空間的最大可操作度值wmax的求取,再通過式(2)可以得到該形位下機(jī)械臂的相對(duì)可操作度。
2相對(duì)可操作度圖構(gòu)建
21工作空間離散
以兩倍的機(jī)械臂長度lws為邊長,建立一立方體,顯然此立方體將機(jī)械臂工作空間包含于其中;對(duì)該立方體進(jìn)行網(wǎng)格化處理,將每條邊分成長度為lc的nc份,如式(3)所示,如此便把大立方體分成了n3c個(gè)小立方體,其邊長lclws,工作空間離散化網(wǎng)格劃分如圖3所示。
機(jī)械臂工作空間中任一點(diǎn)都可以劃分到各小立方體中,通過式(4)可以計(jì)算出所屬的小立方體,其中(tx,ty,tz)為機(jī)械臂工作空間中的任意點(diǎn);反之,通過式(5)可以計(jì)算出任一小立方體的中心坐標(biāo)位于機(jī)械臂基坐標(biāo)系下的坐標(biāo)。采用此種離散方法,機(jī)械臂工作空間中的任意位置都可以進(jìn)行定向分析,每個(gè)小立方體22姿態(tài)離散
為了將機(jī)械臂工作空間任意位置上的姿態(tài)進(jìn)行離散,首先將上述離散空間中的小立方體用與其各面都相切的球體代替,可見當(dāng)小立方體的邊長趨于無窮小時(shí),該球體與小立方體完全一致。采用螺旋點(diǎn)均布算法[8],在球體表面均勻分布np個(gè)小球體,如圖5所示,每個(gè)小球體的坐標(biāo)以球坐標(biāo)的形式給出,如式(6)~(9)所示。
θk=arccos hk,hk=-1+2(k-1)N-1,
1≤k≤N (6)
k=(k-1+36N11-h2k )(mod 2π),
2≤k≤N-1,1=N=0(7)
xk=lc2·sin θk·cos k
yk=lc2·sin θk·sin k
zk=lc2·cos θk (8)
pi=[xkykzk]T (9)
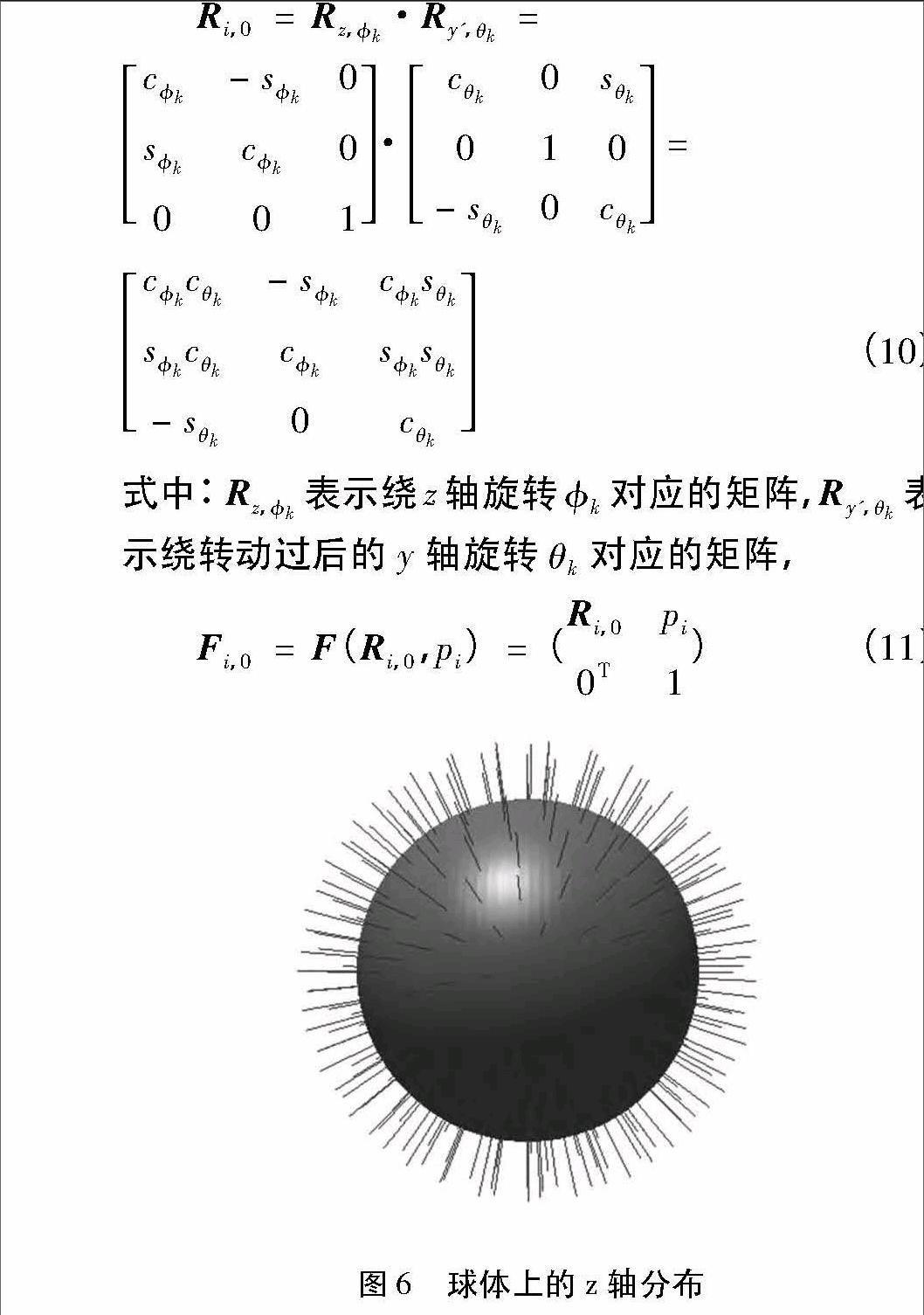
假設(shè)大球體和均布的小球體球心都固接有坐標(biāo)系,大球體坐標(biāo)系各軸方向與基坐標(biāo)系一致,小球體坐標(biāo)系的z軸為由大球體球心與小球體球心的連線,并且指向?yàn)榇笄蝮w球心到小球體球心,通過式(10)與(11)可以得到小球體坐標(biāo)系到大球體坐標(biāo)系的變換矩陣,均布小球體的坐標(biāo)系z(mì)軸如圖6所示。
至此,可以把Fi,0看作為機(jī)械臂的工具坐標(biāo)系位于大球體下的位姿,而Ri,0就是機(jī)械臂的某一姿態(tài)。
為了進(jìn)行姿態(tài)離散,將小球體上的坐標(biāo)系繞其z軸每隔Δ°0旋轉(zhuǎn)一次進(jìn)行離散,共分成m0份,如式(12)所示,旋轉(zhuǎn)矩陣如式(13)所示,則當(dāng)小球體上的坐標(biāo)系旋轉(zhuǎn)過α°k后,其位于大球體下的坐標(biāo)如式(14)所示。至此,可以將小球體上的任一坐標(biāo)系位于基坐標(biāo)系下的坐標(biāo)通過式(15)和(16)得到,從而完成了機(jī)械臂工作空間的任意位姿的離散。
m0=360Δ0(12)
Fz(αk)=Rz(αk)0
0T1αk=k·Δ0k≤m0 (13)
Fi,αk=Fi,0·Fz(αk)=F(Rot(i,k),pi) (14)
TBaseSphere (g)=F(I,w(g))=Iw(g)
0T1 (15)
FBaseTCP=TBaseSphere (g)·Fi,αk=F(I,w(g))·Fi,0·Fz(αk) (16)
23可操作度圖構(gòu)建
通過以上步驟可以實(shí)現(xiàn)機(jī)械臂工作空間的任意位置和姿態(tài),然而機(jī)械臂各關(guān)節(jié)由于機(jī)械結(jié)構(gòu)的限制并非所有的姿態(tài)都能到達(dá),Puma560機(jī)械臂各關(guān)節(jié)角度旋轉(zhuǎn)范圍如表1所示。因此,在完成機(jī)械臂工作空間的位姿離散后,要將每一個(gè)位姿進(jìn)行逆運(yùn)動(dòng)學(xué)驗(yàn)證,已驗(yàn)證該位姿是否存在逆解。若逆解存在則計(jì)算該構(gòu)形下的相對(duì)可操作度,否則按順序選取下一組位姿值進(jìn)行計(jì)算,重復(fù)上述步驟,直至機(jī)械臂工作空間所有位姿選盡,程序流程如圖7所示。
24Puma560相對(duì)可操作度圖及分析
按照?qǐng)D7所述機(jī)械臂工作空間相對(duì)可操作度圖構(gòu)建流程,以Matlab為平臺(tái),結(jié)合機(jī)器人工具箱,進(jìn)行Puma560機(jī)械臂的全局相對(duì)可操作度圖構(gòu)建。當(dāng)Puma560關(guān)節(jié)取(0,0,-π2,0,0,0)時(shí),機(jī)械臂伸直,為所能到達(dá)的最長距離,所以大正方體的邊長取此時(shí)度的2倍為17272 mm,小正方體邊長取35 mm,大球體上小球的數(shù)量取11,姿態(tài)按繞z軸每隔80°取。
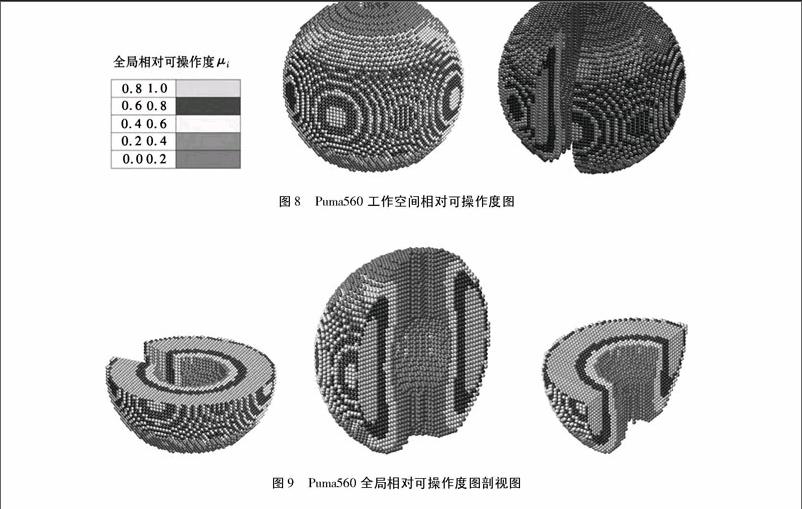
為Puma560的全局相對(duì)可操作度圖,從圖中可以看出該機(jī)械臂的最大可達(dá)空間為一球面,而由于關(guān)節(jié)機(jī)械結(jié)構(gòu)的限制,該球體并不完整,主要表現(xiàn)在從外到內(nèi)在機(jī)械臂第一關(guān)節(jié)為極限位置時(shí)有一個(gè)斷裂帶,并且該球體為中空的。理論上分析,可操作度圖球體表面應(yīng)全為紅色即相對(duì)可操作度為0,即機(jī)械臂處于奇異,而由于位置離散時(shí)小正方體的邊長取值相對(duì)較大,因此球體邊緣部分點(diǎn)可操作度較小,但并非為零。為了便于觀察機(jī)械臂相對(duì)可操作度的分布情況,對(duì)上述全局相對(duì)可操作度圖的球體進(jìn)行剖視,如圖9所示。通過圖9可以看出,Puma560工作空間的全局相對(duì)可操作度大體成帶狀分布,且大部分空間的相對(duì)可操作值達(dá)08~10。位于可操作度圖球體邊緣的點(diǎn)操作度較小,當(dāng)向球體中心移動(dòng)時(shí),相對(duì)可操作度值變大,然后再變小。圖8Puma560工作空間相對(duì)可操作度圖
3結(jié)論
本文從機(jī)械臂的工作空間出發(fā),以相對(duì)可操作度為基礎(chǔ),通過將機(jī)械臂工作空間位置離散與姿態(tài)散的方法,完成對(duì)機(jī)械臂整個(gè)工作空間的位姿離散,對(duì)位姿離散的方法進(jìn)行了詳細(xì)論述,而后以逆運(yùn)動(dòng)學(xué)為基準(zhǔn),對(duì)離散的位姿進(jìn)行篩選,對(duì)于滿足逆運(yùn)動(dòng)學(xué)的位姿進(jìn)行計(jì)算全局可操作度,采用三維直觀圖對(duì)機(jī)械臂工作空間的相對(duì)可操作度分布情況進(jìn)行描述,通過圖譜可以直觀地看出機(jī)械臂工作空間內(nèi)其相對(duì)可操作度的分布情況。
參考文獻(xiàn):
[1]熊有倫, 唐立辛, 丁漢,等.機(jī)器人技術(shù)基礎(chǔ)[M].武漢: 華中科技大學(xué)出版社, 2013:5-200.
[2]YOSHIKAWA T. Manipulability of robotic mechanisms[J]. International Journal of Robotics Research, 1985, 4(2):3-9.
[3]姚建初,丁希侖, 戰(zhàn)強(qiáng). 冗余度機(jī)器人基于任務(wù)的方向可操作度研究[J]. 機(jī)器人, 2000, 22(6):501-505.
[4]HAMMOND Ⅲ F L, SHIMADA K. Morphological design optimization of kinematically redundant manipulators using weighted isotropy measures[C]// International conference on robotics and automation. Kobe Japan, 2009, 2 931-2 938.
[5]謝碧云, 趙京. 基于條件數(shù)約束的方向可操作度[J]. 機(jī)械工程學(xué)報(bào), 2010, 46(23):8-15.
[6]趙京, 宋春雨, 杜濱. 基于人體工程學(xué)的仿人機(jī)械臂構(gòu)型[J]. 機(jī)械工程學(xué)報(bào), 2013, 49(11):16-21.
[7]付京遜, R. C. 岡薩雷斯. 機(jī)器人學(xué)[M]. 北京: 中國科學(xué)技術(shù)出版社, 1989:8-100.
[8]E B SAFF, A B KUIJLAARS. Distributing many points on a sphere[J]. Mathematical intelligencer, 1997, 19(1):5-11.
猜你喜歡
山東工業(yè)技術(shù)(2017年9期)2017-05-16 00:30:11
科技與創(chuàng)新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業(yè)技術(shù)(2017年4期)2017-03-28 07:56:48
求知導(dǎo)刊(2017年1期)2017-03-24 22:25:58
物聯(lián)網(wǎng)技術(shù)(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農(nóng)機(jī)使用與維修(2016年12期)2017-01-17 15:23:12
計(jì)算機(jī)教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28