環狀流液滴夾帶率測量方法及分析
2021-12-28 01:25:22趙寧賈慧君郭立強劉雨航方立德
化工進展 2021年12期
趙寧,賈慧君,郭立強,劉雨航,方立德
(1 河北大學質量技術監督學院,河北 保定 071002;2 計量儀器與系統國家地方聯合工程研究中心,河北 保定 071002;3 河北大學認證認可研究所,河北 保定 071000;4 河北白沙煙草有限責任公司保定卷煙廠,河北 保定 071000)
環狀流是氣液兩相流動中最典型的流型之一,其流動形式為氣相以連續相形式在管道中心沿軸向流動。液相一部分以很薄且波狀的液膜形式沿管道內壁四周軸向流動,另一部分以液滴夾帶形式存在于氣芯[1]。氣液兩相環狀流廣泛存在于石油化工[2]、天然氣開采及運輸、空調制冷系統[3]以及核反應堆冷卻[4]等眾多工業領域。環狀流液膜是傳質傳熱的重要載體,在蒸發冷卻裝置中傳熱蒸發過程極其復雜,液膜的流動特性直接關系到設備的安全運行,當液膜蒸發率與液滴夾帶率大于液滴沉積率時,壁面液膜逐漸變薄最終撕裂并干涸,將直接出現燒干現象威脅生產安全。同時在核反應堆失水事故和化工生產的降膜蒸發和汽提過程中,液泛現象對設備安全運行至關重要,其中液膜大尺度波動、運動和發展對液泛現象的產生有著不可分割的關系。液膜參數準確的定量研究對研究環狀流傳質、傳熱以及阻力特性等極為重要,因此,液膜參數的精確定量研究是目前兩相流研究領域的熱點研究領域之一[5-7]。
國內外的研究學者對液膜參數的實驗測量技術開展了廣泛研究,大量新技術新方法用于液膜參數測量,主要包括聲學、電學、光學和核輻射法。聲學法即超聲波液膜測量法,利用時差法測量液膜厚度[8-9]。電學方法按測量原理不同主要分為電導法和電容法[10-11]。光學法是利用全內反射、光影法、吸收衰減等原理實現液膜厚度等參數測量的方法[12-13]。核輻射法是基于X射線、伽馬射線、中子穿透兩相流結構時的輻射衰減來實現液膜厚度測量[14]。上述液膜參數實際測量方法都是通過間接測量獲得的,其測量模型多是基于物理或靜態實驗擬合模型,然而環狀流中液膜實際流動是動態波狀流動,液膜表面不斷發生霧化和沉降,其測量結果無法準確評價及溯源。而基于將液膜取出進而獲得其相關參數的測量法,由于其可溯源性和準確性在液膜參數研究中具有不可比擬的優勢,環狀流液膜的取出將為實驗法研究液膜參數的測量和溯源奠定基礎。
目前針對液膜提取方法按照結構原理主要分為管道鉆孔[15]和喇叭口管道[16]兩種。管道鉆孔的方式受管道材質和鉆孔工藝水平的制約,比如析水孔徑尺寸、均勻性、粗糙度、徑向分布等參數嚴重影響析水效率和析出速率的調節效果。此外,該方法還受管徑曲率和鉆頭尺寸限制,目前文獻中一般多采用1mm 孔徑,不適用于小管徑和較低液相表觀流速的環狀流,即對于極薄液膜提取時會發生氣體泄漏,造成當液膜質量流量較小時,測量結果誤差較大。利用喇叭口管道進行脫水時,需根據不同的流動條件調節兩者間的縫隙,喇叭口和主管道的距離調節不夠精細,機械設計精度需要很高,液膜取出速率太快時,易造成氣體泄漏。
因此本文在前期探索的基礎上,將多孔滲水介質應用于液膜提取,設計一種液膜在線提取裝置和基于液膜質量流量測量的夾帶率測量方法,開展了液滴夾帶率測量方法測量不確定度來源分析和評定。在河北大學小口徑高精度氣液兩相流模擬裝置上進行了75 組不同流動條件下的實驗,利用無夾帶流動條件下的實驗數據驗證本裝置及測量方法的精度,利用夾帶條件實驗數據對現有經典的夾帶率預測模型進行了分析與評價。該裝置及方法為研究氣液兩相環狀流液膜流動特性提供了一種可靠的實驗測試方法。
1 液滴夾帶率測量方法
1.1 液膜提取模塊
本文設計的液膜提取裝置主要由矩形儲液箱、多孔滲水介質、超聲波測距傳感器、電動球閥和抽氣泵等部件構成。儲液箱作為整個裝置的支撐結構和液膜儲存空間,主要考慮了結構強度、可操作性、實驗需求等三個方面,設計確定了儲液箱的容積、形狀、傳感器安裝位置和加工材質。考慮到實際應用過程中便于對液膜析出效果和儲液箱液位的觀察,選用有機玻璃作為儲液箱加工材質。管道采用透明有機玻璃材質便于觀察液膜是否取凈,單片機通過控制抽氣泵開關實現對環狀流多孔滲水介質管段內外差壓調節,控制液膜析出速率。超聲波測距傳感器可實現儲液空間液位的實時監測,通過反饋調節電動球閥開度,保持取出液膜質量流量穩定。液膜提取裝置整體如圖1所示。

圖1 液膜提取裝置整體
本文采用多孔滲水介質用于液膜提取,是實現環狀流液膜在線取出的關鍵。多孔滲水介質為不銹鋼粉末燒結而成,具有孔隙均勻、強度高、滲透性強的特點。滲水管壁呈多孔狀,管內的液膜借助液膜自身重力的壓差通過多孔的管壁滲漏到管壁外。多孔滲水介質的孔隙率可通過工藝過程加以調節,以適應不同流動條件的需求,析水速率可通過控制多孔滲水介質內外差壓值進行調節。綜合考慮本文選用的多孔滲水介質管路內徑為21mm,根據本文實驗流動條件的要求,多孔滲水介質管路部分選擇平均孔隙大小為100μm,管道長度為200mm,如圖2所示。

圖2 多孔滲水介質管段實物
1.2 差壓控制調節系統
水平管環狀流管壁處液膜受力情況如圖3 所示,FN為管壁的支持力,F為由于內外壓差液膜所受壓力,G為液膜所受重力。其中支持力FN和液膜所受重力G是定值。液膜在多孔滲水介質段處的析出速率決定著液膜是否被取凈。通過觀察透明管路中液膜存在與否判斷是否完全取凈,利用單片機控制信號實現對抽氣泵開關的控制,進而實現液膜的在線取出。差壓控制調節系統通過控制抽氣泵開閉狀態,進而調節管道內與儲液箱間的差壓值,增加或減小液膜析出的速度。

圖3 水平測試管路液膜受力分析
1.3 液位監測及調節控制系統
用于液位監測的傳感器選用的是US-015 型號超聲波測距傳感器,其工作溫度范圍為0~70℃,液位測量范圍為0.02~4m,其最小分辨率可達0.5mm。利用單片機處理超聲波測距模塊所產生的液位信號,在LCD顯示屏實時顯示通過串口與上位機通信,實現了儲液空間液位的實時監測,為系統判斷液膜質量流量是否穩定提供了支持。當液位高度處于監測傳感器精度最佳范圍時,根據超聲波測距傳感器的反饋信號判定液膜質量流量是否穩定,在充分發展的氣液兩相環狀流中,待液膜析出完全時,根據液位反饋信號,單片機輸出的信號經信號轉換處理電路處理后直接控制電動調節閥開度,當儲液箱液位保持不變時,停止調節球閥開度,認為此時所流出的液相質量等于管路中被提取的液膜質量。利用單片機發出指令驅動換向器將管路換向至計量管路。液位監測及調節控制如圖4所示。

圖4 液位監測及調節控制
通過計算超聲波信號傳播的時間t(s)已知在15℃、1atm(1atm=105Pa)下聲音的傳播速度為340m/s。設液位為S(cm)液位最大值為40cm,由式(1)即可計算得到液位。

1.4 換向器和計時系統
本文設計的換向器為換向漏斗,由單片機控制電磁鐵推拉連桿擺動從而控制漏斗的換向。換向器起流動切換的作用,換向器在啟動的同時觸發計時器進行計時。換向器結構如圖5所示。液體從換向器直徑為20mm的入口流入,經換向漏斗流動切換分別將需要收集的液體和廢液通過噴嘴口徑為10mm的出口經軟管排出。對收集到的液體進行稱重,由LCD 屏可以讀出所收集液體的時間,由此便可通過公式計算出單位時間的質量流量。
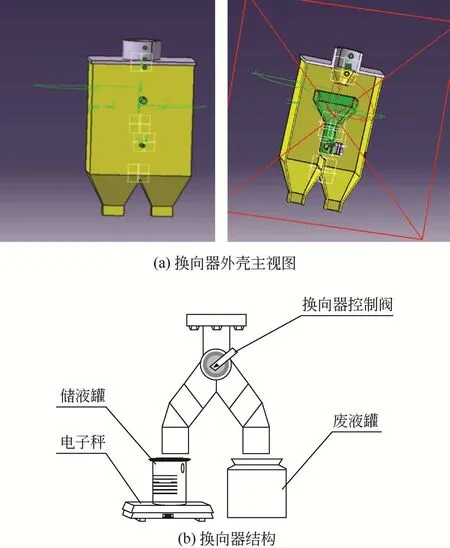
圖5 換向器結構
采用接觸器控制開關控制連桿,連桿采用浮動式連接,降低連桿運動時的摩擦,相比于氣缸換向裝置換向更迅速,換向時水流更穩定。此外,入口處的噴嘴口徑在換向器內部是由20mm逐漸縮小至10mm制成,在縮小了口徑的同時也延長了入口的長度,從而降低了因入口處漏液產生的誤差,提高了換向器測量的精度。
計時器系統系統由STC89C52 單片機、LCD1602顯示屏、電源控制電路、降壓模塊、繼電器模塊構成。精確計時控制系統的主控制部分采用STC89C52 單片機,其晶振頻率范圍為0~40MHz,計時精度達2×10-8s,不僅可以簡化電路結構、降低成本,而且可靠性好,易于擴展。換向計時器系統設置外部操作按鈕,通過電路板上的K1、K2、K3三個開關控制計時器啟動計時、暫停和清零功能,同時K1、K2還控制著電磁鐵的通斷。
1.5 液滴夾帶率測量方法
液膜質量流量計量系統由液膜收集容器、精密電子天平組成。待儲液容器內液位在1~2min內保持不變,即液膜質量流量穩定時,由自動控制系統控制換向器使液相介質導入儲液罐,經一段時間后由自動控制系統控制換向器使液相介質再次導入廢液罐,自動控制系統監測并記錄該兩次換向的時間間隔t(s),即收集時間間隔。用精密電子天平對液膜收集容器及液相介質進行稱量,進而得到時間間隔t內取出液膜的質量,即可由式(2)得到液膜質量流量。

式中,MLF為液膜質量流量,kg/s;m為該時間內收集的液相總質量,kg,t為液膜收集時間,s。
得到液膜質量流量MLF后,可通過式(3)計算得到夾帶率E。

式中,ML為液相質量流量,kg/s;MLE為液滴質量流量,kg/s。
2 液滴夾帶率測量方法不確定度評定
2.1 差壓控制調節系統引入的測量不確定度分量
測得液位變化量后,單片機要快速判斷輸出合理的電壓控制信號。測試過程中,為避免單片機持續輸出變化的控制信號造成電動調節閥無法響應或卡死,當一次液位變化量測量完成后,單片機將等待電動調節閥根據開度輸出的反饋信號,若反饋信號處在設計的誤差范圍之內,則進行下一次測量,若反饋信號不符合誤差要求則繼續等待。同時為了便于對系統的調試,本文將控制信號和反饋信號通過串口發送給上位機輸出顯示。本文程序方案設計距離差值增加大于1cm 時,控制電壓增加8%,電壓最高為5V,理論輸出應為0.4V,結果顯示為0.39V,其相對測量不確定度為0.2%。
2.2 液位監測引入的測量不確定度分量
儲液箱最高液位發生在垂直測試時為32.7cm,最低液位為0,根據液膜提取方法,最終儲液空間液位將保持不變,因此對傳感器最低液位檢測能力要求可高于0,最大檢測能力不得低于33cm。由于本文選用的超聲波測距模塊最低分辨率為0.5mm,其在最大液位處的相對測量不確定度為0.15%。
2.3 液膜稱量引入的測量不確定度分量
取出液膜收集容器,用精密電子秤對液膜進行稱重,進而測量取出液膜的質量。本次實驗所選用JJ1000 精密電子天平,量程為1000g,最小分度值為0.1g,分辨率0.01g。其相對測量不確定度為0.02%。
2.4 裝置測量不確定度評定
裝置測量不確定度見表1。

表1 測量不確定度評定
3 實驗驗證和結果分析
3.1 實驗裝置及參數范圍
本文所進行的環狀流實驗在小口徑高精度氣液兩相流模擬裝置上進行,實驗裝置如圖6所示。本裝置采用的流動介質為壓縮空氣和水,氣源采用空氣壓縮機提供,流經穩壓罐,然后通過空氣過濾器。液相由水泵產生,通過變頻器對液體流速進行控制。氣液兩相標準管路混合前分別經過標準管路予以計量,采用渦輪流量計作為標準表。為了保證氣液兩相流的穩定,在氣體流量計前接10D穩流段直管路,從而使流量計測得的數據更精確、更穩定。液相流動通過霧化噴嘴將液相以水霧狀形式同氣相流動相混合,通過DN50管路混合,混合后經6D穩流管路產生穩定的氣液兩相環狀流動。氣相體積流量范圍為4~40m3/h,精度等級為1.5級,液相體積流量范圍為0.1~1.2m3/h,精度等級為0.5級。該實驗裝置采用雙循環回路設計,主要由氣路循環回路、水路循環回路、氣液混合水平及垂直實驗管段、計算機控制系統等組成。將該裝置與本文設計的環狀流液膜取出系統串聯,開展對本文所設計裝置的穩定性、可控性等進行實驗驗證。

圖6 實驗裝置
本文氣液兩相環狀流動實驗參數范圍見表2。根據水平管貝克流型圖(圖7)可知本次實驗流動條件均滿足環狀流發生條件。

表2 實驗參數范圍

圖7 實驗參數范圍
3.2 實驗結果分析
由氣液兩相流動的基本知識可知,當氣液兩相環狀流動無液滴夾帶現象時,入口處流量計處的液相質量流量ML應等于實驗測量得到的液膜質量流量MLF。基于上述原理開展了液膜質量流量測量裝置的測量進度驗證實驗。根據兩相流體動力學理論可知,當氣相表觀流速低于臨界氣相流速時基本不存在液滴夾帶現象,臨界氣相流速可由Pan 等[17]提出的預測模型[式(4)]計算得到,即ucg=12.9473m/s。為驗證該液膜提取裝置在液膜質量流量和液滴夾帶率的測量過程中的可操作性及準確性,根據式(4)選取環狀流動無夾帶現象下液相表觀流速0.068~0.143m/s,氣相表觀流速9.62~12.65m/s。液膜質量流量MLF與液相質量流量ML之間的一致性將以平均絕對百分比誤差(MAPE)表示[式(5)]。圖8給出了當氣相表觀流速從9.62m/s 增加到12.65m/s 時液相質量流量ML與液膜質量流量MLF兩者間的差值,其MAPE 為3.19%,92%實驗點的相對偏差在±6%以內。

式中,D為管路直徑,mm;ucg為氣相臨界流速,m/s;ρg為氣相密度,kg/m3;ρl為液相密度,kg/m3;σ為表面張力系數,N/m。
由圖8可看出,液相質量流量與液膜質量流量相對誤差基本為負值,即入口液相質量流量ML大于實驗測得液膜質量流量MLF。但是在低氣相表觀流速下(usg≤10.25m/s),兩者的最大相對誤差優于2%。因本文選取的夾帶產生時的臨界氣相表觀流速公式(4)為經驗-擬合模型,其適用范圍和本文實驗條件有偏差,使得在較大氣相表觀流速條件下,實際實驗過程中可能會存在液滴夾帶,使得入口液相質量流量ML與實驗所得液膜質量流量MLF存在較大偏差。

圖8 液相質量流量與液膜質量流量對比
該裝置的主要目的是實現液膜的精確在線提取,結合其他儀器設備實現液膜質量流量和液滴夾帶率的測量,為兩相流參數研究奠定基礎。為此本文開展實驗,驗證了該裝置在液膜質量流量測量過程中的可操作性。測試過程中氣相表觀流速范圍為12.94~18.01m/s,液相表觀流速范圍為0.08~0.146m/s,測量液膜質量流量及液滴夾帶率。圖9和圖10 分別為各組液膜質量流量和液滴夾帶率測量結果。
由圖9、圖10 可以看出,同一氣相流速條件下,隨著液相流速的增加,液膜質量流量隨之增加,液滴夾帶率也隨之增加。通過上述實驗與測量不確定度分析,無夾帶實驗條件下液相質量流量ML與液膜質量流量MLF的測量不確定度絕對值在很小的范圍內,有夾帶實驗條件下所得液膜質量流量和液滴夾帶率測量結果整體趨勢較為明顯,變化趨勢總體符合預期要求。說明該測量方法測量準確性好,該裝置符合設計要求,可操作性強,可用于液膜參數研究過程中對液膜質量流量和液滴夾帶率的測量實驗以及對現有夾帶率模型的評價。

圖9 液膜質量流量隨液相表觀流速變化

圖10 液滴夾帶率隨液相表觀流速變化
3.3 夾帶率預測模型評價
通過對現有夾帶率預測模型的系統分析,選定了兩種具有代表性的預測模型,見表3,并對其在12.94~18.01m/s 五個不同氣相表觀流速條件下預測效果進行實驗驗證。Pan 等[17]將夾帶定義為霧化和沉積速率之間的平衡,提出水平管中環形流動的夾帶率測量公式。Dallman 等[18]通過理論分析指出環狀流液膜霧化效應和液滴沉降效應共同導致氣核中液滴夾帶的產生。在水平環狀流中,當氣相表觀流速較低時,重力是影響液滴的沉降效應主要因素;而在高氣相表觀流速時,液滴沉降是湍流運動決定的,并提出了一種水平管環狀流夾帶率的半經驗的預測公式。

表3 夾帶率預測模型總結
為了評價以上夾帶率預測模型的準確性,本文利用不同氣相表觀流速條件下的實驗測量值與兩種模型預測值進行了對比,如圖11、圖12 所示。預測值與實驗測量數據之間的一致性將以平均絕對百分比誤差(MAPE)表示[式(6)]。

圖11 Pan等[17]夾帶率對比結果

圖12 Dallman[18]夾帶率對比結果

式中,xcorr,i為預測值;xexp,i為實驗測量值。
Pan等[17]的預測結果如圖11所示,實驗點預測結 果 的76% 相 對 偏 差 在±25% 以 內,MAPE 為18.17%。低氣相表觀流速如12.94m/s、14.28m/s、15.53m/s 時,MAPE 為8.85%;高氣相表觀流速如16.83m/s、18.01m/s 時,MAPE 為32.14%。從圖中可以看出在低氣相表觀流速時具有更好的預測效果,隨著氣相表觀流速的增加,預測結果離實驗值越來越遠。在低氣相表觀流速下,重力是影響液滴沉降的主要作用,需要考慮周向分布的不對稱性,在高氣相表觀流速下,不對稱性逐漸消失,環狀流的表現行為更接近垂直管。本文引入周向分布均勻系數αk[5][式(7)],計算得αk值隨氣相表觀流速的增加由1.35 減小到1.06,逐漸接近1,在usg=16.83m/s 和18.01m/s 時表現明顯,說明隨著氣相表觀流速的增加,水平管中液膜周向分布不對稱性逐漸消失,周向分布逐漸均勻,重力不再起主導作用,湍流起主導作用,在氣相表觀流速為16.83m/s 和18.01m/s 條件下,水平管環狀流的液滴霧化沉降行為更接近垂直管。Pan 等[17]的模型預測結果同該模型適用于低氣相表觀流速下水平管環狀流夾帶率結論一致。

式中,δ為平均液膜厚度,mm;δt為管道頂部液膜厚度,mm;δb為管道底部液膜厚度,mm;Fr為弗勞德數;Gm為質量流率,kg/(m2·s);g為重力加速度,m/s2;Mg為氣相質量流量,kg/s;AD為管道截面積,m2。
圖12 表明Dallman 等[18]的預測結果,實驗點預測結果的78%的相對偏差在±20%以內,MAPE 為11.95%。高氣相表觀流速如16.83m/s、18.01m/s時,MAPE 為2.85%;低氣相表觀流速如12.94m/s、14.28m/s、15.53m/s 時,MAPE 為18.01%。從圖12中可以看出,該模型在高氣相流速時預測效果更好,隨著氣相流速的減小,預測準確性降低。Dallman 等[18]的模型主要適用于垂直管環狀流,在高氣相表觀流速下,湍流是影響液滴沉降的主要作用,使周向分布更為均勻,所以在高氣相表觀流速下,垂直環形流動導出的方程可以應用于水平管。根據上文計算得αk,在氣相表觀流速為16.83m/s和18.01m/s條件下,水平管環狀流的液滴霧化沉降行為更接近垂直管。Dallman 等[18]的模型預測結果同該模型適用于高氣相表觀流速下水平管環狀流夾帶率結論一致。
綜上所述,Pan 等[17]的模型中重力是影響液滴沉降的主要作用,適用于低氣相表觀流速;Dallman 等[18]的模型中湍流是影響液滴沉降的主要作用,適用于高氣相流速。通過本實驗裝置驗證,結果表明Pan 等[17]的模型在低氣相表觀流速時具有更好的預測效果,Dallman 等[18]的模型在高氣相表觀流速時具有更好的預測效果,本實驗數據在低氣相表觀流速和高氣相表觀流速下分別滿足了重力和湍流占主導作用的過程,說明本文設計的液膜在線提取裝置和質量流量測量方法對液膜質量流量和液滴夾帶率測量結果可溯源,測量準確性高。
4 結論
本文主要進行了環狀流液膜提取設計和流量計量系統的研究。
(1)通過對現有液膜參數研究測量方法進行分析對比,提出了液膜在線提取裝置和基于液膜質量流量測量的夾帶率測量方法。通過超聲波測距傳感器進行液位監測以及對環狀流多孔滲水介質管段內外差壓調節設計實現了環狀流液膜的精確在線取出。
(2)對小水流量換向器進行改良,改善了現有技術的不足,結構簡單,精度較高,相比于氣缸換向裝置換向更迅速,換向時水流更穩定,適合應用在小水流液體管道,具有較高的應用價值。
(3)完成了無夾帶實驗條件下液膜質量流量測量以及測量不確定度分析,說明該測量方法測量準確性好。完成了存在夾帶實驗條件下液膜質量流量和液滴夾帶率測量,研究發現固定氣相流速,隨液相流速的增大,質量流量逐漸增大,液滴夾帶率也逐漸增大。
(4)對現有夾帶率預測模型進行驗證,進一步說明本文設計的液膜在線提取裝置和基于液膜質量流量測量的夾帶率測量方法測量結果可溯源,測量準確性高。
符號說明
AD—— 管道截面積,m2
D—— 管道直徑,mm
E—— 夾帶率,%
EM—— 最大夾帶率,%
F—— 內外壓差液膜所受壓力,N
FN—— 管壁的支持力,N
Fr—— 弗勞德數
G—— 重力,N
Gm—— 質量流率,kg/(m2·s)
g—— 重力加速度,m/s2
MAPE—— 平均絕對百分比誤差,%
Mg—— 氣相質量流量,kg/s
ML—— 液相質量流量,kg/s
MLE—— 液滴質量流量,kg/s
MLF—— 液膜質量流量,kg/s
MLFC—— 臨界液相質量流量,kg/s
m—— 收集的液相總質量,kg
S—— 液位,cm
t—— 時間,s
Urel—— 相對擴展不確定度,%
Usg—— 氣相表觀流速,m/s
Usl—— 液相表觀流速,m/s
ucg—— 氣相臨界流速,m/s
x—— 干度
xcorr,i—— 夾帶率預測值,%
xexp,i—— 夾帶率實驗測量值,%
αk—— 周向分布均勻系數
δ—— 平均液膜厚度,mm
δb—— 管道底部液膜厚度,mm
δt—— 管道頂部液膜厚度,mm
μg—— 氣相動力黏度,N·s/m2
μl—— 液相動力黏度,N·s/m2
ρg—— 氣相密度,kg/m3
ρl—— 液相密度,kg/m3
σ—— 表面張力系數,N/m
下角標
b—— 管道底部
g—— 氣相
LE—— 液滴
LF—— 液膜
LFC—— 臨界液相
l—— 液相
M—— 最大
t—— 管道頂部
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國生殖健康(2019年2期)2019-08-23 08:12:08
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
產品可靠性報告(2017年7期)2017-09-05 09:49:12
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車觀察(2016年3期)2016-02-28 13:16:26
