多能源送端電網暫態能量平衡快速魯棒控制模型
2021-12-28 04:59:08陳偉偉張增強畢立松余中平張文朝關洪浩于國康
可再生能源 2021年12期
陳偉偉,張增強,畢立松,余中平,張文朝,關洪浩,于國康
(1.國網新疆電力有限公司經濟技術研究院,新疆烏魯木齊 830002;2.新疆大學,新疆烏魯木齊 830046;3.北京科東電力控制系統有限責任公司,北京 100192)
0 引言
隨著我國電力系統規模的不斷擴大和可再生能源、多源儲能、多能源轉換等接入容量的快速增加,遠距離大容量輸電系統、區域互聯系統間功率交換和功率平衡問題日益復雜。多能源接入與大規模跨區送電,使電網在經歷大擾動中選擇系統穩定優化控制策略和在嚴重故障下選擇合適的安全穩定控制措施,變得更加困難[1],[2]。
目前,電力系統暫態過程能量平衡控制中,最常用的安全穩定控制策略是針對同步電源的功率控制或切機控制。國內外專家針對不同類型故障下保證電力系統暫態能量平衡功率控制決策開展了較多的研究。文獻[5]以穩定性能指標作為暫態能量控制約束條件,通過反向積分計算得到反映當前故障的線性不等式,再通過迭代計算得到最優機組功率控制策略。文獻[6]分析了不同故障形式下多種穩定形態的分類和原理,為研究不同故障形式下的功率控制策略奠定了基礎。文獻[7]將故障切除時發電機的轉子角速度和動能作為暫態能量平衡控制策略優化的關鍵指標。文獻[8]綜合系統拓撲和暫態功率控制前后發電機同步系數進行動態網絡同步化,通過電力系統線性和非線性模型確定最優功率控制策略的切機量。文獻[9]基于轉子運動方程,分析了電力系統在正常工況下、故障切除時刻和采取機組功率控制措施時刻的運行特性,提出一種求取最小功率控制切機量的方法。文獻[10],[11]研究了相軌跡斜率對暫態能量控制策略及機組功率控制的影響,提出一種功率控制策略表的整定措施。
本文針對送端系統在經歷大擾動下的暫態能量平衡過程,提出基于送端電網慣性及狀態參數表征的能量平衡過程的動力學模型,并以該動力學模型的離散狀態空間表達和送端電網阻尼特性,建立暫態能量預測控制模型;進而在考慮多能源接入后的系統阻尼不確定性基礎上,建立多能源送端電網能量平衡魯棒優化控制模型。本文以河北某典型的送出系統為仿真算例,對所提出的暫態能量控制模型進行了仿真驗證。
1 送端電網暫態能量模型
考慮弱送端電網中電、熱、氣等多能源源荷特性的送端電網等值模型如圖1所示。

圖1 外送電網等值模型Fig.1 Equivalent model of external transmission grid
電、熱、氣多能源耦合矩陣如下式所示:
式中:ε為能源間的耦合系數。
送端系統內的電、熱、氣子系統間存在慣性差異。若電網慣性時間常數為Δt1,熱網慣性時間常數為Δt2,氣網慣性時間常數為Δt3,且Δt2>Δt3>>Δt1,當系統內電力負荷出現波動時,可在短時間尺度內調節熱負荷及氣負荷容量,從而優化送端系統的實時功率平衡特性。
設送端電網中熱力系統及燃氣系統可調節的容量為

式中:T為傳輸介質溫度;C為傳輸介質的比熱容;mH為熱力系統傳輸介質流量;p為壓強;mG為燃氣系統氣體流量;τH,τG分別為熱力系統和燃氣系統的慣性時間常數。
發電機可調節容量約束為
式中:Pchpmin,Pchpmax分別為熱電聯產機組電功率下限和上限;RU,tchp,RD,tchp分別為熱電聯產機組的爬坡速率和滑坡速率。
設送端電網的等值慣量為Mou、等值機械功率為Mou、等值電磁功率為PEou;受端電網的等值慣量為Min、等值機械功率為PMin、等值電磁功率為PEin,則送受端系統的轉子運動方程為
式中:M,PM,PE分別為等值系統慣量、等值系統機械功率和等值系統的電磁功率。
根據式(11),若利用熱力系統以及燃氣系統中較大的時間慣性,對特定時間尺度內送端電網負荷總量進行控制,當送端電網在大量失負荷時,則可通過送端電網中的電、熱、氣等多能源協調,對受端電網的能量輸出進行緊急控制。控制原理如圖2所示。
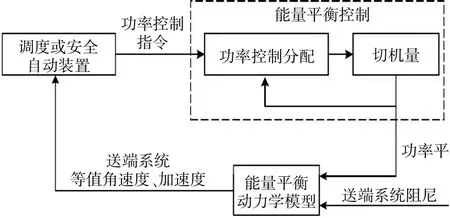
圖2 送端電網暫態能量平衡控制原理Fig.2 Principle of transient energy balance control of transmission-end power grid
由圖2可知,根據送端系統的能量控制需求,要根據送端電網頻率變化的角速度、加速度等動力學狀態,對系統中電、熱、氣等多能源系統的源荷特性進行動態調節。
送端電網電源能量控制過程表示為
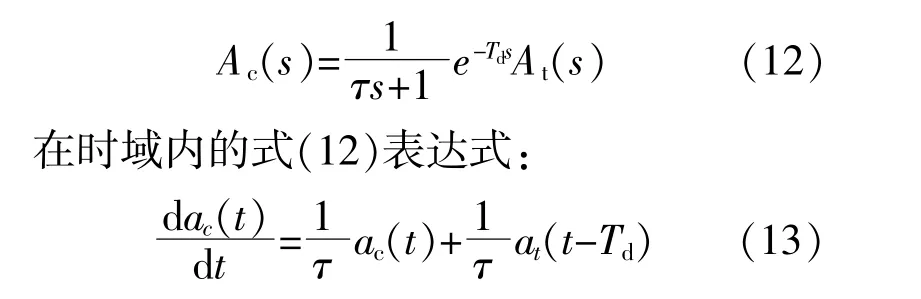
式中:ac(t)為送端電網等值同步電源轉子加速度;at(t)為功率控制擬獲得的目標加速度;τ為送端系統總的慣性時間常數;s為復參變量;Td為送端系統功率控制系統的延時。
根據式(12),(13)可知,送端電網在緊急能量平衡控制時,能量變化動態過程的狀態方程為
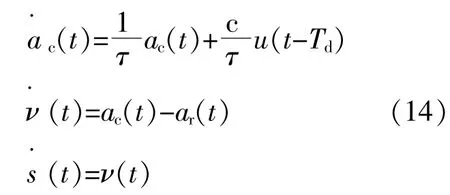
式中:ν(t),s(t)分別為送端電網電源等值同步模型中的轉子轉速和功角。
在實際電網的功率緊急控制中,無論是調度指令,還是控制裝置指令,均是根據對系統狀態的實時觀測值進行優化控制。將式(14)離散化,并以Δu的形式表示系統功率控制指令:

式中:
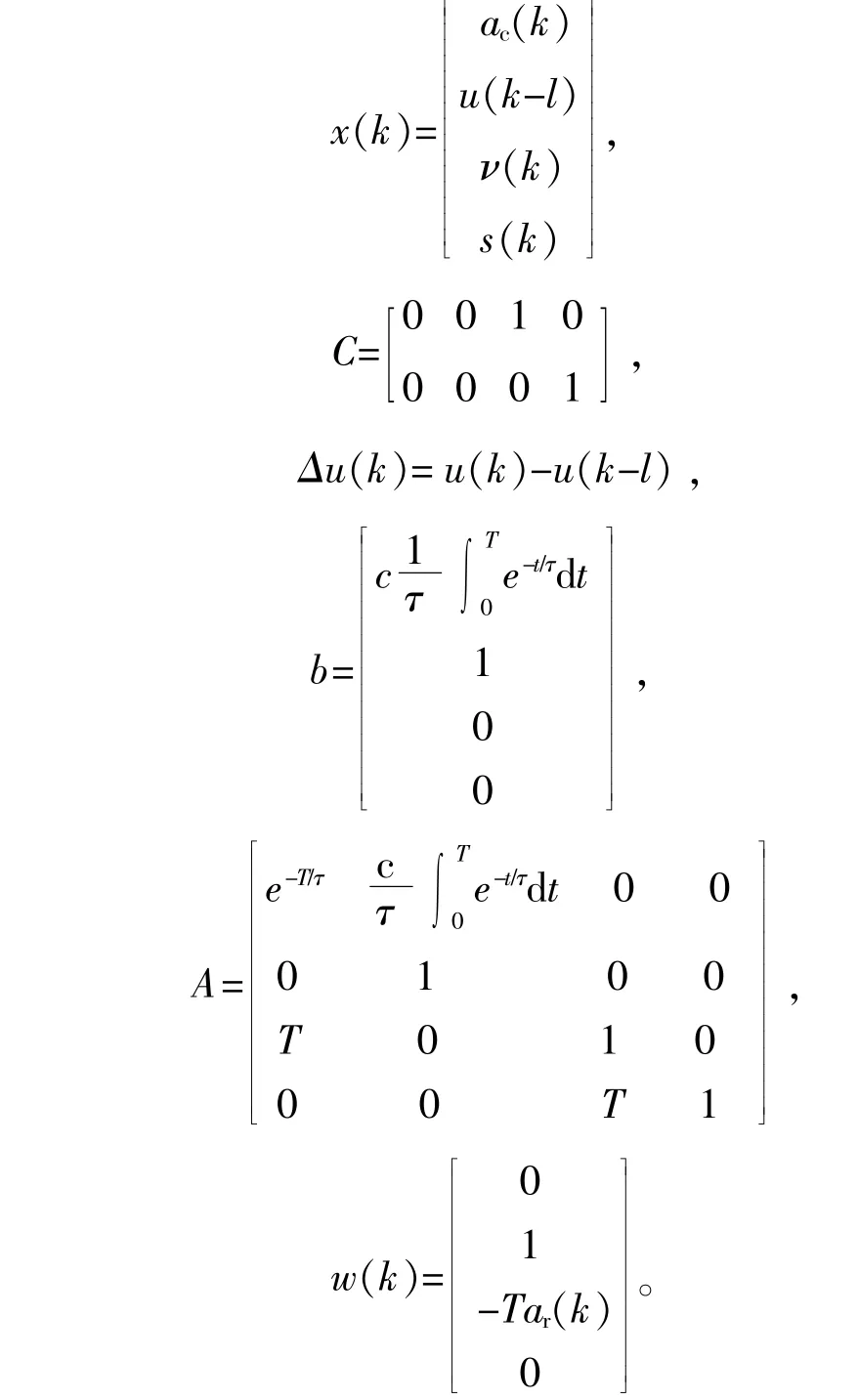
式中:T為送端系統各物理量采集的樣本時間間隔;l=Td/T,為狀態方程時延;w(k)為送端電網總等值阻尼;u(k)為系統在進行緊急狀態能量平衡控制過程中的功率控制量,在暫態能量控制中,一般可等效為切機量。
2 送端電網暫態能量預測控制模型
當送端電網的網絡拓撲和阻尼參數已知時,將w(k)作為前饋項,可將預測模型線性化表示:
送端電網暫態能量平衡過程的預測時域和控制時域均取為N,則送端電網能量平衡的動態預測控制問題可描述為在送端電力系統狀態變量的每一個采樣時刻k,求解一個二次型優化問題PN(Δu):
式中:xsi|k為送端系統等值同步電源的轉子運動狀態;Q為描述送端系統轉子運動狀態各參數權重的對稱矩陣;R為送端系統能量控制過程中功率控制量權重;‖xN|k-xsN|k‖2P為系統中各同步機功角相對偏離懲罰函數,選取適當的R,以獲得暫態過程中各采樣時刻合適的切機量增量及其變化率;‖xi|k-xsi|k‖2Q為送端系統轉子運動狀態跟蹤函數。
PN(Δu)的約束為
式中:xk為送端系統等值同步電源狀態在采用時刻k的實際值;X為送端系統等值同步電源狀態跟蹤誤差的可行集,可由轉子運動狀態預測值xi|k與轉子運動狀態觀測值xsi|k得到;N[0,N-1]為從0到N-1的整數;Xf為送端系統在能量平衡控制結束時狀態向量的穩態集合。
通過求解送端電網暫態能量平衡控制優化問題PN(Δu),可得暫態能量平衡控制的最優功率控制向量:

送端電網暫態能量控制過程中,在k時刻施加了Δu*0|k切機量指令后,當送端系統運行到下一時刻k+1時,在新運行狀態測量參數下,繼續求解送端系統功率控制量優化問題PN(Δu),將系統的能量平衡控制在時域內進行動態優化。
3 多能源送端電網暫態功率魯棒控制器
送端電網暫態能量平衡的優化控制問題PN(Δu)模型是在考慮送端系統阻尼已知且恒定不變前提下的控制模型。當送端電網接入較大規模的可再生能源發電、電制熱負荷等多能源設備和設施后,送端系統的阻尼狀態可能隨時間非線性變化,且可能具有較大的不確定性。
由于阻尼不確定性及其波動范圍較大,本文采用t Location-scale分布對阻尼不確定性帶來的預測誤差進行分析。t Location-scale分布的概率密度函數表達式為
式中:Γ(x)為伽馬函數;σ為尺度參數;ν為自由度;μ為位置參數;如果y=(x-μ)/σ,則y服從由自由度為ν的t分布。
阻尼不確定性對電網暫態過程中狀態變量預測誤差影響的優化問題可表示如下:

式中:x為n維電網暫態狀態向量;ξ為t維的阻尼不確定性隨機向量,其概率密度函數為Φ(ξ);f(x,ξ)為目標函數;gj(x,ξ)為隨機約束函數;EX為期望值算子。
當可行解x*是期望值模型的最優解時,對任意的可行解x,EX[(x*,ξ)]≤EX[f(x,ξ)]成立。
多能源送出電網中,在系統阻尼不確定條件下,設送端電網阻尼不確定性為有界集合w?W。在預測控制模型的各控制時刻的優化中,仍設N時刻后采用反饋控制策略,以計算送端系統的功角偏離懲罰函數和狀態跟蹤函數,對阻尼不確定性帶來的預測控制誤差進行修正:

式中:K?Rn,且使Acl=A+bK為Hurwitz陣。
送端電網暫態能量平衡過程中,各發電機初始功角和轉速分別為s0,ν0,送端電網暫態過程中允許最大轉子加速度為a0,送端系統允許的功角擺動曲線為xsk+1=Axsk,則此時送端暫態能量平衡控制在阻尼w下的轉子運動狀態跟蹤誤差為

根據送端電網暫態能量平衡控制優化問題中的假設,在實時N個時刻的預測控制后,采取反饋控制Δu=K(x-xs),則k+1時刻送端電網暫態能量平衡控制的一組可行功的機組切機量控制策略為

4 算例分析
以河北某電廠送出案例對本文所提出方法進行驗證。采用PSD-BPA機電暫態仿真軟件構建如圖3所示的單廠送出系統。都上都電廠通過三回線輸電通道接入受端系統。
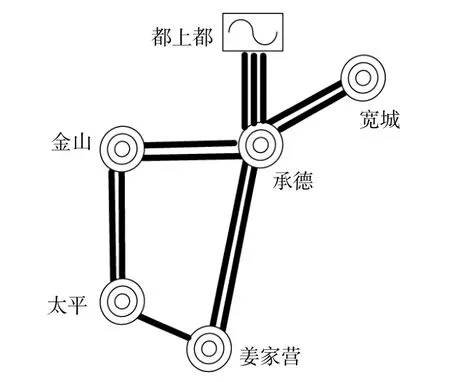
圖3 都上都電廠送出系統結構圖Fig.3 The structure diagram of the transmission system of the Dushangdu power plant
電網等值確定了電網暫態能量模型,因此在PSD-BPA機電暫態仿真平臺中須要校驗等值電網的正確性。表1給出了都上都電廠送出系統潮流參數。
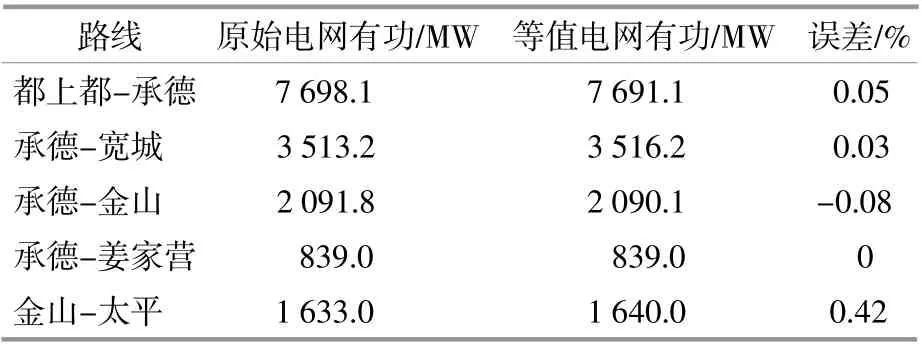
表1 都上都電廠送出系統參數Table 1 Duhangdu power plant transmission system parameters
在不同情況下,系統控制前后的電壓波形如圖4、圖5所示。系統無功波動情況如圖6所示。控制后頻率波動情況如圖7所示。
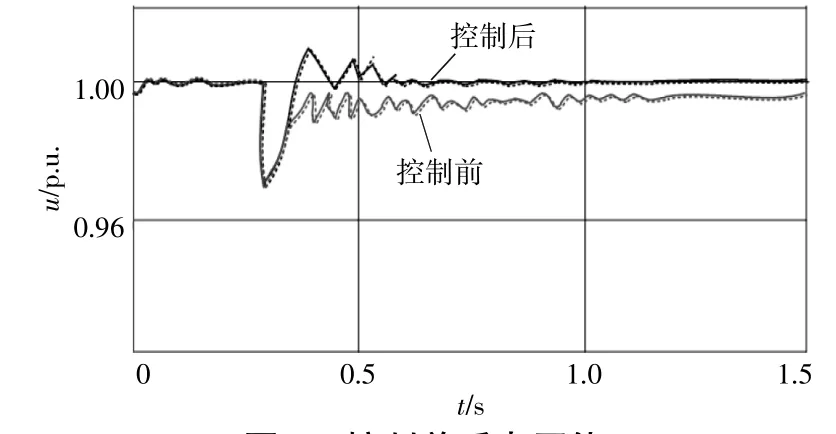
圖4 控制前后電壓值Fig.4 Voltage value before and after control
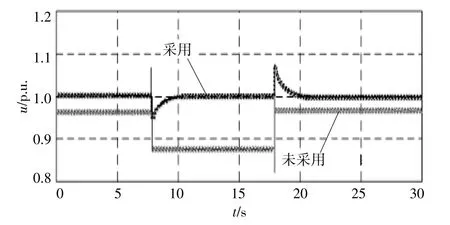
圖5 動態控制電壓仿真結果Fig.5 Dynamic control voltage simulation result
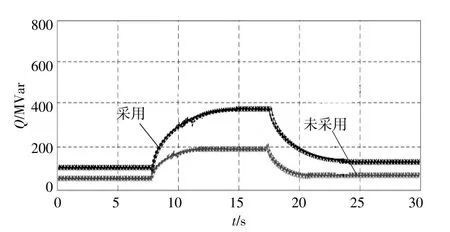
圖6 動態控制無功仿真結果Fig.6 Dynamic control reactive power simulation results
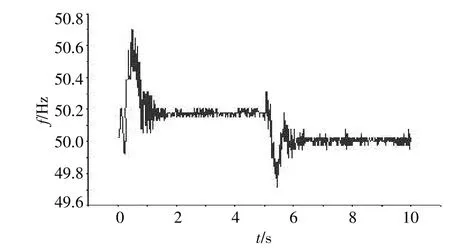
圖7 控制后頻率波動情況Fig.7 Frequency fluctuation after control
圖8為系統控制前后的功角特性曲線。分析控制前后系統的功角特性曲線可知,在A1>A2時系統失穩,此時須采取安控措施。設控制措施為切機,切機量為ΔPd。基于等面積定則,機組加速面積等于機組減速面積。通過以上分析可得,采用多能源送端電網暫態能量平衡快速魯棒控制后,通過調節熱網和氣網的管道壓力,使故障期間的轉子加速能量減小。故障切除后,轉動慣量越大,故障切除角越小,機組減速能量越大,切機量也相應減小,可以減少在電力系統故障情況下的切機容量。
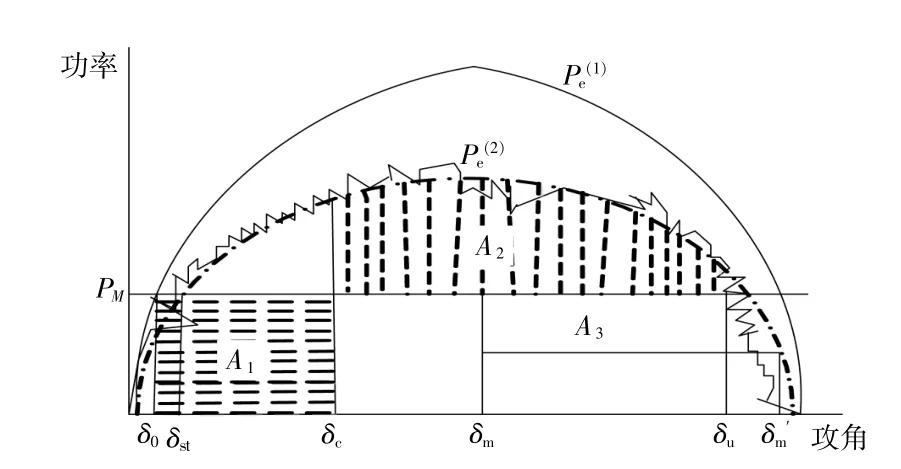
圖8 控制后系統功角特性曲線Fig.8 System power angle characteristic curve after control
5 結論
本文所提出的送端電網暫態能量動力學模型,能夠較好地反映送端系統暫態過程中的系統慣性參數、功率控制系統時間延遲參數和等值電源轉子運動參數間的非線性對應關系。
考慮可再生能源、多源儲能和多能源負荷接入后送端電網阻尼的時變特性及其變化的確定性,提出了送端電網暫態功率魯棒控制器模型,能夠有效兼顧實時功率控制過程中的控制量最優解的魯棒性問題。
針對單廠送出和送端電網算例的仿真結果表明,本文提出的送端系統暫態能量控制模型,在功率控制精度和實時控制時效方面具有較好的性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19