虛擬同步發電機參數自適應控制策略
2021-12-28 04:59:32程國棟邵宣王貴峰
可再生能源 2021年12期
程國棟,邵宣,王貴峰
(1.中國礦業大學徐海學院,江蘇徐州 221008;2.中國礦業大學電氣與動力工程學院,江蘇徐州 221008;3.江蘇師范大學電氣工程及自動化學院,江蘇徐州 221008)
0 引言
隨著配電網中可再生能源的發電占比逐年提高,大量逆變器接入到電力系統中,這導致電力系統的總慣性下降、穩定性受到嚴重影響[1],[2]。利用虛擬同步發電機(Virtual Synchronous Generator,VSG)控制技術,可以為微電網提供類似同步發電機的慣性和阻尼特性,進而維持逆變器輸出頻率和功率的穩定[3],[4]。
VSG并不是真正物理上的機械慣量,但VSG的虛擬慣量和阻尼靈活可變,可采用參數自適應的控制策略來提高VSG的運行性能。文獻[5]提出一種自適應慣性控制策略,根據不同的工況實現功率調節與頻率調節之間的平衡,同時給出了參數的設計原理,確定自適應的范圍。文獻[6]考慮外界頻率波動對系統的沖擊,分析配電網頻率突變時,不同轉動慣量對逆變器輸出頻率的影響,設計合適的慣性控制策略,實現頻率的快速響應。文獻[7]在多VSG并聯的微電網中提出改進的轉動慣量自適應控制,有效抑制了并聯VSG帶來的功率振蕩,但其并未考慮阻尼變化對系統的影響。文獻[8]提出一種自適應控制策略,在運行過程中使系統保持最佳阻尼比,用以優化超調以及響應時間等指標,進而抑制頻率和功率的振蕩,提高了VSG的動態性能。文獻[9]提出一種使用模糊邏輯的自適應虛擬慣性控制方法,以保證系統在高滲透條件下運行所需的頻率穩定性。該方法根據有功功率和系統頻率偏差自動調整虛擬慣性常數,避免了參數選擇不當,實現了快速的慣性響應。文獻[10]根據負載擾動情況改變轉動慣量的大小,進而調節系統的頻率響應,但其并未給出轉動慣量的具體表達式。
上述文獻均只對轉動慣量進行自適應控制,沒有考慮阻尼系數的影響。本文提出一種基于模糊控制的雙參數自適應控制策略。通過分析VSG的功角特性,確定轉動慣量和阻尼系數的選取原則;根據角速度偏差量及其變化率來確定模糊規則,實現轉動慣量和阻尼系數的自適應調節,進而抑制頻率和有功功率的波動,提高系統的動態性能。
1 虛擬同步發電機的數學模型
虛擬同步發電機的控制框圖如圖1所示。系統主控部分為三環控制。外環為VSG功率控制環,是VSG控制的核心部分,由頻率控制和電壓控制組成,提供電壓和頻率支撐;內環為雙閉環控制,用以穩定VSG的輸出電壓,提高系統抗擾性能,加快電流動態響應。將雙閉環輸出的電壓信號傳送到SVPWM調制環節,便得到開關管的驅動信號。

圖1 虛擬同步發電機的控制框圖Fig.1 Control block diagram of VSG
VSG的頻率控制可通過轉子運動方程實現。為便于逆變器的控制,對同步發電機的模型進行降階處理,采用經典二階模型對虛擬同步發電機進行建模,可得轉子運動方程為
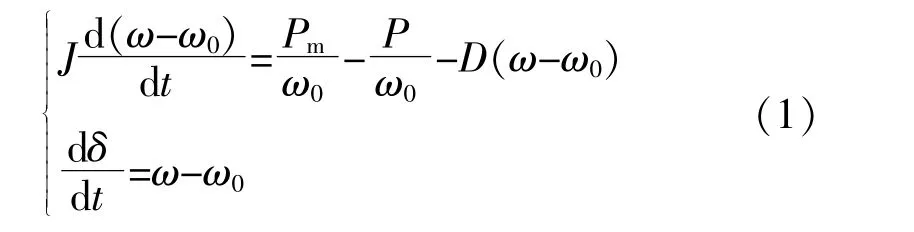
式中:J為轉動慣量;ω為轉子角速度;ω0為額定角速度;Pm為VSG機械功率;P為VSG輸出功率;D為阻尼系數;δ為VSG的功角。
轉子運動方程通過模擬轉矩的不平衡來實現轉子的加速和減速,虛擬轉動慣量J可抑制頻率的波動,阻尼系數D可增強系統的抗擾能力。根據同步發電機的無功調壓特性,可得到VSG的電壓控制方程為

式中:Um為系統電壓參考值;U0為額定電壓;Q為VSG的無功功率;Qref為無功功率指令值;Kq為無功下垂系數。
在下垂控制基礎上,加入勵磁調節控制,用于維持VSG輸出電壓的穩定,勵磁調節控制方程為

式中:E為勵磁電動勢;ki為積分系數;U為VSG實際輸出電壓。
由式(1)和式(3)可得VSG的控制框圖,如圖2所示。
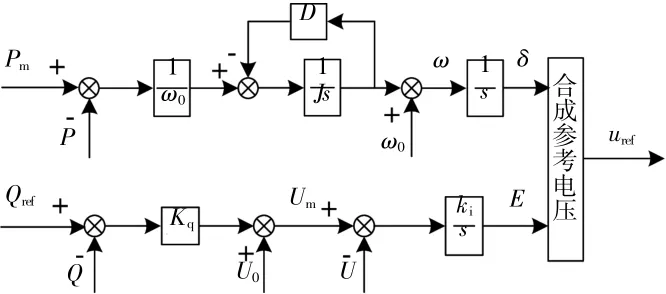
圖2 VSG的頻率和電壓控制Fig.2 Frequency and voltage control in VSG
由圖2可知,在逆變器控制策略中加入同步發電機的特性,可提高微電網輸出頻率和電壓的穩定性。
2 轉動慣量和阻尼系數對VSG的影響
VSG技術不僅具有調頻、調壓特性,還能克服電力電子設備帶來的缺陷,使微電網具備轉動慣性和阻尼。然而,VSG的外特性受轉動慣量J和阻尼系數D這兩個關鍵參數的影響較大,為了獲得更好的運行性能,須對上述兩個關鍵參數進行詳細分析。
2.1 關鍵參數對輸出功率的影響
根據圖2可得VSG有功環的控制框圖,如圖3所示。
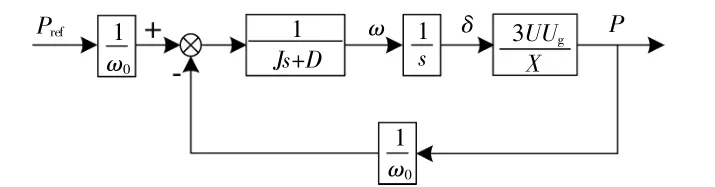
圖3 有功環控制框圖Fig.3 Control block diagram of active power loop
圖中:Pref為參考有功功率;P為VSG輸出有功功率;U為VSG輸出電壓;Ug為電網電壓;X為系統等效阻抗。
由圖3可得VSG有功環的閉環傳遞函數為

根據式(4)可得VSG輸出有功功率的單位階躍響應曲線,如圖4所示。

圖4 有功功率階躍響應曲線Fig.4 Step response curve of active power
由圖4可知,當J增大時,有功功率的超調量增大,動態響應慢,功率變化速度相對平緩,調節時間相應變長,功率出現振蕩現象,系統的穩定性受到一定的影響。當D變大時,系統阻尼增加,功率的超調量逐漸減小,動態響應慢,上升時間增大,功率波動逐漸減小,穩定性得以提高。
2.2 關鍵參數對輸出頻率的影響
根據圖3可得參考有功功率Pref與輸出頻率ω之間的傳遞函數為

根據式(5)可得VSG輸出頻率的階躍響應曲線,如圖5所示。
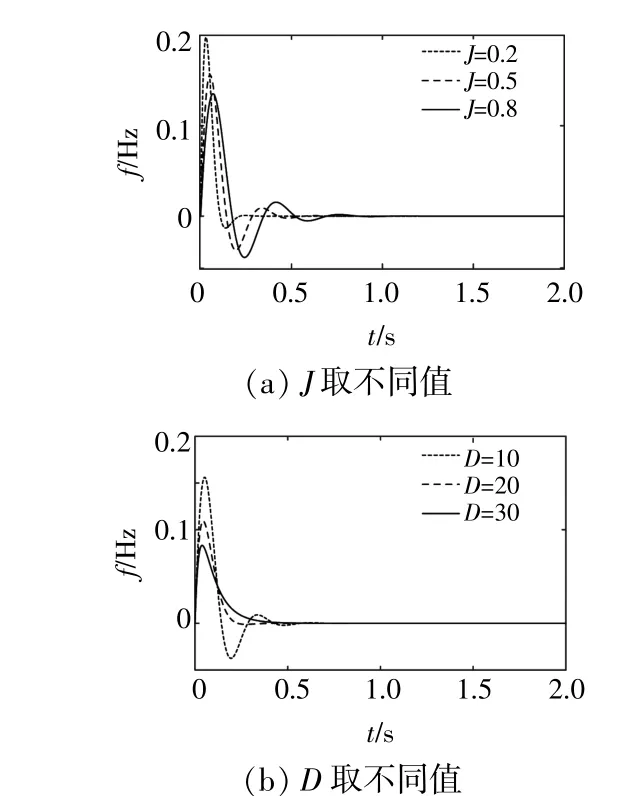
圖5 頻率階躍響應曲線Fig.5 Step response curve of frequency
由圖5可知,當J增大時,VSG的輸出頻率變化較為平緩,響應速度變慢,可有效抑制頻率突變,但同時也帶來頻率的振蕩。當D變大時,頻率的超調量減小,動態響應時間變長,可見D的增大能夠有效減小頻率的波動。
VSG有功環的動態性能由J和D這兩個關鍵參數共同決定,且對輸出功率和輸出頻率的影響又相互制約[11]。增大J可使頻率變化較為平緩,但增大了功率的超調量,并且加劇了系統的振蕩。減小J雖能夠減弱功率的振蕩,實現功率的快速響應,但會造成頻率的突變,帶來過大的超調。較大的D能夠減小功率及頻率的振蕩,使之變得平緩,但削弱了系統的動態響應速度。因此,針對系統特性之間的矛盾,應綜合考慮各項性能指標,折中選取J和D。
3 參數自適應控制策略
3.1 擾動狀態下的功角特性
VSG功角特性曲線如圖6所示。
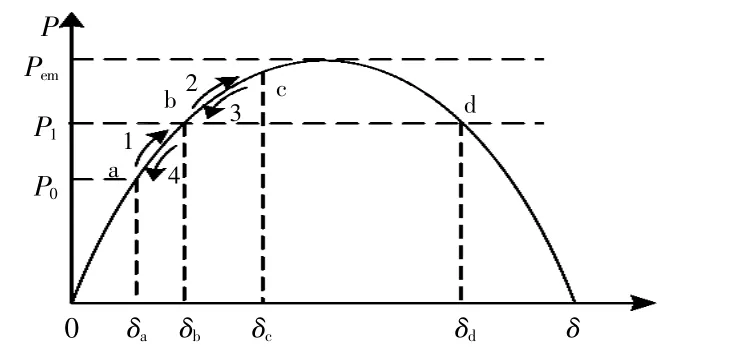
圖6 VSG功角特性曲線Fig.6 Power-Angle characteristic curve of VSG
當功率參考值從P0階躍到P1時,系統的穩態工作點從a點變化到b點。這一變化過程并不是瞬間完成的,而是存在一個逐漸衰減的振蕩過程。圖7為VSG暫態振蕩曲線。

圖7 VSG暫態振蕩曲線Fig.7 Transient oscillation curve of VSG
當系統處于第1階段(0~t1)時,VSG的給定功率大于輸出功率,促使角頻率加速增長,即dω/dt>0,且此時角頻率始終大于額定值。為防止頻率出現較大的超調而過多偏離額定值,應增大慣量J和阻尼D的取值,以減緩角頻率的變化率及其偏移量。
當系統處于第2階段(t1~t2)時,VSG的輸出功率大于給定值,角頻率到達峰值后開始向額定頻率回調,該階段的角頻率仍大于額定值,但變化率始終小于0,即dω/dt<0,角頻率處于減速階段。此過程應減小慣量J以減緩功率的超調,同時可以加速角頻率的回調,使其盡快回到額定值。同時在角頻率偏移較大時稍微增大阻尼D,以達到進一步減小頻率偏移的效果。
階段3和階段4的過程類似于階段1和階段2。由此可以根據角頻率的偏差量及其變化率來分別確定慣量J和阻尼D的選取原則,如表1所示。
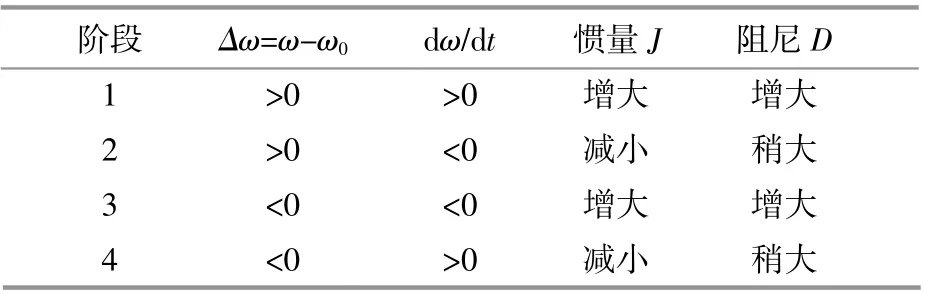
表1 慣量J和阻尼D的選取原則Table 1 Principles of selecting inertia J and damping D
3.2 基于模糊控制的參數自適應算法
根據表1中慣量J和阻尼D的選取原則,利用模糊控制實現上述兩個參數的自適應變化,使系統具有較強的魯棒性和自適應性。
假設VSG輸出頻率為ω,偏差e=ω-ω0,偏差的變化率ec=de/dt。將連續域的e和ec轉換成離散域N=[-n,-n+1,…,-1,0,1,…,n-1,n],n為離散量的檔數,本文取n=6。設在連續域內輸入量的取值范圍為[xL,xH],則轉換到離散域的量化因子可以表示為
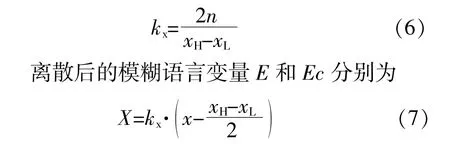
式中:x為連續域的e或ec;X為離散論域E或Ec。
將得到的模糊語言變量進行區間劃分,分別記為:{PL,PS,ZE,NS,NL}。其中,PL和PS分別代表偏離正方向較大和較小的數值;ZE表示沒有偏差;NS,NL分別代表偏離負方向較小和較大的數值。考慮到頻率偏差量E過0時有較高的區分度,此處選擇三角形隸屬度函數,其他位置均選用較為平滑的高斯型隸屬度函數。
輸入值的隸屬度函數如圖8所示。根據表1中參數的選取原則,制定模糊控制規則,如表2,3所示。
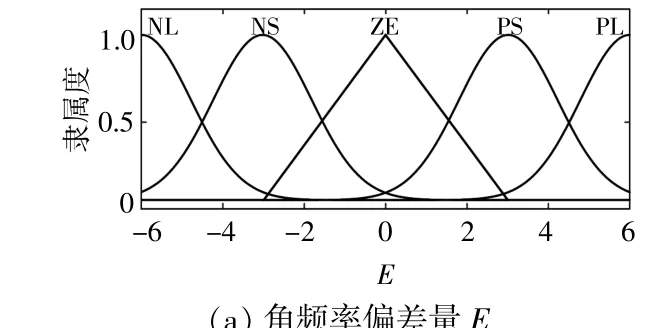

圖8 輸入量的隸屬度函數Fig.8 Membership function of the input
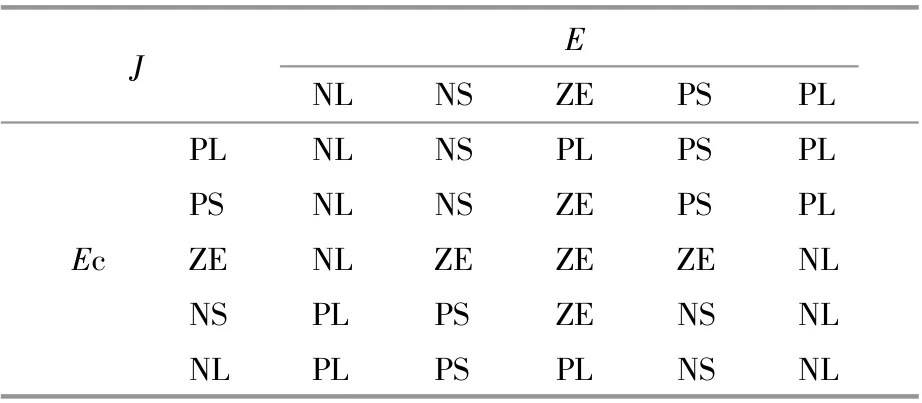
表2 慣量J的模糊控制規則表Table 2 Fuzzy control rule of inertia J

表3 阻尼D的模糊控制規則表Table 3 Fuzzy control rule of damping D
模糊控制下J的輸出呈現雙向發展,變化靈活,可設置大的初始慣量來抑制頻率的波動;D的輸出變化較為平緩,避免了阻尼過大而造成的響應緩慢的問題。由此可得輸出量的模糊集合,輸出量選擇適用性強、計算簡單的三角形隸屬度函數,如圖9所示,利用重心法,對輸出模糊集合求取加權平均值,論域仍為[-6,6],得到最終輸出量U。
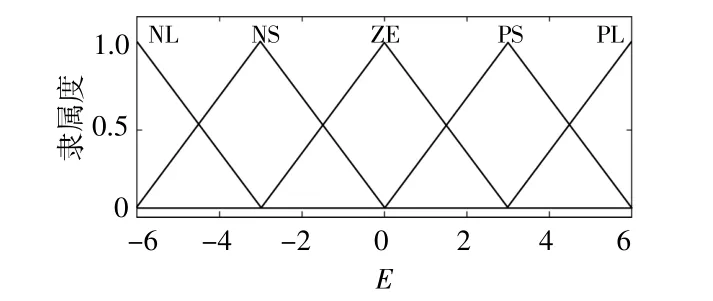
圖9 輸出量的隸屬度函數Fig.9 Membership function of the output
設自適應參數的調節范圍為[yL,yH],將最終的模糊輸出量U轉換到連續域下的量化系數為

自適應參數y的輸出表達式為

式中:y為慣量J或阻尼D的自適應變化取值。
根據前文分析,可得基于模糊控制的慣量J和阻尼D的自適應控制框圖,如圖10所示。

圖10 基于模糊控制的自適應控制框圖Fig.10 Adaptive control diagram based on fuzzy control
4 仿真與實驗驗證
4.1 仿真驗證
為驗證基于模糊控制的參數自適應算法的可行性,在Simulink中搭建VSG模型進行仿真分析,仿真參數如表4所示。

表4 仿真參數Table 4 Simulation parameters
仿真工況為VSG并網運行,啟動時有功參考值為5 kW,2 s突增到10 kW,4.5 s再降為5 kW。對固定參數控制和參數自適應控制兩種方式進行對比仿真,結果如圖11,12所示。
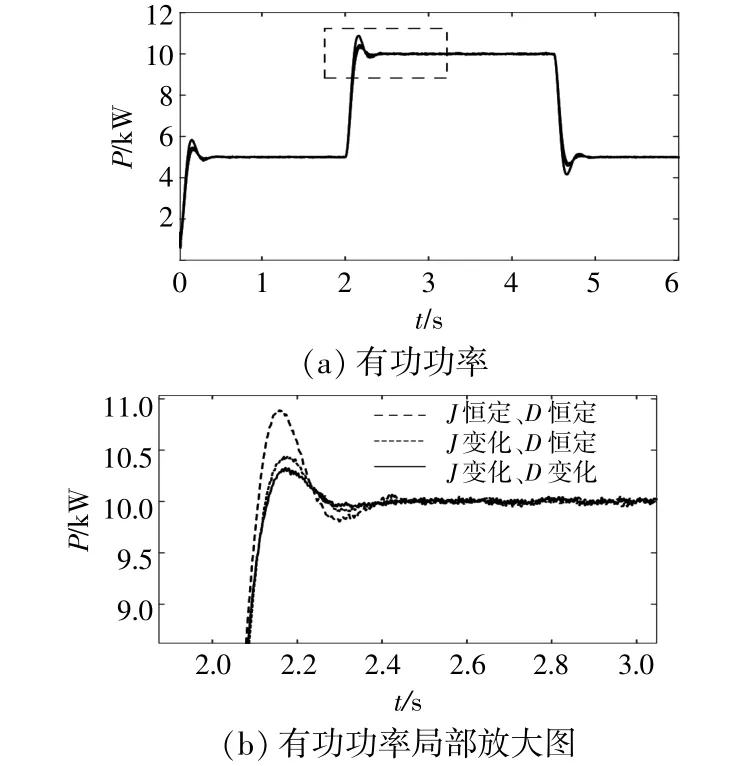
圖11 不同控制方式下的有功功率波形Fig.11 Active power waveforms under different controls

圖12 不同控制方式下的頻率波形Fig.12 Frequency waveforms under different controls
由圖11,12可得,參數固定不變時,有功和頻率均具有較大的超調,調節時間較長,系統有較大波動;僅采用慣量J自適應控制時,系統超調量降低,調節時間變短,系統波動得到抑制;采用慣量J和阻尼D雙參數自適應控制時,控制效果得到了進一步提高,驗證了基于模糊控制的參數自適應控制策略的有效性。
圖13為模糊控制自適應參數J和D的變化情況。
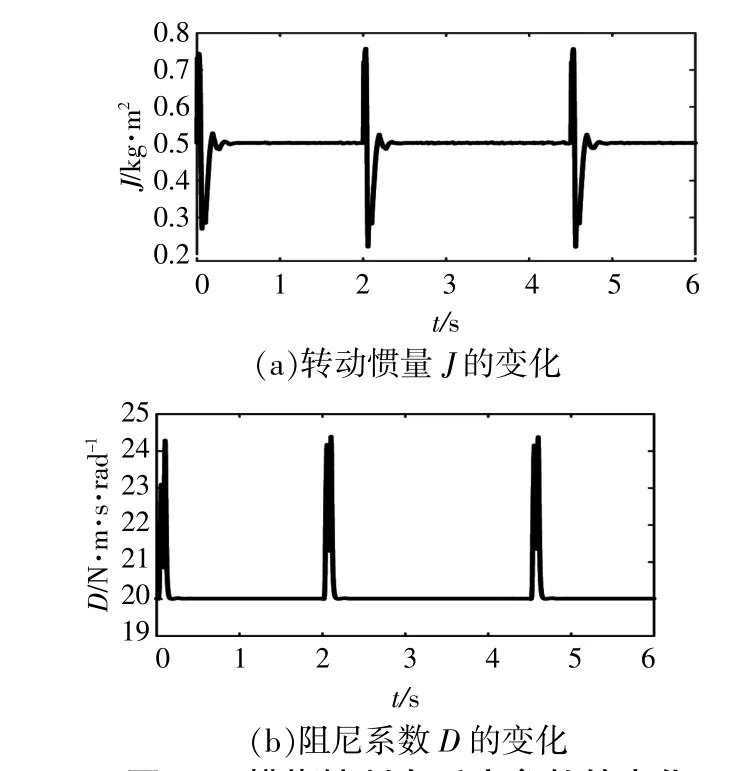
圖13 模糊控制自適應參數的變化Fig.13 Variation of adaptive parameters when fuzzy control is used
由圖13可以看出,參數J和D均連續變化,J以初始值為中心呈雙向變化,D的變化范圍相對較小,以免阻尼過大而減緩響應。系統發生振蕩時,J和D均增大,從而減小波動帶來的影響;頻率恢復時,J和D均減小以加快該過程。
4.2 實驗驗證
在基于TMS320F28335的LC型并網逆變器平臺上對參數自適應控制進行實驗驗證。t0時刻有功功率參考值增加1.5 kW,t1時刻減少0.75 kW,實驗結果如圖14所示。

圖14 不同控制方式下的有功功率波形Fig.14 Active power waveforms under different controls
由圖14可以看出,采用慣量J的自適應控制要比固定參數控制的功率變化更為平緩,而采用慣量J和阻尼D雙參數自適應控制的動態性能又優于前兩種控制方式,其超調更小,調節時間更短,有效抑制了有功功率波動。
5 結論
針對傳統虛擬同步發電機固定參數無法兼顧快速性和穩定性的特點,本文建立其數學模型,分析了轉動慣量和阻尼系數對虛擬同步發電機特性的影響。從功角特性出發,確定轉動慣量和阻尼系數的選取原則,進而提出一種基于模糊控制的虛擬同步發電機參數自適應控制策略,兼顧了系統動態調節的快速性和穩定性,同時增強了系統的魯棒性。通過與傳統固定參數控制策略的對比仿真和實驗,驗證了所提控制策略的可行性和有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30