基于滑模觀測信息的電動(dòng)舵機(jī)自適應(yīng)終端滑模控制
2021-12-23 11:19:06梁海波
導(dǎo)彈與航天運(yùn)載技術(shù) 2021年6期
關(guān)鍵詞:系統(tǒng)
李 浩,梁 婕,王 尚,梁海波,王 瑞
(北京航天自動(dòng)控制研究所,北京,100854)
0 引 言
舵機(jī)是飛行器控制系統(tǒng)中的關(guān)鍵部件,其性能的優(yōu)劣決定了飛行控制效果的好壞。根據(jù)動(dòng)力源的不同,飛行控制系統(tǒng)可以采用液壓舵機(jī)、氣動(dòng)舵機(jī)和電動(dòng)舵機(jī)。電動(dòng)舵機(jī)體積小、質(zhì)量輕,結(jié)構(gòu)簡單,維護(hù)方便,在飛行控制系統(tǒng)中得到廣泛應(yīng)用[1]。由于飛行過程中飛行器參數(shù)會(huì)發(fā)生變化,電動(dòng)舵機(jī)的負(fù)載會(huì)隨飛行條件的變化而改變,因此其控制器必需能夠適應(yīng)參數(shù)變化和負(fù)載擾動(dòng)的影響,才能取得良好的動(dòng)、靜態(tài)性能。
滑模控制對(duì)不確定參數(shù)、擾動(dòng)具有很強(qiáng)的魯棒性,是控制不確定系統(tǒng)的一種有效方法[2]。終端滑模控制通過引入終端吸引子來改變系統(tǒng)的收斂特性,可以實(shí)現(xiàn)狀態(tài)的有限時(shí)間收斂[3,4]。文獻(xiàn)[5]提出一種非奇異快速終端滑模面,解決了奇異性問題,但對(duì)具體應(yīng)用對(duì)象其控制律不易實(shí)現(xiàn)。文獻(xiàn)[6]提出一種不確定二階系統(tǒng)的快速終端滑模控制方法,可實(shí)現(xiàn)系統(tǒng)狀態(tài)的有限時(shí)間收斂。上述控制方法中采用高增益來抑制系統(tǒng)不確定性的影響,保守性較強(qiáng)。文獻(xiàn)[7]將自適應(yīng)控制與魯棒控制相結(jié)合,對(duì)參數(shù)進(jìn)行在線估計(jì),降低了控制保守性,但只能保證誤差漸近收斂。文獻(xiàn)[8]采用復(fù)合自適應(yīng)律進(jìn)行參數(shù)估計(jì),按照估計(jì)值設(shè)計(jì)復(fù)合自適應(yīng)非奇異終端滑模控制(Adaptive Nonsingular Fast Terminal Sliding Mode Control,ANFTSMC),可實(shí)現(xiàn)輸出誤差有限時(shí)間收斂,但在構(gòu)造自適應(yīng)律時(shí)需要使用系統(tǒng)狀態(tài)的導(dǎo)數(shù)信息。
本文在舵機(jī)控制中設(shè)計(jì)自適應(yīng)終端滑模控制器,利用滑模觀測信息來構(gòu)造自適應(yīng)律,具有與一般復(fù)合自適應(yīng)律相似的參數(shù)估計(jì)特性,但在設(shè)計(jì)自適應(yīng)律時(shí)不需要系統(tǒng)狀態(tài)的導(dǎo)數(shù),可實(shí)現(xiàn)系統(tǒng)穩(wěn)定控制與誤差有限時(shí)間收斂。
1 問題描述
電動(dòng)舵機(jī)作為一種位置伺服機(jī)構(gòu),主要由控制器、直流電機(jī)、減速器和位置傳感器構(gòu)成。一般直流電機(jī)電感較小,可忽略電感對(duì)系統(tǒng)動(dòng)態(tài)特性的影響,舵機(jī)的數(shù)學(xué)模型為[1]

式中δ為舵偏角;u為電機(jī)電樞電壓;J為轉(zhuǎn)動(dòng)慣量;KM為電壓-力矩轉(zhuǎn)換系數(shù);B為阻尼系數(shù);Af為摩擦力矩;hf為可選參數(shù),一般hf選為較大的正數(shù);ML為負(fù)載力矩;Δ為系統(tǒng)未建模動(dòng)態(tài)。
令x=[x1,x2]T=[δ,δ˙]T,則可得系統(tǒng)狀態(tài)表達(dá)式為
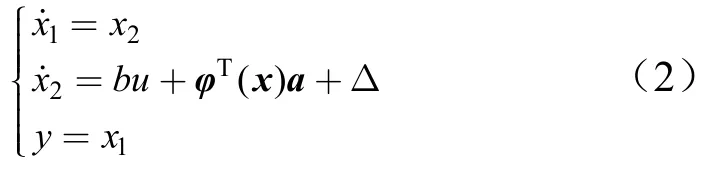
式中x=[x1,x2]T為系統(tǒng)狀態(tài)向量;y為系統(tǒng)輸出;b為控制增益,;a=[B/J,Af/J,ML/J]T;φ(x)=[-x2,-tanh(hfx2),-1]T。
a和b不確定,但滿足以下假設(shè):
假設(shè)1:系統(tǒng)參數(shù)和干擾有界,即:
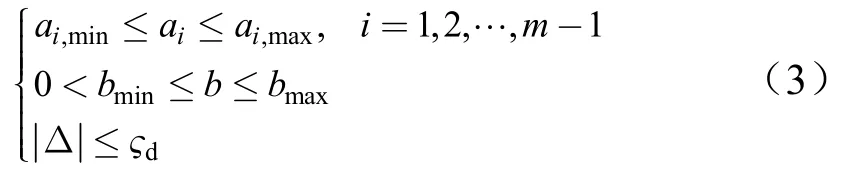
式中ai,min,ai,max,bmin,bmax和?d已知。
假設(shè)2:系統(tǒng)參考軌跡xd連續(xù),且其一階導(dǎo)數(shù)和二階導(dǎo)數(shù)有界并可得。
控制的目標(biāo)是式(2),在滿足假設(shè)1和假設(shè)2時(shí),設(shè)計(jì)控制器,使系統(tǒng)輸出誤差e1=y-xd收斂為0,并且保證系統(tǒng)中所有信號(hào)有界。
2 控制器設(shè)計(jì)
對(duì)于式(2),設(shè)計(jì)如下非奇異快速終端滑模面[5]:

對(duì)σ2求導(dǎo),可得[5]:

設(shè)計(jì)如下控制律:
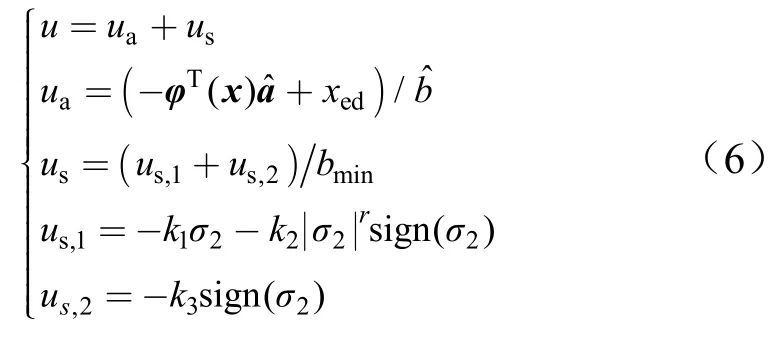
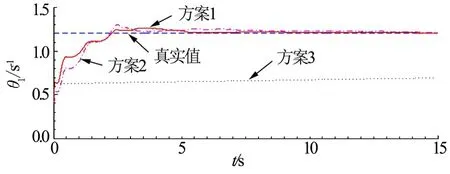
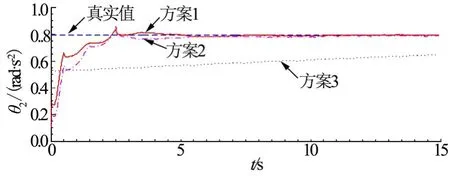
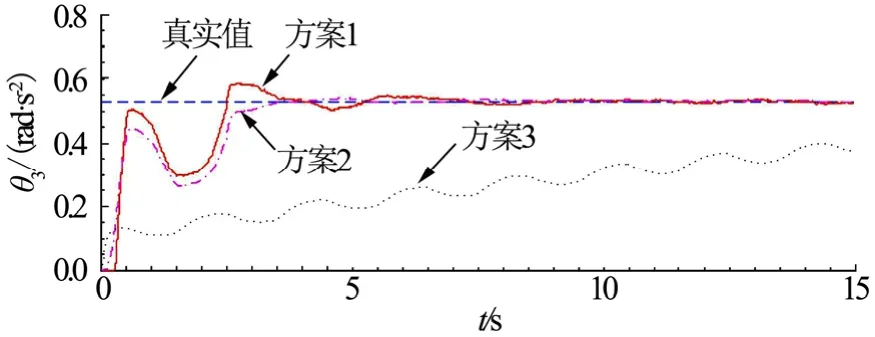
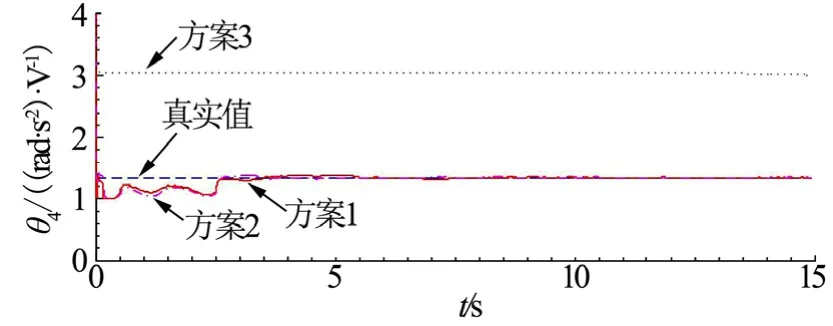
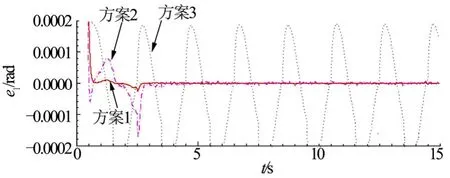
式中ua為自適應(yīng)項(xiàng);us為魯棒項(xiàng);k1>0;k2>0;,0 將式(6)代入式(5),可得: 對(duì)式(2),定義回歸表達(dá)式如下: 由式(5)、式(8)可得: 設(shè)計(jì)自適應(yīng)律為 若忽略Δ,則有: 因此,式(10)的自適應(yīng)律中包含參數(shù)估計(jì)誤差信息,與一般復(fù)合自適應(yīng)律類似,但未使用系統(tǒng)狀態(tài)的導(dǎo)數(shù)。式(10)中若不使用veq,而使用文獻(xiàn)[8]中定義的預(yù)測誤差ef,則可獲得一般復(fù)合自適應(yīng)律。 定理1:對(duì)于對(duì)象(2),采用式(6)和式(10)組成的控制器時(shí),有: a)閉環(huán)系統(tǒng)穩(wěn)定; b)若滿足持續(xù)激勵(lì)條件:式中α>0,I為m×m的單位矩陣,則系統(tǒng)狀態(tài)有限時(shí)間收斂。 證明之前,先給出如下引理: 引理1[11]:,Γ為正定對(duì)角陣,有: 引理2[12,13]:假設(shè)m1>0,m2>0,0 引理3[12]:若連續(xù)正函數(shù)V(t)在時(shí),≥0,其中α1>0,α2>0,0<μ<1,則,?t≥t1,有V(t)=0。 證明: a)選取系統(tǒng)Lyapnov函數(shù)為V=V1+V2,V1=,,則, 根據(jù)引理1可知: 則: 則, 定義vd為 則vd≥0,并且有,由式(14)可知: 由式(20)和式(22)可知,當(dāng)σ2≠0時(shí),,滿足Lyapnov穩(wěn)定性條件。 b)當(dāng)Ψ(x,u)滿足式(15)的持續(xù)激勵(lì)條件時(shí),有: 其中, 下面分3種情況證明。 1)σ2≠0且。 當(dāng)σ2≠0且時(shí),由式(18)、式(19)知: 式(25)中,有: 以及: 由于0 由式(26)、式(27)可得: 根據(jù)定理3可知,V有限時(shí)間收斂,即,當(dāng)t≥t1時(shí),V(t)=0。而當(dāng)V=0時(shí),V1=0,則σ2=0。因此,當(dāng)σ2≠0且+cσ1≠0時(shí)系統(tǒng)狀態(tài)在有限時(shí)間內(nèi)到達(dá)滑模面。 2)σ2≠0且+cσ1=0。 當(dāng)σ2≠0且σ˙1+cσ1=0時(shí),由式(4)知σ2=σ1,。令,將式(6)代入式(8),有: 當(dāng)σ2>0時(shí),由于,因此有-k3′sign(σ2)+Δ=-k3′+Δ<0,則, 由于0 3)σ2=0。 當(dāng)σ2=0時(shí),系統(tǒng)狀態(tài)在滑模面上。再由定理2知,當(dāng)系統(tǒng)狀態(tài)到達(dá)滑模面之后,系統(tǒng)狀態(tài)有限時(shí)間收斂至平衡點(diǎn)。 從上述3種情況的分析可知,系統(tǒng)狀態(tài)在有限時(shí)間內(nèi)到達(dá)滑模面,而系統(tǒng)狀態(tài)到達(dá)滑模面之后,系統(tǒng)狀態(tài)在有限時(shí)間內(nèi)收斂到平衡點(diǎn)。 按照第2節(jié)中的步驟設(shè)計(jì)基于滑模觀測信息的ANFTSMC。作為比較,還設(shè)計(jì)了一般復(fù)合自適應(yīng)律的ANFTSMC[8]和一般自適應(yīng)律的ANFTSMC。各控制器參數(shù)如下: a)方案1:采用滑模觀測信息的ANFTSMC。 控制律中:β=0.1,c=10,γ=r=13/15,k1=100,k2=100,k3=4,kv=20;自適應(yīng)律中:Γ1=[1,1.5,1,1.5]T,Γ2=Γ3=[1,2.5,2,2]T。為了降低抖振,采用tanh(h·)代替sign(·),h在控制器中為900,而在觀測器中為50。 b)方案2:采用一般復(fù)合自適應(yīng)律的ANFTSMC。 控制律中參數(shù)與方案1一致,自適應(yīng)律中:Γ1=[2,1,2.5,1]T,Γ2=Γ3=[1,1,1.5,1]T,τ1=0.01。 c)方案3:采用一般自適應(yīng)律的ANFTSMC。 在方案2中,令Γ2=Γ3=[0,0,0,0]T則可得采用一般自適應(yīng)律的ANFTSMC,但需從新選擇Γ1,這里Γ1=[50,600,750,2800]T。除Γ1、Γ2和Γ3,其余參數(shù)與方案2中相同。 圖1至圖4為系統(tǒng)參數(shù)的估計(jì)值,采用常規(guī)自適應(yīng)律的ANFTSMC,雖然能夠保證參數(shù)估計(jì)值保持在已知范圍內(nèi),但很難逼近真值,而采用滑模觀測信息的ANFTSMC和采用復(fù)合自適應(yīng)律的ANFTSMC,參數(shù)估計(jì)值則能較快地收斂到真值。從圖中可以看出,方案1和方案2在參數(shù)估計(jì)方面具有相似的性能。 圖1 參數(shù)θ1的估計(jì)值Fig.1 Estimation ofθ1 圖2 參數(shù)θ2的估計(jì)值Fig.2 Estimation ofθ2 圖3 參數(shù)θ3的估計(jì)值Fig.3 Estimation ofθ3 圖4 參數(shù)θ4的估計(jì)值Fig.4 Estimation ofθ4 圖5為系統(tǒng)跟蹤誤差,方案1和方案2中參數(shù)能夠較快地收斂到真值,系統(tǒng)誤差收斂速度加快,系統(tǒng)穩(wěn)態(tài)誤差也大大減小,既可以提高參數(shù)估計(jì)的精度,又可以加快系統(tǒng)的響應(yīng)速度。 圖5 系統(tǒng)跟蹤誤差Fig.5 System Tracking Error 本文通過構(gòu)造滑模觀測器,使觀測狀態(tài)到達(dá)觀測器的滑模面,通過低通濾波器提取出觀測器的等效輸入信號(hào),該等效信號(hào)包含系統(tǒng)參數(shù)估計(jì)的誤差信息,然后將該等效信號(hào)應(yīng)用于自適應(yīng)律中,該自適應(yīng)律具有與一般復(fù)合自適應(yīng)律相似的參數(shù)估計(jì)特性,但不需要系統(tǒng)狀態(tài)的導(dǎo)數(shù)。采用該自適應(yīng)律,設(shè)計(jì)了電動(dòng)舵機(jī)的自適應(yīng)終端滑模控制器,實(shí)現(xiàn)了系統(tǒng)穩(wěn)定控制與誤差有限時(shí)間收斂。






3 穩(wěn)定性分析













4 仿真與分析
5 結(jié)束語
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19通信電源技術(shù)(2016年6期)2016-04-20 06:21:32