重復(fù)使用運(yùn)載器著陸滑跑距離估算方法研究
2021-12-23 11:18:54朱如意張春陽(yáng)張?jiān)铝?/span>
導(dǎo)彈與航天運(yùn)載技術(shù) 2021年6期
關(guān)鍵詞:飛機(jī)
朱如意,王 征,張春陽(yáng),張?jiān)铝?/p>
(中國(guó)運(yùn)載火箭技術(shù)研究院,北京,100076)
0 引 言
重復(fù)使用運(yùn)載器在再入返回著陸后要經(jīng)歷地面滑跑段直至停機(jī)。地面滑跑段是飛行任務(wù)剖面重要的組成部分。對(duì)于重復(fù)使用運(yùn)載器而言,其再入返回著陸時(shí)滑跑距離的長(zhǎng)短不僅反映飛行器的性能水平,同時(shí)也影響其他一些因素,比如著陸場(chǎng)選擇或設(shè)計(jì)、是否使用減速傘、控制系統(tǒng)設(shè)計(jì)、起落架系統(tǒng)設(shè)計(jì)等。著陸場(chǎng)跑道的高度會(huì)影響滑跑距離的長(zhǎng)短,在其他條件不變情況下,著陸場(chǎng)跑道高度越高、著陸速度越大,滑跑距離越長(zhǎng);著陸場(chǎng)跑道高度越低、著陸速度越小,滑跑距離越短,對(duì)起落架輪胎的使用壽命越有利,對(duì)于可重復(fù)使用的飛行器而言是利好因素。地面滑跑距離是飛行器著陸性能中最主要的指標(biāo)之一,良好的著陸性能對(duì)飛行器的安全著陸至關(guān)重要。為了滿足滑跑距離的要求,需要研究是否使用減速傘以縮短滑跑距離,是否優(yōu)化起落架剎車裝置,是否優(yōu)化控制系統(tǒng)設(shè)計(jì),這些因素相關(guān)聯(lián),進(jìn)而影響的是飛行器總體設(shè)計(jì)。
目前,滑跑距離的計(jì)算或者分析諸多見于飛機(jī),涵蓋飛機(jī)起飛滑跑距離和跑道長(zhǎng)度、發(fā)動(dòng)機(jī)推力計(jì)算等,鄧楊晨等[1]通過(guò)優(yōu)化方式給出了發(fā)動(dòng)機(jī)的最佳安裝角和飛機(jī)地面滑跑的最佳攻角及前起落架的最佳凸伸量,并確定了飛機(jī)地面滑行過(guò)程中的最短滑跑距離;宋花玉等[2]應(yīng)用人工神經(jīng)網(wǎng)絡(luò)技術(shù)對(duì)飛機(jī)起飛滑跑距離進(jìn)行了研究,給出了基于BP網(wǎng)絡(luò)的飛機(jī)起飛滑跑距離計(jì)算模型,并對(duì)飛機(jī)實(shí)際滑跑距離及其影響因素進(jìn)行了歸一化處理;張志剛等[3]針對(duì)MA60飛機(jī)進(jìn)行了高原機(jī)場(chǎng)起飛性能研究,結(jié)合MA60飛機(jī)的特性,計(jì)算出起飛滑跑距離等參數(shù)值;在發(fā)動(dòng)機(jī)推力計(jì)算和滑跑長(zhǎng)度計(jì)算方面,宋花玉[4]利用數(shù)值理論計(jì)算了飛機(jī)起飛滑跑距離,研究了發(fā)動(dòng)機(jī)瞬時(shí)推力的確定方法,提出以發(fā)動(dòng)機(jī)推力曲線為基礎(chǔ),通過(guò)拉格朗日插值確定未知推力的算法;黃文靜等[5]針對(duì)裝有反推力裝置的某型飛機(jī),給出了著陸滑跑距離向標(biāo)準(zhǔn)條件換算的方法。許震宇等提出了地效飛行器或水上飛機(jī)水面起飛滑跑距離估算方法,在基本運(yùn)動(dòng)方程中引入了機(jī)身浸濕面積與滑行速度成負(fù)斜率線性關(guān)系的假設(shè),簡(jiǎn)化起飛距離的計(jì)算過(guò)程,得到發(fā)動(dòng)機(jī)推力與起飛滑行距離之間的關(guān)系曲線[6]。航天飛機(jī)不同架次著陸滑跑距離統(tǒng)計(jì)數(shù)據(jù)可見公開文獻(xiàn)[7],但未涉及滑跑距離計(jì)算方法。對(duì)重復(fù)使用運(yùn)載器、無(wú)動(dòng)力再入飛行器滑跑段模型研究還比較少,對(duì)滑跑距離方法研究也比較少。
重復(fù)使用運(yùn)載器再入及滑跑段無(wú)動(dòng)力,受氣動(dòng)力、風(fēng)、減速傘一系列因素影響,單純應(yīng)用飛機(jī)著陸的經(jīng)驗(yàn)公式,不足以準(zhǔn)確估算飛行器滑跑距離。本文提出一種簡(jiǎn)單易懂的滑跑距離估算方法,在跑道坐標(biāo)系下建立飛行器著陸滑跑估算模型,考慮減速傘和地面風(fēng)影響,研究不同滑跑工況下的滑跑距離估算方法。該滑跑距離估算方法簡(jiǎn)潔、算法易實(shí)現(xiàn),適合工程應(yīng)用。
1 滑跑距離估算模型
可重復(fù)使用運(yùn)載器地面滑跑時(shí)的實(shí)際運(yùn)動(dòng)是一種復(fù)雜的現(xiàn)象,為了使計(jì)算盡量簡(jiǎn)單而不失準(zhǔn)確性,需要進(jìn)行簡(jiǎn)化假設(shè)。在建立著陸滑跑估算模型時(shí)與絕大部分模型一樣,將飛行器視為理想剛體,忽略機(jī)體彈性振動(dòng)的影響。
因?yàn)楸疚牡幕芫嚯x估算采用簡(jiǎn)化算法,是沿著跑道方向開展滑跑距離估算,故選擇在跑道坐標(biāo)系下建立著陸滑跑估算模型,著陸場(chǎng)跑道坐標(biāo)系OdXdYdZd見圖1。飛行器著陸滑跑時(shí)飛行器受力狀態(tài)如圖2所示。
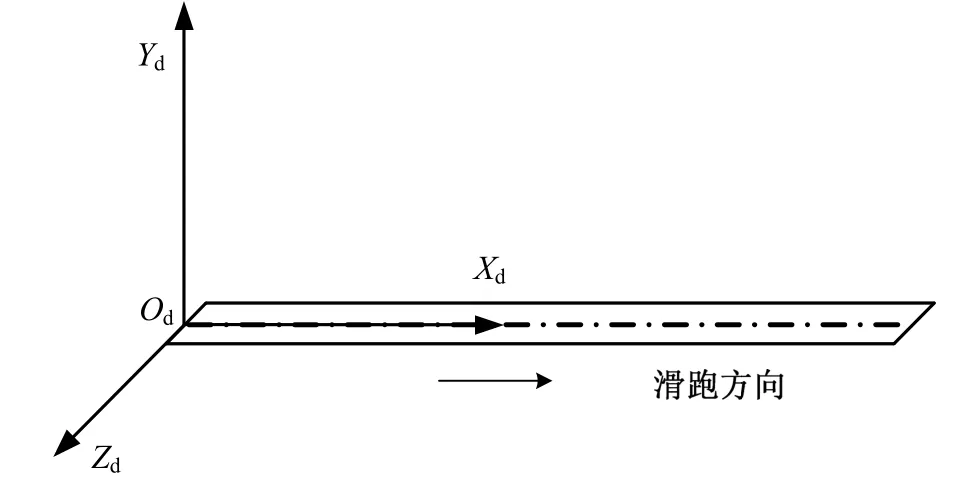
圖1 著陸場(chǎng)跑道坐標(biāo)系Fig.1 The Runway Reference Frame
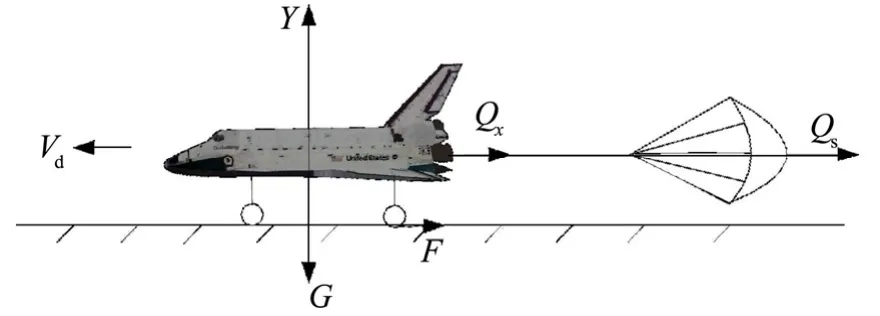
圖2 飛行器受力狀態(tài)Fig.2 The Force State of the Aircraft
減速傘張滿后飛行器著陸滑跑運(yùn)動(dòng)方程為

式中m為飛行器總質(zhì)量;Vd為地速;Qx為氣動(dòng)阻力;Qs為阻力傘拉力;F為地面作用在飛行器上的摩擦力和剎車阻力。
考慮地面風(fēng)的影響,有:

式中Cx,Cy為滑跑時(shí)氣動(dòng)阻力、氣動(dòng)升力系數(shù);CsAs為減速傘特征值;u0為滾動(dòng)摩擦系數(shù);ρ為著陸場(chǎng)空氣密度;A為機(jī)翼參考面積;Fsc為主輪剎車所產(chǎn)生阻力;V為空速。地面風(fēng)會(huì)影響動(dòng)壓,設(shè)定Vw為風(fēng)速,則有:

令:
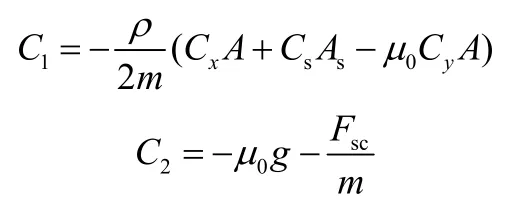
則式(2)可以寫成:

由于

式中L為傘張滿后滑跑距離;順風(fēng)時(shí)Vd=V+Vw,逆風(fēng)時(shí)Vd=V-Vw,本文以順風(fēng)為例。
聯(lián)合式(3)得:

對(duì)式(5)積分后得:

傘開始張滿時(shí)速度為VM(空速),對(duì)應(yīng)滑跑距離L=0,因此可得:

則得:

2 滑跑距離估算方法
2.1 正常滑跑工況
開傘到傘張滿時(shí)段,為簡(jiǎn)化分析,近似認(rèn)為飛行器勻速滑跑,滑跑距離為

式中tM為該時(shí)段時(shí)長(zhǎng)。
傘張滿到開始剎車時(shí)段,飛行器滑跑距離為

式中GV為剎車時(shí)刻的空速;。
開始剎車到拋傘時(shí)段,滑跑距離為

拋傘后滑跑過(guò)程中,當(dāng)飛行器速度達(dá)到順風(fēng)風(fēng)速時(shí),空速為零,此后飛行器不受氣動(dòng)阻力、升力以及減速傘的作用力,水平方向只有摩擦力、剎車產(chǎn)生的阻力作用。
拋傘到飛行器達(dá)到風(fēng)速時(shí)段,滑跑距離為

從空速為零到停機(jī)時(shí)段:

從空速為零到停機(jī)的滑跑距離為

則從開傘到停機(jī)的滑跑距離為

2.2 用傘無(wú)剎車工況
傘張滿到拋傘時(shí)段,飛行器滑跑距離為

拋傘后滑跑過(guò)程中,當(dāng)飛行器速度達(dá)到風(fēng)速時(shí),空速為零,此后飛行器不受氣動(dòng)阻力、升力以及減速傘的作用力,水平方向只有摩擦力作用。
拋傘到飛行器達(dá)到風(fēng)速時(shí)段,滑跑距離為

從空速為零到停機(jī)時(shí)段:
從空速為零到停機(jī)的滑跑距離為

則從開傘到停機(jī)的滑跑距離為

2.3 剎車不用傘工況
為簡(jiǎn)化分析,開傘到開傘失敗信息反饋過(guò)程,近似認(rèn)為飛行器勻速滑跑,滑跑距離為

式中tsb為開傘到開傘失敗信息反饋時(shí)間;V1為該時(shí)段的滑跑速度。
開傘失敗后開始剎車,當(dāng)飛行器速度達(dá)到風(fēng)速時(shí),空速為零,此后飛行器不受氣動(dòng)阻力、升力作用,水平方向只有摩擦力、剎車產(chǎn)生的阻力作用。
開始剎車到飛行器達(dá)到風(fēng)速時(shí)段,滑跑距離為

式中VG0為該工況下的開始剎車速度(空速),不同于正常滑跑時(shí)開始剎車速度。
從空速為零到停機(jī)時(shí)段:
從空速為零到停機(jī)的滑跑距離為

則從開傘(失敗)到停機(jī)的滑跑距離為

3 結(jié)束語(yǔ)
重復(fù)使用運(yùn)載器滑跑段無(wú)動(dòng)力,受氣動(dòng)力、風(fēng)、減速傘等一系列因素影響,運(yùn)動(dòng)規(guī)律較復(fù)雜。本文側(cè)重從工程應(yīng)用和初期總體設(shè)計(jì)的角度,提出一種簡(jiǎn)單易懂的滑跑距離估算方法,在跑道坐標(biāo)系下建立飛行器著陸滑跑估算模型,考慮減速傘和地面風(fēng)影響,研究不同滑跑工況下的滑跑距離估算方法。該估算方法簡(jiǎn)潔、算法易實(shí)現(xiàn),適合工程應(yīng)用。
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33