變電站設備狀態智能識別系統技術研究
2021-12-22 11:33:56李新海徐寶軍范德和曾令誠肖星邱天怡袁拓來
電氣傳動 2021年24期
李新海,徐寶軍,范德和,曾令誠,肖星,邱天怡,袁拓來
(廣東電網有限責任公司中山供電局,廣東 中山 528400)
變電站作為電網中的能源轉換中心,是電力系統的重要組成部分,其設備狀態的有效識別是確保電網安全和穩定的重要基礎,也關系著電氣設備工作人員及操作人員的生命安全。
目前變電站設備狀態識別主要采用人工核對方式,存在以下問題:1)作業效率低。雖然變電站已普遍采用無人值班模式[1-3],但遠方遙控進行設備倒閘操作時,設備現場仍需安排工作人員按照操作進度逐項確認設備狀態,降低了倒閘操作的工作效率。2)工作質量不高。變電站內設備數量眾多,倒閘操作后的設備狀態核對、設備定期巡檢或專項巡檢的設備狀態核對等作業任務的工作量較大、工作重復率高,容易使工作人員產生疲倦,導致工作質量不穩定,造成設備狀態的漏判和誤判[4-6]。3)巡檢人員的安全難以保障。巡檢的設備一般都是高壓帶電設備,如遇設備短路故障導致的爆炸將引發人身安全事故[7-8]。
近年來,隨著我國視頻監控技術及信息技術的大力發展,變電站遙視監控系統已得到普遍應用[9-11],但這類遙視系統目前還是主要作為輔助工具[11],提供對現場的實時監控畫面預覽,缺少對視頻內容的自動分析功能,設備狀態仍然依靠人工核對。針對該問題,眾多研究者開始研究變電站智能視頻識別技術,以實現設備狀態的智能識別[12-16]。如文獻[13]提出了一套基于視頻圖像技術的變電站智能化應用系統,但該系統僅用于輔助變電站綜合自動化保護系統(簡稱綜自系統)的刀閘狀態視頻校核,無法識別開關的狀態,效果有限。文獻[14]提出了一種基于圖像處理技術的視頻智能分析系統研究和實現方案,通過霍夫變換直線檢測、cvBlob目標跟蹤等圖像處理和特征提取技術對視頻流進行分析,實現了設備狀態的自動識別功能,但該系統與SCADA系統相互獨立、無數據交互,無法實現兩個系統的信息聯動,自動化程度不高。文獻[15]提出了一種基于霍夫森林算法的開關設備檢測及狀態識別方法,通過圖像處理算法檢測與定位開關設備、判別開關狀態,但未能結合變電站現有綜合自動化系統且缺乏實際運行實例。
針對上述問題,本文提出并研制了變電站設備狀態智能識別系統,通過與變電站SCADA系統的信息交互,實現了變電站開關、刀閘設備狀態的遠程智能識別。該系統可在變電設備倒閘操作、定期巡檢、專項巡檢以及日常設備狀態監視中代替人工巡檢開關、刀閘設備狀態,及時發現并預警設備狀態隱患,提高巡檢效率和質量,降低運行人員的勞動強度,保障人身及設備安全。文章在介紹了變電站設備狀態智能識別系統的結構設計及功能設計的基礎上,詳細闡述了開關狀態綜合判斷、刀閘狀態綜合判斷、智能巡檢和視頻聯動等關鍵技術,最后通過500 kV文山變電站的實例運用,驗證了該系統的有效性。
1 變電站設備狀態智能識別系統結構和功能設計
1.1 系統結構設計
變電站設備狀態智能識別系統結構如圖1所示,該系統由智能巡檢監控平臺、智能圖像識別服務器、視頻服務器、監視終端等部分組成。

圖1 變電站設備狀態智能識別系統結構圖Fig.1 Structural diagram of intelligent recognition system for equipment status in substation
智能巡檢監控平臺主要負責實現巡檢視頻監控管理,包括視頻監控匯聚、信令控制管理、流媒體轉發、遠程巡視及操作配置實現、報警管理、與SCADA系統聯動、圖像識別告警接收處理、電子地圖等功能。
智能圖像識別服務器主要負責對開關、刀閘等設備的分合狀態進行遠程智能圖像識別,通過采集開關分合位置指示牌、刀閘拐臂位置上專項加裝的指示盤等設備圖像進行關鍵特征點比對,從而完成對現場開關、刀閘分合狀態結果的輸出。如果開關、刀閘發生異位或三相位置不對應等情況,則自動推送報警信息,同時聯動攝像機抓拍、錄像。
視頻服務器主要負責控制監視終端、緩存攝像頭拍攝的視頻圖像;將監視終端抓拍的圖片、邊緣計算攝像頭識別的設備狀態反饋至智能巡檢監控平臺及智能圖像識別服務器。
監視終端主要包括卡片攝像機、白光云臺攝像機、紅外筒型攝像機等,主要負責不同環境下設備圖像拍攝及視頻錄制,并通過光纖通信將視頻及圖像數據傳輸至視頻服務器。
變電站設備狀態智能識別系統的智能巡檢監控平臺、智能圖像識別服務器、視頻服務器等設備通過專用以太網進行數據傳輸,變電站設備狀態智能識別系統部署在變電站電力二次系統的管理信息大區的安全區Ⅲ,與位于電力二次系統的生產控制大區安全區Ⅰ的SCADA系統通過正向隔離裝置和反向隔離裝置實現數據的傳輸[16]。
1.2 系統功能設計
變電站設備狀態智能識別系統工作流程圖如圖2所示。設備狀態智能識別系統將從SCA?DA系統接收的信號按報文重要性分成設備異常告警信號、設備狀態變位信號、設備遙控預置命令報文等不同優先級,并以此開展設備狀態識別的特殊巡檢并將結果信息通過反向隔離裝置反饋至生產控制大區安全區Ⅰ的SCADA系統。如設備狀態智能識別系統未從SCADA系統接收到任何任務,則優先開展自定義巡檢任務,如無自定義巡檢任務則按周期計劃開展定期巡檢并生成巡檢報告。
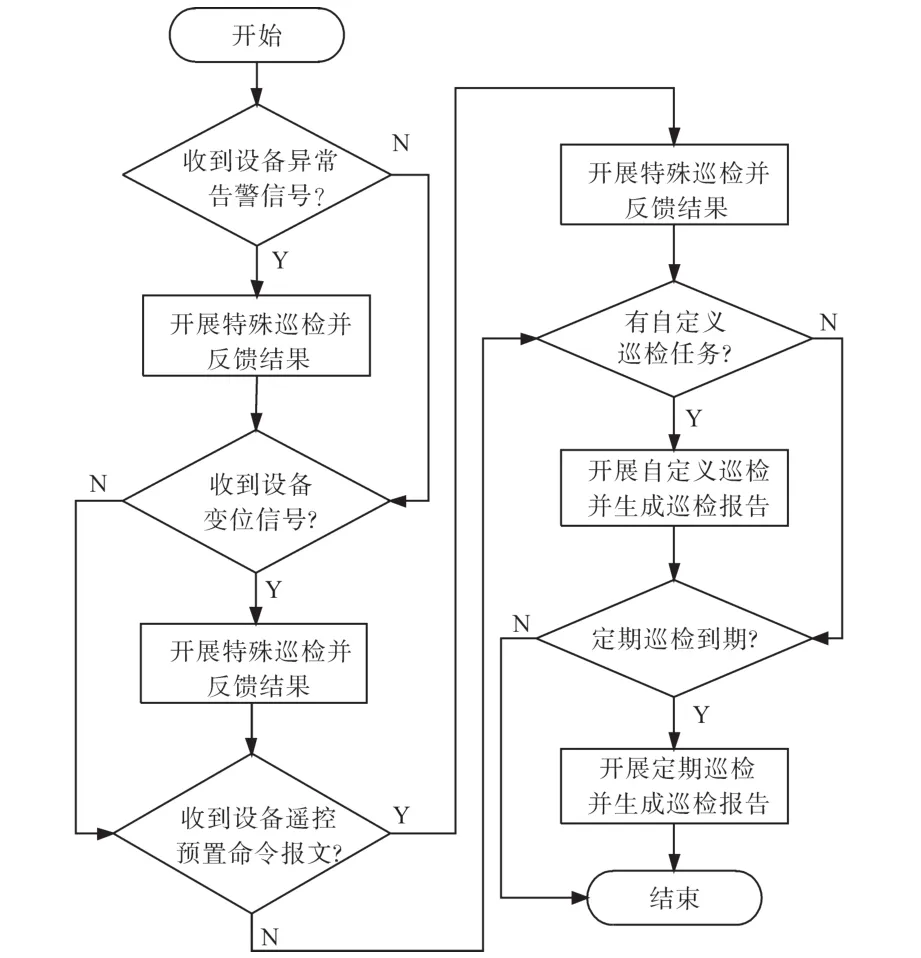
圖2 變電站設備狀態智能識別系統工作流程圖Fig.2 Workflow diagram of intelligent recognition system for equipment status in substation
變電站設備狀態智能識別系統主要實現以下功能:
1)設備狀態智能識別功能。其主要針對變電站開關、刀閘等設備狀態進行智能圖像識別,通過開關、刀閘等設備關鍵特征點比對,完成對現場開關、刀閘等監視對象的分合閘位置的自動識別。在設備遙控預置操作時,該系統可將相關設備的狀態識別結果反饋給SCADA系統,并將設備的相關視頻輸出至智能巡檢監控平臺的視頻監視窗口;在設備狀態變位后,自動獲取設備的圖像信息并智能判斷設備狀態與遙控指令是否一致,同時將結果反饋至SCADA系統。
2)設備狀態智能巡檢功能。其主要實現設備日常運行狀況的智能巡檢,主要有定期巡檢、自定義巡檢、特殊巡檢等3種巡檢方式。定期巡檢按用戶定制間隔時間周期開展;自定義巡檢按用戶需求個性化定制開展;特殊巡檢用于設備出現異常、遙控操作、設備狀態變位時由設備狀態智能識別系統自動開展,并將結果反饋至SCADA系統,同時聯動攝像機抓拍、錄像,實現事前預警、事中跟蹤、事后查詢功能,為工作人員調整設備運維檢修策略提供依據。
3)系統管理功能。其主要實現歷史任務查詢、報告查詢、視頻展示、告警、歷史告警記錄統計分析等。
2 變電站設備狀態智能識別系統關鍵技術
2.1 開關狀態綜合判斷技術
變電站設備狀態智能識別系統主要采集開關位置遙信、開關遙測數據、智能圖像識別服務器基于圖像識別的開關位置等數據綜合判斷開關狀態。其中開關位置遙信為站端SCADA系統采集的開關分合閘位置;開關遙測數據為站端SCADA系統采集的開關三相電流或電壓,其電流取自本間隔電流互感器,其電壓取自本間隔電壓互感器或母線電壓互感器;智能圖像識別服務器利用單點多框檢測器(single shot multibox detector,SSD)圖像處理算法[17-18],通過分析開關在分閘位置、合閘位置時指示牌的不同特征信息識別開關狀態。
SSD網絡結構模型如圖3所示,首先建立批量開關圖像訓練樣本集并導入到SSD網絡基礎卷積層、輔助卷積層、預測卷積層,通過計算損失函數的位置誤差與置信度誤差更新SSD網絡結構模型參數,反復訓練,確定開關分合位置圖像識別SSD網絡結構模型。其次,將開關圖像通過SSD網絡結構模型定位圖像中開關分合位置指示牌區域,并識別開關分合位狀態。
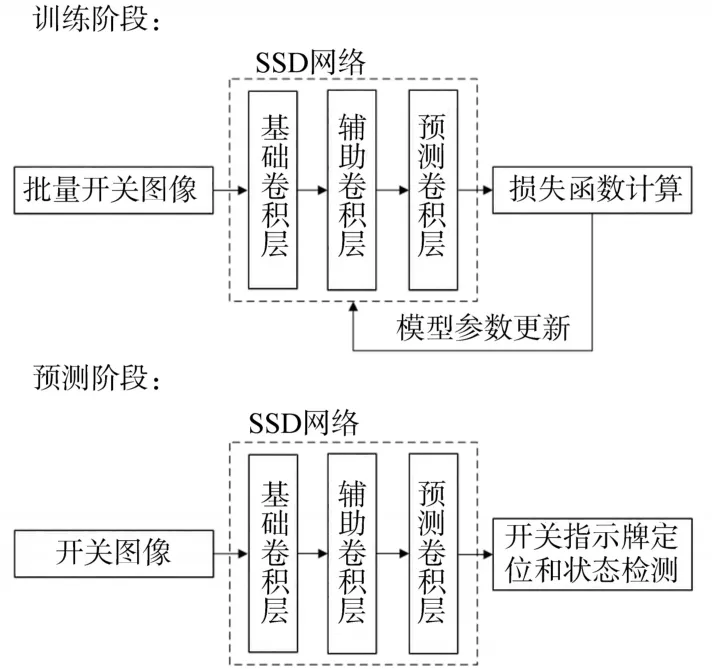
圖3 基于SSD的開關狀態識別算法網絡結構Fig.3 Network structure of switch status identification algorithm based on SSD
開關狀態綜合判斷邏輯圖如圖4所示。當開關位置遙信由合變分、智能圖像識別服務器識別的開關位置為分位且滿足“三相電流由有到無、母線電壓由有到無、線路電壓由有到無”中的任一條件,則確認開關位置為分位。當開關位置遙信由分變合、智能圖像識別服務器識別的開關位置為合位且滿足“三相電流由無到有、母線電壓由無到有、線路電壓由無到有”中的任一條件,則確認開關位置為合位。如以上開關分合位置判別結果不一致則報開關位置異常,提醒工作人員到現場檢查消缺,避免開關分合不到位導致電力安全事故發生。
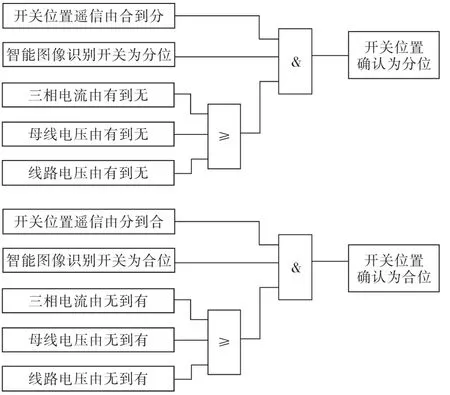
圖4 開關狀態綜合判斷邏輯圖Fig.4 Logic diagram of comprehensive judgment of switch status
2.2 刀閘狀態綜合判斷技術
變電站設備狀態智能識別系統主要采集刀閘位置遙信、智能圖像識別服務器識別的刀閘位置等數據綜合分析確定刀閘狀態。其中刀閘位置遙信為站端SCADA系統采集的刀閘分合閘位置;智能圖像識別服務器則利用圖像處理算法,通過分析刀閘在分閘位置、合閘位置時不同特征信息識別刀閘分合狀態。
針對敞開式開關設備(air insulated switch?gear,AIS),由于其母線及刀閘裸露,直接與空氣接觸,智能圖像識別服務器通過采集刀閘導電臂及觸頭圖像并采用霍夫變換直線檢測算法[14],對比待檢測圖像與模板圖像,識別刀閘狀態。針對氣體絕緣金屬封閉開關設備(gas insulated switch?gear,GIS),由于其開關、刀閘、接地刀閘等設備或部件全部封閉在金屬接地的外殼中[19],智能圖像識別服務器通過采集刀閘拐臂位置上專項加裝的指示盤圖像、采用SSD算法,定位圖像中刀閘位置指示盤區域,并識別刀閘分合位狀態。
刀閘狀態綜合判斷邏輯圖如圖5所示,當刀閘位置遙信由合變為分且智能圖像識別服務器識別的刀閘位置為分位,則確認刀閘位置為分位;當刀閘位置遙信由分變為合且智能圖像識別服務器識別的刀閘位置為合位,則確認刀閘位置為合位。如以上刀閘分合位置判別結果不一致則報刀閘位置異常,提醒工作人員到現場檢查消缺,避免刀閘分合不到位導致的電力安全事故發生。
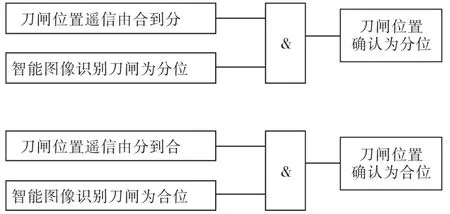
圖5 刀閘狀態綜合判斷邏輯圖Fig.5 Logic diagram of comprehensive judgment of knife switch state
2.3 智能巡檢技術
在設備正常運行時,工作人員可利用變電站設備狀態智能識別系統開展設備智能巡檢,設備狀態智能識別系統支持定期巡檢任務與自定義巡檢任務,其中定期巡檢任務可定制巡檢周期、巡檢內容、巡檢順序等項目,如定制每月20日對變電站全站開關、刀閘的設備狀態巡檢任務,該系統可按照相關巡檢作業指導書進行巡檢并生成報告。自定義巡檢任務可隨時新增設備巡檢任務,如運行人員需對某間隔進行冷備用轉熱備用的操作,可在操作前人工定制一項對該間隔所有開關、刀閘狀態進行巡檢的任務,設備狀態智能識別系統能迅速生成相應巡檢任務,開展巡檢并形成巡檢報告。
當SCADA系統收到站端設備遙控預置、狀態變位、告警、保護動作跳閘等運行狀況信號時,可利用變電站設備狀態智能識別系統聯動復核相關設備狀態,通過SCADA系統與變電站設備狀態智能識別系統的數據交互及多維數據綜合應用,智能巡檢相關設備,為運行人員上報信息、檢修人員消缺、管理人員制定檢修策略提供有力支持,從而實現設備缺陷處理的快速應急響應。以變電站開關、刀閘、變壓器等設備為例,SCADA系統發送給變電站設備狀態智能識別系統的信息內容主要有:開關、刀閘的遙控預置命令,開關、刀閘、接地刀閘等一次設備的變位信號,主變壓器、開關、刀閘等一次設備的非電量告警信號、保護動作跳閘信號等,具體信息如表1所示。如某個設備出現故障,變電站設備狀態智能識別系統將收到SCADA系統轉發的設備故障報文,設備狀態智能識別系統可立即彈出該設備的相關視頻圖像信息,并將智能判斷的設備狀態信息結果反饋至SCADA系統,便于工作人員第一時間掌握故障信息并作出應急處理。
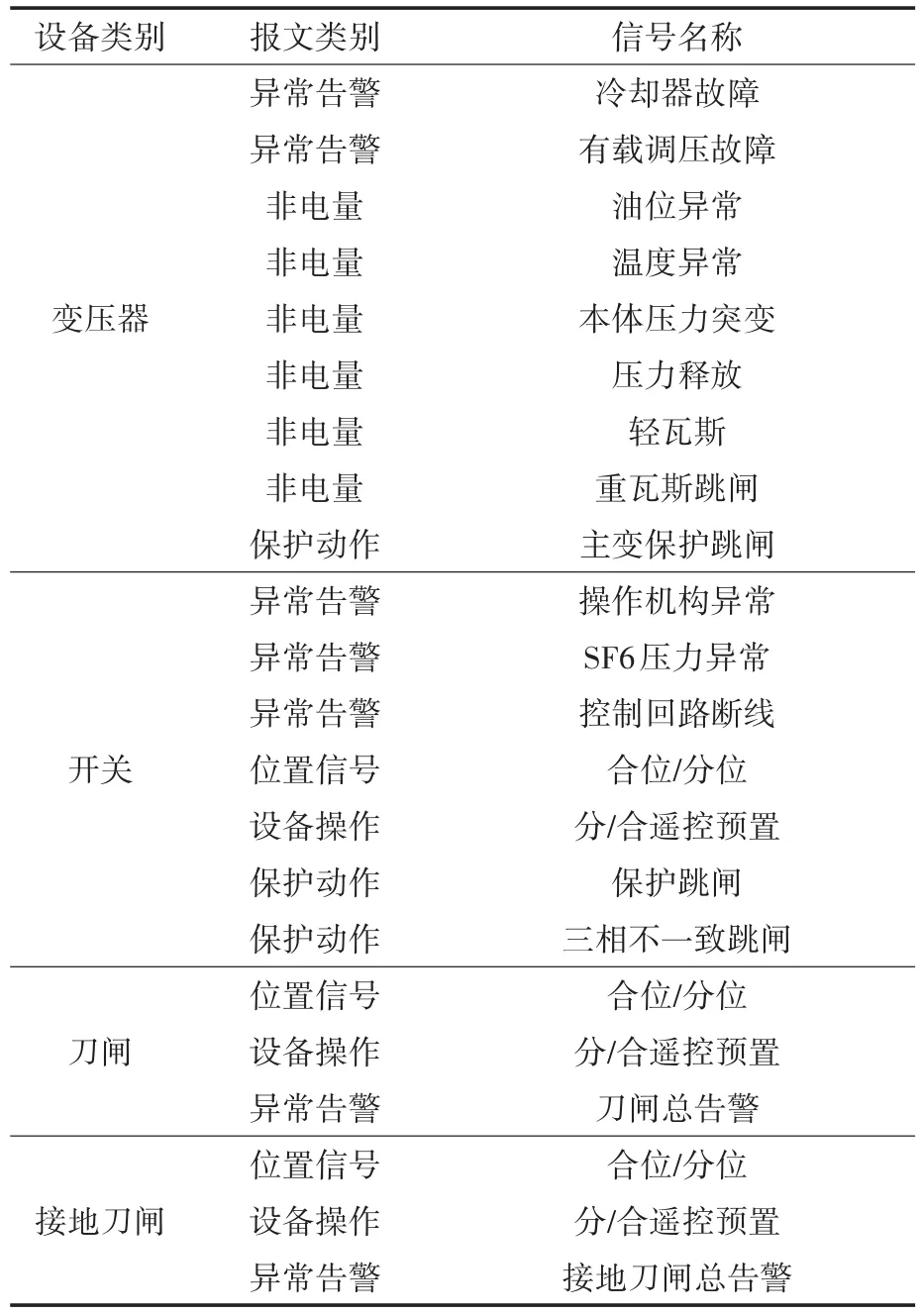
表1 變電站設備狀態智能識別系統聯動信息表Tab.1 Linkage information table of intelligent recognition system for equipment status in substation
2.4 視頻聯動技術
變電站設備狀態智能識別系統支持電力104規約、IEC61850規約與SCADA系統實現數據通信,該系統通過接收SCADA系統的遙控、遙信和遙測數據,實現設備狀態的視頻聯動功能,具體介紹如下:
1)遙控操作視頻聯動。SCADA系統在發出遠方操作指令后,站端的設備狀態智能識別系統立即通過智能巡檢監控平臺控制對應攝像機切換到指定位置,并在視頻監視窗口彈出對應設備視頻;同時該系統將開關、刀閘的狀態識別結果上送至SCADA系統,提醒操作人員開關、刀閘是否分合到位以便遠方操作人員對該設備的操作過程及實時狀態進行全面分析和判斷,保證遙控操作的可靠性驗證,從而實現對設備的遠程可視化操作與控制。
2)遙控操作的智能驗證。當SCADA系統對某個設備發出遙控預置指令后,本系統可對主變壓器、開關、刀閘、接地刀閘等設備的運行數據、設備狀態遙信、設備狀態圖像等信息進行智能分析,判斷設備狀態與遙控指令、遙信結果是否一致,如異常則實時報警。該系統也可作為程序化操作的防誤判據運用,從而實現開關、刀閘設備狀態的多源確認[20]。
3 應用實例
500 kV文山變電站(以下簡稱“文山站”)地處中山市北部,是南方電網首座500 kV戶內GIS變電站,也是南網智能技術應用示范點。本文研制的變電站設備狀態智能識別系統已經成功應用于文山站2#主變三側開關間隔,實現了對文山站2#主變開關、刀閘設備狀態的智能監視與識別。
3.1 系統配置
文山站500 kV設備為戶內GIS設備,220 kV設備為戶內GIS設備,35 kV設備為戶外AIS設備。目前已在文山站2#主變三側開關間隔部署基于機器視覺的變電站設備狀態智能識別系統,主要包括:智能巡檢監控平臺、智能圖像識別服務器、卡片攝像機、白光云臺攝像機、紅外筒型攝像機、交換機、正向隔離裝置和反向隔離裝置等設備,配置情況如圖6所示。
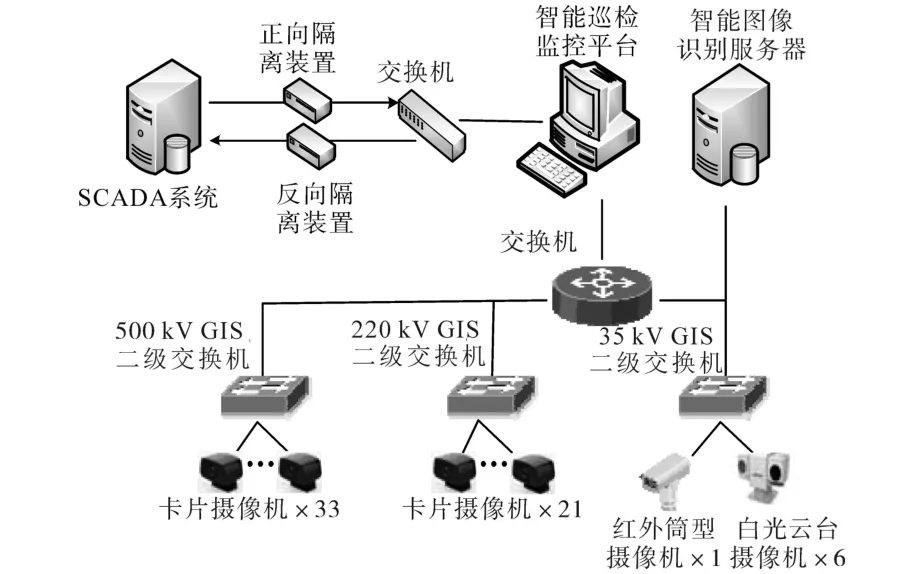
圖6 文山站設備狀態智能識別系統配置圖Fig.6 Configuration diagram of intelligent recognition system of equipment status in Wenshan substation
圖6中監視終端配置如下:
1)2#主變500 kV側開關間隔需安裝33臺攝像機拍攝開關三相位置指示牌、刀閘及接地刀閘拐臂位置指示盤。其中開關每相需配置1臺卡片攝像機,2臺開關共需配置6臺卡片攝像機;刀閘、接地刀閘每相需配置1臺卡片攝像機,4組刀閘及5組接地刀閘共需配置27臺卡片攝像機。
2)2#主變220 kV側開關間隔需安裝21臺攝像機拍攝開關三相位置指示牌、刀閘及接地刀閘拐臂位置指示盤。其中開關每相需配置1臺卡片攝像機,1臺開關共需配置3臺卡片攝像機;刀閘、接地刀閘每相需配置1臺卡片攝像機,3組刀閘及3組接地刀閘共需配置18臺卡片攝像機。
3)2#主變35 kV側開關間隔需安裝1臺紅外筒型攝像機拍攝開關位置指示牌,安裝6臺白光云臺攝像機拍攝刀閘及接地刀閘觸頭實際位置。其中開關每臺需配置1臺紅外筒型攝像機,1臺開關共需配置1臺紅外筒型攝像機;刀閘、接地刀閘每組需配置2臺白光云臺攝像機,1組刀閘及2組接地刀閘共需配置6臺白光云臺攝像機。
通過設備狀態智能識別系統在文山變電站2#主變的安裝應用,有效地實現了2#主變三側開關間隔的智能巡檢功能。
圖7為操作人員在后臺監控機遠方遙控2#主變變高側5 031開關時,設備狀態智能識別系統根據SCADA系統的遙控指令開展智能巡檢的結果反饋,由圖7可知,設備狀態智能識別系統根據5 031開關的遙信位置、遙測電流電壓情況,智能圖像識別的5 031開關位置結果,綜合判斷確認5 031開關為合位。通過系統代替人工定期巡檢變電站內開關的設備狀態,提高了巡檢效率和質量,降低了運行人員的勞動強度。
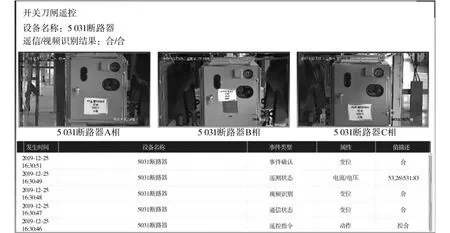
圖7 綜合判斷5 031開關合位界面Fig.7 Diagram of comprehensive judgment of 5 031 switch status
3.2 效果分析
以文山站2#主變停電倒閘操作為例,設備狀態智能識別系統投運前,運行人員對文山站2#主變停電操作需要兩組人員共4人配合,一組人員在設備現場查看設備狀態變位情況,另一組人員在主控室遙控操作,每操作一次設備后必需通知現場人員查看設備狀態切換到位與否,確認后才可進行下一步操作。設備狀態智能識別系統投運后,無需操作人員現場檢查確認設備狀態即可實現系統設備狀態的遠程自動識別,只需一組人員在主控室遙控就可完成設備倒閘操作,節省了變電設備倒閘操作時間,提高了倒閘操作效率。具體倒閘操作時間統計如表2所示。
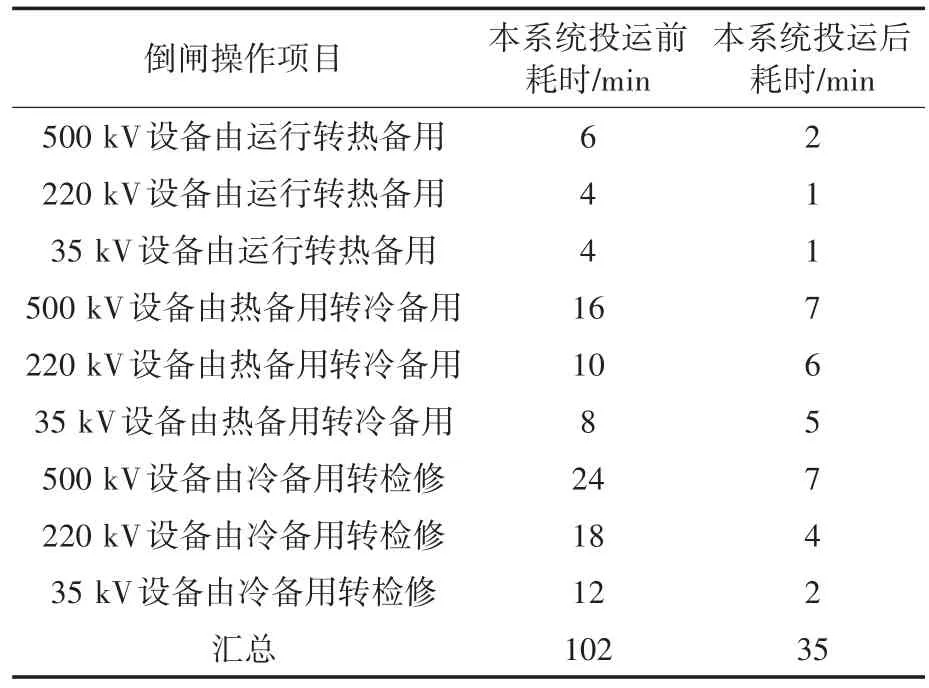
表2 文山站2#主變停電倒閘操作耗時統計表Tab.2 Statistics of outage switching operation time of 2#main transformer in Wenshan substation
由表2中數據可知,安裝設備狀態智能識別系統前,完成2#主變停電倒閘操作需要兩組人員共4人耗時102 min,共計6.8工時;安裝設備狀態智能識別系統后,完成2#主變停電倒閘操作需要一組人員共2人耗時35 min,共計1.17工時,共節省5.63工時,大大節省了人力,提高了工作效率。
此外,在2#主變及三側開關設備發生任一異常時,該系統可啟動智能巡檢,及時推送開關、刀閘設備狀態圖文信息,為變電部門運維檢修提供信息快速報送和檢修決策支持,提高了應急響應能力。同時,該系統投運后,操作人員無需在設備現場檢查開關、刀閘設備狀態,避免了設備短路爆炸造成的人身傷害,保障了人身安全。該系統還實現了定期巡檢與自定義巡檢功能,進一步節省了人力,同時解決了人工巡檢作業引起的巡檢質量不高的問題,提升了變電設備運維質量。
4 結論
本文集成應用開關狀態綜合判斷技術、刀閘狀態綜合判斷技術、智能巡檢技術和視頻聯動技術等關鍵技術,研制了變電站設備狀態智能識別系統,通過與SCADA系統的信息交互,實現了變電站開關、刀閘設備狀態的遠程智能識別。
該系統可在變電設備倒閘操作、日常巡檢中代替人工巡檢開關、刀閘設備狀態,提高了巡檢效率和質量,降低了運行人員的勞動強度,保障了人身安全。
該系統可及時發現開關、刀閘設備狀態隱患并預警通知運維人員檢查消缺,確保了開關、刀閘安全可靠運行,有效地提升了變電站設備智能運維技術水平。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00
