仿生偏振探測技術(shù)及導(dǎo)航傳感器應(yīng)用
2021-12-17 15:32:36褚金奎張鐘元張然于灝尉達(dá)
計(jì)測技術(shù) 2021年5期
褚金奎,張鐘元,張然,于灝,尉達(dá)
(大連理工大學(xué) 機(jī)械工程學(xué)院,遼寧 大連116024)
0 引言
偏振態(tài)作為光的“第四維”信息,具有“弱光強(qiáng)化,強(qiáng)光弱化”的鮮明特點(diǎn)。基于偏振視覺的探測技術(shù),能夠適應(yīng)復(fù)雜光照環(huán)境下的目標(biāo)測量需求,可有效提升探測距離與空間分辨力,成為遙感學(xué)、目標(biāo)識別、機(jī)器視覺測量等領(lǐng)域的研究熱點(diǎn)。
生物學(xué)家通過大量的仿生學(xué)研究發(fā)現(xiàn),在自然界中,多種生物擁有感知環(huán)境偏振光的奇妙能力,并能夠利用偏振光,輔助個(gè)體完成覓食、遷徙及環(huán)境感知等行為[3]。其中,部分昆蟲在漫長的生物進(jìn)化中形成了結(jié)構(gòu)精妙的復(fù)眼器官,能夠通過偏振視覺感知天空環(huán)境下的偏振光場分布,并利用其實(shí)現(xiàn)自主導(dǎo)航定位的功能。受到昆蟲利用偏振視覺進(jìn)行自主導(dǎo)航能力的啟發(fā),國內(nèi)外眾多學(xué)者從仿生偏振探測機(jī)理出發(fā),不斷圍繞昆蟲的偏振敏感特性與感知機(jī)制開展相關(guān)研究,并針對其利用偏振信息進(jìn)行導(dǎo)航的獨(dú)特能力,展開了對仿生偏振光導(dǎo)航機(jī)理與方法的全面研究,模仿昆蟲復(fù)眼結(jié)構(gòu)設(shè)計(jì)開發(fā)了多種類型的偏振光導(dǎo)航傳感器,并逐步探索偏振光導(dǎo)航技術(shù)的應(yīng)用方法。
本文結(jié)合該領(lǐng)域的研究熱點(diǎn),首先從仿生學(xué)研究成果出發(fā),對多種生物的偏振視覺探測機(jī)理進(jìn)行闡述,之后針對自主導(dǎo)航這一關(guān)鍵應(yīng)用方向,分別從天空偏振模式分布研究與偏振光導(dǎo)航傳感器設(shè)計(jì)應(yīng)用兩方面,介紹了國內(nèi)外偏振光導(dǎo)航技術(shù)的研究現(xiàn)狀與發(fā)展方向。
1 基于仿生學(xué)的偏振光探測機(jī)理
生物學(xué)家經(jīng)過長期研究發(fā)現(xiàn),在漫長的生物進(jìn)化過程中,多種昆蟲[1]、遷徙鳥類[2]、海洋生物[3,7]、部分兩棲類[4]、爬行類動(dòng)物[5],都進(jìn)化出了能夠探測環(huán)境偏振光的獨(dú)特能力,并能夠利用偏振光矢量信息,輔助個(gè)體完成覓食、遷徙及環(huán)境感知等行為。1949年,德國學(xué)者Von Frisch K首次發(fā)現(xiàn)蜜蜂能夠感知天空偏振光,并根據(jù)其方向進(jìn)行導(dǎo)航的行為特性[6];1950年,Vowles D M等人又發(fā)現(xiàn)了部分螞蟻對環(huán)境偏振光極化方向的敏感性[7];之后,關(guān)于沙蟻[1]、帝王蝶[9]、蟋蟀[8,10]、蝗蟲[11]、夜行蜣螂等昆蟲[12],候鳥[2]、蝙蝠[13]等飛行生物,翻車魚[3]、螳螂蝦[14]等海洋生物的偏振光敏感特性,也通過大量的生物行為學(xué)、形態(tài)學(xué)研究被陸續(xù)發(fā)現(xiàn)。
進(jìn)一步的解剖學(xué)研究顯示,大多數(shù)擁有偏振視覺,或?qū)ζ窆饷舾械纳?其進(jìn)行偏振探測的“手段”都依賴于復(fù)眼中的部分獨(dú)特結(jié)構(gòu)——背部邊沿區(qū)域(簡稱DRA)內(nèi)按照一定規(guī)則有序排列的小眼,其對偏振光高度敏感。研究人員發(fā)現(xiàn),DRA區(qū)域小眼感桿結(jié)構(gòu)內(nèi)的微絨毛,與一般視神經(jīng)區(qū)域的雜散分布不同,其空間排列具有沿軸向一致,徑向相互垂直的特點(diǎn)[8,15];微絨毛的排布方式對于不同類型、不同極化方向的偏振光具有一定的選擇性,該特性決定了生物對于環(huán)境偏振光具有選擇敏感性。如圖1~3展示了部分生物的DRA小眼結(jié)構(gòu)。沙蟻[8]、蝗蟲[15]等昆蟲的小眼微絨毛多為平面結(jié)構(gòu),且在不同區(qū)域有不同的排列方向,故其對于特定方向的線偏振光敏感;而螳螂蝦的小眼微絨毛為多層疊狀結(jié)構(gòu),除線偏振光外,其還對部分圓偏振光敏感[14]。
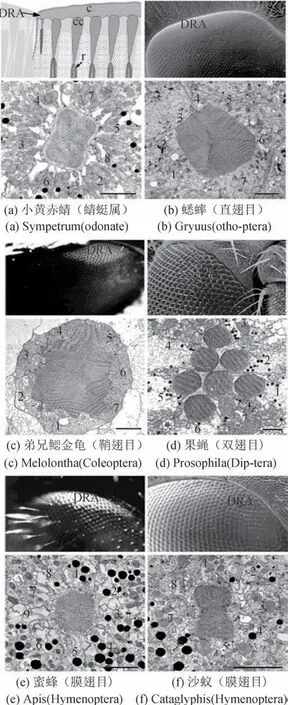
圖1 多種昆蟲的復(fù)眼形貌圖Fig.1 Compound eye morphology of various insects
1988年,Labhart等人解釋了蟋蟀偏振視覺的神經(jīng)作用機(jī)理,通過DRA小眼微絨毛的偏振光矢量正交敏感結(jié)構(gòu),與中樞神經(jīng)層視神經(jīng)葉的偏振對立(簡稱為POL)神經(jīng)元協(xié)同作用,昆蟲構(gòu)成了獨(dú)特的偏振視覺系統(tǒng),且對環(huán)境光強(qiáng)不敏感[8]。進(jìn)一步研究發(fā)現(xiàn),蟋蟀具有三種響應(yīng)方向不同的POL神經(jīng)元,其能夠通過對多類神經(jīng)元信號進(jìn)行處理,獲得自身體軸與太陽子午線的夾角信息,輔助個(gè)體完成飛行導(dǎo)航[10],如圖4所示。
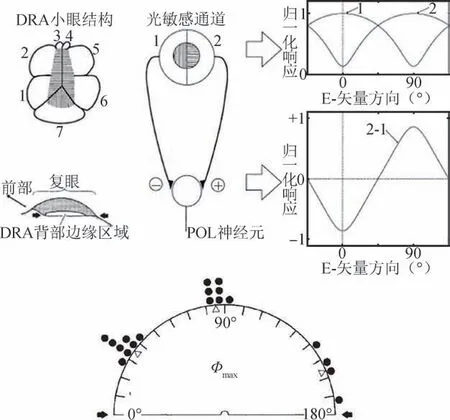
圖4 蟋蟀的POL神經(jīng)元與極化作用響應(yīng)示意圖Fig.4 Schematic diagram of POL neurons and polarization response of crickets
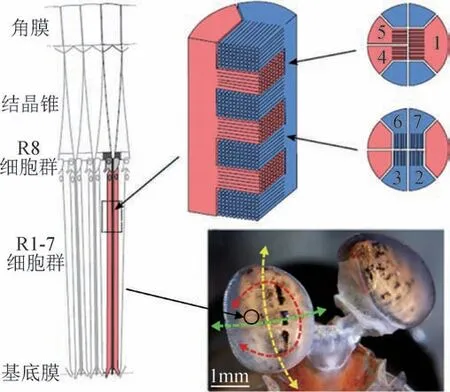
圖3 螳螂蝦的DRA小眼結(jié)構(gòu)圖Fig.3 DRA ommatidium structure of mantis shrimps
之后,研究人員又發(fā)現(xiàn)了多種昆蟲能夠利用偏振視覺,輔助個(gè)體與種群,完成復(fù)雜天氣環(huán)境、不同光照條件下的導(dǎo)航任務(wù)。生物利用天空偏振光導(dǎo)航的奇特能力,引起了相關(guān)研究領(lǐng)域的關(guān)注,研究者逐步嘗試從仿生偏振視覺的導(dǎo)航機(jī)理出發(fā),探尋實(shí)現(xiàn)目標(biāo)自主導(dǎo)航的新手段。
2 面向?qū)Ш降奶炜掌穹植寄J窖芯?/h2>2.1 理想大氣偏振分布模型
16世紀(jì)初,Arago首先發(fā)現(xiàn)了天空光場的偏振現(xiàn)象。1871年,學(xué)者Rayleigh通過對多種大氣粒子散射特性的研究,提出了瑞利散射模型,對這一現(xiàn)象進(jìn)行了解釋[16]。當(dāng)太陽光穿過大氣層時(shí),大氣中的浮游粒子引起入射光的散射和吸收,當(dāng)其直徑遠(yuǎn)小于入射光的波長時(shí)(在大氣中,主要針對N2,CO2,O2,O3等微粒),會(huì)發(fā)生瑞利散射現(xiàn)象。如圖5所示,在晴朗無云的天空下,局部大氣環(huán)境可以采用瑞利散射理論,構(gòu)建大氣偏振光場的分布模型。假設(shè)太陽光散射次數(shù)為單次,且散射光為線偏振光,通過在地理坐標(biāo)系下觀測位置、太陽位置與觀測者的空間幾何關(guān)系,建立了基于瑞利散射的大氣偏振分布模型,計(jì)算獲得全天空的偏振參數(shù)分布圖。

圖5 瑞利散射模型及大氣偏振模式分布圖Fig.5 Rayleigh scattering model and atmospheric polarization pattern
2007年,大連理工大學(xué)趙開春等人[17]基于瑞利散射理論,運(yùn)用可視化C++軟件,開發(fā)了大氣偏振模式測量仿真系統(tǒng),實(shí)現(xiàn)了對全天空偏振光分布模式的仿真,并能夠通過參數(shù)設(shè)置,預(yù)測指定時(shí)間點(diǎn)和地理位置的天空偏振信息,如圖6所示;2010年,合肥工業(yè)大學(xué)張旭東等人[18]運(yùn)用麥克斯韋方程研究光波的前向散射過程,并從電矢量的角度出發(fā),分析太陽光在理想大氣中的單次瑞利散射過程,建立了基于矢量法的天空偏振光分布模型。
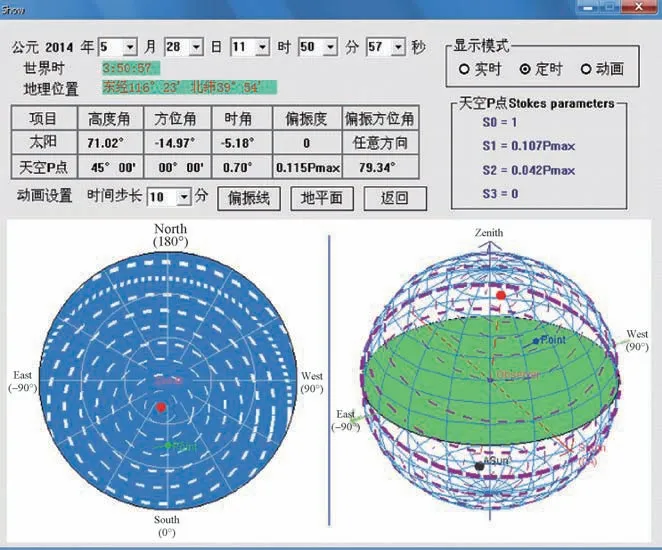
圖6 大連理工大學(xué)開發(fā)的可視化大氣偏振信息測量系統(tǒng)界面Fig.6 Interface of visual atmospheric polarization information measurement system developed by Dalian University of Technology
在多云、雨雪等復(fù)雜天氣環(huán)境下,大氣中存在許多大尺度的水滴、塵埃等粒子,自然光經(jīng)常會(huì)發(fā)生多次散射,簡單的瑞利散射模型已經(jīng)無法有效解釋該過程。1908年,學(xué)者M(jìn)ie提出了米氏散射理論[19],當(dāng)大氣中浮游粒子的直徑與入射光波長相近時(shí),其散射過程符合米氏散射模型。
2010年,中國科學(xué)院上海光學(xué)精密機(jī)械研究所黃旭鋒等人[20]基于米氏散射理論建立了單次光的散射偏振模型,并利用矢量偏振分析裝置測量大氣散射光的偏振態(tài),分析了不同天氣狀況對大氣偏振模式的影響;2011年,合肥工業(yè)大學(xué)吳良海等人[21]利用米氏散射模型分析了大氣中多種粒子的散射與偏振特性,并通過隨機(jī)傳輸理論進(jìn)行仿真;2013年,大連理工大學(xué)覃彬等人[22]運(yùn)用米氏散射模型和斯托克斯矢量方法,分析多種不同尺寸氣溶膠粒子對天空光偏振度的影響,并搭建了天空偏振光測量系統(tǒng)。相關(guān)研究結(jié)果表明,米氏散射模型更貼近于實(shí)際的大氣散射,但在解釋氣溶膠等復(fù)雜大氣成分的偏振傳輸特性時(shí),存在一定的局限性。
2011年,Buras等人[23]提出了基于蒙特卡洛法的矢量輻射傳輸模型,在大氣散射傳輸模型中引入了氣溶膠、云團(tuán)等復(fù)雜大氣成分的影響,如圖7所示。矢量輻射傳輸模型克服了米氏散射模型的局限性,可用于建立更符合實(shí)際情形的大氣偏振分布模型。
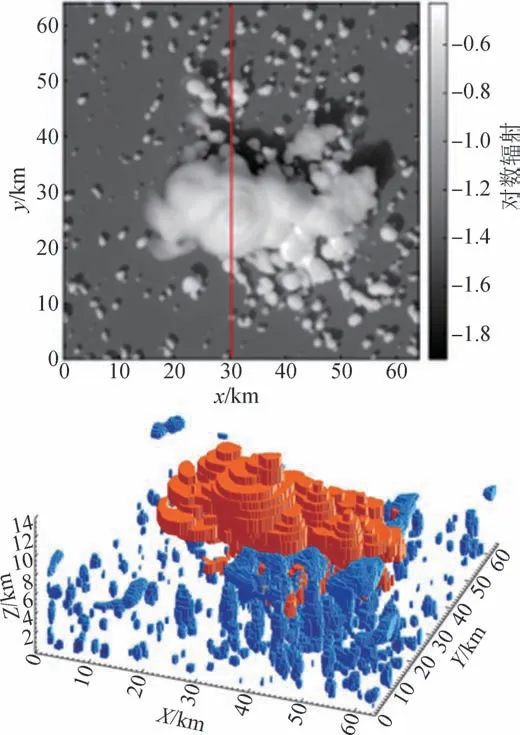
圖7 Buras等人提出的矢量輻射傳輸模型及仿真測試圖Fig.7 Vector radiation transmission model and simulation test proposed by Buras et al
考慮到矢量輻射傳輸模型的復(fù)雜性,采用傳統(tǒng)分析方法無法模擬大氣散射光傳輸?shù)倪^程。2013年,大連理工大學(xué)王威等人[24]利用簡化的雙層大氣模型模擬實(shí)際大氣,并通過“倍加-累加法”求解矢量輻射傳輸方程,得到全天空離散點(diǎn)處光波的斯托克斯參量,建立了基于矢量輻射傳輸模型的大氣偏振模型,如圖8所示。2014年,合肥工業(yè)大學(xué)王子謙等人[25]基于矢量輻射傳輸模型提出了一種針對渾濁大氣偏振模式的建模方法,并對大氣的偏振分布模式與變化特性進(jìn)行分析和預(yù)測。
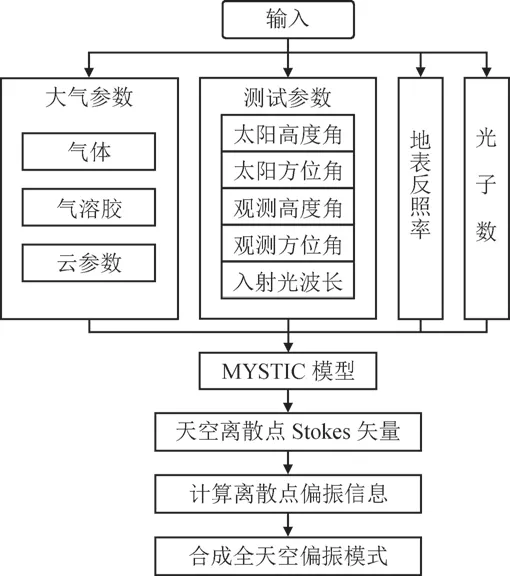
圖8 大連理工大學(xué)基于蒙特卡洛法的大氣偏振建模流程圖Fig.8 Flow chart of atmospheric polarization modeling based on Monte Carlo method developed by Dalian University of Technology
2.2 天空偏振分布規(guī)律研究
20世紀(jì)末,隨著光學(xué)探測技術(shù)的發(fā)展,國外學(xué)者針對大氣偏振模式測量方法的研究不斷深入。1981年,學(xué)者Brines運(yùn)用簡易的偏振光探測裝置,以間隔5°的太陽高度角和太陽方位角,對全天空偏振光場進(jìn)行掃描測量[26]。1997年,Voss等人使用改進(jìn)的廣角相機(jī),設(shè)計(jì)了天空偏振信息測量系統(tǒng),對視野內(nèi)的天空光偏振特性進(jìn)行了實(shí)時(shí)探測與分析[27]。1999年,Horvath等人對日出時(shí)刻的天空光偏振信息進(jìn)行了探測,通過分析得到了天空光偏振度與太陽位置的關(guān)系,進(jìn)一步驗(yàn)證了晴朗天空下瑞利散射模型的合理性[28]。
近年來,國內(nèi)相關(guān)研究領(lǐng)域也相繼開展了針對天空偏振分布規(guī)律的研究,包括中國科學(xué)院安徽光學(xué)精密機(jī)械研究所、中國科學(xué)院遙感應(yīng)用研究所、中國科學(xué)院上海技術(shù)物理研究所、國防科技大學(xué)、北京大學(xué)、清華大學(xué)、大連理工大學(xué)、中北大學(xué)、西北工業(yè)大學(xué)等眾多單位均基于仿生導(dǎo)航應(yīng)用,展開了相關(guān)研究工作。其中,清華大學(xué)趙開春等人[29]搭建了基于CMOS工業(yè)相機(jī)的分時(shí)天空偏振光自動(dòng)探測裝置,并利用該裝置對天頂偏振光進(jìn)行了長時(shí)間的持續(xù)觀測,如圖9所示;中國科學(xué)院安徽光學(xué)精密機(jī)械研究所開發(fā)了多波段偏振探測型CCD相機(jī),并以Y-12飛機(jī)作為飛行平臺,開展了多次天空偏振遙感探測試驗(yàn)[30];北京大學(xué)晏磊團(tuán)隊(duì)[31]運(yùn)用全天空偏振測量裝置,對多波段天空偏振光的分布模式進(jìn)行了探測,并結(jié)合天文導(dǎo)航方法,分析了生物利用天空偏振信息確定航向的機(jī)理;大連理工大學(xué)褚金奎[24]課題組分別基于瑞利散射模型和矢量輻射傳輸模型,分析了多種天氣條件下全天空多波段偏振光的分布規(guī)律,如圖10所示,并通過仿真分析結(jié)果,對昆蟲偏振視覺敏感區(qū)多位于藍(lán)紫波段的現(xiàn)象進(jìn)行了解釋,進(jìn)而為仿生偏振光導(dǎo)航應(yīng)用提供了理論依據(jù)[32-33]。
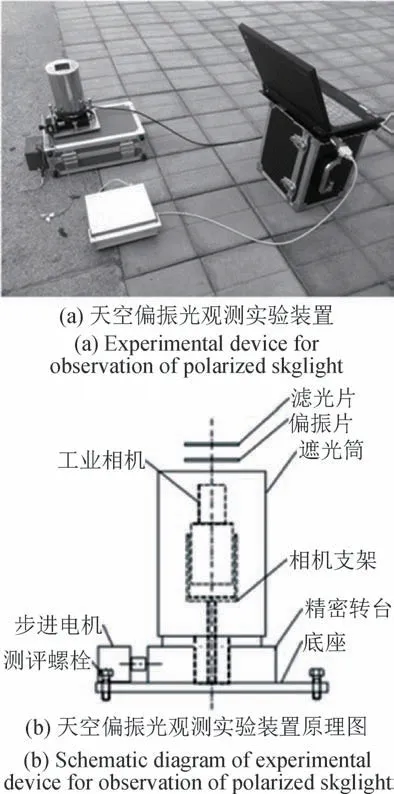
圖9 清華大學(xué)搭建的天空偏振光觀測實(shí)驗(yàn)裝置圖Fig.9 Experimental device for observation of polarized skylight designed by Tsinghua University
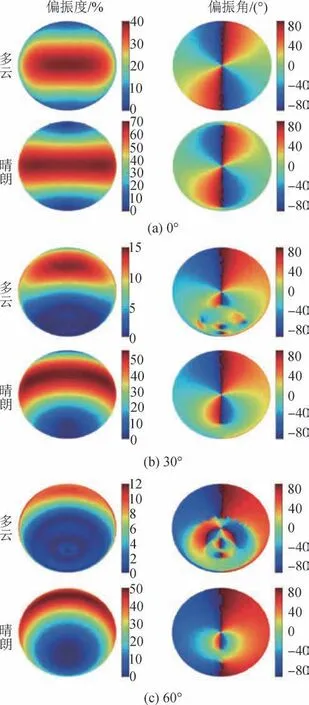
圖10 大連理工大學(xué)針對水云條件下的天空偏振模式仿真圖Fig.10 Simulation results of the skylight polarization model under water cloud conditions proposed by Dalian University of Technology
3 偏振光導(dǎo)航傳感器的發(fā)展與應(yīng)用
導(dǎo)航能力是生物感知,預(yù)測自身方位信息的關(guān)鍵方法。隨著信息時(shí)代的發(fā)展,導(dǎo)航定位技術(shù)在人類活動(dòng)中,愈發(fā)凸顯重要意義。目前,廣泛應(yīng)用的導(dǎo)航技術(shù)包括地圖導(dǎo)航、無線電導(dǎo)航、慣性導(dǎo)航、天文導(dǎo)航等多種手段;而基于多傳感器信息融合的組合導(dǎo)航技術(shù)與多策略自適應(yīng)的智能自主導(dǎo)航方法,逐漸成為現(xiàn)代導(dǎo)航技術(shù)的發(fā)展趨勢。
受生物啟發(fā)的偏振光導(dǎo)航技術(shù),具有完全自主、抗主動(dòng)干擾、誤差不隨時(shí)間累計(jì)的優(yōu)勢[34]。開發(fā)偏振光導(dǎo)航傳感器,探索仿生偏振光導(dǎo)航方法,為面向復(fù)雜環(huán)境,遠(yuǎn)距離、長周期的目標(biāo)自主導(dǎo)航與組合導(dǎo)航應(yīng)用,提供了新的研究思路。
3.1 偏振光導(dǎo)航傳感器的發(fā)展
早期偏振光導(dǎo)航傳感器的研究工作,主要從模仿昆蟲的單一復(fù)眼結(jié)構(gòu)出發(fā),探索其導(dǎo)航原理的可行性。1997年,Labhart等人[35]模仿蟋蟀的DRA小眼結(jié)構(gòu)與POL神經(jīng)元機(jī)理,首先開發(fā)出了多通道仿生偏振光探測裝置,并將其搭載在移動(dòng)機(jī)器人上開展模擬導(dǎo)航實(shí)驗(yàn),如圖11所示;2008年,大連理工大學(xué)褚金奎課題組趙開春等人[36]從沙蟻的偏振導(dǎo)航機(jī)理出發(fā),研制了基于ARM微處理器的三通道偏振光導(dǎo)航傳感器,如圖12所示;該傳感器的光學(xué)探測通道由線性檢偏片,藍(lán)色濾光片和硅光電二極管構(gòu)成,其三通道的偏振敏感方向依次為0°,60°,120°,各通道通過對數(shù)放大單元,將光電流轉(zhuǎn)換為可供解算的電壓信號,經(jīng)系統(tǒng)標(biāo)定,其角度測量誤差在±0.2°范圍內(nèi);2012年,紐卡斯?fàn)柎髮W(xué)的Chahl等人[37]模仿蜻蜓的偏振視覺探測機(jī)理,設(shè)計(jì)了包含環(huán)境光與天空偏振光感知的多單元仿生偏振探測裝置,并將其安裝在彈射滑翔機(jī)的頭部,完成了無人機(jī)飛行的航向角測量,如圖13所示。
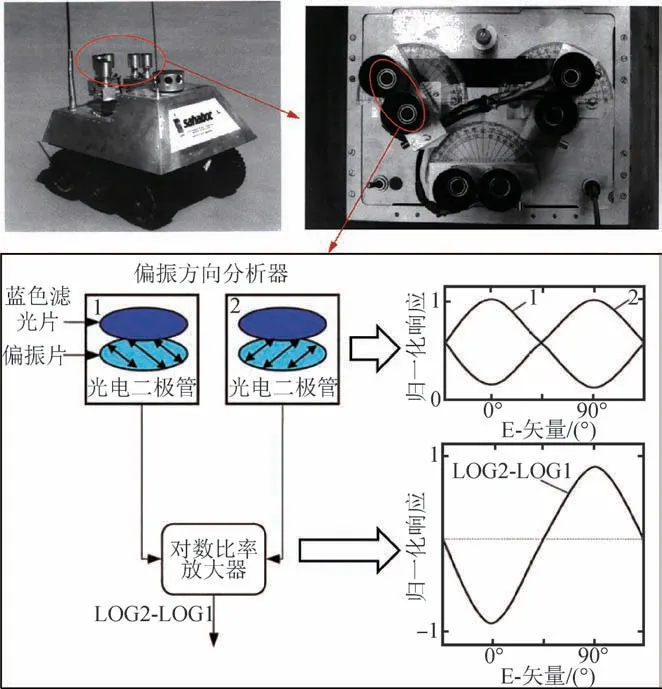
圖11 Labhart等人搭建的仿生天空偏振光探測裝置及原理示意圖Fig.11 Bionic polarized skylight detection device and schematic diagram designed by Labhart et al
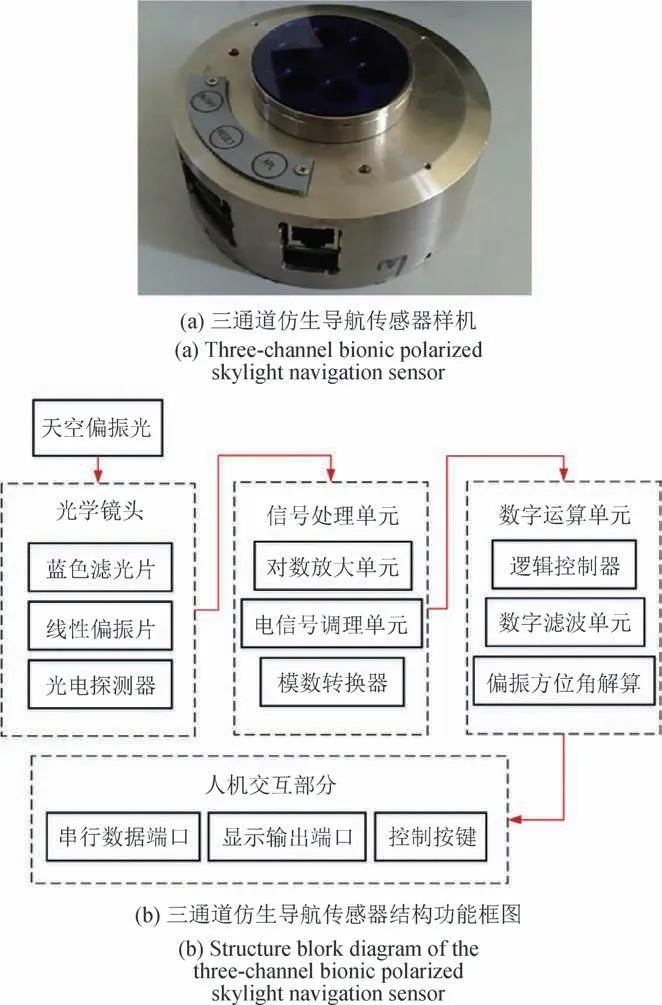
圖12 大連理工大學(xué)設(shè)計(jì)的三通道仿生導(dǎo)航傳感器樣機(jī)及傳感器結(jié)構(gòu)功能框圖Fig.12 Three-channel bionic polarized skylight navigation sensor and structure block diagram of the sensor designed by Dalian University of Technology
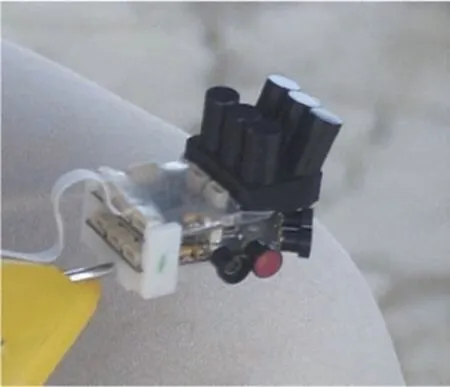
圖13 Chahl等人開發(fā)的仿蜻蜓偏振探測裝置Fig.13 The dragonfly-like polarization detection device developed by Chahl et al
隨著研究的深入,偏振光導(dǎo)航傳感器技術(shù)已逐漸走向成熟。現(xiàn)有的偏振光導(dǎo)航傳感器,從結(jié)構(gòu)上可分為點(diǎn)源式偏振光傳感器和成像式偏振光傳感器。點(diǎn)源式偏振光傳感器一般由多個(gè)分立的感光元件構(gòu)成,其結(jié)構(gòu)簡單,數(shù)據(jù)單元較少,易于處理,且響應(yīng)速度和瞬時(shí)精度可以達(dá)到較高的水平。2014年,大連理工大學(xué)褚金奎課題組基于納米壓印工藝,設(shè)計(jì)并制作了一種集成式偏振光探測陣列[38],該集成器件的微納結(jié)構(gòu)如圖14所示。圖中,(a)~(f)光敏區(qū)表面不同排列方向的金屬光柵,其相對角度分別為0°,60°,120°,90°,150°,30°;在SOI基底上制作六個(gè)分立的硅光敏PN結(jié)(如圖9),并在各光敏區(qū)域表面壓印不同方向的雙層金屬納米光柵作為偏振片,以該器件作為偏振探測單元,研制的集成偏振光導(dǎo)航傳感器,具備微型化的特點(diǎn),且室內(nèi)標(biāo)定誤差在±0.1°范圍內(nèi),能夠滿足偏振導(dǎo)航的要求。
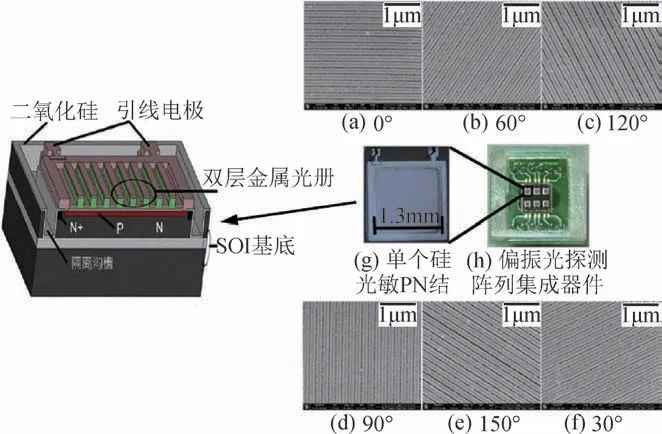
圖14 大連理工大學(xué)設(shè)計(jì)的偏振光探測陣列集成器件結(jié)構(gòu)與微形貌Fig.14 Structure and micro morphology of polarization detection array integrated device designed by Dalian University of Technology
近年來,隨著半導(dǎo)體技術(shù)的不斷發(fā)展,CCD,CMOS等新型的成像式光敏器件逐步走向成熟。基于MEMS工藝的成像式感光器件,使單位面積上的感光像素?cái)?shù)量提高了數(shù)十萬倍,其數(shù)據(jù)穩(wěn)定性明顯優(yōu)于傳統(tǒng)的光電二極管陣列。同時(shí),適用于CMOS傳感器的天空偏振模式圖像識別算法,有效提升了偏振光傳感器對于復(fù)雜天氣的適應(yīng)能力,這使得成像式偏振光導(dǎo)航傳感器具備更佳的測量魯棒性。2016年,國防科技大學(xué)胡小平團(tuán)隊(duì)[39]利用四通道CCD相機(jī),設(shè)計(jì)了一種成像式偏振導(dǎo)航傳感器,如圖15所示。該傳感器的單通道偏振感光單元(如圖15(a))由廣角鏡頭、線性檢偏片和CCD相機(jī)(如圖15(b))組成,各通道的偏振敏感方向依次相差45°(如圖15(c));經(jīng)過誤差分析與系統(tǒng)標(biāo)定,其理論測量精度較高,且在室外測量時(shí)具有較好的魯棒性。2020年,大連理工大學(xué)褚金奎課題組關(guān)傳瀧等人運(yùn)用納米壓印技術(shù),將多方向金屬線柵壓印在CMOS器件表面,實(shí)現(xiàn)了成像式偏振探測單元的集成,如圖16所示。其中,圖16(a)為使用成像式集成單元搭建的傳感器樣機(jī),圖16(b)和圖16(e)為集成單元微結(jié)構(gòu)與金屬光柵排列方向示意圖,其相對角度分別為0°,60°,90°,150°。之后利用該微型器件,設(shè)計(jì)了一種支持角度實(shí)時(shí)解算的成像式偏振導(dǎo)航傳感器,并通過自適應(yīng)魯棒標(biāo)定算法,實(shí)現(xiàn)了誤差范圍在±0.1°的室內(nèi)測量精度[40]。
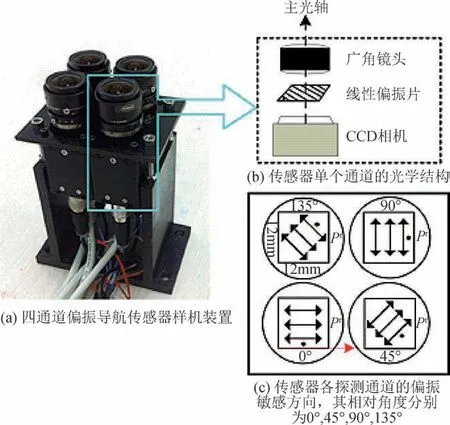
圖15 國防科技大學(xué)搭建的成像式偏振導(dǎo)航傳感器樣機(jī)Fig.15 Camera-based polarization navigation sensor prototype designed by National University of Defense Technology
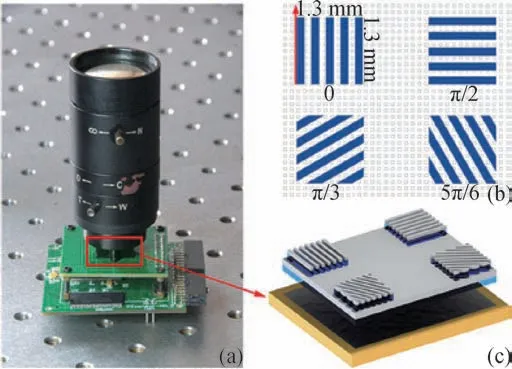
圖16 大連理工大學(xué)開發(fā)的成像式偏振探測集成單元及傳感器樣機(jī)Fig.16 Camera-based polarization detection integrated unit and sensor prototype developed by Dalian University of Technology
目前,偏振光導(dǎo)航傳感器正朝向微型化、集成化、高精度、強(qiáng)魯棒性的目標(biāo)發(fā)展;基于多光譜測量、多傳感器融合、圖像化智能算法技術(shù)的新一代偏振光導(dǎo)航測量系統(tǒng),將獲得更加廣泛的應(yīng)用。
3.2 偏振光導(dǎo)航方法的應(yīng)用
伴隨偏振光導(dǎo)航傳感器技術(shù)的快速發(fā)展,基于仿生機(jī)理的偏振光導(dǎo)航方法,逐步面向?qū)嶋H導(dǎo)航應(yīng)用場合。1999年,Labhart等人[41]將自制的仿沙蟻復(fù)眼偏振光傳感器與環(huán)境光傳感器安裝在Sahabot 2移動(dòng)機(jī)器人上,用以解算朝向信息,并結(jié)合光電編碼器完成路徑積分算法,實(shí)現(xiàn)了室外環(huán)境下機(jī)器人的簡單導(dǎo)航任務(wù),如圖17所示。
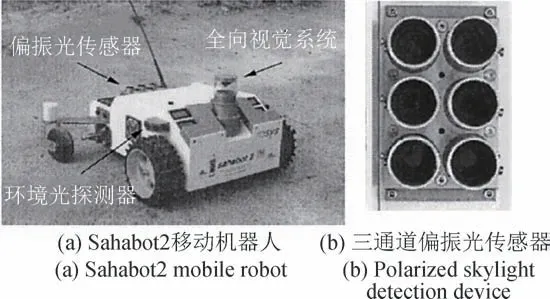
圖17 Labhart等人開發(fā)的Sahabot 2移動(dòng)機(jī)器人及其搭載的偏振光傳感器Fig.17 Sahabot 2 mobile robot and its polarized skylight detection device developed by Labhart et al
2010年,大連理工大學(xué)褚金奎課題組[42]基于點(diǎn)源式偏振光導(dǎo)航傳感器和光電編碼器,搭建了輪式移動(dòng)機(jī)器人自主導(dǎo)航測試平臺,并通過軌跡規(guī)劃實(shí)驗(yàn),實(shí)現(xiàn)了無GPS條件下機(jī)器人的自主導(dǎo)航,如圖18所示。

圖18 大連理工大學(xué)開發(fā)的移動(dòng)機(jī)器人自主導(dǎo)航測試平臺Fig.18 Mobile robot autonomous navigation test platform developed by Dalian University of Technology
近年來,針對長距離、復(fù)雜場景的現(xiàn)代導(dǎo)航應(yīng)用,將偏振光導(dǎo)航方法融入組合導(dǎo)航系統(tǒng),得到了國內(nèi)外多所研究院校的密切關(guān)注。2012年,東南大學(xué)祝燕華等人[43]將偏振光導(dǎo)航、慣性導(dǎo)航與GPS導(dǎo)航方法等進(jìn)行融合,并通過系統(tǒng)動(dòng)態(tài)仿真,驗(yàn)證了偏振光組合導(dǎo)航方法能夠有效增強(qiáng)系統(tǒng)導(dǎo)航性能。2015年,大連理工大學(xué)王寅龍等人[44]設(shè)計(jì)了一種基于偏振光場與地磁場模型的自主實(shí)時(shí)定位樣機(jī),如圖19所示。通過樣機(jī)多方向偏振光傳感器與電子羅盤提供的實(shí)時(shí)數(shù)據(jù),結(jié)合外部的時(shí)間與地磁方向信息,能夠解算樣機(jī)所在位置的經(jīng)緯度信息。
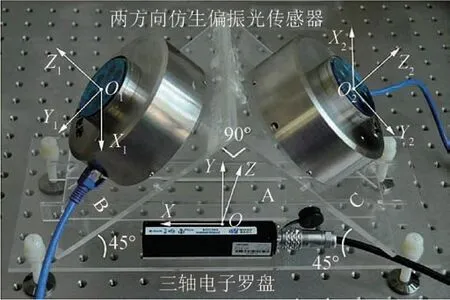
圖19 基于偏振光與地磁場模型的自主實(shí)時(shí)定位樣機(jī)Fig.19 Autonomous real-time positioning prototype based on polarized light and geomagnetic field model
2017年,大連理工大學(xué)支煒等人[45]運(yùn)用擴(kuò)展卡爾曼濾波算法,將多傳感器信息進(jìn)行融合解算,并基于四旋翼無人機(jī)平臺開展了偏振光組合導(dǎo)航飛行實(shí)驗(yàn),如圖20所示。其軌跡精度與航姿解算精度均有一定的提升。
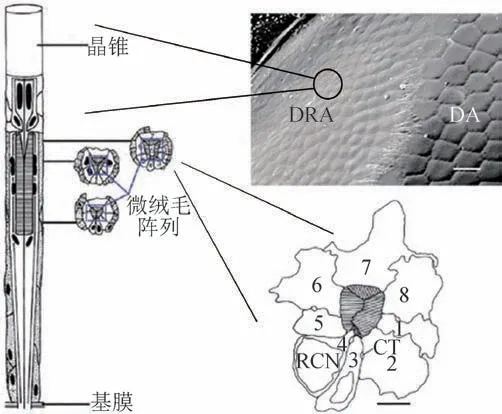
圖2 蝗蟲的DRA小眼結(jié)構(gòu)圖Fig.2 DRA ommatidium structure of locusts
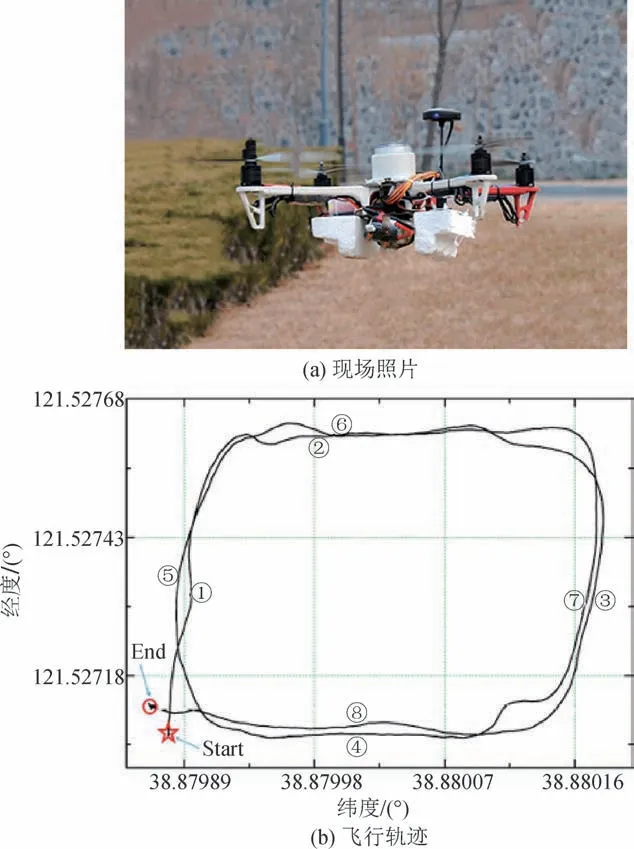
圖20 無人機(jī)平臺的偏振光組合導(dǎo)航飛行實(shí)驗(yàn)Fig.20 Polarized light integrated navigation flight experiment of UAV platform
2019年,法國馬賽大學(xué)的Dupeyroux等人[46]開發(fā)了一種針對天空紫外波段偏振光的點(diǎn)源式探測裝置,將其安裝在AntBot仿沙蟻六足機(jī)器人上,并運(yùn)用組合導(dǎo)航方法模擬沙蟻的歸巢行為,如圖21所示。實(shí)驗(yàn)結(jié)果表明,偏振光導(dǎo)航方法能夠保證“沙蟻順利歸巢”,即有效提升機(jī)器人長距離移動(dòng)后的相對位置重復(fù)性。

圖21 AntBot仿沙蟻六足機(jī)器人及其搭載的天空紫外波段偏振光探測裝置Fig.21 AntBot desert-ant-like hexapod robot and its ultraviolet-waveband polarized skylight detection device
4 結(jié)論
自然界中,眾多生物擁有感知環(huán)境偏振光的奇妙能力,引起了研究人員對仿生偏振探測機(jī)理的密切關(guān)注。通過大量的仿生學(xué)研究發(fā)現(xiàn),生物的偏振探測能力,來源于其特殊的復(fù)眼DRA結(jié)構(gòu),與視神經(jīng)中POL神經(jīng)元的協(xié)同作用;其中,多種昆蟲能夠利用偏振視覺,輔助個(gè)體與種群完成天空環(huán)境下的復(fù)雜導(dǎo)航任務(wù)。
面向理想大氣環(huán)境,瑞利散射模型相對簡單,能夠較好地描述晴朗環(huán)境下的大氣偏振模式分布模式;米氏散射與矢量輻射傳輸模型,能夠解釋復(fù)雜天氣環(huán)境下大氣散射光的傳輸過程,但其分析過程較為復(fù)雜,相關(guān)環(huán)境參數(shù)不易量化,在實(shí)際應(yīng)用中仍受到諸多限制。近年來,國內(nèi)外眾多研究機(jī)構(gòu),對天空偏振光分布模式進(jìn)行了長期的觀測與分析,研究結(jié)果表明,瑞利散射對天空偏振分布具有指導(dǎo)意義,天空的藍(lán)紫色波段光更利于偏振光探測及導(dǎo)航。
受生物啟發(fā)的偏振光導(dǎo)航技術(shù),具有完全自主、抗主動(dòng)干擾、誤差不隨時(shí)間累計(jì)的優(yōu)勢。開發(fā)偏振光導(dǎo)航傳感器,探索仿生偏振光導(dǎo)航方法,為復(fù)雜條件下,遠(yuǎn)距離的目標(biāo)自主導(dǎo)航與組合導(dǎo)航應(yīng)用,提供了新的研究思路。目前,偏振光導(dǎo)航傳感器正朝向微型化、集成化、高精度、強(qiáng)魯棒性的目標(biāo)發(fā)展;基于多光譜測量、多傳感器融合、圖像化智能算法技術(shù)的新一代偏振光導(dǎo)航測量系統(tǒng),將獲得更加廣泛的應(yīng)用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
軍事文摘(2023年10期)2023-06-09 09:15:06
空間科學(xué)學(xué)報(bào)(2021年4期)2021-08-30 08:31:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農(nóng)業(yè)(2016年18期)2016-08-16 03:28:27
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03