直聯式剛性聯軸器產生同步誤差的原因分析及解決方法
2021-12-12 10:09:55黃自祥
科技信息·學術版 2021年32期


摘要:對直聯式剛性聯軸器產生同步誤差的原因進行了分析,推導出了同步誤差公式,給出了數值解,并提出了消除同步誤差的方法。
關鍵詞:方位同步輪系;自整角機;剛性聯軸器;同軸度誤差
引言
在雷達系統工作時,伺服控制系統通過自整角機實時獲取天線波束掃描的方位信息。有些雷達方位自整角機與方位同步輪系采用剛性聯軸器進行聯結,結果在使用中發現存在同步誤差。本文從數學角度對同步誤差產生的原因進行分析,推導其同步誤差公式,給出數字解,并提出解決方法。
1同步誤差產生原因分析
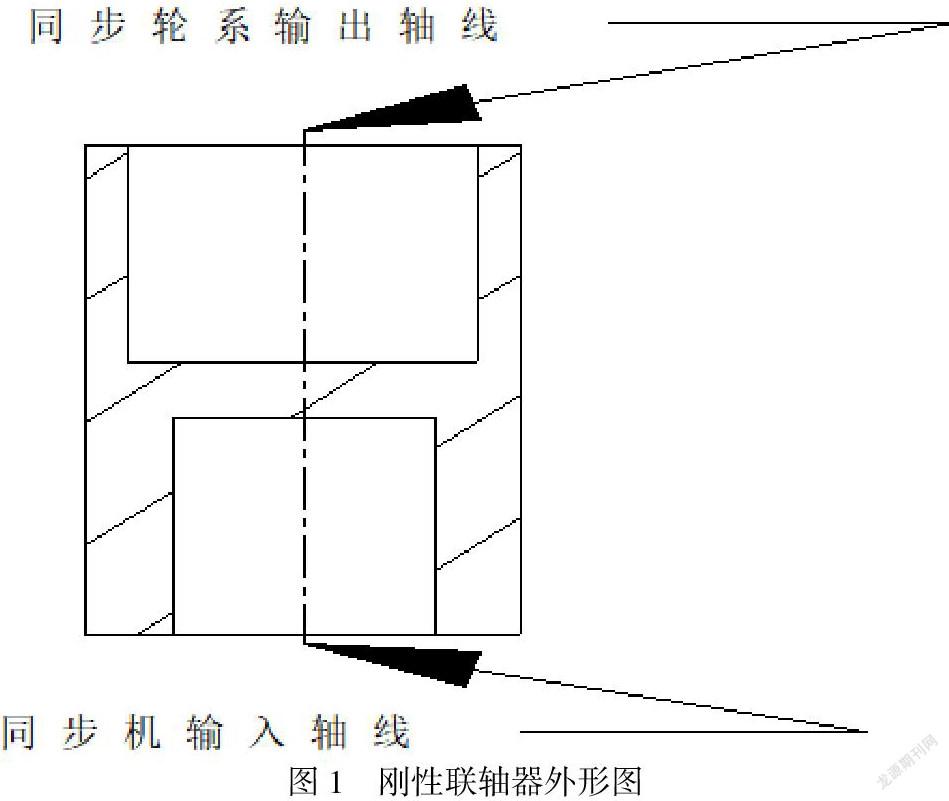
在雷達傳動系統中,方位同步輪系通過速比變換,將雷達天線方位按1:1進行輸出,方位自整角機用聯軸器聯結到方位同步輪系的輸出軸上,從而實時反映天線方位信息。剛性聯軸器外形見圖1。
由于剛性聯軸器上下軸孔加工時,不可能完全同心,存在加工誤差,因此當用剛性聯軸器將自整角機連接到同步輪系的輸出軸時,會帶來同步誤差。
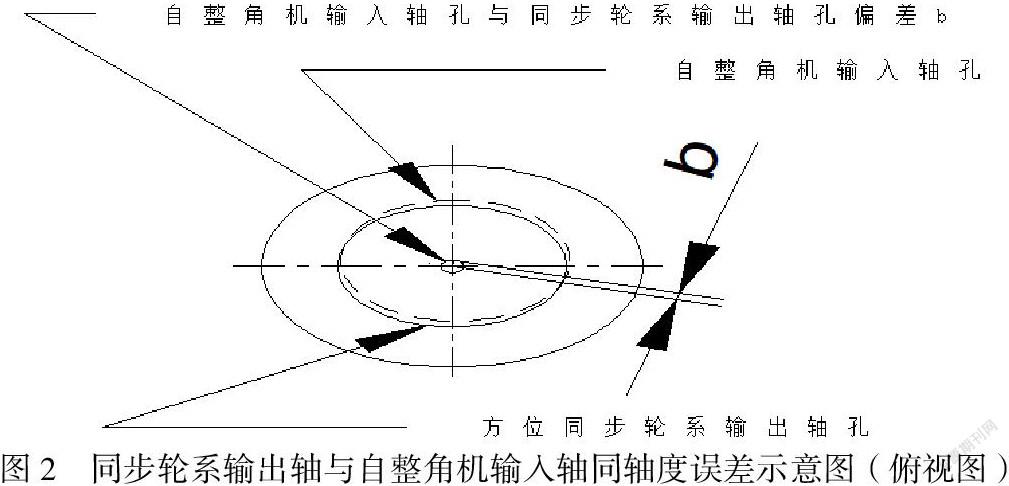
這里我們假設剛性聯軸器上端軸孔與聯軸器外圓同軸,不存在加工誤差,而其下端軸孔與聯軸器外圓不同軸,存在偏差。即自整角機輸入軸孔與同步輪系輸出軸孔存在偏差,其同軸度誤差為b,見圖2。
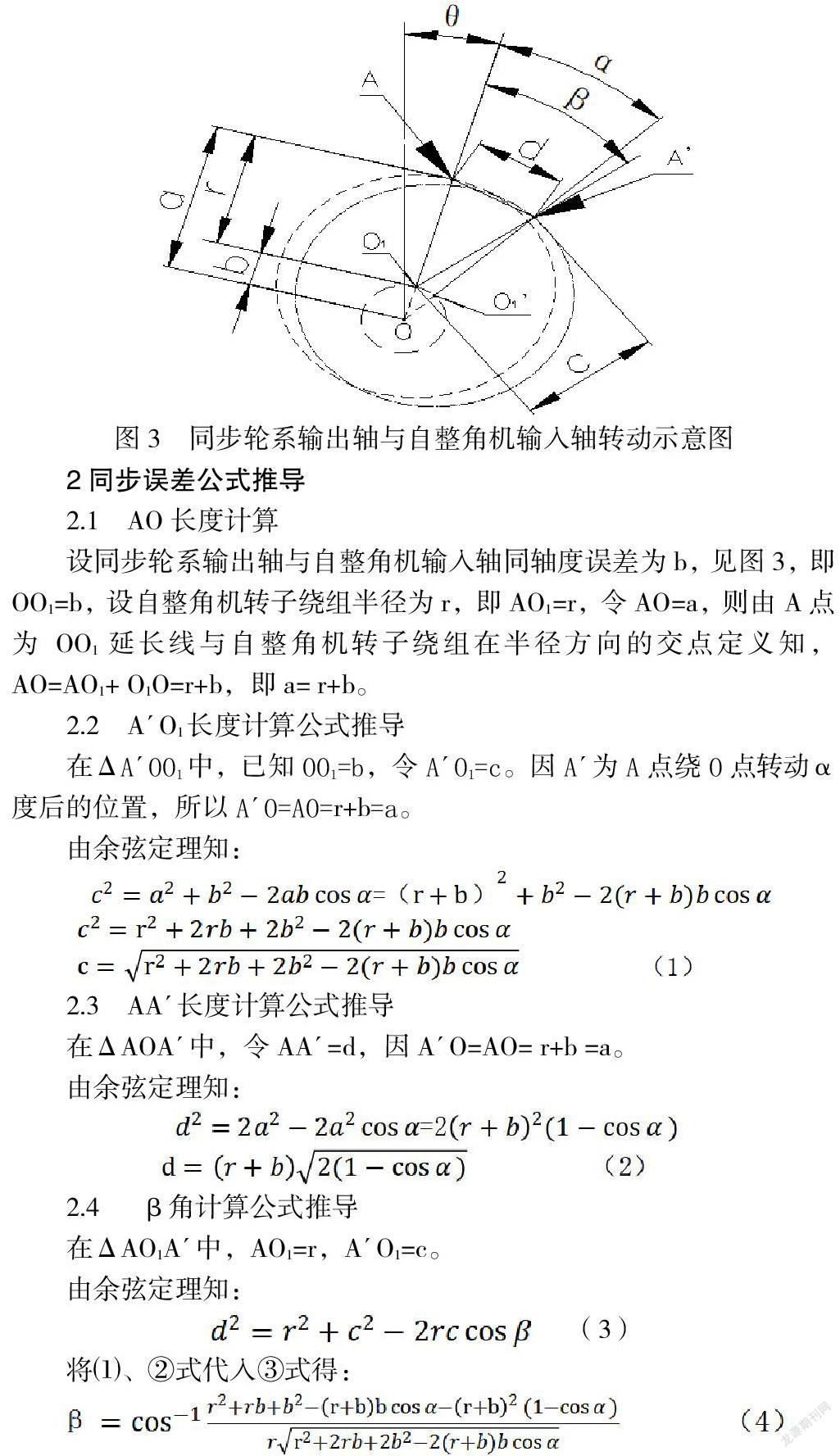
當雷達天線轉動時,方位傳動系統方位大齒輪帶動同步輪系轉動。同步輪系的輸出軸帶動自整角機轉動,從而實時輸出雷達天線方位信號。若自整角機輸入軸與同步輪系輸出軸存在同軸度誤差b,當同步輪系輸出軸繞剛性聯軸器軸線中心點O轉動α度時(見圖3),因自整角機與聯軸器為剛性聯結,其輸入軸中心點O1(O1亦為自整角機定子繞組的中心)也會繞O點轉動α度,且由O1點旋轉到了O1′點。此時自整角機輸入軸上的A點(A點為OO1延長線與自整角機轉子繞組在半徑方向的交點)也旋轉α度到了A′點。但此時自整角機轉子繞組相對自整角機定子繞組中心O1點只旋轉了β度,見圖3。自整角機輸出的度數反映的是轉子繞組繞定子繞組中心旋轉的度數β。由圖3可見,α角和β角顯然不同,這就帶來了同步誤差。圖中θ為AO連線與方位正北的夾角。以上所述O1點繞O點轉動及后續公式推導,只有在自整角機軸承的徑向游隙大于OO1的距離時,方才成立。當自整角機軸承的徑向游隙小于OO1的距離時,需同步輪系輸出軸發生徑向位移,情況非常復雜,本文不予論述。
3 不同同軸度誤差對同步精度誤差影響的數值解
聯結同步輪系和自整角機的剛性聯軸器,其外徑一般不會超過12 mm,聯結同步輪系一端孔的內徑一般不會超過6 mm;聯結自整角機的另一端孔的內徑一般不會超過3 mm,高度不會超過40 mm。因此聯軸器加工時,即使需掉頭加工2個光孔,但2個光孔的同軸度誤差一般不會超過0.05 mm。
下面通過式④、⑤分別給出自整角機轉子繞組半徑為12 mm,聯軸器兩個光孔同軸度誤差分別為0.03 mm、0.04 mm及0.05 mm時的同步誤差圖。
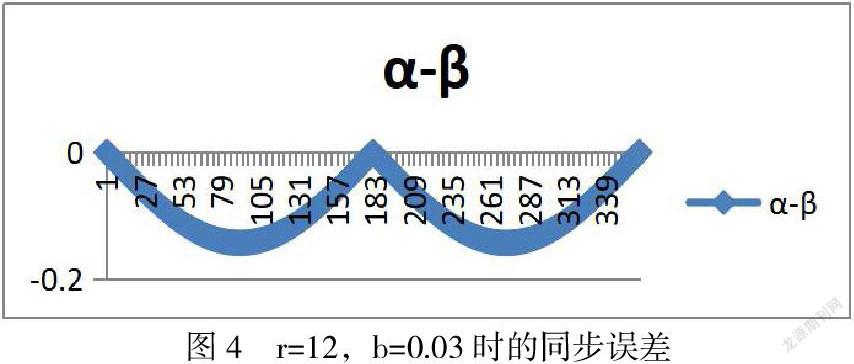
從圖4可看出當r=12,b=0.03時,方位最大絕對誤差值為-0.143°,出現在天線順時針旋轉90°的位置;從圖4還可以看出,天線真實方位始終小于自整角機給出的方位,α-β同步誤差值始終為負,且呈180°負半正弦波周期重復。如若將天線正北方位精度校為0度,則α-β曲線以360-θ時的α-β值的絕對值,沿垂直軸方向整體向上平移,曲線形狀不變,同步誤差絕對值減小,方位誤差會出現超前和滯后現象。
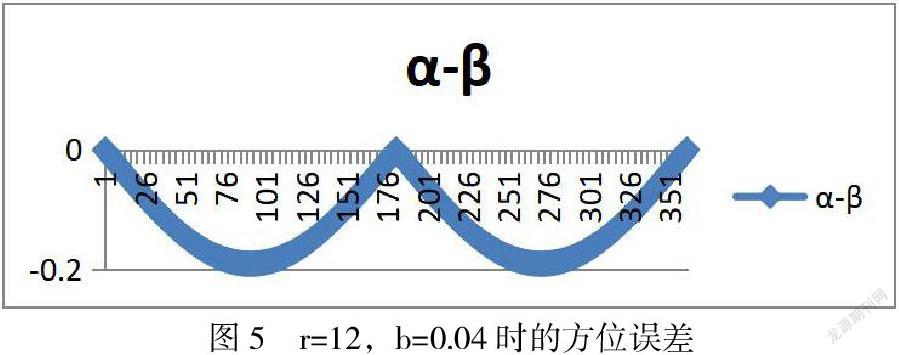
從圖5可看出當r=12,b=0.04時,方位最大絕對誤差值為-0.19°,出現在天線順時針旋轉90°的位置;從圖5還可以看出天線真實方位始終小于自整角機給出的方位,α-β同步誤差值始終為負,且呈180°負半正弦波周期重復。如若將天線正北方位精度校為0度,則α-β曲線以360-θ時的α-β值的絕對值,沿垂直軸方向整體向上平移,曲線形狀不變,同步誤差絕對值減小,方位誤差會出現超前和滯后現象。
從圖6可看出當r=12,b=0.05時,方位最大絕對誤差值為-0.238°,出現在天線順時針旋轉90°的位置;從圖6還可以看出天線真實方位始終小于自整角機給出的方位,α-β同步誤差值始終為負,且呈180°負半正弦波周期重復。如若將天線正北方位精度校為0度,則α-β曲線以360-θ時的α-β值的絕對值,沿垂直軸方向整體向上平移,曲線形狀不變,同步誤差絕對值減小,方位誤差會出現超前和滯后現象。
從圖4、圖5、圖6可以看出同步誤差絕對值隨同軸度誤差增加而增加,當同軸度誤差數值較小時,同步誤差絕對值與同軸度誤差基本呈線性比例關系。
4 同步誤差消除方法
剛性聯軸器具有加工簡單、聯結方便的優點,但通過上述公式推導和數值解可見,用剛性聯軸器聯結自整角機,不可避免會帶來同步誤差,不適合于高精度雷達系統。
對于方位精度要求不高的雷達系統,可采用剛性聯軸器,但應盡量減小同軸度誤差。對高精度雷達系統,若采用了剛性聯軸器,則可用數值方法進行修正,以消除同步誤差。
對高精度雷達系統建議采用十字滑塊聯軸器或高精度彈性聯軸器聯結同步輪系和自整角機,以免帶來同步誤差。
5 結束語
本文以公式及數值解的形式,證明了用剛性聯軸器聯結同步輪系和自整角機,不可避免地會帶來同步誤差。因此在同步精度要求高的雷達系統中應盡量避免使用剛性聯軸器聯結同步輪系和自整角機,以保證系統方位同步精度。若采用了剛性聯軸器,則可用數值方法予以修正。
參考文獻
[1]孫萍,孫麟治.十字滑塊聯軸器精度分析[J].上海大學學報,1995(3):302-307.
[2]朱孝錄.機械傳動設計手冊.電子工業出版社,2007年10月
作者簡介:黃自祥 男,1975年出生,高級工程師,長期從事雷達總體結構設計及科研生產管理工作。
