基于關聯成像的氣缸蓋內壁影像檢測方法研究
2021-12-10 06:46:28張皓宇楊風暴王肖霞
內燃機工程 2021年6期
關鍵詞:關聯
張皓宇,楊風暴,王肖霞
(中北大學 信息與通信工程學院,太原 030051)
0 概述
氣缸蓋作為內燃機氣缸的核心部件之一,其主要功能是將氣缸密閉形成封閉空間,承受高溫高壓的工作環境。氣缸蓋上分布有多個氣門、噴油孔、螺栓和其他組件,在氣缸非穩定工況下氣缸蓋內壁極易產生磨損、凹陷、破裂等損壞,這將導致氣缸各部件相互間的協調紊亂,影響內燃機氣缸的工作性能[1-3],因此需對氣缸蓋內壁的狀況進行檢測。目前常規的氣缸蓋內壁檢測方法需將氣缸拆卸進行水壓、氣壓及目視等專項檢測再重新組裝調試,存在檢測時間長、耗費人力多、成本消耗較大等缺陷[4-5];而借助計算機模擬軟件對氣缸蓋進行有限元分析,通過溫度的變化規律及應力應變分析預測氣缸蓋內壁容易出現危險點的位置,難以直觀體現影響氣缸正常運行的主要原因,且建立氣缸蓋模型時缺乏切實可靠的邊界條件使得模擬結果與實際存在差距[6-12]。綜上所述,需要一種新型的更為直觀的方法來實現對氣缸蓋內壁的檢測。
影像技術在醫學、夜間探測等領域逐步獲得廣泛的應用[13-14]:將影像技術應用于醫學X光診斷中,可實現對人體內部器官、組織、腫瘤等的成像,輔助醫生對患者進行診斷,提高治療方案的準確性;將紅外檢測技術用于夜間行車探測,通過紅外熱像儀獲取路面目標圖像,識別行人、車輛等目標,可為夜間行車安全提供保障[15]。如果在氣缸蓋內壁的檢測中引入影像技術,直觀呈現氣缸蓋內壁影像,將利于氣缸蓋內壁的有效探測。然而,氣缸蓋內壁位于氣缸內部,處在高溫高壓的惡劣環境中,若要獲得相關圖像信息需將探測器放入氣缸內部,而傳統的影像技術無法對氣缸蓋內壁完美呈現,因而選擇關聯成像。關聯成像[16-17]又稱鬼成像(ghost imaging, GI),是一種新型的成像方式。其原理與傳統光學成像不同,目標圖像無需直接獲取,而是由兩部分探測數據進行關聯計算得到,且探測過程與重構影像過程完全獨立。光場關聯成像的探測過程收集了不同的光場分布信息及相應作用于目標后的總光強,而重構過程則是通過光場分布與總光強值關聯計算來還原出目標影像。利用關聯成像原理分離熱探測過程與影像重構過程,在氣缸蓋上布置傳感器測點,收集內壁的熱能量場分布和外壁的總熱量,再通過計算機對數據進行關聯重構影像,這種方式恰好可以解決傳統影像技術無法利用圖像探測器直接獲得氣缸蓋內壁影像的問題。
本文中針對目前氣缸蓋內壁檢測效率低且難以直觀體現的問題,利用關聯成像原理來實現氣缸蓋內壁影像的有效探測。采用壓縮感知關聯成像方法(compressed sensing ghost imaging, CSGI)對氣缸蓋內外壁兩部分數據進行關聯運算,實現氣缸蓋內壁影像的間接獲取。通過數值仿真,利用峰值信噪比及結構相似性等定量評價指標,結合重構影像的直觀性分析驗證了關聯成像應用于氣缸蓋內壁影像檢測的有效性。該方法可針對發動機缸內高溫高壓環境中無法對發動機缸蓋等熱負荷嚴重的關鍵部件進行直觀分析的問題提供一種新的分析手段,利于對缸蓋內壁磨損區域進行有效判定。
1 結合氣缸蓋工作規律的關聯成像分析
內燃機在高溫高壓的工作環境下,氣缸蓋易在熱應力的作用下產生磨損、開裂等問題。圖1為氣缸蓋底板的熱能傳遞示意圖。在氣缸蓋獲得來自燃燒室的熱能量后,熱能由底板內壁火力面①區域向外壁②區域傳播,在這一過程中,熱能在氣缸蓋內主要以熱傳導的方式傳遞[18-19]。
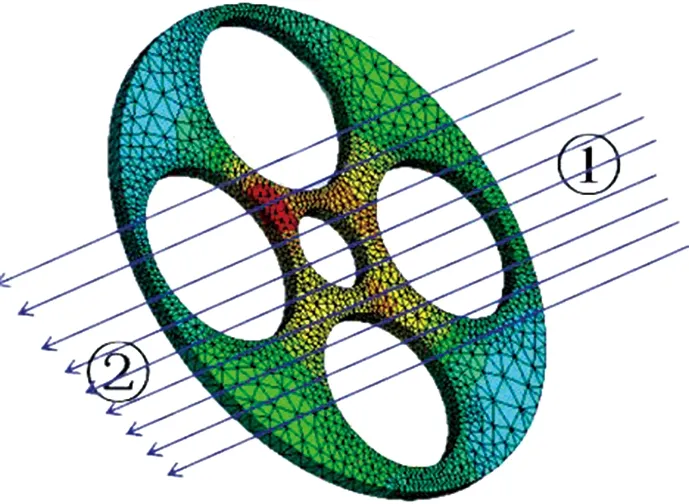
圖1 氣缸蓋底板的熱能傳遞
熱傳導過程遵循導熱基本定律——傅里葉定律,如式(1)所示。
(1)
式中,Φ為熱流量;A為傳熱面積;λ為熱導率;T為溫度;x為壁面厚度。
氣缸蓋內壁的熱能量場關聯成像[20]與傳統光場的關聯成像原理相同,需要通過氣缸蓋內壁熱場分布和氣缸蓋底板外壁總能量值兩部分數據來實現成像,如圖2所示。其中,氣缸蓋內壁熱場分布記錄的是氣缸運行的N個時刻缸蓋內壁每一點的熱能值,記作Ia(x,y;N);氣缸蓋底板外壁總能量值則是內壁熱場與氣缸蓋相互作用后底板外壁對應每個點透過的熱能值的疊加值,記作Ib(t)。由于內壁影像是由氣缸蓋內壁每一點的計算結果疊加而成,那么就需要不斷改變熱場Ia(x,y;N),同時收集Ib(t),以獲得足夠的數據量。最后將收集完成的數據信息導入計算機,通過關聯運算重構出氣缸蓋內壁影像。
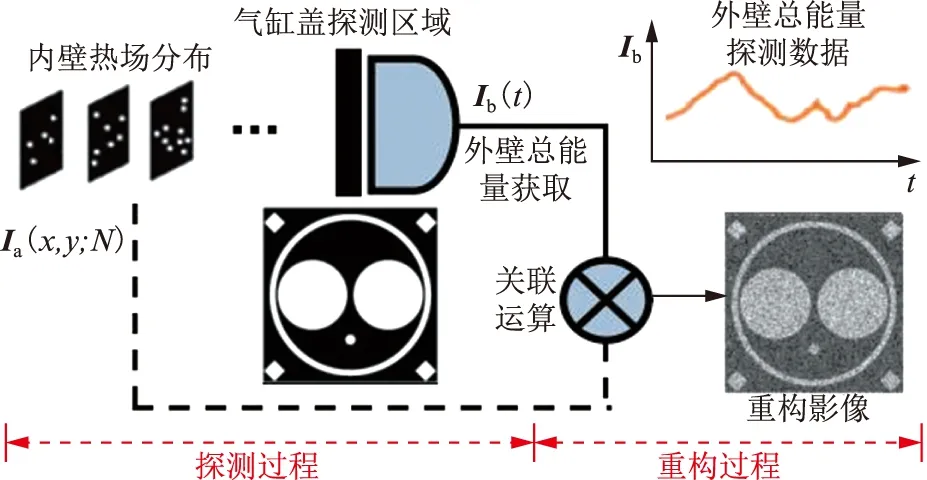
圖2 氣缸蓋熱場關聯成像原理圖
結合以上分析,將氣缸蓋底板熱透過系數函數用T(x,y)表示,那么熱場與氣缸蓋底板相互作用后的總能量值Ib可表示為式(2)形式。
(2)
再通過外壁總能量值Ib與探測的內壁熱場分布Ia(x,y) 相互關聯,重建目標對象TGI(x,y)如式(3)所示。
(3)

為獲得高質量的氣缸蓋內壁影像,整個探測過程需獲得多組不同的氣缸蓋內壁熱場分布Ia(x,y)及對應的外壁總能量值Ib,所需的數據可使用熱電偶在內燃機不同工況下按時刻連續收集。結合文獻[21-22],在氣缸加速工作再到減速工作這一過程中,通過氣缸蓋內壁不同區域的溫度場分布計算氣缸蓋內壁熱場分布。缸蓋內壁測點位置如圖3所示。由于氣缸蓋內壁溫度分布具有從中心沿徑向遞減的特點,以四氣門氣缸蓋為例,在各氣門圍繞的中間位置布置測點,其中點1~3為縱向從排氣門側向進氣門側分布的測點,點4~8為進排氣門間橫向分布的測點。圖4為各測點的溫度隨時間的變化曲線。

圖3 缸蓋內壁測點位置分布
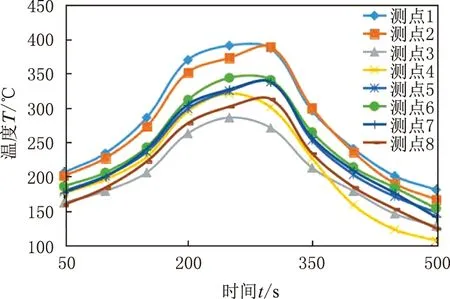
圖4 缸蓋不同位置測點的溫度變化曲線
分析圖4可知,在氣缸由加速工作到減速工作這一過程中,缸蓋內壁溫度隨著時間的推進呈現先上升后下降的連續變化,最高溫度約為400 ℃。但缸蓋內壁各測點的變化量是不同的,這樣的變化也體現為相應氣缸蓋內壁各點熱能不同,從而使得每次采集的熱場Ia(x,y)之間具有較大的差異性。本研究正是利用這樣的差異性特征為后續熱場矩陣的數據模擬及關聯成像技術的運用提供了基礎條件。
2 原理和方法
獲得高質量氣缸蓋內壁影像的關鍵在于數據的采集及關聯方法的選擇。數據采集的目的是獲取氣缸蓋內壁熱場分布及氣缸蓋外壁總能量值,為關聯成像提供足夠的計算數據。關聯方法會對關聯計算采用的數據量、關聯計算的時間及最終成像質量產生影響。
2.1 關聯數據的采集
由于氣缸蓋內壁分布的熱場可由氣缸蓋內壁的溫度分布情況計算,本研究中利用傳統的熱電偶測量方式對氣缸蓋熱場進行收集。內燃機運行由 700 r/min 加速至4 000 r/min,在這一過程中按不同時刻使用陣列式熱電偶對氣缸蓋內壁進行一系列的熱場收集;同時在氣缸蓋外壁區域布置貼片式熱敏電阻,將各個區域的能量值疊加作為氣缸蓋外壁的總能量值。在使用關聯成像對氣缸蓋影像進行計算獲取時,遵循“內壁熱場分布與氣缸蓋底板熱透過率函數的乘積等于氣缸蓋外壁總能量值”的原則,將系列的氣缸蓋內壁熱場與外壁總能量值一一對應。
選擇在不同工況下采集數據的主要原因為內燃機在不同轉速、不同功率及不同負荷的工況下工作時,氣缸蓋內壁受到的影響形式不同,會引起內壁熱場的分布變化較大,收集的數據組實現線性關聯運算時容易得到更多像素點位置的解,這將明顯提高重構影像的質量。
2.2 壓縮感知關聯成像法
采用壓縮感知關聯成像法[23]對探測的數據進行關聯計算能夠提高氣缸蓋內壁重構影像的質量。作為一種新型的信號處理方法,壓縮感知理論可在獲取可壓縮信號的同時重建稀疏信號,相較于奈奎斯特采樣理論,它通過開發信號的稀疏特性用隨機采樣獲取信號的離散數據樣本,提高數據間的不相干性,用較少的采樣次數通過非線性重建算法還原出氣缸蓋內壁重構影像。其關鍵在于信號的稀疏結構和不相關性。該過程涵蓋稀疏表示、壓縮觀測和信號優化重構3個部分。
使用壓縮感知關聯成像方法重構氣缸蓋內壁影像的過程如圖5所示,分為以下幾個步驟:(1) 將氣缸蓋底板熱透過系數T(x,y)(后文簡寫作T)展開為M×1的列向量,在稀疏變換域下表示為式(4)形式。

圖5 壓縮感知關聯成像方法重構氣缸蓋內壁影像步驟
T=ΨS
(4)
式中,稀疏矩陣Ψ為M×M維的正交完備基矩陣;S為T在稀疏矩陣Ψ上的系數矩陣。(2)選取N個適合的氣缸蓋內壁熱場強度分布矩陣Ia(x,y)按行展開并組合作為測量矩陣Φ,確保能最大限度保留信號T中的信息,大小為N×M(N?M)。那么,氣缸蓋外壁探測結果Ib可構成一個N×1的數據向量Ib,表示為式(5)形式。
Ib=ΦT=ΦΨS
(5)
(3)通過壓縮感知測量矩陣Φ重構信號,由Ib來關聯計算目標對象TCS,即可轉為求解最小l1范數下的最優化,滿足式(6)所示條件。
TCS=argmin‖ΨS‖l1s.t.Ib=ΦT=ΦΨS
(6)
根據正交匹配追蹤(orthogonal matching pursuit, OMP)算法,重構出稀疏系數S的近似解S′后,再由相應的正交稀疏基Ψ,通過公式(6)即可獲得氣缸蓋內壁信息T的近似解TCS,完成目標的重構。
3 仿真試驗分析
為了驗證氣缸蓋內壁關聯成像技術的有效性,本研究中選用了3幅128像素×128像素的氣缸蓋模型二值圖,即單缸雙氣門、單缸四氣門和雙缸雙氣門模型圖作為目標進行試驗。仿真中使用的N個熱場分布矩陣Ia(x,y)是由MATLAB軟件根據氣缸蓋內壁熱場分布規律區域性增強后隨機生成,氣缸蓋外壁探測結果Ib則通過式(5)獲得。對于氣缸蓋內壁區域的影像圖還原,只需使得像素點的尺寸遠小于探測區域,以保證氣缸蓋內壁影像的還原質量。這里為了客觀地評估重構的氣缸蓋內壁影像的質量,引入峰值信噪比(peak signal to noise ratio, PSNR)和結構相似性(structural similarity, SSIM)兩個指標進行定量分析,計算方法如式(7)和式(8)所示。
(7)
(8)
(9)
式中,IMSE為原始圖像與重構圖像的均方誤差(mean square error, MSE);f(x,y)與f′(x,y)為相同位置對應的第(i,j)個像素點的原圖和重構影像;M=n×m,為總像素點個數;T表示原圖像信息;T′表示重構影像信息;μT、μT′為T、T′的平均值;σT、σT′為T、T′的方差;σTT′為T、T′的協方差;c1、c2為常數,是為了避免分母為0而維持穩定。
圖6~圖8為單缸雙氣門、單缸四氣門和雙缸雙氣門氣缸蓋的二值模型圖及不同采樣次數下的重構影像圖。從圖中可以直觀看出,重構出的氣缸蓋內壁影像可將氣缸蓋內壁上進排氣門口、噴油孔、圓環凹槽及各受熱區域完整呈現,且隨著關聯計算采樣次數的逐漸增加,氣缸蓋內壁影像的清晰度也迅速提高。這是由于在達到全采樣前,每一次采樣數據都可能會為氣缸蓋內壁影像的重構補充有效信息,而隨關聯計算結果的不斷完善即圖片像素點數據的不斷補充,重構圖像也將越來越接近實際圖像。但關聯計算采樣次數增多的同時也增加了對大量的冗余信息的處理,會使計算時間大大延長。試驗結果表明,4組采樣次數下3種氣缸蓋模型圖的重構時間分別為143.4 s、263.8 s、379.7 s、509.9 s。根據以上分析,關聯成像的重構時間受到原模型圖像素尺寸大小及關聯計算采樣次數的影響而與氣缸蓋類型無關,因此在實際試驗時可選擇合適的采樣率以減少關聯計算消耗的時間。

圖6 單缸雙氣門模型圖及不同采樣次數下的重構影像圖
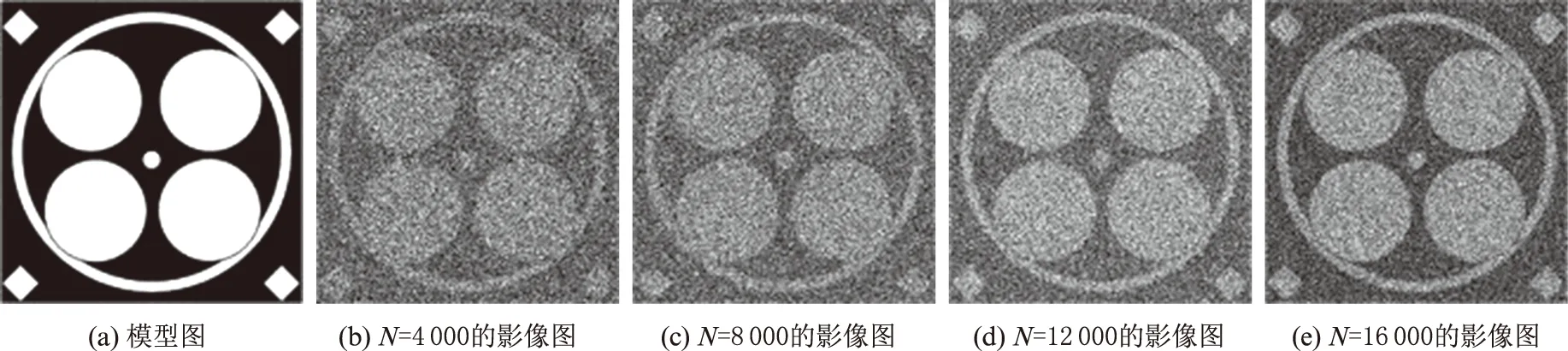
圖7 單缸四氣門模型圖及不同采樣次數下的重構影像圖

圖8 雙缸雙氣門模型圖及不同采樣次數下的重構影像圖
為了更好地體現方案的有效性,圖9給出了在不同采樣次數下氣缸蓋內壁影像的PSNR和SSIM兩個指標的曲線圖。峰值信噪比PSNR的大小可判斷重構圖像的失真程度,結構相似性SSIM指標則定量地從數值上評判重構圖像恢復的質量。由圖 9(a) 可知,在采樣次數達到4 000后,單缸雙氣門與單缸四氣門重構影像的PSNR在62 dB左右,雙缸雙氣門的PSNR則達到65 dB以上,且隨著采樣次數增加逐漸升高,PSNR數值升高,這代表著重構圖像的失真越來越小。再對圖9(b)中SSIM變化曲線進行分析,采樣次數低于4 000次時,關聯計算獲得的有效數據較多,結構相似性指標迅速上升,在采樣次數到達10 000次后,各像素點數據逐步完善,冗余信息較多,重構影像質量提升緩慢并趨于平衡。綜合兩項性能指標曲線圖分析,隨著采樣次數的增加,重構圖像的PSNR和SSIM都隨之提升,且采樣次數達到8 000次后,PSNR最高可達66 dB且SSIM的值也都在0.4以上,利于氣缸蓋影像的高質量重構。結合圖6~圖9進行分析,單缸雙氣門和單缸四氣門氣缸蓋的SSIM性能指標高于雙缸雙氣門,重構影像中雙缸雙氣門少部分區域對細節的顯現不夠完美。這是由于重構影像圖質量受到原圖尺寸大小、像素點個數及有效識別區域復雜程度的綜合限制,壓縮感知關聯成像法未能對每個像素點精確恢復,但總體效果仍比較理想。若使用更高像素的氣缸蓋模型圖并采集足夠多的試驗數據,那么還原的氣缸蓋內壁影像將更清晰,同時選擇更優化的關聯成像方法也會提升重構影像質量。

圖9 不同采樣次數下氣缸蓋內壁重建影像的性能指標曲線
氣缸蓋常見的損傷主要有變形、開裂及腐蝕,而對氣缸蓋內壁影像磨損區域進行分析時,主要考慮火力面的凹陷、裂紋和凸起損傷。在出現這些問題時,氣缸蓋底板上的熱能傳遞距離、溫度梯度、導熱系數等參數變化使得對應位置點的熱透過系數T(x,y) 發生改變,這也將直接顯現為磨損區域的重構影像變化。
為了通過仿真試驗驗證缸蓋磨損區域的評估的有效性,將各類氣缸蓋模型圖作缺陷處理,再對其進行模擬分析以驗證實際成像效果。圖10、圖11分別為單缸雙氣門和單缸四氣門氣缸蓋處理后的原模型圖及采樣次數為4 000次、8 000次、12 000次、16 000次的重構影像圖,對應的相同采樣次數下各組的重構時間平均為141.2 s、264.5 s、381.3 s、511.8 s。由于重構影像圖是通過關聯成像法求解計算出各像素點位置的數據并疊加還原得到的,那么為使磨損區域影像能夠清晰顯現,則要求構成氣缸蓋內壁區域的像素點個數足夠多,氣缸蓋內壁模型圖的像素尺寸就不能太小。根據圖10、圖11各組仿真試驗結果進行分析,單缸雙氣門氣缸蓋進排氣門間出現細小裂紋時的情況,4種采樣次數下的SSIM指標分別為0.366、0.396、0.413、0.424;單缸四氣門氣缸蓋表面出現氣泡等凸起或凹陷情況,4種采樣次數下的SSIM指標分別為0.375、0.408、0.417、0.436。從重構影像圖來看,可以清晰分辨氣缸蓋內壁的缺陷區域的位置和尺寸信息,為氣缸蓋內壁具體缺陷類型的判定提供了重要的依據。
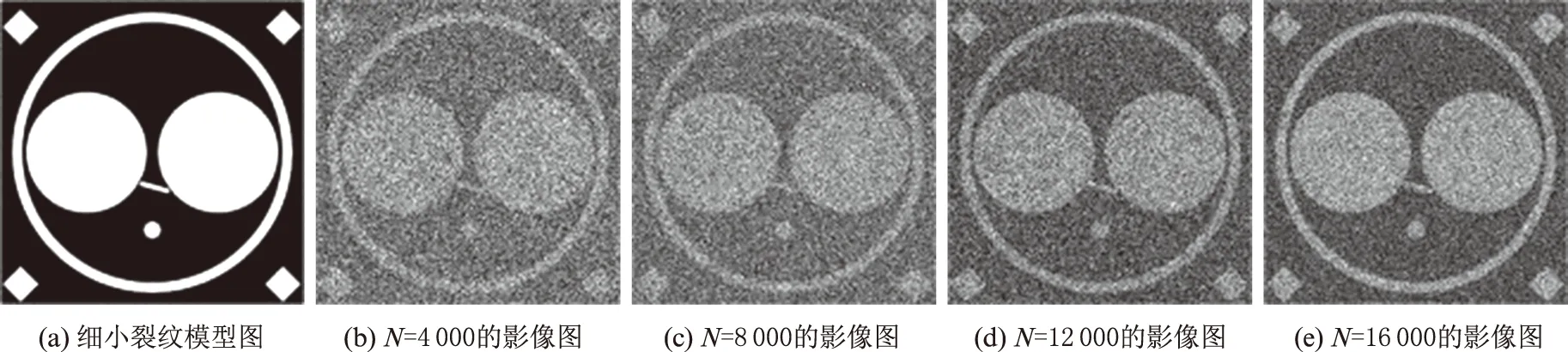
圖10 單缸雙氣門氣缸蓋磨損情況下的原模型圖及重構影像圖

圖11 單缸四氣門氣缸蓋磨損情況下的原模型圖及重構影像圖
4 結論
(1) 基于關聯成像的氣缸蓋內壁檢測方法能夠在氣缸運行過程中對氣缸蓋進行檢測,能直接呈現氣缸蓋內壁影像,直觀性強,利于氣缸蓋火力面的檢測分析。
(2) 對3種類型氣缸蓋重構影像的仿真試驗結果表明,相應的PSNR和SSIM指標可達66.79 dB、0.427。結合存在缺陷區域的氣缸蓋重構影像分析,關聯成像法仍能清晰地顯現內壁影像并能準確辨識缺陷區域信息。
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42