基于顯著性的遙感圖像艦船目標檢測
2021-12-10 08:30:28丁榮莉周飛宇
計算機仿真 2021年11期
丁榮莉,李 杰,沈 霽,周飛宇
(上海航天技術研究院,上海 201109)
1 引言
隨著光學載荷分辨率的不斷提高和成像質量的提升,可見光遙感圖像富含更豐富信息且能較真實的反應拍攝物體的形狀、顏色和紋理等特征。艦船作為海上主要運輸載體和重要軍事目標,其狀態掌控在軍艦探測、精確制導等軍用領域以及海面搜救、漁船監管等民用領域具有極其重要的戰略意義。可見光遙感圖像艦船目標檢測引起國內外學者的廣泛關注。
當前可見光遙感圖像艦船檢測算法可分為傳統目標檢測算法和基于深度學習的目標檢測算法兩類,其中傳統目標檢測算法的關鍵是通過人工設計特征將艦船從海洋背景中提取出來。文獻[1]基于海洋圖像灰度特性利用直方圖提取目標候選區域,并通過長寬比和致密性去除虛警,但虛警率仍不滿足實際需求。文獻[2]將艦船檢測問題視為在平穩變化的場景提取稀疏目標,提出了相位譜顯著性算法進行艦船目標檢測并取得較好檢測結果,但對于弱暗目標的檢測具有一定局限性。文獻[3]針對不同方向的船只檢測提出了一種求取旋轉滑動窗口的方向梯度直方圖(HOG)特征的方法來增加旋轉不變性,利用支持向量機(SVM)分類器對特征進行判斷從而提高檢測性能,但HOG特征維數龐大且小目標漏檢率高。隨著人工智能技術發展,文獻[4]提出一種將卷積神經網絡自主提取圖像特征與支持向量機分類器相結合的艦船目標檢測方法,由于遙感圖像獲取困難,文中采用民船作為輔助樣本對軍艦進行檢測。文獻[5]設計了一個更加適合遙感圖像目標識別的卷積神經網絡,利用卷積淺層特征和卷積深層特征的融合來提升網絡的識別性能,取得較高的準確率和召回率。
上述傳統算法在復雜背景環境下檢測性能不理想,而基于深度學習的檢測算法需豐富樣本進行訓練且算法復雜度高。針對此本文提出粗檢測和細鑒別相結合的技術路線以在高檢測率的前提下降低算法復雜度,如圖1所示。

圖1 艦船方向劃分
粗檢測利用艦船目標與海洋背景的差異提取可能存在艦船目標的候選區域,細鑒別根據艦船與其它干擾因素的差別剔除候選區域虛警,提取出真正的艦船目標。
在進行海洋遙感圖像艦船檢測時,圖像中可能存在陸地區域,由于陸地地貌環境的復雜性和地面物體的多樣性,使得艦船檢測難度大和虛警率高,因此首先采用基于GIS庫的海陸分割算法對存在陸地的圖像進行海陸分割以去除陸地區域。針對純海洋圖像首先采用譜殘差法盡可能不遺漏對獲取艦船目標候選區域,而后統計其S-HOG表征目標信息對艦船進行鑒別。
2 候選區域提取
視覺顯著性模型能夠模擬人腦機制,對周圍復雜場景進行快速感知和綜合判定。將圖像中最能體現圖像內容和吸引視覺注意力的目標區域稱為顯著性區域,其具有如下特征:1)局部差異性,顯著性區域總是與周圍區域存在明顯特征差異;2)全局稀少性,在整幅圖像中,大部分都是重復和冗余的背景區域,而顯著區域特征出現的頻率較低;3)高層語義特征,在自然場景中觀察時,人總會經常注意的目標如人、船等往往是顯著目標。
根據光學遙感圖像特點,將人類視覺系統可快速聚焦于顯著性區域的特性引入到艦船目標候選區域的提取中。自然圖像統計特性具有尺度不變性,即自然圖像集合的平均傅里葉譜的幅值服從1/f規律,不同圖像數據的log譜具有相似的分布趨勢,只需要關注其差異部分即顯著性區域,忽略相似部分去除冗余信息。
對圖像進行傅里葉變換將圖像信息從時域轉換到頻域,其頻譜表達式所示
F(u,v)=A(u,v)exp[iP(u,v)]
(1)
其中,F(u,v)表示圖像傅里葉變換的頻譜,A(u,v)表示圖像的幅度譜,P(u,v)表示圖像的相位譜。
SR譜殘差[6]顯著性模型將顯著信息定義為輸入圖像的對數幅度譜log(A(u,v))與其平均對數幅度譜之間的差值,如式(2)所示
R(u,v)=L(u,v)-hn*L(u,v)
(2)
其中hn為局部均值濾波器對圖像log譜進行平滑,接下來通過傅里葉反變換在時域重建圖像即得到其顯著性映射圖。

(3)
g(x,y)為二維高斯濾波器對圖像顯著性映射圖進行平滑,顯著性映射圖可增強目標與背景對比度,接下來可通過自適應閾值分割得到目標前景信息,閾值取值如下
T=u+cσ
(4)
其中u為圖像的均值,σ為圖像的方差,c為經驗系數。自適應閾值分割后可得到艦船目標的候選區域圖像如圖2所示。
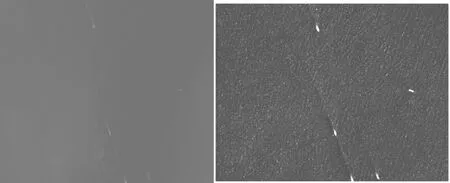
圖2 遙感圖像和其SR顯著性映射二值化圖像
從圖中可以看出SR算法能有效提取出目標的候選區域,同時受海雜波影響存在較多的噪點。當艦船部分灰度與海洋背景相近時,二值化前景結果中可能存在孔洞,導致候選區域的連通性較差。為便于后續的艦船細鑒別,可先采用膨脹算法填充連通域孔洞,再利用腐蝕算法去除圖像噪點。譜殘差法對圖像進行顯著性映射適用于不同分辨率的海洋圖像和不同像素點尺度的艦船目標。
3 S-HOG原理
遙感圖像數據中可能存在與艦船目標相似的干擾如碎云、島嶼、波浪等,導致候選區域提取結果中除艦船目標外可能存在虛警,因此需要進一步提取艦船目標本身特征從而鑒別目標、剔除虛警。通過分析艦船目標與虛警目標特征的差異性,提出采取S-HOG特征進行艦船目標鑒別和虛警剔除。
3.1 PCA規則化目標切片
PCA主成分分析方法常用數據降維,通過線性變換將原始數據映射為一組各維度線性無關的表示,可用于提取數據的主要特征分量。
因S-HOG方向區間的特殊劃分和判別條件的設置,要求切片目標的長軸與豎直方向平行,而遙感圖像中艦船目標常為任意方向,因此需首先對目標候選區域進行規則化。艦船呈細長幾何對稱性質,目標像素點集中分布在艦船主軸方向上,可通過PCA計算目標像素點的最大方差方向即艦船第一主軸方向,得到目標與豎直方向夾角并旋轉使其和豎直軸方向保持平行。對顯著性映射得到的目標候選區域提取其8連通域得到疑似目標切片像素點個數為N,每個像素點可由二維坐標向量表示
(5)
若目標與豎直方向夾角為θ,變換后的新坐標系為Y1-Y2,則目標像素點的集合在新坐標系中表示如式(6)所示,由此得到規則化目標切片。

(6)
3.2 S-HOG
梯度方向直方圖(Histogram of Oriented Gridients,HOG)特征最早由Dalal等在CVPR-2005提出,是一種用于表征圖像局部梯度方向和梯度強度分布特性的描述符從而廣泛被用于物體目標檢測。基于HOG原理,根據艦船幾何和紋理特征以及遙感載荷成像特點,提出了S-HOG艦船鑒別算法。按圖 3將艦船切片梯度方向劃分為8個特定區間1D-8D,以8個方向區間序號為直方圖橫軸,以對應方向區間的梯度幅值累加值為縱軸統計其S-HOG特征[7]。

圖3 S-HOG方向劃分
為更有效的剔除和艦船相似的偽目標,將艦船切片分為B1、B2和B3三部分計算其艦船梯度方向特直方圖征,艦船切片分塊方法如圖4所示,艦船整體切片為B1,切片水平均勻分割為B2和B3上下兩部分。

圖4 艦船方向劃分
艦船呈長條狀對稱分布且垂直方向幅值變換較大可推測bin1和bin5統計值應高于其它bins且bin1和bin5對稱分布。艦船、碎云和島嶼切片的梯度方向直方圖特征如圖5所示。

圖5 切片S-HOG特征
從上圖可以看出,相比于碎云和島嶼等容易造成虛警的物體,艦船的方向梯度直方圖基本符合理論分析。因衛星載荷成像受光照的影響以及圖像中存在海雜波的干擾,bin1和bin5統計值近似等高,有一定的偏差。根據梯度方向直方圖特征設置式(7)-(9)進行艦船鑒別。

(7)

(8)

(9)

基于S-HOG特征的艦船鑒別算法不受圖像和艦船目標尺寸限制,具有較高的魯棒性且對圖像分辨率有一定的自適應性。
4 實驗結果
為驗證上述算法的檢測性能,對4k*4k大小的GF-2圖像進行切片裁剪構建數據集。圖像分別率為2米,經過圖像內容篩選和目標標定得到200張512*512圖像切片,共包含82只艦船目標。圖像數據集的背景包括無云平靜圖像、無云風浪圖像和有云圖像。
為評估算法性能,給出常用評價指標準確率和虛警率定義,計算公式如下
Far=fp/(tp+fp)
(10)
Cr=tp/nops
(11)
其中Cr表示檢測的準確率,Far表示虛警率,npos表示圖像中真實艦船目標個數,tp表示正確檢測到艦船目標的個數,fp表示檢測到的虛警個數。
對圖像數據集進行艦船目標檢測,部分檢測結果如圖6所示。

圖6 艦船檢測結果
從檢測結果圖可以看出不同背景條件下、尺度不同的艦船均能被準確檢出并標記,且能有效剔除碎云和島嶼等形態相似干擾物的影響,算法檢測性能好、抗干擾能力強。
將圖像數據集的艦船目標分為大艦船(長度大于50像素)和小艦船(長度在10~50像素之間)兩類,分別統計其目標檢測結果。并將算法檢測性能與文獻[2]的PFT算法進行比較,具體結果如表1所示。

表1 艦船檢測結果
根據艦船檢測統計表可以看出,本文算法能較理想的檢測出大艦船目標,但當艦船所占像素點較少且海面背景環境復雜時,顯著性映射結果不理想,小艦船檢測準確率相比大艦船有所下降。同時算法抗干擾能力強,虛警率較低。PFT算法在艦船目標與背景對比度較低時可能會產生漏檢,其采用艦船面積進行艦船鑒別的虛警率較高。綜上,相比于PFT算法,文中算法采用SR算法進行顯著性映射的圖像增強效果更好,艦船檢測率更高,且能有效剔除碎云和島嶼等形態相似物的干擾、抑制風浪造成的海雜波干擾,顯著降低了艦船檢測的虛警率。
5 總結
為了提高復雜海面背景下可見光遙感圖像艦船檢測的性能,本文提出了一種基于顯著性的檢測算法。首先采用譜殘差法對圖像進行顯著性映射并通過自適應閾值分割得到目標前景二值化圖像,從而提取艦船目標候選區域,然后對候選區域進行規則化并統計其S-HOG特征進行艦船鑒別。實驗結果表明顯著性映射算法能有效提取疑似目標的候選區域,算法檢測精度高,同時S-HOG特征能有效從疑似目標中提取出真正的艦船目標,算法虛警率低。該算法可以有效克服海雜波、碎云、島嶼等因素的干擾且適用于不同尺寸的艦船目標檢測,但當海面有波浪時弱暗目標的檢測性能需進一步提高。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
