二點五米高巨型機器人誕生能拿“金箍棒”還能“修鐵路”
2021-12-07 16:47:28
海外星云 2021年17期

約2.5米高的機器人是什么概念?
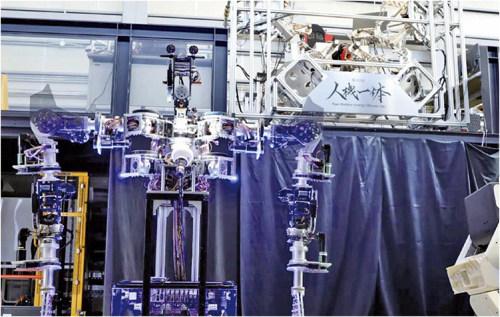
它共有兩個版本,分別是“三手指”版本和“鐵鏟手”版本。如下圖,它手中拿著一個氣球,并用兩個類似眼睛的小相機環顧四周。
它的名字叫“零式人機”,身上沒有任何皮膚,裝在一個鋁合金機身中,它擁有軀干、手臂和頭部, 頭部很小甚至比手掌還小。

另一個版本的機器人,每只手有3個手指來抓握物體。在測試期間,它能抓住聚合物棍棒和足球。
綜合來看,它是一款用觸覺裝置控制的超大型機器人,研發人員還為其開發了一種人機協同效應裝置。

機器人位于一個高平臺上,操作者則在幾米遠的地方,戴著一款虛擬現實(VR)頭盔來控制機器人,頭盔上帶有不同操縱桿。這樣,操作員的任何動作,都會立即由機器人表現出來。通過這些感官數據,當操作人員移動手臂時,機器人就會做出類似動作。
據悉,這是日本一家名為Man-MachineSynergy Effectors研發的機器人,創始人是金岡博士,此前他在日本立命館大學機器人系任教。
廣東工業大學自動化學院黃之峰副教授表示:“這很科幻,機器人可在復雜非結構化環境實現搬運等任務,而搖操作也是目前比較現實的做法。這么大的機器人實現人機協同操作,系統集成的復雜度很高。”

既能握足球,也能手持“金箍棒”
由圖可知, 這是一種由觸覺設備控制的巨型人形機器人,與我們平時看到的人形機器人并不相同。在特殊情況下,類人機器人確實需要更大尺寸,也正因此它們在建筑工地和自然災害地區非常有幫助。
機器人最重要的部分是手,如下圖,它能握持棍子和足球。組裝機器人時,工作人員將一個人形上身機器人,附著在一個大型機械臂的尖端,伴隨著工作人員在地面控制臺的指揮,機器人就像在太空中飛來飛去一樣自由工作。
據悉,“零式人機”專為繁重的工作、裝配線、救援或探索任務而設計,這些工作人類往往無法完成。它還能進行高空重型機械化作業,其搭載的力控技術和功率放大控制技術,可實現在高處執行高負荷任務。
在鐵路維修等艱難環境中,它能輕松地拿起重型物品。事實上,該公司并不算一家“萌新”企業,其成立于2007年。
創始團隊很早就意識到,這種能舉起大重量物品的巨型機器人是未來的趨勢之一,他們認為這類機器人將經常出現在各種工廠中,也會被相關機構用于勘探或救援工作。
在那些需要人類攀爬并具備一定風險的工作中,“零式人機”還具有提高工作效率、消除職業事故風險、確保安全的優勢。這樣一來,人類只需在安全舒適的環境中操作機器人,讓“零式人機”去從事繁重勞動即可。
不過,本身也從事此類機器人研究的黃之峰表示:“這款機器人的挑戰點目測有兩個:一是動力學模型,本身機械臂太重了,如果再加上末端抓取重物,這時沒有很好的動力學模型做配合,操作員要想進行靈活操作會很困難。
二是這家公司或許應該更詳盡地考慮雙臂運動過程的實時避障規劃,這其中又分為兩點:其一需要更多的傳感器來實現全局視角信息的獲取;其二要考慮搖操作過程中如何把碰撞信息反饋給操作員。”

曾設想將機器人用于福島第一核電站災后處理
創始人金岡博士此前留校任教的立命館大學,是日本第一所開設機器人系的大學,也是一所積極進行產學合作的大學。
他獨立倡導了人機協同效應器的概念,二十余年來一直在研究機器人安裝技術。

他成立這家公司,是為了社會中實施先進機器人技術,公司也綜合了金岡博士的理念、以及機器人控制工程技術,并成為一家由日本立命館大學孵化的創業公司。
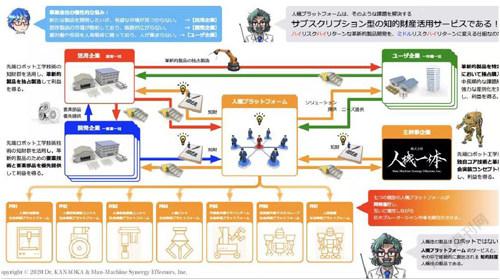
盡管“ 零式人機” 在這兩年才開始更加出名, 但該公司已有14年歷史。Man-Machine Synergy公司位于日本滋賀縣草津市,它沒有庫存、沒有生產線,而是與那些存在難以解決的問題的公司合作。

他把這種獨特商業模式成為“人機平臺”,并與一兩家大公司合作實現了這一商業模式。目前,他已把七個平臺設想為人機平臺,其余六個人機平臺正在等待實施。
該公司之所以選擇上述商業模式,也和金岡博士一段“屈辱”的經歷有關。

2011年3月11日,日本發生大地震。金岡博士原本希望這些機器人,能在福島第一核電站事故現場發揮積極作用,結果卻毫無用處,根本沒有產生預期效果。
這次“事件”讓他強烈感受到機器人技術的無能為力,但他沒有放棄,并繼續研究和開發先進的機器人技術,終于在2014迎來轉機。

當時,“零式人機”機器人研發的前期探索基本完成,同時他也找到了此前失敗的原因— — 機器人的控制力比想象中困難得多。
也就是說,機器人雖然可通過有限動作在一定程度上控制力,但尚未達到人機融合的需要。
日后,金岡博士提出了操縱力理念,其中不僅包括簡單地施加一種單向確定的力,還包括對不可預測的外力做出適當的反應。
具體來說,轉矩可以帶來旋轉力、并能控制電機,電機產生的轉矩、與輸入轉矩的指令值相匹配。由于電機電流和產生的轉矩幾乎成正比,所以一般通過控制電機的電流來控制轉矩。
以人類日常生活中的簡單動作開門和關門為例,開門的任務包括三個動作:首先握住門把手,然后轉動門把手,最后圍繞鉸鏈打開門。
這對一個不假思索就能掌控力氣的人來說非常簡單,然而用工業機器人來完成這項工作并不容易,首先它需要測量門的尺寸和鉸鏈位置,然后通過某種方式提前測量門把手的形狀和運動。
期間,必須分解一個個動作,并將系列動作放到機器人中, 比如準確地抓住門把手,準確地圍繞旋轉軸轉動,然后沿著以鉸鏈為中心的弧線移動。
如果機器人稍微多移動一點,它就會打破門,而這正是金岡博士提倡的動力操控技術正是要攻克上述難題。
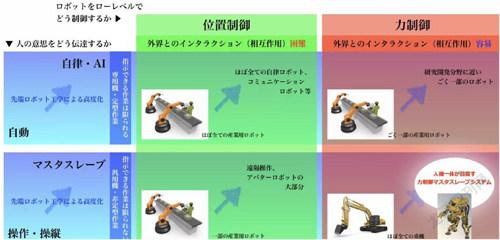
下圖是他繪制的機器人圖,圖片的上半部分是“自主型”,它是一種通過預先編寫程序,并根據程序進行操作的方法;下半部分是“操作控制型”,人類可以實時操作并靈活執行程序以外的任務。

按需生產機器人,避免貨砸手里
如今,金岡博士走的是先獲取客戶、再定制產品的路線, 其一可以按需生產機器人,其二還可避免盲目生產,導致貨砸在手里。
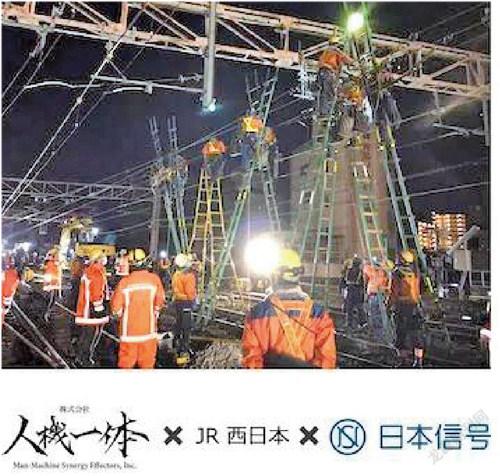
目前該公司已和兩家日本公司JR West和Nippon Signal合作,實現人機平臺的早期商業化。

JR West是一家鐵路公司,該公司的主要業務之一是在夜間維護鐵路架空線。以前,技術工人要在高海拔地區從事這項工作,但有了“零式人機”機器人,即可在偏遠地區代替人工。
金岡博士表示,JR West公司對鐵路的安全運營有著強烈的使命感和責任感。而他和公司該做的是提供可行的解決方案,而不單單是提供一個單一技術。
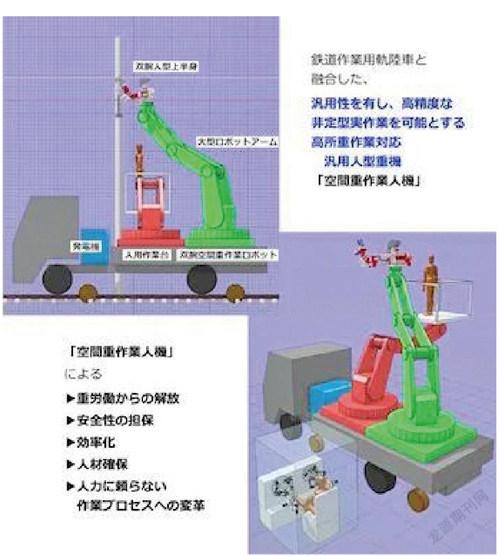
如下圖,這是該公司和JR West公司合作的通用人形重型機械“太空重工”的PoC原型,目前尚未作為產品完成。
此外,自2021年7月1日起,該公司已開始生產和銷售原始人形重型機器“零式人機”的動作玩偶和立體模型。該人偶是3D打印機制作的人偶,以1/35的比例再現了“零式人機”。

2021年末,金岡博士預計將開始一項驗證測試,屆時機器人將使用工具擰緊螺絲,并能執行噴漆動作,測試成功之后,“零式人機”即可參與軌道上架空電線的維護工作。
2025年,金岡博士還將推出接近人形的重型機器。該公司表示,屆時該機器人可將“力漸進雙邊控制”技術與人機相結合,機器人可根據人的直覺意圖執行任務。該公司希望在2025年大阪-關西世博會舉行時,將這款機器人投入實際運行。
據悉,它旨在在危險場所工作,包括在核電站處理危險化學品的設施。在與日本石油供應商Eneos的聯合試運行期間,機器人成功將燒杯中的液體倒入量筒,并用手推動進行運輸。 (綜合整理報道)(編輯/克珂)
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小哥白尼(神奇星球)(2020年7期)2021-01-18 05:07:16
娃娃樂園·綜合智能(2019年7期)2019-08-26 09:38:48
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
快樂語文(2016年15期)2016-11-07 09:46:39
中國現當代社會文化訪談錄(2016年0期)2016-09-26 08:46:32
小學生導刊(低年級)(2016年8期)2016-09-24 07:43:42