哈佛大學微型機器人實驗室研究出壓電雙晶片多足機器人
2021-12-07 16:52:42
海外星云 2021年17期

哈佛大學微型機器人實驗室的羅伯特·伍德教授曾介紹過一種多節段的多足類微型機器人,相關論文題為《多節段足微型機器人》 。
該微型機器人使用壓電雙晶片作為驅動,體積為3.5厘米x 3.5厘米,重量為750毫克,與一般的六足微型機器人相比,該類型機器人在攀爬、實現多功能性和穩定性方面具有潛在優勢。
多節段機器人的運動優勢
多節段機器人其設計靈感來源于自然界中的多足動物,這類機器人相比于傳統的形態的優勢體現在:
1 .速度:雖然如蟑螂和其他六足昆蟲的每秒最大運動距離可以達到40倍~50倍自身體長,蜈蚣的每秒的最大運動距離約為10倍自身體長;然而,蜈蚣仍然是敏捷的爬行昆蟲之一,其能夠捕捉蟑螂和甚至更大的昆蟲和哺乳動物。除了利用自身肢體起伏來放大步長之外,蜈蚣肢體固有的靈活性使它們能夠在平面上自由移動,使蜈蚣微型機器人在崎嶇地形上前進和換向時比同尺寸的傳統剛體六足機器人更快。
2 .運動穩定性:由于蜈蚣又稱百足蟲,自身有大量腿(特定的物種最大能達到191條),這在運動上的體現為運動步態豐富并且增加了運動的穩定性。
3 .高的運動靈敏性和魯棒性:有研究專家發現當切除蜈蚣一定數量的腿后,其運動能力( 包括步態、速度和穩定性) 變化不大,這表明多節段機器人可能對故障具有魯棒性。得益于肢體的靈活性,蜈蚣可以從水平表面移動到垂直表面,而步態不會發生劇烈的變化。因此,這類型機器人附節段數的增加,機器人的運動也更加靈敏。
4 .通用性:可以通過增加和去除蜈蚣機器人的節段,以更好地執行不同的任務,可以適用于不同的場合。
但目前制造這類型機器人的難題體現在于,由于微小型機器人的尺寸差異和存在著加工誤差,這對機器人的運動難以預測,而且接線一般也是手工焊接的,這種方式費時又不可靠。為了解決這些問題,作者在本研究提出了一種布線方式,并且創建了對應的動力學模型,配合樣機實驗,對機器人運動的實現了較吻合的預測。
壓電雙晶片多足機器人的設計和工作原理
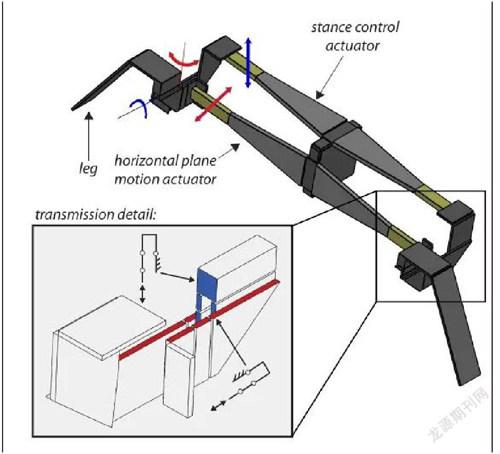
對比壓電驅動器(PEA)和形狀記憶合金(SMA)驅動器,形狀記憶合金驅動器的頻率帶寬低于壓電驅動器,限制微型機器人的步進激勵頻率。因此在本項研究當中,多足機器人采用了壓電雙晶片作為驅動器,分別布置在垂直和水平方向上, 以分別實現驅動足的前進/后退,以及升高/降低驅動腳的步進運動。
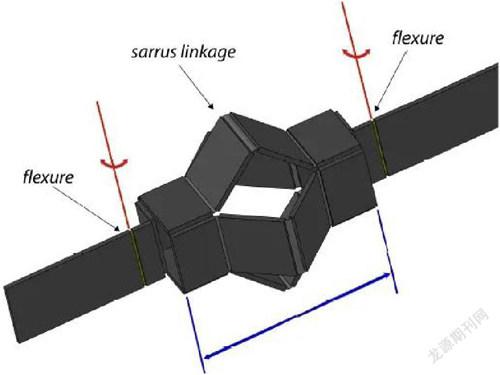
而多節段機器人由多個單節段機器人組成,其中由Sarrus機構將多個節段的機構相連。Sarrus機構是1853年由法國數學家薩魯斯所發明的一種古典機械機構。
這種機構能夠將有限的圓周運動轉換為直線運動的機械聯動裝置,可以將直線運動轉換為標準的旋轉運動。Sarrus機構是一種空間機構,有時也稱為“空間曲柄機構”。它能通過自身構型的變化,實現設備由空間機構向平面機構的轉化,從而大大減小自身所占空間。
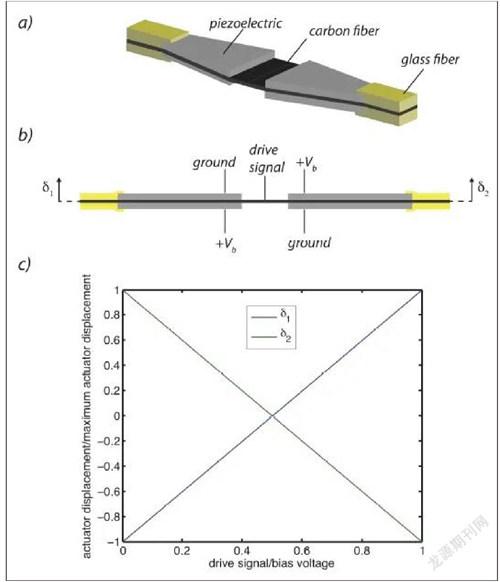
在接線上,多足機器人每個節段有兩個壓電雙晶片驅動器,分別實現機器人的站立和腿部的旋轉運動, 因此需要兩個驅動信號。其中,兩個壓電雙晶片驅動器共享一個接地和驅動信號。
每個壓電雙晶片驅動器的兩側極性相反,換言之,通過每個壓電雙晶片驅動器僅使用一個驅動信號,就可以實現當機器人的一條腿升起時,另一條腿則預緊于地面上。
類似的,控制水平方向的壓電雙晶片驅動器可以實現前后運動。如此一來,通過控制電壓信號,即可實現對機器人的空間運動控制。
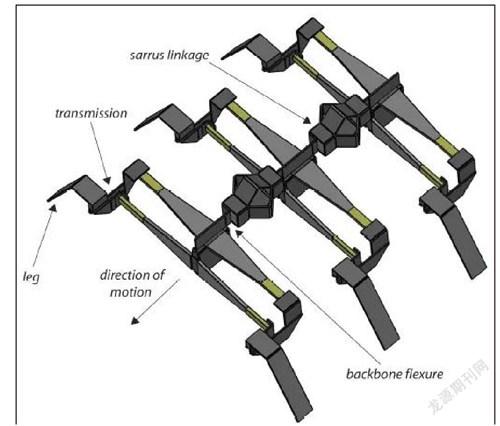
為了保持運動的靜態穩定性,作者在本設計中組裝了3節段驅動器的微型機器人。并且利用銅跡線大大減少了硅膠線的數量。由于機器人體積小,驅動器的脆性不能施加方波信號,因為信號的瞬時變化會損壞壓電驅動器。
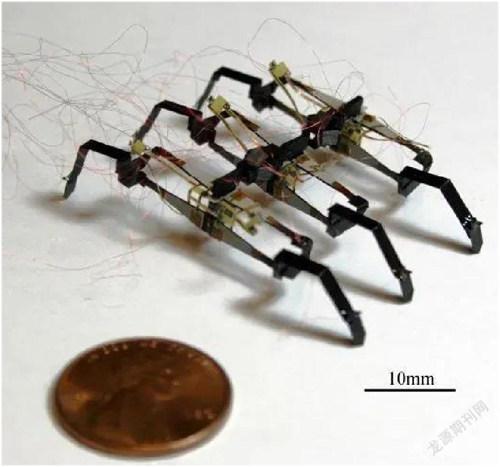
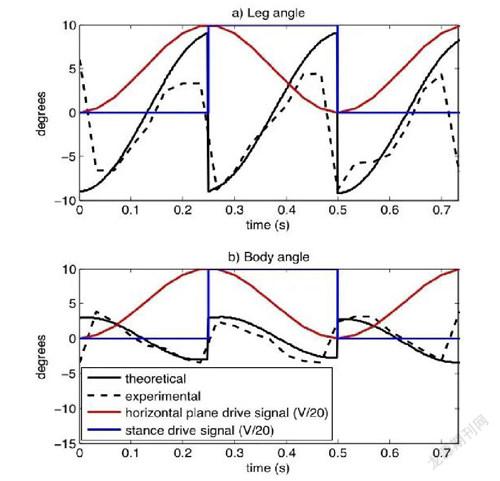
為了實現激勵, 作者施加了幅值為200伏 ,頻率為2赫茲的正弦驅動信號,站立腳和擺動腳在水平面運動在正弦驅動信號的峰值處切換方向。
其中,提取了中間段的實驗腿和節干角度與動力學模型,可以看出,實驗值和理論值非常吻合,證明了動力學模型的有效性。
同時,因為驅動腳的切換不是瞬時的,所以運動存在著耦合的現象(即向前/向后運動時, 會產生向左或者向后偏移的情況) 。在實驗結果當中, 當激勵頻率為2Hz時,機器人10秒內前進了約為自身的體長的距離,運動步長介于0.75毫米~1毫米之間。
該項研究提出的壓電微型多足機器人為與制造、控制、攀爬和建模相關的研究人員提供了啟發,也極大的增強了多足機器人的運動能力,擴展了其應用場景,如應用于搜索和救援任務、危險環境探索和監視的場合當中,具有很高的研究前景和市場前景。(綜合整理報道)(編輯/多洛米)
猜你喜歡
電子器件(2021年4期)2021-10-26 12:27:18
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年8期)2018-11-25 07:42:16
電子工業專用設備(2016年8期)2016-08-24 09:39:59
電子世界(2016年22期)2016-03-12 22:15:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
超硬材料工程(2016年1期)2016-02-28 22:20:04
海軍航空大學學報(2015年3期)2015-11-11 17:20:00