穴盤苗自動移苗設備設計與試驗系統分析與試驗*
2021-12-06 09:07:56朱春燕顧小小解安東李長興張樣平
農業工程技術 2021年25期
關鍵詞:設備
朱春燕,李 偉,顧小小,解安東,李長興,張樣平
(1.上海市農業機械研究所,上海 201106;2.安徽工業大學智能裝備技術研究院,安徽馬鞍山 243002;3.上海綠立方農業發展有限公司,上海 201210)
近年來,隨著育苗技術的迅速發展,穴盤育苗技術可實現集中管理溫室育苗,移栽幼苗無損傷,復種指數高,經濟效益顯著[1],在農業上得到廣泛應用。穴盤苗移栽是設施工廠化生產中的重要環節[2],可以縮短作物的生長發育期,錯開成熟期,提高產量[3]。在蔬菜工廠化生產中,穴盤苗移栽屬于勞動密集型作業,通常需要花費較多的人工與時間成本,作業標準也相對較為嚴格。自動移苗設備的研發能有效解決目前生產中存在的成本高、效率低、可靠性差等問題,對提升蔬菜工廠化生產水平具有重要意義。移苗機構作為自動移苗設備的關鍵執行部件,對設備的移苗效果及工廠化生產的效率有著決定性的影響。
發達國家對移栽機的研究起步較早[4]。1987年,L.J.Kutz 等[5]科研團隊研發設計第一個被應用到苗圃植物移栽項目的機器人。1991 年,Yang Y 等人[6]設計四自由度SCARA 工業機器人,配置配備力學傳感器的滑動針夾持器。1996 年,Takashi 等[7]發明了一套自動化移栽系統,并引入托杯轉移過渡缽苗。2001 年,K.H.Ryu 團隊設計的全自動移苗機搭配了視覺系統對穴孔秧苗生長狀態進行檢測[8]。美國RAPID 公司生產的RTW 系列穴盤苗全自動移苗機可實現多穴盤同時抓取[9]。20 世紀90 年代,國內開始溫室缽苗移栽機械的研究。吉林工業大學研制出針對空氣整根營養缽育苗移栽系統[10]。1996 年,范云翔等[11]研制可將空氣整根秧盤育出的秧苗自動移栽到生長用的塑料大盤中的溫室全自動移栽機。2009年,邱立春等[12]發明了一種采用輸送帶傳輸,機械臂末端并聯安裝多個移栽機械手進行移栽作業的穴盤苗移栽機。2015 年,韓綠化等[13]設計了一種穴盤苗移栽機兩指四針錯夾式取苗末端執行器。然而,受定位精準度,抓取效率,生產成本等因素的制約,國內穴盤苗移栽裝備自動化程度低、成本高,結構復雜,可靠性差,尚無法適應蔬菜工廠化生產的實際要求,因此未獲得廣泛應用[14-17]。
移苗設備結構和工作原理
整機結構和工作原理
自動移苗設備結構如圖1 所示,采用單元模塊化設計,主要包括種植盤庫、轉接裝置、輸送裝置和移苗裝置,其中移苗裝置為關鍵部件,通過桁架結構連接在種植盤庫與轉接裝置之間。根據蔬菜工廠化生產移苗作業要求,確定移苗設備系統主要工作參數和性能指標如表1 所示。

表1 設備系統主要工作參數和性能指標

圖1 自動移苗設備結構圖
設備啟動前,人工將種植盤擺放至種植盤庫中,使種植盤均勻地填充在種植盤隔槽中。設備啟動后雙臂機械手復位到原點;種植盤庫中托架升降機構工作,將最底層種植盤送至轉接臺中的種植盤輸送裝置上;種植盤輸出裝置接到信號后將種植盤運輸到限位裝置處等待機械手抓取;育苗盤輸送裝置運送育苗盤到指定位置;直線模組工作,驅動雙臂移動至限定位置;調距氣缸保持縮的狀態,驅動抓手移動至育苗盤處;夾爪氣缸伸縮,夾爪夾住種植杯;直線模組驅動雙臂將抓手移至輸送裝置上的種植盤處;調距氣缸伸長,分配盤沿軌跡向上運動,調整夾爪間距,夾爪氣缸伸長,夾爪松開種植杯,將種植杯放至種植盤限位裝置處的種植盤中。
移苗裝置結構和工作原理
移苗裝置由抓手和直線模組組件構成。其中抓手由滑軌、抓手連接板、抓杯連接板、夾爪氣缸、夾爪、調距氣缸、氣缸連接、抓手分配盤、Z 軸連接板組成,結構示意圖如圖2 所示。直線模組組件由X1 軸、X2 軸、Y1 軸、-Y2 軸、Z1 軸、Z2 軸、桁架組成,結構示意圖如圖3 所示,單軸直線模組由同步帶、直線導軌、滑臺、電機、光電開關等組成。
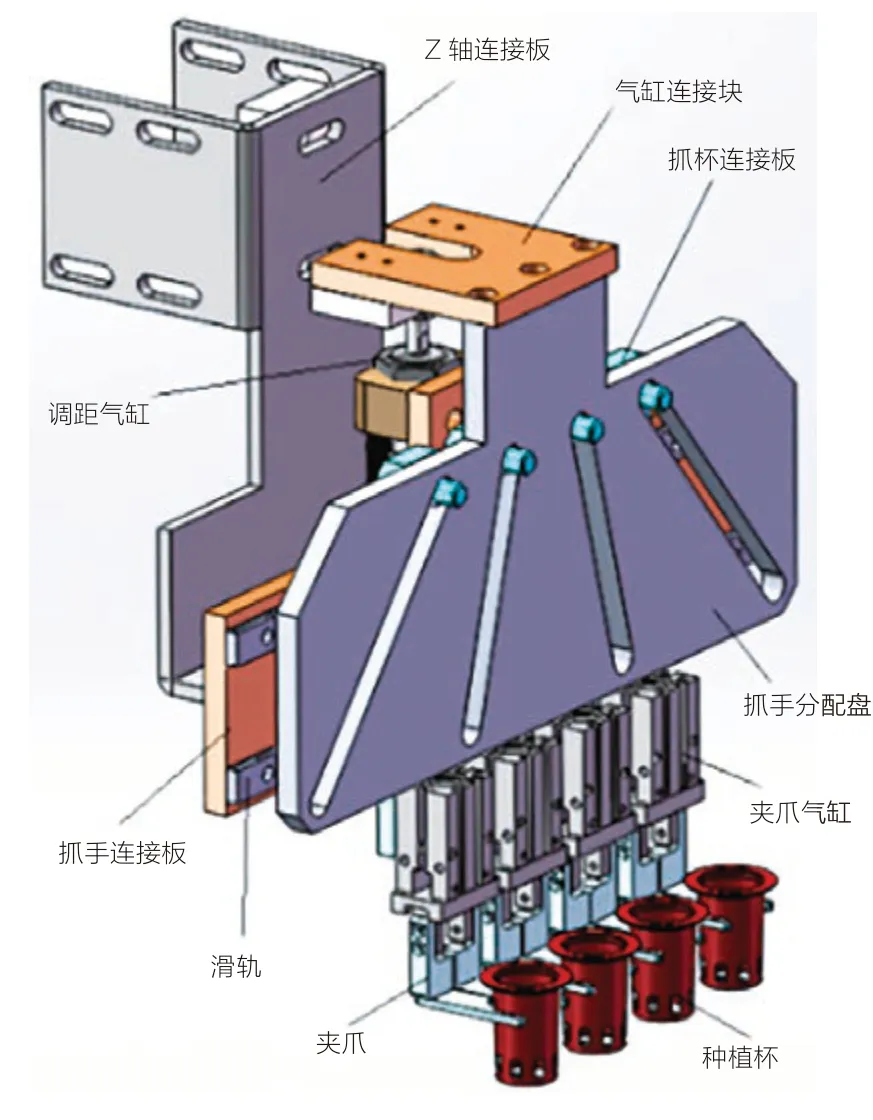
圖2 抓手結構示意圖
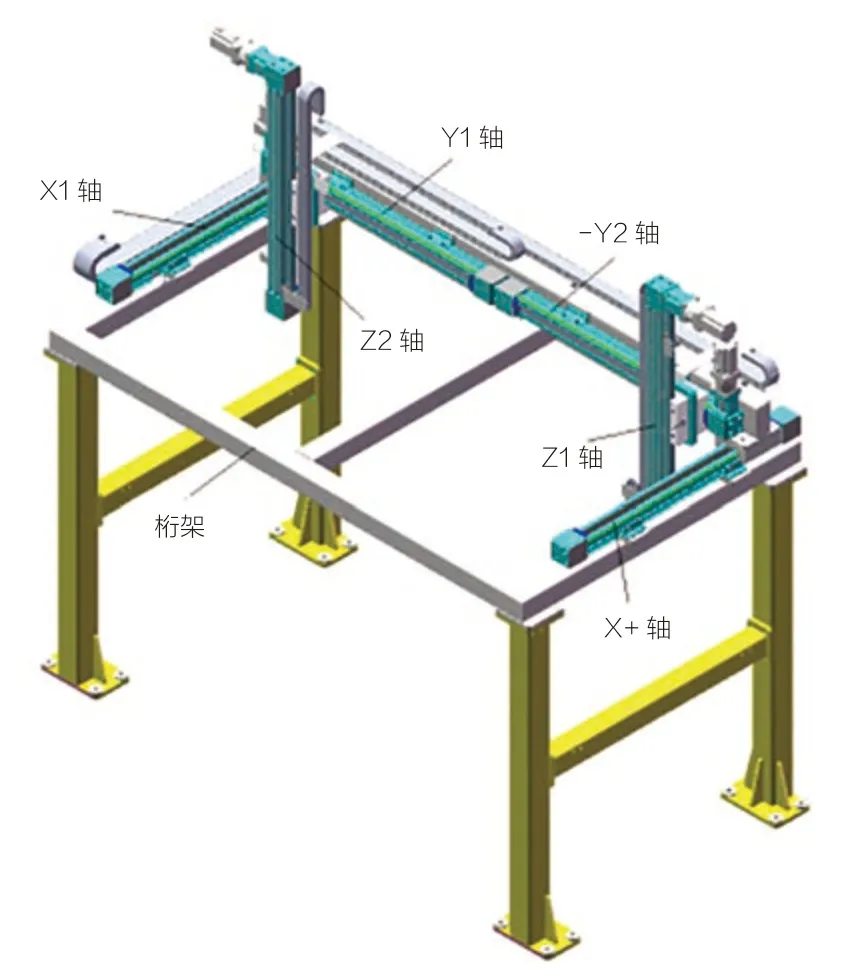
圖3 桁架直線模組結構示意圖
用螺栓和螺釘等緊固件將所有相關零件進行裝配,構成抓手部件;沿抓手連接板長度方向安裝滑軌,多個滑塊配合安裝在滑軌上;每個滑塊固定連接一個抓杯連接板,每個抓杯連接板連接一個夾爪氣缸,每個夾爪氣缸連接一對夾爪,夾爪氣缸伸縮控制夾爪松開和夾緊種植杯。調距氣缸的頂端連接氣缸連接塊,氣缸連接塊與抓手分配盤固定連接,抓手分配盤上設置多組滑道,相鄰滑道間距離一致,相鄰的抓杯連接板通過抓手分配盤的上下運動實現橫向運動,以實現一次性多個種植杯的精準移栽。用螺栓將Z 軸直線模組通過Z 軸滑臺固定于Y 軸直線導軌;用螺栓將Y軸和X 軸直線模組通過軸Y 軸、X 軸滑臺固定于桁架,構成桁架直線模組組件。抓手部件通過-Z軸連接板用螺栓固定于Z 軸模組導軌,構成移苗設備移苗裝置,對種植杯進行精準移位、夾持和投放。
空氣壓縮機提供氣源,啟動設備,雙臂機械手、育苗盤、種植盤復位;Y 軸電機驅動雙臂機械手沿Y 軸相向運動至育苗盤上方;夾爪氣缸收縮,夾爪夾住種植杯;Z 軸電機驅動雙臂機械手沿Z+軸運動,種植杯離開育苗盤;先X 軸電機驅動雙臂機械手沿X+軸運動,后Y 軸電機驅動雙臂機械手沿Y 軸相向運動,機械手定位至種植盤上方;抓手氣缸(調距氣缸)收縮,進行種植杯等距調整,調整后種植杯中心距與種植盤孔穴中心距保持一致;Z 軸電機驅動雙臂機械手沿Z-軸運動,種植杯底部距種植盤上方8 mm;夾爪氣缸收縮,夾爪投放種植杯;抓手氣缸(調距氣缸)收縮,將種植杯間距調還原至初,還原后種植杯中心距與育苗盤孔穴中心距保持一致;Z 軸電機驅動雙臂機械手沿Z+軸運動40 mm;先Y 軸電機驅動雙臂機械手沿Y 軸相背運動,后X 軸電機驅動雙臂機械手沿X-軸移動至育苗盤下一組孔穴定位點。
移苗過程運動學分析
移苗臂運動學模型
移苗過程中,為保持設備作業的同步性和平衡性,設計雙臂機械手結構簡圖如圖4 所示。根據移苗軌跡,X、Y、Z 模組形成的機械臂進行有序直線運動。
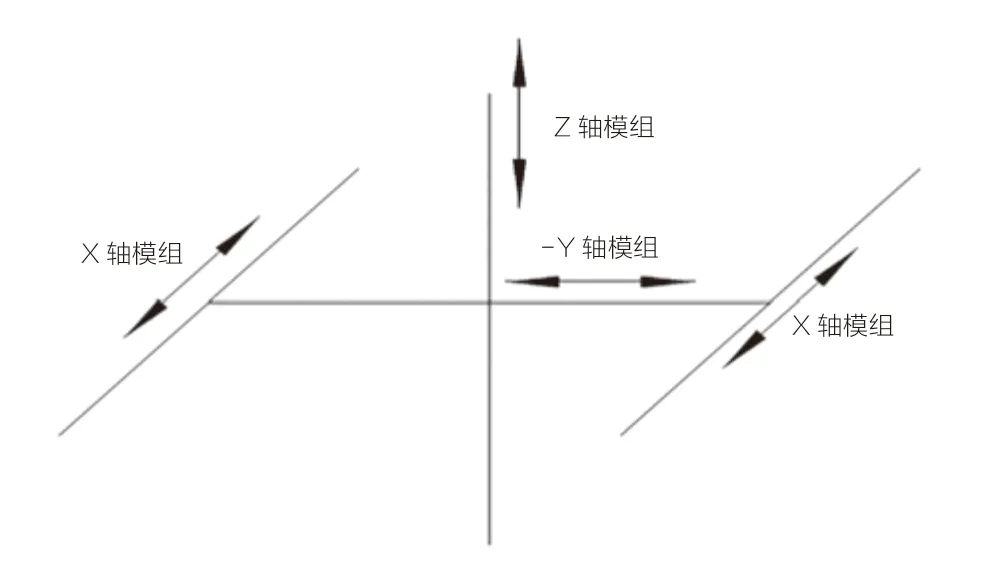
圖4 雙臂機械手結構簡圖
如圖5 所示,裝置主要完成從96 穴育苗盤到8 穴種植盤的自動移苗。參照蔬菜工廠化生產栽培床單元布局擺放育苗盤和種植盤,左機械臂對應#Ⅰ育苗盤及#Ⅰ-1、#Ⅰ-2、#Ⅰ-3 種植盤,右機械臂對應# Ⅱ育苗盤及# Ⅱ-1、# Ⅱ-2、# Ⅱ-3 種植盤。
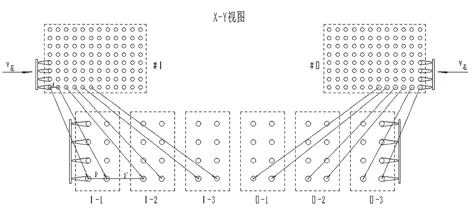
圖5 移苗布局圖
取苗進程與回程,投苗進程與回程所形成的相對運動軌跡分別相同。機械臂處于育苗盤上方時,抓手對種植杯進行夾持;機械臂處于種植盤上方時,抓手對種植杯進行投放。三維空間運動軌跡如圖6 所示,實線為取苗投苗路徑,取苗與投苗進程,移苗機械臂形成的偏角為0°或180°;虛線為取苗與投苗回程,偏角與取苗點和投苗點位置相關。
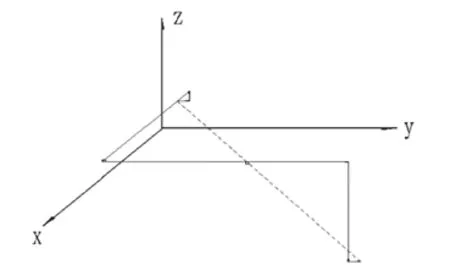
圖6 機械臂三維空間運動軌跡
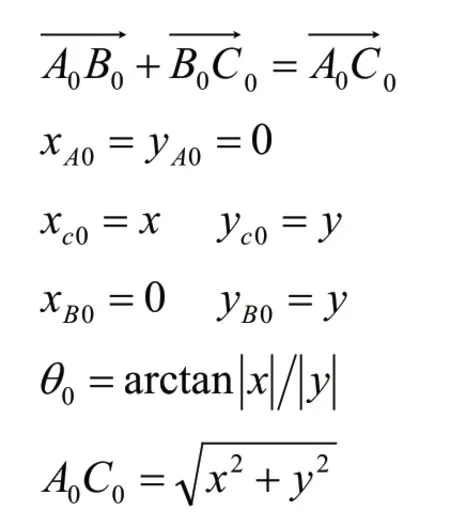
以左機械臂為例,xy 平面,投苗階段,# Ⅰ育苗盤位置(取苗點) 為A,# Ⅰ-1 種植盤位置(初投苗點)C。如圖7 所示,建立矢量封閉方程,。
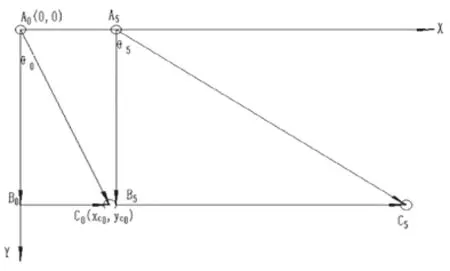
圖7 矢量位移圖
建立坐標系,將矢量式轉換為解析式,得出移苗臂位移方程與偏角θ。
如圖5 所示,d 為育苗盤穴孔中心距,D 為種植盤穴孔中心距,D’為相鄰種植盤穴孔中心距。

移苗臂結構參數分析
根據位移方程及運動軌跡,移苗過程中,機械臂需完成X、Y、Z 方向直線運動,選用線性模組,根據育苗盤及種植盤位置確定線性模組形程≤1000 mm,對移苗設備進行三維建模,不斷緊湊優化直線行程,確定X 軸和X+軸沿托盤輸送線方向水平直線行程為800 mm,Y1軸和Y2 軸沿垂直于托盤輸送線方向水平直線行程為800 mm,Z1 軸和Z2 軸沿豎直方向上下直線運動行程為700 mm。
通過物性分析計算得出,X 軸需承受負載4.82 kg,Y 軸需承受負載 6.77 kg,Z 軸需承受負載29.47 kg。根據以上參數,選擇本體寬度為80 的同步帶直線模組,技術參數見表2。X 軸電機直連,Y1、Z1 軸和Y2、Z2 軸電機分別采用電機右折和電機左折方式連接。

表2 80 型同步帶直線模組技術參數
移苗過程動力學模型
夾持力力學模型
抓手設計最重要的是夾爪夾持力大小的控制,夾持力過大會導致種植杯受損,夾持力過小會導致無法取出種植杯或在夾持輸送過程中種植杯掉落。在抓手夾爪移苗過程中,夾持力的分析可以分為兩個階段:第1 階段是夾爪定位后將種植杯從育苗盤孔穴中拔起時的夾持力,這一階段受力比較復雜,種植杯受到夾爪的夾持力、拔起過程中的慣性力、種植杯本身的重力和育苗盤孔穴內壁對種植杯的阻力,根據拔起過程中種植杯的運動特點建立力學模型如圖8 所示;第2 階段是種植杯完全脫離育苗盤孔穴并在夾爪輸送時的夾持力,這一階段受力比較簡單,種植杯僅受到夾爪的夾持力和種植杯本身的重力,且此時的夾持力小于第1 階段的夾持力。如果第1 階段的夾持力滿足工作需求,則此夾持力肯定滿足第2 階段的工作需求,因此只研究第1 階段的夾持力。

圖8 夾持力力學模型
通過力學模型進行受力分析可得,

式中,F1——夾持力
F2——拔起力
F3——孔穴壁阻力
Fa——慣性力
G——種植杯重力(帶苗)
μ——種植杯與夾爪之間摩擦系數
種植杯取出時孔穴壁與種植杯之間的摩擦力計算比較復雜,因此將孔穴壁與種植杯之間的最大靜摩擦力作為孔穴壁與種植杯之間的摩擦力。取孔穴深度h 一半徑為r 的微圓盤,則摩擦力為

式中,d ——種植杯直徑
μ——種植杯與孔穴壁最大靜摩擦因數
γ——育苗盤材料的比重
ν——泊松比
h——孔穴深度
z——孔穴深度
種植杯為圓管狀,種植杯與孔穴相交處直徑作為種植杯直徑;育苗盤材料的比重指的是塑料的相對密度,ν為10780 N/m3;泊松比指的是塑料橫向變形的彈性常數,查詢得ν取0.394;種植杯與孔穴壁最大靜摩擦因數μ取0.18。
由式(1)和(3)聯立得:
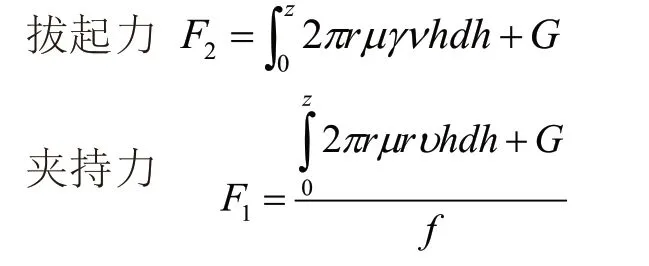
由夾持力公式計算,得出夾爪取苗夾持力2 N。
取苗末端執行器參數分析
基于蔬菜工廠化生產模式,移苗主體為種植杯,設計圓管狀種植杯,杯沿直徑35 mm,杯沿下方直徑約27 mm,確定夾爪夾持點為杯沿下方,故夾爪開閉行程差 Δ S ≤8 mm,;根據夾爪尺寸設計,夾持點距離L 為30 mm,偏心距距離H 為24.5 mm。綜上所述,確定夾爪氣缸ATC-HFZ 型復動型氣動手指氣缸,主、側試圖如圖9 所示。
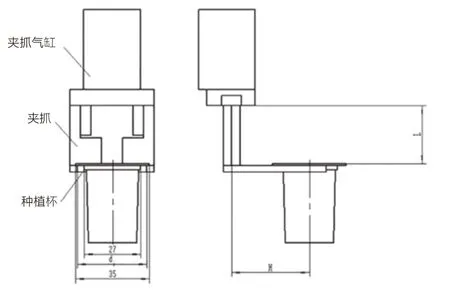
圖9 取苗夾爪工作狀態
查閱ATC-HFZ 系列產品概覽可知,當氣動手指氣缸缸徑為16 時,理論閉合夾持力34 N,張開夾持力45 N;開閉行程(兩側)為6 mm,符合夾爪開閉行程差 設計要求;氣壓為0.5 MPa時,手指氣缸提供的理論夾持力為34 N,滿足夾持力2 N 需求,且對種植杯的夾持負載程度相對較輕,因此選取夾爪氣缸缸徑16 mm。
育苗盤和種植盤尺寸如表3,移苗裝置從育苗盤中取苗移至種植盤,需對穴孔中心距進行調整即等距調整夾爪距離。調距氣缸控制抓杯連接板在抓手分配上做小于120 mm 豎直方向往復運動,實現夾爪水平方向等距調整。綜上所述,選擇ATC-MA 型不銹鋼迷你氣缸,氣缸帶動抓杯連接板運動軌跡示意圖如圖10 所示。

圖10 抓杯連接板運動軌跡示意圖

表3 育苗盤、種植盤尺寸規格
移苗設備運行速度0.3 m/s,查詢氣缸負載率和氣缸運動速度關系表,取負載率為40%。空壓機額定排氣壓力0.7 MPa,氣缸工作壓力P 取0.5 MPa。調距氣缸垂直安裝,取安全系數k為2,調距氣缸主要推動連接塊和抓手分配盤運動,物性計算得質量為1.25 kg。
氣缸負載力

氣缸理論推力

氣缸缸徑

查閱ATC-MA 系列產品概覽可知,當迷你氣缸缸徑為20 mm 時,標準行程有小于120 mm,符合抓手分配盤尺寸要求;氣壓為0.5 MPa 時,押側及拉側力大于184.7 N、219.8 N,滿足推押力大于125 N 需求,且對等距機構作用程度相對較輕,因此選取調距氣缸缸徑20 mm。
試驗與分析
試驗條件及方法
在上海孫橋現代農業園區進行移苗效果測試,測試速度和成功率。測試環境溫度23.6~26.6 ℃,環境濕度44.2%~49.4%。移栽植株品種為生菜,苗齡為14 天,單株平均重量(含種植杯和基質)為4.8 g,尺寸(高度× 寬度)為37 mm×33 mm。利用秒表對移苗設備的執行情況做連續觀測。抓手精準夾取種植杯,準確投入種植盤穴孔內視為移栽成功。
試驗結果與分析
試驗測試移苗裝置得速度及成功率,即從左右機械臂完成定位開始,至設備完成育苗盤中48個種植杯(單機械臂完成3 組種植盤)的抓取、移位、投放動作作為一個測試周期,測試在不同的調速脈沖參數值下的移苗速度,每種調速脈沖值下測試3 次,取算術平均值(表4)。

表4 不同調速脈沖參數值下平均移栽速度及移栽成功率測試結果表
由測試可知,隨著脈沖參數的提升,移栽速度幾乎呈線性上升,在調速脈沖值為80000 的情況下,移栽速度最快,平均可達90 棵/min。所有調速脈沖值下平均移栽成功率為97.27%。移栽成功率與移栽速度之間沒有顯著相關性,在調速脈沖值為60000 的情況下,移栽成功率最高。移苗設備在不同調速脈沖值參數下,移苗裝置運行速度穩定、平穩,沒有異常振動,設育苗盤、種植盤定位準確,抓手能精準抓取種植杯,種植杯能精準投入種植盤孔穴內。
結論
(1)設計了一種線性模組與抓手組合結構,根據育苗盤、種植盤要求,確定移苗裝置各構建尺寸關系,構建移苗臂運動模型,得出位移方程即運動軌跡,確定線性模組運動參數:X 方向水平直線行程為800 mm,Y 方向水平直線行程為800 mm,Z 方向上下直線運動行程為700 mm,選型80 型同步帶直線模組。
(2)構建夾持力力學模型,確定種植杯夾持力2 N,取苗末端執行器調距氣缸缸徑為16 mm,夾爪氣缸缸徑為20 mm。
(3)根據試驗分析,設備在不同調速脈沖值參數下,平均移栽成功率97.27%,移苗速度的最大誤差為+2 s,在誤差允許范圍±3 s 內,滿足設計要求,驗證移苗裝置設計得可行性。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00