可擴展耳蝸鼓階模型設(shè)計
2021-12-05 08:54:38王佐黎建軍吳擁真郭家偉韓飛坡王小甜
中國醫(yī)療器械雜志 2021年6期
【作 者】王佐,黎建軍,吳擁真,郭家偉,韓飛坡,王小甜
1 馬鞍山學(xué)院,馬鞍山市,243100
2 中國計量大學(xué),杭州市,310018
3 復(fù)旦大學(xué)附屬眼耳鼻喉科醫(yī)院,上海市,200031
0 引言
人工耳蝸是目前運用最成功的生物醫(yī)學(xué)工程裝置,已經(jīng)作為治療神經(jīng)性聽力障礙的常規(guī)方法。研究表明,人工耳蝸植入可以達到平均80%的句子理解率,而助聽器的理解率僅10%[1]。人工耳蝸植入是極其精巧、復(fù)雜的手術(shù),醫(yī)生需要將電極植入至約2周半的蝸狀內(nèi)耳耳蝸中。在人工耳蝸植入手術(shù)過程中,醫(yī)生全憑手感與經(jīng)驗進行植入角度和植入力的調(diào)整與控制,而人類力覺感知最小分辨率約為25 mN[2-3],極大地增加了植入手術(shù)的操作難度。因此,醫(yī)生需要通過大量的植入訓(xùn)練來積累經(jīng)驗。
在人工耳蝸植入訓(xùn)練和實驗中,通常使用耳蝸或鼓階模型代替尸體耳蝸標(biāo)本。早期REBSCHER等[4]通過制作尸體耳蝸標(biāo)本的模型鑄件來開發(fā)透明人體鼓階模型。該模型通過耳蝸標(biāo)本澆鑄而成,可提供準(zhǔn)確的尺寸,但是在沒有物理模具的情況下無法重復(fù)獲得。目前,世界三大人工耳蝸電極研發(fā)制造公司開發(fā)了耳蝸模型用于電極植入實驗。澳大利亞Cochlear公司設(shè)計了一款平面模型用于電極植入研究[5]。該模型未反映耳蝸真實三維結(jié)構(gòu),且未體現(xiàn)鼓階螺旋形狀。奧地利MED-EL的三維耳蝸模型具有螺旋形狀,但是從模型圖像來看,該模型并未真實體現(xiàn)鼓階通道的幾何特征和尺寸,如通道逐漸變細,且文獻中并未介紹該模型是否參考耳蝸真實形狀、尺寸參數(shù)。此外,該模型的植入深度不超過1.25圈[6-8]。美國Advanced Bionics設(shè)計了一款1:1比例的耳蝸模型,電極最多可在其通道中植入兩圈,但是該模型制造工藝復(fù)雜,實物制備困難。為此,提出一種可擴展鼓階模型設(shè)計方法,克服了以上模型設(shè)計的局限性。基于已公布的耳蝸解剖學(xué)數(shù)據(jù),確定鼓階通道平均尺寸來進行模型設(shè)計,且該模型可以借助常用工程軟件和常用材料進行任意擴展與復(fù)制,以滿足研究需求。
1 可擴展耳蝸鼓階模型設(shè)計原理
可擴展耳蝸鼓階模型設(shè)計流程,如圖1所示。首先,確定鼓階模型中心線;然后,基于臨床文獻資料獲取鼓階通道尺寸,設(shè)計鼓階通道輪廓;最后,沿模型中心線確定鼓階通道輪廓位置,通過工程設(shè)計的方法生成鼓階模型,該模型可以根據(jù)所需比例進行擴展。該鼓階模型設(shè)計方法克服了當(dāng)前鼓階模型的局限性,并具有以下特點:
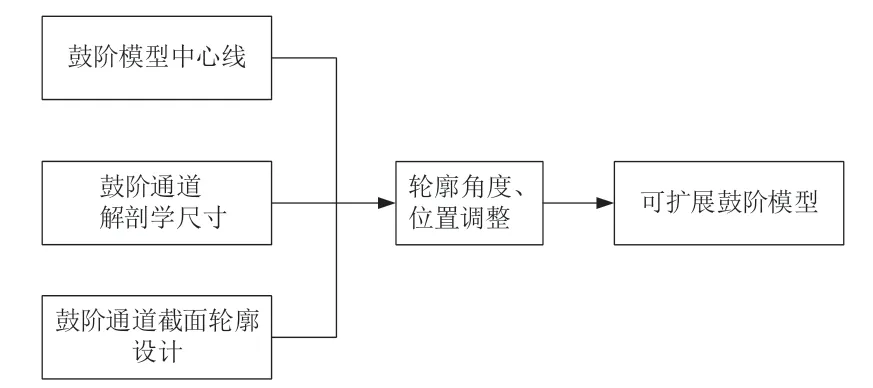
圖1 可擴展鼓階模型設(shè)計流程Fig.1 Design flow chart of scalable scala tympani model
(1)可擴展性:該模型能夠以任意比例進行擴展,以滿足研究需求。
(2)準(zhǔn)確性:該模型是基于已公布的耳蝸解剖學(xué)數(shù)據(jù),確定鼓階通道平均尺寸來進行模型設(shè)計。
(3)重復(fù)性:該模型可以借助常用工程軟件和常用材料進行復(fù)制。
2 可擴展耳蝸鼓階模型設(shè)計
2.1 鼓階模型中心曲線
參考文獻[9]中,Cohen對30名人工耳蝸植入患者和9組顳骨標(biāo)本的X光片進行分析,得到了鼓階中電極陣列角度位置,并且使用軟件將每個陣列的數(shù)據(jù)擬合成螺旋曲線。該研究團隊發(fā)現(xiàn),植入陣列的平面螺旋形狀可以通過數(shù)學(xué)函數(shù)建模。Cohen通過數(shù)學(xué)方法擬合得到數(shù)學(xué)模型,并以其作為耳蝸中心線進行耳蝸三維建模,其在極坐標(biāo)系下的數(shù)學(xué)表達式為:

式中,R為螺旋中心的徑向距離,θ為水平夾角,A、B、C、D、θ0和θf為常數(shù)。

式中,z是每個離散螺旋點的高度值,E是常數(shù),θ1是起始角度。
通過參數(shù)識別,常數(shù)A是尺寸參數(shù),常數(shù)B控制最小平均誤差,常數(shù)D和θ0控制平面耳蝸中心曲線圓窗位置。常數(shù)C通過兩個公式在θ=100o時進行推算;常數(shù)E為高度參數(shù),當(dāng)θ0和θf固定時,可確定耳蝸平均高度z=2.75 mm。鼓階模型中心曲線參數(shù)值,如表1所示。

表1 鼓階模型中心曲線參數(shù)值Tab.1 Parameter value of central curve of scala tympani model
結(jié)合表1中列出的參數(shù)值,沿著曲線離散點R的值可通過等式計算,將其導(dǎo)入Matlab中創(chuàng)建1:1比例的鼓階模型通道中心曲線,如圖2所示。其中θ范圍為(10.3o,910.3o),增量為0.1o。對于θ的每個值,基于式(1)、(2)和(3)計算曲線上相應(yīng)點的三維空間坐標(biāo)(x,y,z)。其中,s為縮放因子,可用于擴展鼓階模型,例如,s=2將創(chuàng)建2:1比例模型。
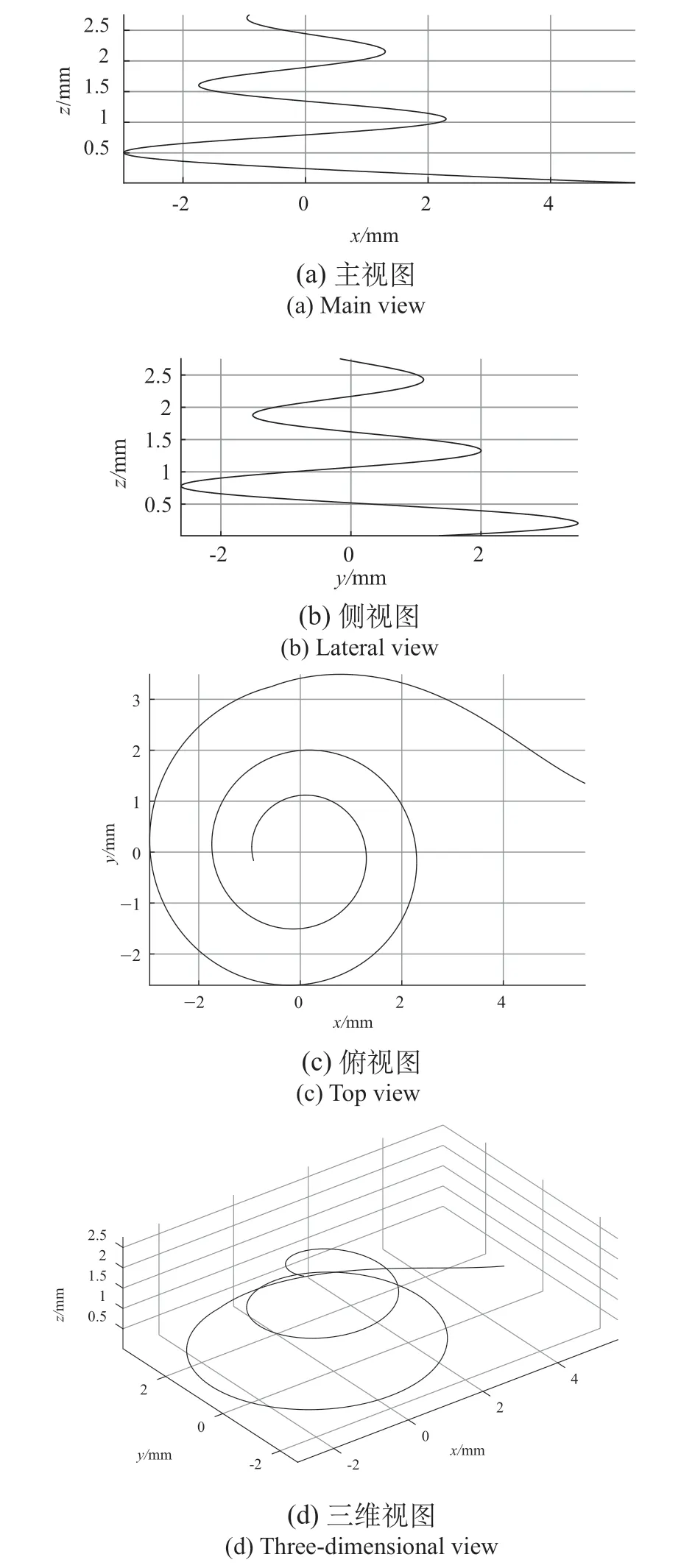
圖2 鼓階模型中心曲線Fig.2 Central curve of scala tympani model

2.2 鼓階通道輪廓
基于采集到的耳蝸解剖學(xué)切片圖像,對耳蝸鼓階結(jié)構(gòu)及其通道輪廓形狀進行研究分析,將耳蝸鼓階通道輪廓形狀近似為橢圓。如圖3所示,橢圓不僅能夠很好地反映鼓階通道輪廓形狀,橢圓的長軸和短軸還可以分別代表鼓階通道的寬度和高度尺寸參數(shù)。模型設(shè)計過程中,基于臨床解剖學(xué)數(shù)據(jù)確定鼓階通道寬度和高度尺寸參數(shù)[10]。
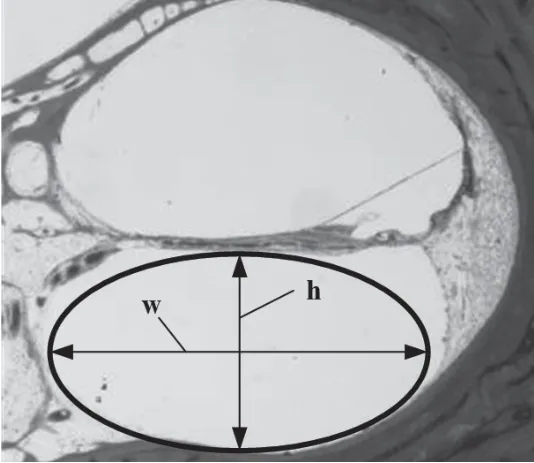
圖3 鼓階通道輪廓近似圖Fig.3 Approximate profile of scala tympani channel
如圖4(a)為人體耳蝸解剖學(xué)切片圖像,在圖像中手動確定耳蝸中心軸,使耳蝸截面分布于中心軸的兩側(cè),基于已有的鼓階尺寸將鼓階通道輪廓近似為橢圓。依據(jù)耳蝸實際螺旋形狀,調(diào)整鼓階截面與軸線的角度,使鼓階通道輪廓與中軸線之間具有一定傾斜角度。在每個鼓階通道輪廓上設(shè)定x-y平面和截面中心軸之間的輪廓傾斜角,以近似在許多耳蝸截面視圖中觀察到的角度,其中鼓階通道輪廓寬度方向不垂直于耳蝸中心螺旋軸,如圖4(b)所示。
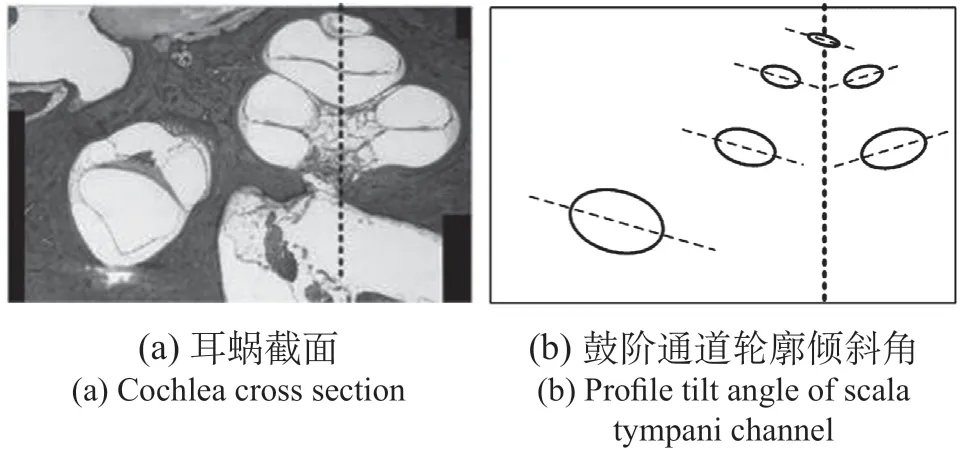
圖4 鼓階通道輪廓及其傾斜角Fig.4 Profile and inclination of scala tympani channel
圖5所示為鼓階通道輪廓示例圖,其中,角度φ相對于x-y平面定義。鼓階模型設(shè)計所使用的角度φ來自臨床解剖學(xué)數(shù)據(jù)。基于橢圓方程創(chuàng)建鼓階通道輪廓,輪廓中心為(0,0),輪廓上的每個點由以下方程式計算確定:
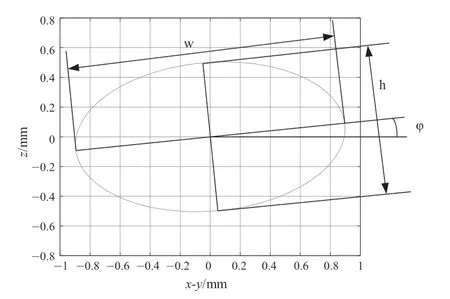
圖5 鼓階通道輪廓示例圖Fig.5 Profile image of scala tympani channel
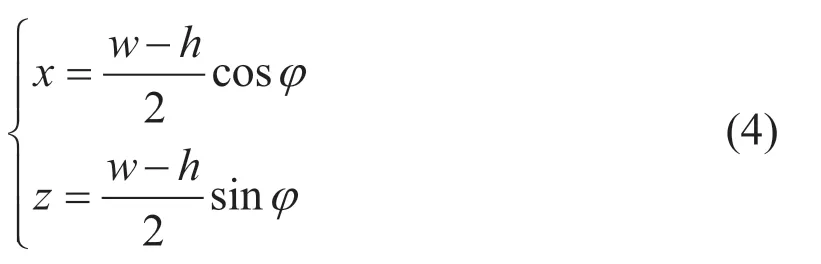
式中,w和h分別為給定輪廓的寬度和高度。鼓階通道輪廓確定后,暫時忽略其徑向定位,沿鼓階通道中心線放置輪廓。基于曲線起始點到每個點的路徑段的總長度,確定沿著中心線的離散點,將這些點用作每個截面輪廓的坐標(biāo)中心。確定穿過每個輪廓的中心線的x-y平面投影的方向,并利用式(5)順時針旋轉(zhuǎn)π/2來確定每個輪廓相對于模型坐標(biāo)系x軸的角度α,使每個輪廓垂直于中心線的x-y平面投影,如圖6所示。

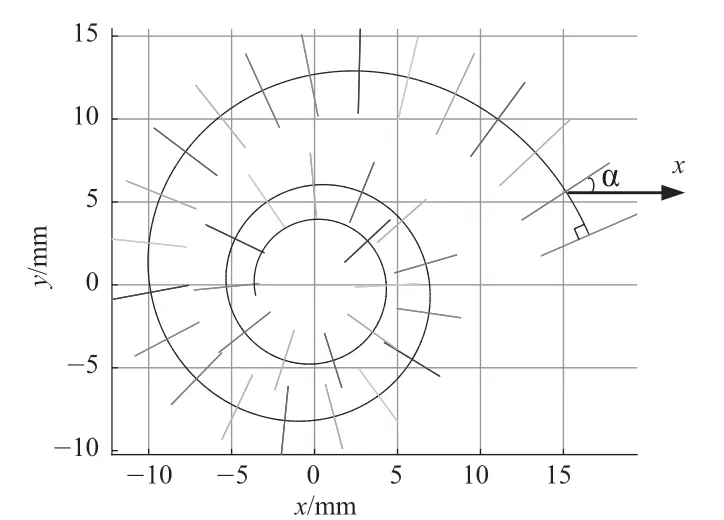
圖6 鼓階通道輪廓定位圖Fig.6 Profile location of scala tympani channel
α是輪廓投影在x-y平面上相對于x軸的角度,arctan2是四象限反正切函數(shù),△y和△x是輪廓中心坐標(biāo)與中心線上的連續(xù)離散點之間的差。
鼓階通道輪廓設(shè)計主要分為兩步。首先,根據(jù)式(4)及圖5繪制輪廓點形成實體輪廓。然后,利用式(5)確定輪廓在三維空間內(nèi)的位置和方向使得鼓階中心曲線穿過其中心,通過式(6)計算輪廓上每一點的坐標(biāo),將鼓階通道輪廓從二維平面轉(zhuǎn)換至三維空間。
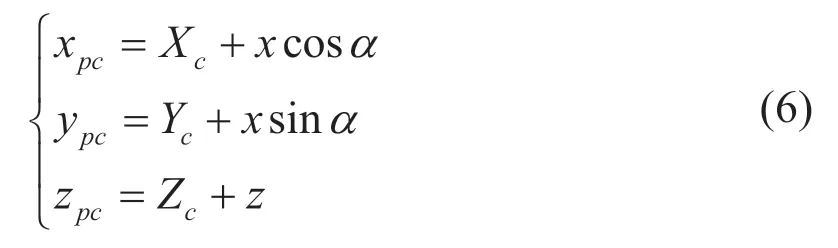
式中,xpc、ypc、zpc為輪廓上每一點的坐標(biāo),Xc、Yc、Zc為輪廓中心點坐標(biāo);x和z由式(4)計算確定。
2.3 鼓階模型生成
將鼓階模型中心線信息及輪廓信息導(dǎo)入Matlab,設(shè)定擴展系數(shù),編寫程序生成鼓階三維模型并輸出模型相關(guān)參數(shù)及數(shù)據(jù)坐標(biāo)信息,鼓階三維數(shù)學(xué)模型如圖7所示。
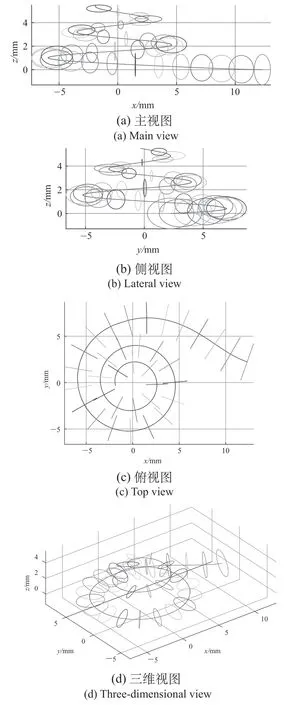
圖7 鼓階三維數(shù)學(xué)模型Fig.7 Three-dimensional mathematical model of scala tympani
Matlab輸出的鼓階模型中心曲線長度為68.01 mm,模型擴展比例為2:1,由此可得耳蝸鼓階模型長度為34.005 mm。盡管與參考文獻中給出的鼓階長度存在偏差,但是該模型是由計算機輔助幾何方法所得,且參考文獻所提供的僅為參考數(shù)據(jù)。由此可知該鼓階模型長度基本符合真實耳蝸幾何特征。
將每個鼓階通道輪廓坐標(biāo)及鼓階中心線坐標(biāo)以樣條曲線方式導(dǎo)入SolidWorks中,然后由鼓階截面輪廓沿鼓階中心線邊界切除創(chuàng)建鼓階通道,2:1比例的虛擬鼓階模型如圖8所示。鼓階模型上平面有一大小為M1的圓柱孔與蝸頂相通,在植入實驗前,可以由此注入潤滑液以模擬鼓階內(nèi)部液體環(huán)境。
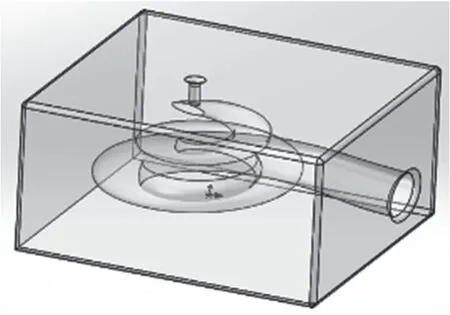
圖8 虛擬鼓階模型Fig.8 Virtual model of scala tympani
3 鼓階模型制備與實驗
3.1 鼓階模型制備
將在SolidWorks中創(chuàng)建完成的鼓階模型存儲為.stl格式文件并輸出至3D打印機進行打印。采用Formlabs公司的Form2 SLA 3D打印機和全透明型光敏樹脂對耳蝸鼓階模型進行制備,全透明型光敏樹脂便于在電極植入過程中實時觀察電極位置并記錄植入過程。
預(yù)彎電極植入實驗采用2:1比例的耳蝸鼓階模型,如圖9所示為2:1比例的耳蝸鼓階模型三視圖,模型中長方體的尺寸為19.97 mm×19.67 mm×9.33 mm。
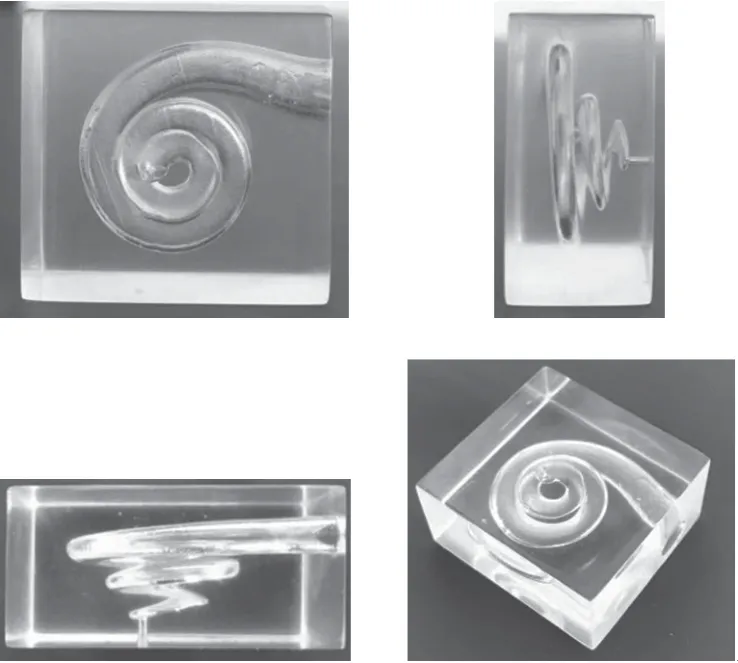
圖9 2:1比例鼓階模型三視圖Fig.9 Three views of 2:1 scala tympani model
3.2 預(yù)彎電極植入實驗
基于制備所得耳蝸鼓階模型,設(shè)計人工耳蝸預(yù)彎電極機器人植入力檢測系統(tǒng)。實驗平臺由5部分組成,分別為計算機、機器人系統(tǒng)、夾持器、視覺系統(tǒng)和預(yù)彎電極植入力檢測平臺。機器人系統(tǒng)用于夾持電極與電極植入,視覺系統(tǒng)主要用來記錄預(yù)彎電極植入過程。預(yù)彎電極植入力檢測平臺測量電極植入過程中垂直方向的植入力,傳感器將采集到的信息發(fā)送至PC機進行存儲分析。
基于制備的2:1比例鼓階模型和人工耳蝸預(yù)彎電極植入力檢測實驗平臺,進行機器人和手動植入力檢測實驗,如圖10所示為預(yù)彎電極植入過程中的6個時刻。
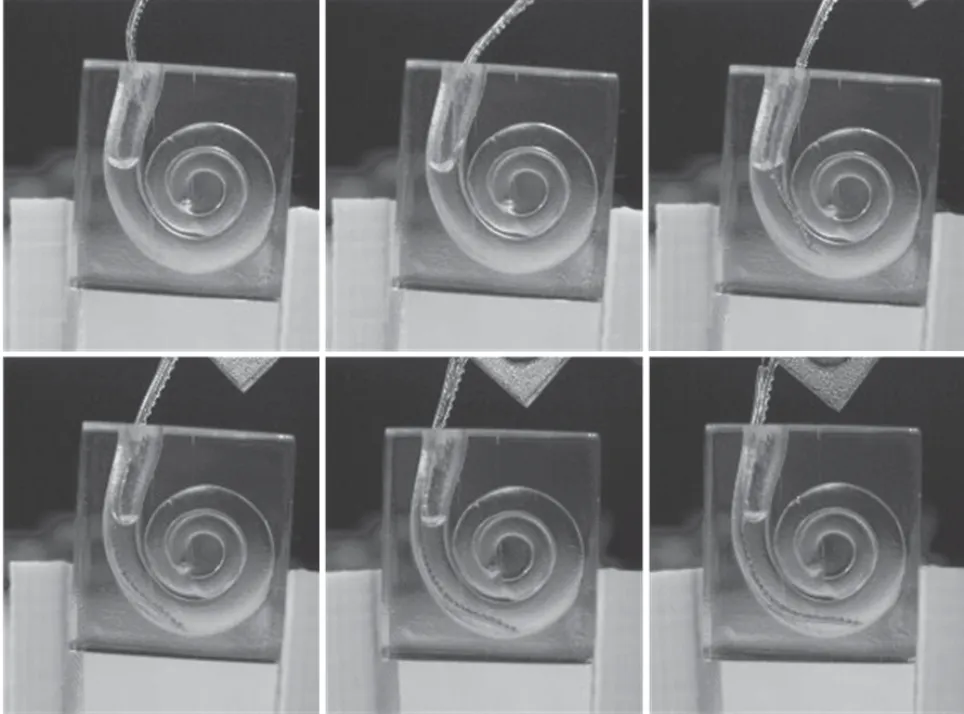
圖10 電極植入過程Fig.10 Implantation process of the electrode
共進行8組預(yù)彎電極植入力檢測實驗,預(yù)彎電極植入力檢測結(jié)果如圖11所示。結(jié)果表明,使用該模型進行植入實驗,機器人植入力最大值遠小于手動植入力。由此可知,通過機器人進行人工耳蝸植入手術(shù)可以明顯降低電極植入力,對于減少對患者殘余聽力損傷具有重要意義。此外,結(jié)合圖11中的植入力變化曲線可知,機器人在植入電極的過程中植入力變化曲線波動幅度較小,而手動植入過程中可能會出現(xiàn)植入力波動較大的情況,機器人植入相較于手動植入具有更高的穩(wěn)定性與可靠性。
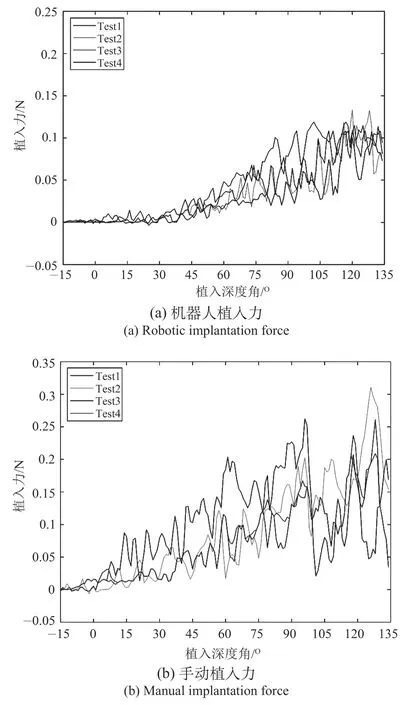
圖11 植入力檢測結(jié)果圖Fig.11 The result of the implantation force testing
4 結(jié)論
可擴展耳蝸鼓階模型設(shè)計方法是基于耳蝸臨床解剖學(xué)數(shù)據(jù)和耳蝸數(shù)學(xué)模型提出的,能夠較為準(zhǔn)確地反應(yīng)耳蝸真實結(jié)構(gòu),具有一定的準(zhǔn)確性。該鼓階模型能夠以不同比例進行擴展,以滿足不同研究和實驗需求,該方法不會破壞耳蝸結(jié)構(gòu),且可以通過常用工程軟件和常用材料進行復(fù)制,模型易于制備、成本較低,并且能夠重復(fù)用于電極植入實驗,具有一定的經(jīng)濟價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
