基于3D打印技術(shù)的一種仿生機(jī)械狗的設(shè)計(jì)與制作
2021-12-04 08:20:50青曉雨貟歡樂
探索科學(xué)(學(xué)術(shù)版) 2021年12期
關(guān)鍵詞:設(shè)計(jì)
肖 穎 青曉雨 貟歡樂
航天工程大學(xué)士官學(xué)校 北京 102200
目前,大多數(shù)陸地上的交通工具進(jìn)行運(yùn)動(dòng)的方式主要是電機(jī)驅(qū)動(dòng)車輪或履帶,這種方式的缺點(diǎn)是對(duì)路面狀況的依賴度較高,在崎嶇的路上難以通行。但是擁有腿部的動(dòng)物卻可以十分輕松的通過這些路段,因?yàn)樗鼈兊耐炔康倪\(yùn)動(dòng)方式具有完全不同的原理。動(dòng)物的自如行走,給科學(xué)家們帶來啟示,開始研究仿生學(xué),從足式機(jī)器人入手,來模仿動(dòng)物的行走方式。
現(xiàn)有的足式步行機(jī)器人的腿部機(jī)構(gòu)分為單腿,雙腿,三腿,四腿,六腿,八腿甚至還有更多,其中偶數(shù)腿占這些中的絕大多數(shù),因?yàn)閺闹本€運(yùn)動(dòng)來看的話,偶數(shù)的腿部更容易控制并產(chǎn)生有效的步態(tài),而偶數(shù)腿中,四足機(jī)器人又比雙足機(jī)器人具有更好地穩(wěn)定性和承載能力,同時(shí)在結(jié)構(gòu)和控制算法的復(fù)雜程度方面又優(yōu)于六足、八足機(jī)器人,綜合性能是最佳的。
本文設(shè)計(jì)了一種以四桿機(jī)構(gòu)為支撐,設(shè)計(jì)多連桿機(jī)械機(jī)構(gòu),通過改變腿部設(shè)計(jì)參數(shù)確定腿部桿件運(yùn)動(dòng)軌跡,要求運(yùn)動(dòng)須平穩(wěn),有持續(xù)行走能力,不出現(xiàn)故障,將設(shè)計(jì)好的機(jī)構(gòu)利用SolidWorks軟件對(duì)多桿機(jī)構(gòu)進(jìn)行三維建模,仿真驗(yàn)證其運(yùn)動(dòng)有效性。確定尺寸參數(shù)、繪制圖紙,通過3D打印技術(shù)加工完成各個(gè)零件,組裝完成仿生機(jī)械狗。最后模擬各種復(fù)雜地形驗(yàn)證其有效性。
一、仿步態(tài)機(jī)構(gòu)的設(shè)計(jì)
(一)方案的選擇
經(jīng)過多方論證和調(diào)研,決定采用四桿仿生機(jī)構(gòu)。四足動(dòng)物的腿部運(yùn)動(dòng)順序?yàn)?開始起步時(shí)如果是右前足先向前邁步,對(duì)角線的左后足就會(huì)跟著向前走,接著是左前足向前走,然后對(duì)角線的右后足跟向向前,接著繼續(xù)循環(huán),完成行走的整個(gè)過程。設(shè)計(jì)時(shí)要求狗在行走時(shí)晃動(dòng)不能過大,高度方向不能超過身體高度的8%,寬度方向變化量不能超過總寬度的5%。狗腿落地的時(shí)候機(jī)構(gòu)能接近自然狀態(tài),以便于提高狗的承載能力。狗邁步的步距最好在狗身長的1/4左右,跨步高度要高,以提高越障能力。狗蹄在運(yùn)動(dòng)時(shí)形成的封閉曲線,要求在下面的那一段最好是直線,或接近直線。
(二)四桿仿步態(tài)機(jī)構(gòu)設(shè)計(jì)
在設(shè)計(jì)仿生機(jī)構(gòu)時(shí),其足部軌跡曲線是首要考慮的重要條件,因?yàn)樗鼤?huì)直接影響到仿生機(jī)構(gòu)對(duì)地形的適應(yīng)能力和行進(jìn)時(shí)的穩(wěn)定性。因此,要首先確定理想的足部軌跡特性。
理想足部軌跡曲線的要求如下:
1)由足部產(chǎn)生的軌跡曲線必須為一封閉且不相交叉的曲線,以避免產(chǎn)生無效的軌跡曲線。
2)足部軌跡曲線中的支撐段曲線應(yīng)為直線段,以避免機(jī)構(gòu)重心的上下起伏。
3)足部軌跡曲線中的跨越段曲線的垂直高度越高越好,以利于提高機(jī)構(gòu)跨越障礙的能力。
4)根據(jù)真實(shí)狗的步態(tài)動(dòng)作,四桿機(jī)構(gòu)機(jī)械狗前腿的足部軌跡線與后腿的足部軌跡線應(yīng)是不相同的;前腿的抬腿動(dòng)作要較高些。
狗在換腿時(shí),其后腿與前腿的足部會(huì)相當(dāng)接近,為防止干涉,要求四桿仿生機(jī)構(gòu)的前、后腿機(jī)構(gòu)的足部軌跡曲線的右極點(diǎn)和左極點(diǎn)必須要接近步行機(jī)構(gòu)的中心點(diǎn)位置,為了模擬真狗的運(yùn)動(dòng)狀態(tài),根據(jù)膝關(guān)節(jié)鎖定原理限制四桿仿生機(jī)構(gòu)的前、后腿機(jī)構(gòu)的小腿桿件相對(duì)于大腿桿件的運(yùn)動(dòng)范圍,一般最大不可超過180°,小腿桿件相對(duì)于大腿桿件的運(yùn)動(dòng)范圍限制在89°—179°。前后腿機(jī)構(gòu)的性能要求如下表所示。

表2.1 前腿機(jī)構(gòu)的性能要求
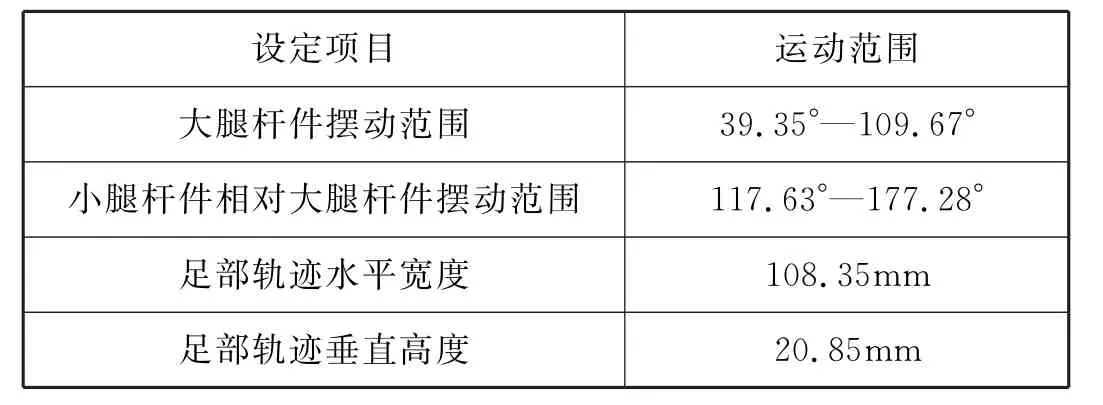
表2.2 后腿機(jī)構(gòu)的性能要求
四桿仿步態(tài)機(jī)構(gòu)能模擬真實(shí)狗運(yùn)動(dòng)時(shí)的步態(tài)動(dòng)作,設(shè)計(jì)時(shí)要限制四桿仿生機(jī)構(gòu)的前、后腿機(jī)構(gòu)的運(yùn)動(dòng)范圍。因?yàn)檫\(yùn)動(dòng)范圍過大,會(huì)使抬腿動(dòng)作過于夸張不符合真狗的動(dòng)作;反之,若運(yùn)動(dòng)范圍過小,會(huì)使步行機(jī)構(gòu)沒有真狗的抬腿動(dòng)作,而無法跨越障礙。因此,首先確定大腿與機(jī)架之間的運(yùn)動(dòng)范圍一般為45°—135°
在設(shè)計(jì)具有急回運(yùn)動(dòng)特性的四桿機(jī)構(gòu)時(shí),通常按實(shí)際需要先給定行程速度變化系數(shù)K的數(shù)值,然后根據(jù)機(jī)構(gòu)在極限位置的幾何關(guān)系,結(jié)合有關(guān)輔助條件來確定機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖的尺寸參數(shù)。確定各桿件的長度尺寸如下表所示:

表2.3 四桿仿步態(tài)機(jī)構(gòu)尺寸參數(shù)
(三)傳動(dòng)機(jī)構(gòu)設(shè)計(jì)
四桿仿生機(jī)構(gòu)驅(qū)動(dòng)采用一個(gè)直流電機(jī)驅(qū)動(dòng),通過二級(jí)減速器傳遞動(dòng)力,帶動(dòng)四個(gè)曲柄旋轉(zhuǎn),從而確定四只腿按嚴(yán)格的相位關(guān)系運(yùn)轉(zhuǎn),控制每條腿的運(yùn)動(dòng)順序及運(yùn)動(dòng)軌跡。此設(shè)計(jì)結(jié)構(gòu)簡(jiǎn)單,便于實(shí)現(xiàn)四只腿間動(dòng)作的協(xié)調(diào)。

圖2.2 傳動(dòng)機(jī)構(gòu)內(nèi)部布局圖
通過數(shù)次計(jì)算,最終得出各個(gè)齒輪構(gòu)件的詳細(xì)參數(shù),如表2.4:

表2.4 傳動(dòng)機(jī)構(gòu)零件的尺寸參數(shù)
電動(dòng)機(jī)的輸出轉(zhuǎn)速為300-800r/min之間,經(jīng)過齒輪輪系組成2級(jí)變速箱,對(duì)傳輸速度進(jìn)行減速處理,使傳動(dòng)軸的轉(zhuǎn)速為20—50r/min之間,齒輪的傳動(dòng)比為16:1,使用3組斜齒輪改變動(dòng)力傳輸方向,齒輪齒數(shù)分別為10、20、40。最終采用轉(zhuǎn)速較慢但轉(zhuǎn)矩較大的電動(dòng)機(jī),確定使用電動(dòng)機(jī)的輸出轉(zhuǎn)速為=560r/min的電動(dòng)機(jī)。如下圖所示:

圖2.3 所用電機(jī)實(shí)物圖
二、3D打印完成項(xiàng)目制作
(一)3D打印技術(shù)
3D打印,又稱增材制造,是快速成型技術(shù)的一種,其原理是先通過計(jì)算機(jī)建模或掃描原型,得到數(shù)字化模型,然后將三維模型分解成多層的二維截面數(shù)據(jù),再通過軟件與數(shù)控系統(tǒng)將材料進(jìn)行逐層打印,最終形成三維實(shí)體。其中FDM是將絲狀的熱塑性材料加熱熔融,在計(jì)算機(jī)的控制下,根據(jù)三維模型信息,將材料選擇性地涂敷在工作臺(tái)上,快速冷卻后形成一層截面;一層成型完成后,機(jī)器工作臺(tái)下降一個(gè)高度再涂覆下一層,直至形成整個(gè)三維造型。FDM工藝能兼容多種類型的材料且更換方便,維護(hù)成本低,可以快速成型厚度較小的實(shí)體。
FDM使用的熱塑性高分子材料[5–6]主要有丙烯腈 –丁二烯 – 苯乙烯塑料(ABS)、聚乳酸(PLA)、聚碳酸脂(PC)、尼龍(PA)、聚醚醚酮(PEEK)等。其中ABS(Acrylonitrile Butadiene Styrene,ABS)是丙烯腈-丁二烯-苯乙烯共聚物,是FDM第二大應(yīng)用量的耗材,是一種具有較高的強(qiáng)韌結(jié)合性、易于加工成型的熱塑型高分子材料結(jié)構(gòu),在模型設(shè)計(jì)領(lǐng)域得到廣泛的應(yīng)用。本文采用的是ABS樹脂材料打印。
(二)模型設(shè)計(jì)
設(shè)計(jì)初期,腿部桿件采用圓柱形設(shè)計(jì),利用3D打印技術(shù)打印腿部桿件。在經(jīng)過幾次試驗(yàn)后,發(fā)現(xiàn)圓柱形腿部桿件在腿部運(yùn)動(dòng)中,靈活度較低,不能滿足整個(gè)腿部 機(jī)構(gòu)的運(yùn)動(dòng)軌跡,達(dá)不到理想的效果。隨后,我們針對(duì)這一問題,經(jīng)過深入細(xì)致的研究,最終決定,將腿部桿件改為扁平狀,能夠有效克服因靈活度較低帶來的一系列問題,保證了整個(gè)腿部機(jī)構(gòu)的靈活性。
設(shè)計(jì)過程中,由于足部底面與地面的接觸面積有限,造成了在行走過程中,整個(gè)機(jī)構(gòu)出現(xiàn)晃動(dòng)現(xiàn)象,無法保證行走過程的整個(gè)機(jī)構(gòu)的穩(wěn)定性。決定對(duì)桿件厚度進(jìn)行加固,克服了因桿件自身重量較輕存在的問題。然后,從人體關(guān)節(jié)的靈活度出發(fā),決定給各個(gè)桿件加上類似于人類鞋子的足部零件,改進(jìn)后的足部就像人體關(guān)節(jié)一樣,可進(jìn)行360度旋轉(zhuǎn),有效的增加了足部與地面的接觸面積,提高了足部與地面的摩擦力,保證了腿部行走機(jī)構(gòu)的穩(wěn)定性和運(yùn)動(dòng)軌跡。

圖3.1 腿部桿件與足部零件設(shè)計(jì)圖紙
三、結(jié)束語
本設(shè)計(jì)基于3D打印技術(shù)完成了四足仿生機(jī)器人樣機(jī)中腿部機(jī)構(gòu)和身體的制作,可實(shí)現(xiàn)腿部機(jī)構(gòu)的穩(wěn)定運(yùn)動(dòng),能夠滿足在不規(guī)則路面、沼澤、沙地、跨越障礙物等崎嶇復(fù)雜的路面上穩(wěn)定行走,具有較好的穩(wěn)定性和承載能力。主要是針對(duì)特殊環(huán)境和特殊任務(wù),比如,在執(zhí)行裝備搬運(yùn)、故障排除、搶險(xiǎn)救災(zāi)、情況偵查、翻越障礙等任務(wù)。

圖3.2 3D打印的內(nèi)部零件與外殼
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
