基于鳶尾花機構的分類打包垃圾桶研究
2021-12-01 08:58:26徐文源崔志遠李治钘
智能城市 2021年20期
徐文源 崔志遠 吳 仟 李治钘 李 躍
(河南科技大學機電工程學院,河南洛陽 471003)
隨著我國社會經濟的高速發展、人們生活水平的提高,垃圾產量越來越多,綠色生活成為重要的發展方向之一。垃圾分類是對垃圾收集處置傳統方式的改革,是對垃圾進行有效處置的一種科學管理方法。人們面對日益增長的垃圾產量和環境惡化的局面,如何通過垃圾分類管理實現垃圾資源最大化利用、減少垃圾處置量、改善生存環境質量,是當前全球共同關注的問題之一。設計一種方便快捷、省時省力、有效分類垃圾、封閉垃圾異味的智能垃圾桶十分必要。
1 分類打包垃圾桶總體結構設計
裝置總體包含兩個功能,即語音識別垃圾分類、機械結構輔助打包。語音識別垃圾分類時,用戶對垃圾箱說某個垃圾的名字,樹莓派將該信息傳給百度云,百度云進行語音處理返回字符串上傳微信機器人,返回對話字符串,百度云語音處理轉化為語音轉給樹莓派,再傳達給用戶該垃圾屬于哪種垃圾,發出打開該類垃圾箱指令,以同樣的方式串口通信完成分類過程。打包功能啟動時,超聲波傳感器識別到即將滿箱時,鳶尾花收攏機構在步進電機帶動齒輪旋轉下收攏開口的垃圾袋,形成垃圾袋束,舵機帶動熱封機構對收攏的垃圾袋進行熱塑打包,打包后多連桿結構同時帶動垃圾桶前門板、底板圍繞旋轉軸中心向前旋轉,連桿機構同時使壓緊垃圾袋的壓環上升,達到多機構聯動的效果,最后垃圾出箱,結束分類打包過程。
整體結構如圖1所示。
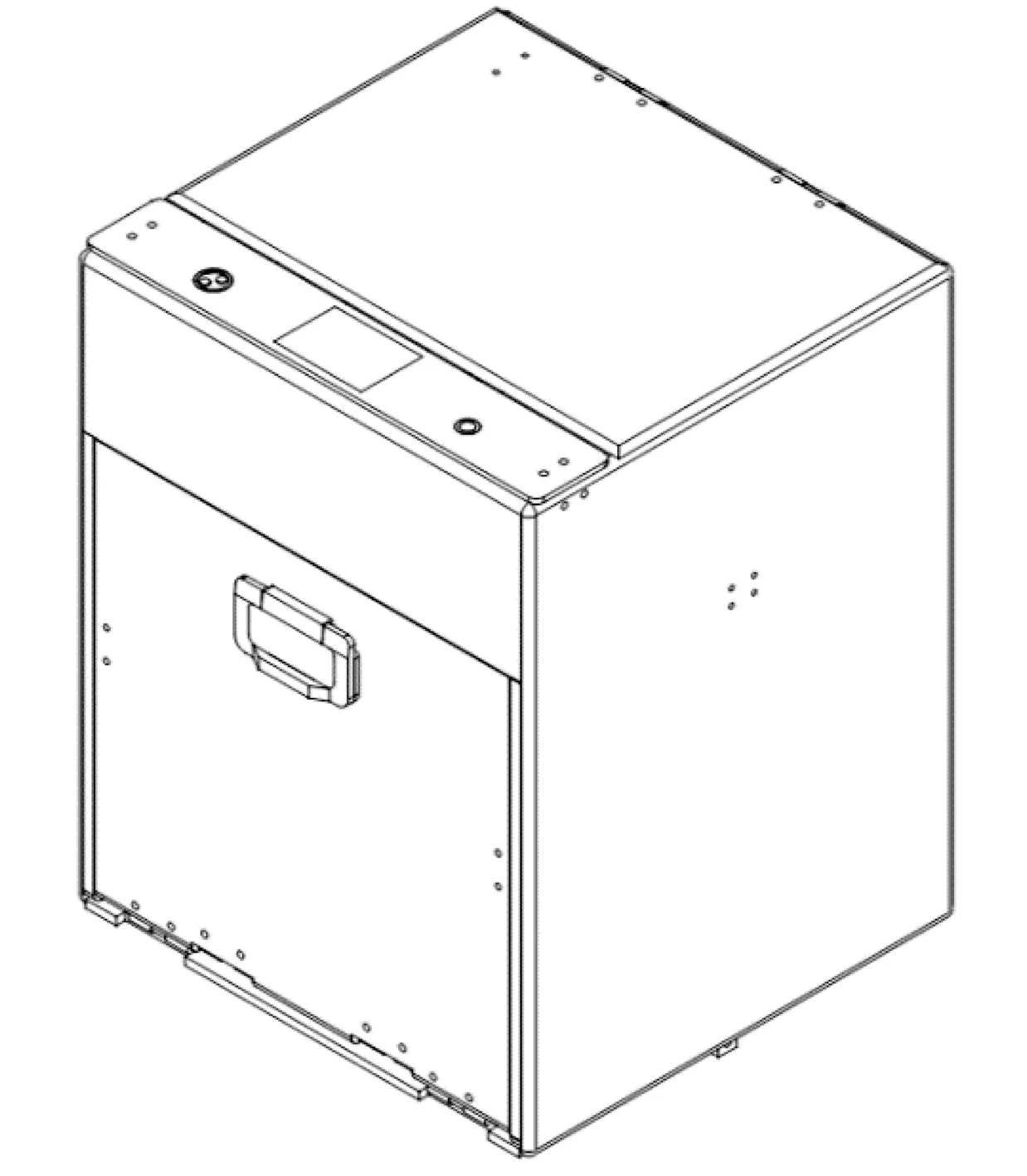
圖1 整體結構
1.1 鳶尾花機構
鳶尾花機構由帶有不完全齒輪和滑槽的鋼板、帶有圓孔的鋼板、14片葉片、墊高用的木板組成,通過葉片連接在一起,在步進電機驅動下可以實現旋轉收攏和展開,展開狀態下套用垃圾袋。打包垃圾時需要收攏垃圾袋,裝置中加有鳶尾花機構。
鳶尾花機構如圖2所示。
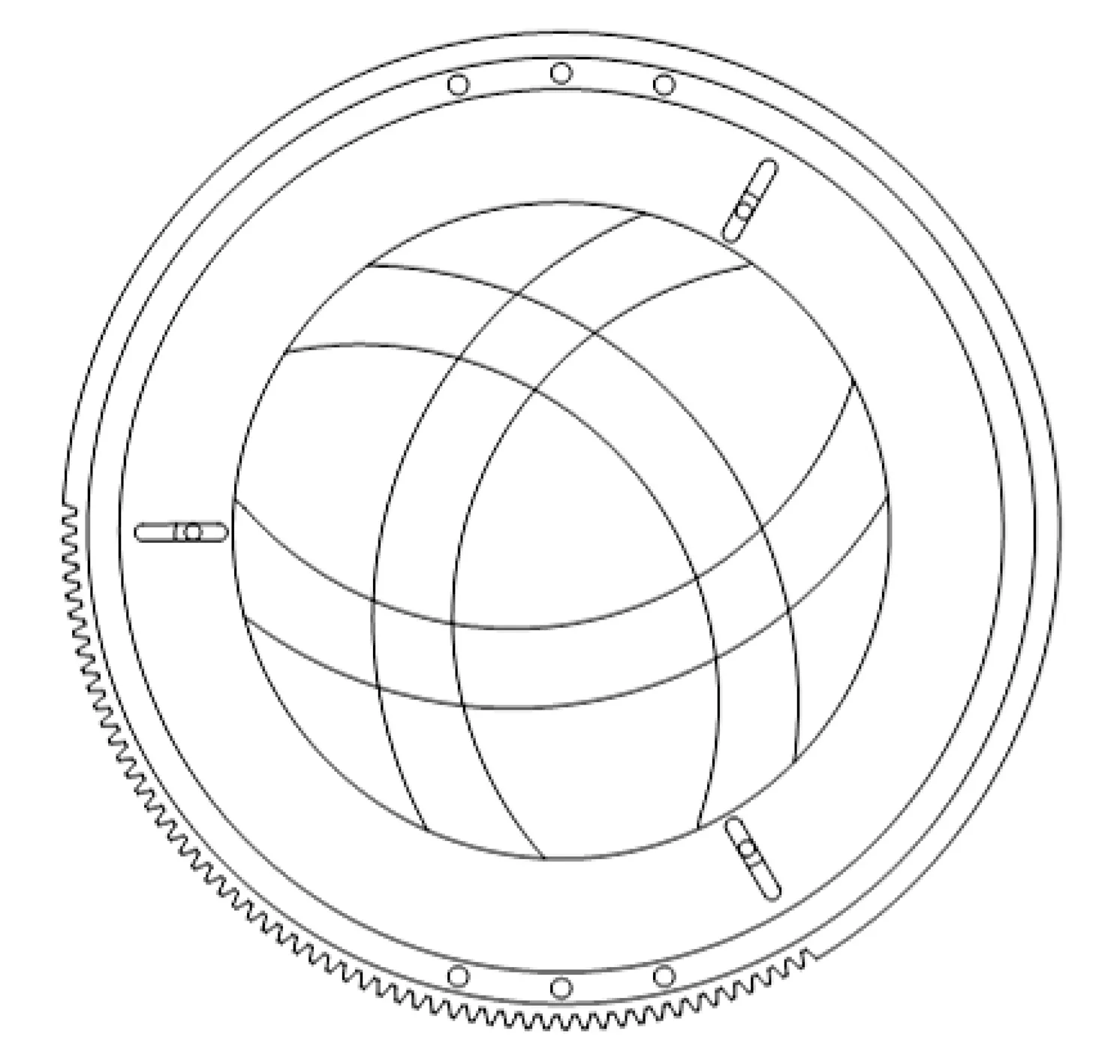
圖2 鳶尾花機構
超聲波傳感器檢測到垃圾滿或接收用戶打包指令時,鳶尾花在步進電機驅動下旋轉,葉片朝中間收攏使垃圾袋聚攏,形成袋束。鋼板葉片直接接觸摩擦力過大,故在兩鋼板中間加入木板墊高,防止交叉阻礙運轉。
1.2 熱塑機構
熱塑機構由1個步進電機、2個齒輪轉桿及熱封片組成,熱封片固定在齒輪轉桿末端,轉桿固定在步進電機上。鳶尾花機構把垃圾袋收攏為垃圾袋束時,由步進電機驅動帶動齒輪轉桿向中間合攏,由程序驅動熱封片加熱到設定溫度對垃圾袋進行封口。垃圾袋打包完成后,程序繼續執行下一個命令,熱塑機構兩齒輪轉桿向兩邊張開。
熱塑機構如圖3所示。
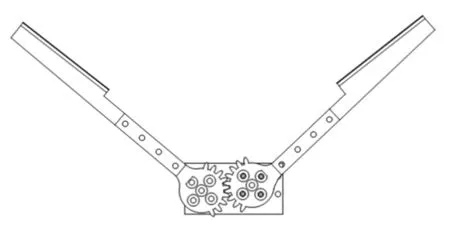
圖3 熱塑機構
1.3 壓環連桿機構
由前門板、連桿、底板、壓環推桿通過鉚接裝配組成。使用過程中,連桿連接前門板和底板,先拉動前門板,固定在前門板上的連桿帶動底板向上運動,底板上的滑塊在光桿上滑動,滑塊上的鉚釘順勢將壓環推桿向上推,帶動壓環上升,上升到一定距離后,垃圾袋在重力作用下脫離壓環,沿底板滑出垃圾箱。
連桿機構如圖4所示。
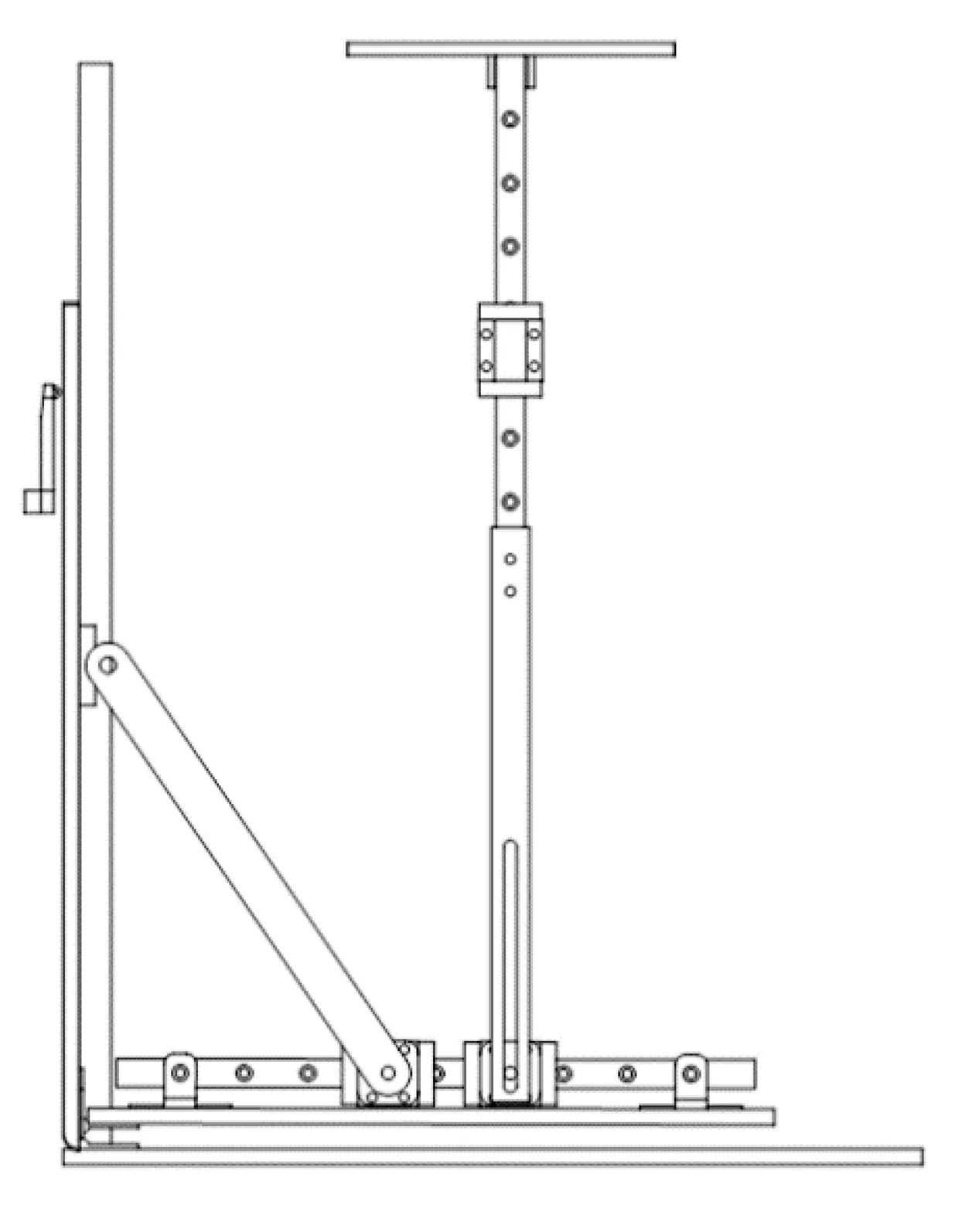
圖4 連桿機構
2 智能控制系統設計
智能控制系統采用樹莓派3B+和Arduino MEGA2560并行控制,Arduino實時監測開關按鈕開啟關閉狀態,紅外感應模塊數值,樹莓派串口數據。樹莓派保持監聽狀態,隨時接收外部語音數據,可以通過“小美小美”行語音交互。用戶發出的語音數據上傳百度AI平臺進行處理,云端對話機器人返回對話數據后,運行在樹莓派上的語音插件會檢測關鍵字,實現垃圾識別、語音控制。樹莓派將數據通過串口發送給Arduino,Arduino檢測到串口數據后執行操作,智能控制系統提供多種交互形式,可以通過語音控制垃圾桶的開啟打包,內嵌紅外感應模塊可以感知人體,可采用揮手或抬膝控制垃圾桶開啟,提供一鍵打包按鈕和垃圾袋安放完畢標志按鈕。Arduino會記錄最近一次濕垃圾桶打開記錄,若時間過長會在下一次投放垃圾時提醒及時取走垃圾。
2.1 控制中心
樹莓派3B+具有64位四核1.4 GHz處理器、雙頻2.4 GHz和5 GHz無線WiFi、藍牙4.2/BLE、1 GB內存、千兆以太網、4個USB2.0端口、40引腳GPIO接口。Arduino MEGA2560有54路數字輸入/輸出口、16路模擬輸入、4路UART接口、1個16 MHz晶體振蕩器、1個USB口、1個電源插座、1個ICSP header以及1個復位按鈕。供電部分采用5 V2.5 A直流供電,Arduino MEGA2560接樹莓派USB口通過USB供電。
2.2 傳感器模塊
控制系統的傳感器模塊有ZL-13紅外感應模塊,ZL-13感應距離為15~30 cm,自動感應。垃圾箱前面板有2個按鈕,Arduino會檢測按鈕狀態并相應行動,傳感器供電從Arduino MEGA2560直接引出。
2.3 機械驅動模塊
機械驅動模塊分為打包驅動以及頂板驅動,打包驅動由1個42步進電機驅動鳶尾花旋轉、1個驅動夾子捏合組成。步進電機驅動器為DRV8825,具有最高32細分、過熱、過流、欠壓保護、輸入電壓防反接保護等功能。
平板驅動采用Mg 995舵機與多連桿協同驅動,Mg 995舵機五級精度金屬齒輪組,6 V11 kg扭力,速度0.18 s/60°,堵轉工作電流1 450 mA,舵機聯動連桿驅動頂蓋開合。整機電源采用7.4 V、5 300 mAh大容量18650電池組供電,熱封部分由7.4 V、2 800 mAh鋰電池組單獨供電,樹莓派采用樹莓派專用電源供電,以保持樹莓派穩定運行。
3 裝置組成
裝置由取放機構、打包機構、智能控制模塊組成。垃圾處理裝置除鳶尾花部件部分由金屬制成,其余由木板和3D打印件制作,整機重量小、綠色環保。取放機構由壓環、頂桿、滑塊、連桿、前門板、底板、側板組成。前門板及底板軸由側板支承,前門板與底板通過連桿連接,直線導軌安裝在底板上,滑塊沿直線導軌移動,滑塊通過銷釘與頂桿底端滑槽相連,頂桿在側板固定槽內移動,頂桿頂端接壓環。打包機構由鳶尾花部件和熱封機組成,鳶尾花部件主要由葉片、齒輪盤、板支撐柱、固定板、鳶尾花上蓋組成,熱封機由夾持臂、步進電機等組成,熱封夾子端子有加熱電阻絲,可在2~3 s內熱封垃圾袋。智能控制模塊由傳感器、控制中心、機械驅動模塊組成,各部分協同運作完成分類、取放、語音交互等功能。
4 結語
國家經濟發展迅速,總體消費水平提高,垃圾產量日益增多,垃圾分類愈發重要。為了減少處理垃圾的裝備,降低成本,需要在家庭環節就分類垃圾。打造新一類智能垃圾箱,結合多項功能,實現在不同區域、形式以及家庭的應用,應用前景廣闊。
