基于嵌套?偽預(yù)估器反饋的時滯控制系統(tǒng)輸入時滯補償
2021-12-01 08:25:50劉青松
自動化學(xué)報 2021年10期
劉青松
近幾十年以來,時滯控制系統(tǒng)的分析與設(shè)計一直是一個比較活躍的研究課題,涌現(xiàn)了大量的研究成果[1?6].鎮(zhèn)定和穩(wěn)定性是時滯控制系統(tǒng)的基本設(shè)計問題,得到了深入的研究[7?9].鎮(zhèn)定問題近年來得到了眾多學(xué)者的重視.例如,文獻[10]利用序貫預(yù)估器方法研究具有時變時滯的控制系統(tǒng)的鎮(zhèn)定問題.針對具有輸入時滯的關(guān)聯(lián)系統(tǒng),文獻[11]利用基于分布式預(yù)估器的控制器解決了其鎮(zhèn)定問題.文獻[12]和文獻[13]分別利用時滯相關(guān)脈沖控制方法和連續(xù)預(yù)估器方法研究(具有狀態(tài)、輸入和輸出時滯)的控制系統(tǒng)的鎮(zhèn)定問題.近年以來,針對時滯系統(tǒng)的穩(wěn)定性涌現(xiàn)大量的成果.例如,文獻[14?18]研究了時滯脈沖系統(tǒng)的(指數(shù))穩(wěn)定性.基于預(yù)估器反饋的方法,文獻[19?20]研究了線性時滯控制系統(tǒng)的(魯棒)穩(wěn)定性.通過加權(quán)不等式的方法,文獻[21]研究了具有時變時滯離散系統(tǒng)的有限穩(wěn)定性.文獻[22]給出了線性中立型時滯系統(tǒng)指數(shù)穩(wěn)定性的必要條件.
預(yù)估器反饋方法已經(jīng)廣泛應(yīng)用于時滯控制系統(tǒng)的分析與設(shè)計中,學(xué)者們對其進行了深入研究.例如,文獻[23]首次提出Smith 預(yù)估器方法對輸入時滯進行補償,使得閉環(huán)系統(tǒng)變成無時滯系統(tǒng).文獻[24]采用預(yù)估器反饋方法考慮了具有多輸入時滯的非線性系統(tǒng)的鎮(zhèn)定問題.針對具有隨機網(wǎng)絡(luò)時滯的網(wǎng)絡(luò)化控制系統(tǒng),文獻[25]利用網(wǎng)絡(luò)預(yù)測控制方法分析其隨機穩(wěn)定性問題.從頻域的角度,文獻[26]研究了時滯控制系統(tǒng)的設(shè)計問題,提出了有限譜配置方法.最近,文獻[27]提出一種稱為偽預(yù)估器反饋的新方法,研究僅含輸入時滯的線性系統(tǒng)鎮(zhèn)定問題.不同于傳統(tǒng)的預(yù)估器反饋利用開環(huán)系統(tǒng)預(yù)測系統(tǒng)未來的狀態(tài),偽預(yù)估器反饋則是利用閉環(huán)系統(tǒng)預(yù)測系統(tǒng)未來的狀態(tài),從而所得到的控制器是無記憶的或者是有限維的.后來,偽預(yù)估器反饋方法[27]推廣到了含有多個點時滯與分布輸入時滯的線性系統(tǒng)[28]和輸入時滯與狀態(tài)時滯相同的線性系統(tǒng)[29].此外,文獻[30]還提出了另一種稱為截斷預(yù)估器反饋方法.
最近,針對同時具有輸入和狀態(tài)時滯的控制系統(tǒng),文獻[31]提出一種稱為嵌套預(yù)估器反饋的新方法,研究大輸入時滯補償問題.這種方法隨后推廣到了同時具有輸入和狀態(tài)時滯的中立型時滯系統(tǒng)[32].幾乎在同一時間,文獻[33]采用基于開環(huán)系統(tǒng)基礎(chǔ)解矩陣這一完全不同的方法,獨立地研究了此問題.文獻[33]中的方法也推廣到了中立型時滯系統(tǒng)[34].
受文獻[27]針對僅含輸入時滯的滯后型線性系統(tǒng)所提出的偽預(yù)估器反饋方法和嵌套預(yù)估器反饋方法[31]的啟發(fā).本文針對同時具有輸入和狀態(tài)時滯的線性系統(tǒng),通過建立嵌套?偽預(yù)估器反饋這一新方法,研究僅對其輸入時滯進行補償?shù)目刂葡到y(tǒng)設(shè)計問題.與傳統(tǒng)的模型化簡理論或有限譜配置理論不同,本文不是對輸入和狀態(tài)時滯都進行補償(即保證閉環(huán)系統(tǒng)具有有限個特征值),而是僅對其輸入時滯進行補償,使得補償后的系統(tǒng)僅含有狀態(tài)時滯,而且狀態(tài)時滯的大小不會增大.本文主要貢獻如下:1)提出了嵌套?偽預(yù)估器反饋這一新方法.2)針對同時具有輸入和狀態(tài)時滯的線性系統(tǒng),基于嵌套預(yù)估器反饋的控制器在實現(xiàn)時,需要增加輸入濾波器才能鎮(zhèn)定原時滯系統(tǒng)[31?32].本文提出的基于嵌套?偽預(yù)估器反饋的控制器無需增加濾波器便可鎮(zhèn)定原系統(tǒng).3)文獻[27]研究僅含輸入時滯的線性系統(tǒng)的輸入時滯補償問題,本文研究同時具有輸入和狀態(tài)時滯的線性系統(tǒng)的輸入時滯補償問題.此外,偽預(yù)估器反饋方法不能直接應(yīng)用于同時具有輸入和狀態(tài)時滯的線性系統(tǒng)中,因為基于偽預(yù)估器的控制器含有未來的狀態(tài)而不可實現(xiàn)(輸入時滯大于狀態(tài)時滯).
1 問題描述
考慮同時具有輸入和狀態(tài)時滯的中立型控制系統(tǒng)

其中,A∈Rn×n和B∈Rn×m都是定常矩陣,假設(shè)矩陣D∈Rn×n是舒爾穩(wěn)定的,r >0和h>0 分別表示狀態(tài)時滯和輸入時滯.不失一般性地假設(shè)

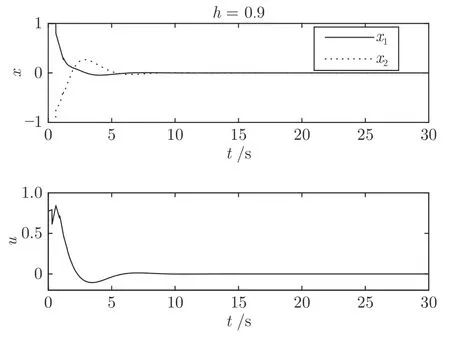
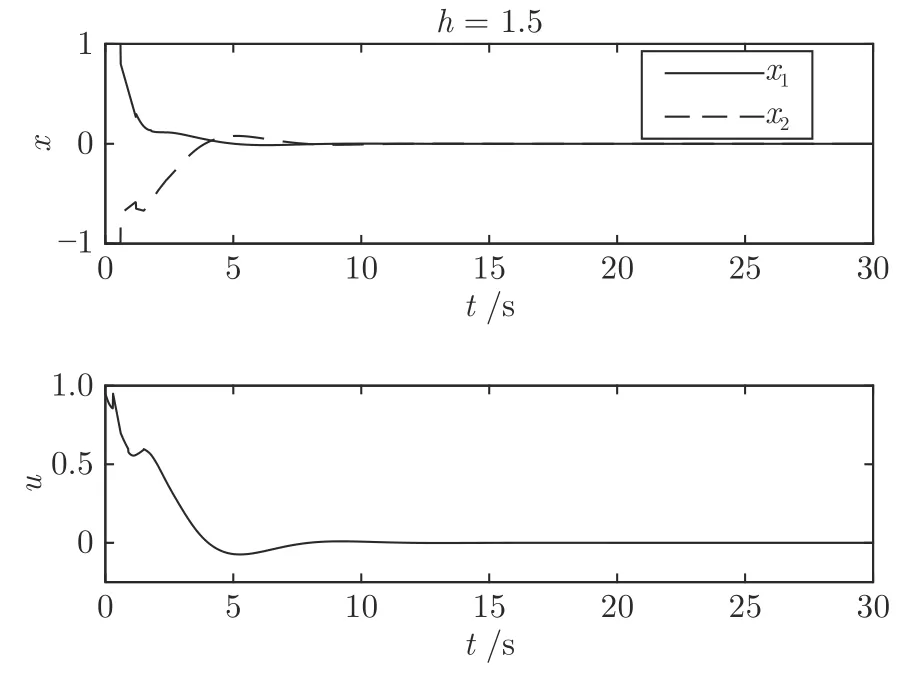
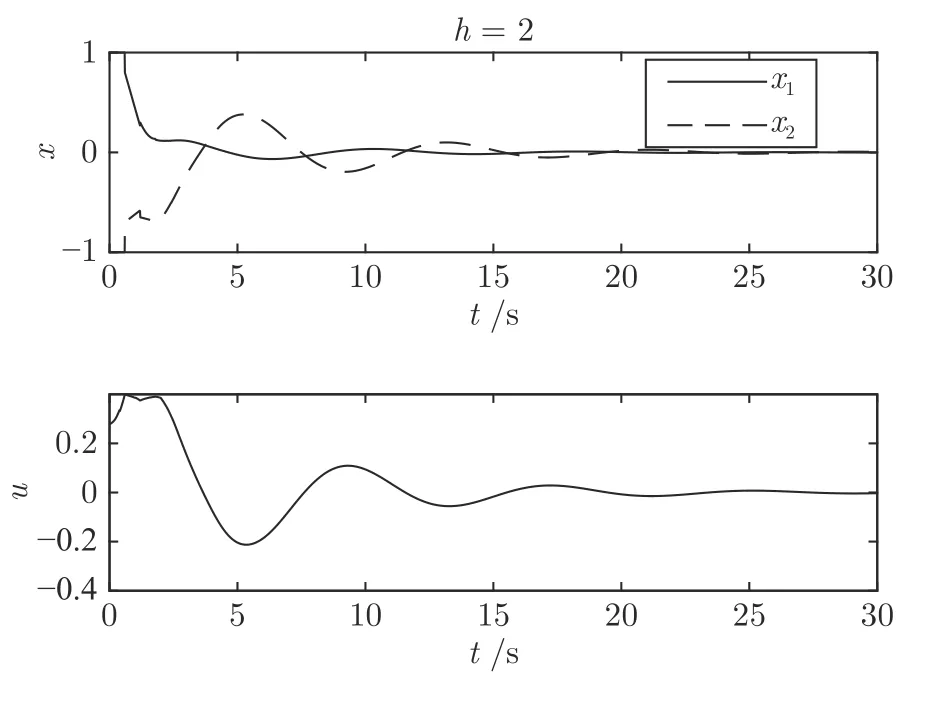
而當 0 問題 1.針對時滯控制系統(tǒng)(1),設(shè)計一個線性控制器 使得閉環(huán)系統(tǒng)是漸近穩(wěn)定的,其中,F 是線性泛函,xt(t)=x(t+θ),θ ∈[?r,0].類似文獻[31],給出下列假設(shè). 假設(shè) 1.存在反饋增益矩陣K∈Rm×n,使得下列時滯系統(tǒng)是漸近穩(wěn)定的 因此,問題1 等價于尋找一個適當?shù)姆椒ㄑa償輸入時滯.針對同時具有輸入和狀態(tài)時滯的線性系統(tǒng),模型化簡方法可以處理這樣的鎮(zhèn)定問題,然而,此方法需解一個由系數(shù)矩陣組成的非線性矩陣方程[35].最近,文獻[33]采用基于開環(huán)系統(tǒng)的基礎(chǔ)解矩陣方法研究了問題1,同時文獻[32]也研究了問題1.然而,所設(shè)計的控制器都含有下列積分項[32,34] 需通過數(shù)值積分進行實現(xiàn).而數(shù)值積分的缺點是無論數(shù)值積分多么精確,閉環(huán)系統(tǒng)可能都不穩(wěn)定[36].文獻[32,34]通過增加輸入濾波器解決了控制器的實現(xiàn)問題.本文將給出一個完全不同的解決方案,既解決了傳統(tǒng)預(yù)估器反饋控制器的實現(xiàn)問題,也克服了嵌套預(yù)估器在數(shù)值實現(xiàn)時閉環(huán)系統(tǒng)可能不穩(wěn)定問題(需增加輸入濾波器). 注意到,時滯系統(tǒng)(1)與控制器 組成的閉環(huán)系統(tǒng) 與式(2)的形式一樣,則由假設(shè)1 可知,閉環(huán)系統(tǒng)是漸近穩(wěn)定的.但是,由于控制器(5)含有未來的狀態(tài)x(t+h?r),h>r,需利用系統(tǒng)的模型對其進行預(yù)測.當h>r時,由于基于傳統(tǒng)預(yù)估器的控制器仍然含有未來的狀態(tài)而不能實現(xiàn),且含有類似于式(4)的積分項,故傳統(tǒng)預(yù)估器反饋方法不再適用.由文獻[31]和[27]可知,嵌套預(yù)估器反饋[31]和偽預(yù)估器反饋[27]方法都可預(yù)測狀態(tài)x(t+h?r) 的值.基于嵌套預(yù)估器反饋的控制器也含有類似于式(4)的積分項而不易數(shù)值實現(xiàn).故利用偽預(yù)估器反饋[27]的思想,結(jié)合閉環(huán)系統(tǒng)(6),可得 其中,Ac=A+BK.注意到,如果h>2r,預(yù)估器(7) 仍然含有未來狀態(tài)x(t+s) ,s>0,而不可實現(xiàn).結(jié)合文獻[31],本文將建立嵌套?偽預(yù)估器反饋方法.主要思想如下:利用閉環(huán)系統(tǒng)(6)可先預(yù)測x(t+θ1),θ1∈[0,r],即 上面預(yù)估器是可實現(xiàn)的.顯然地,對任意的h?r >0,存在唯一的非負整數(shù)κ使得h?r ∈(kr,(k+1)r].因此,可得到狀態(tài)x(t+s) ,s∈(0,h?r] 的預(yù)測值.則控制器(5)可重寫為 此控制器是可實現(xiàn)的.控制器(10)是由偽預(yù)估器(9)以狀態(tài)時滯r為步長嵌套地得到的,故控制器(10)稱為嵌套?偽預(yù)估器反饋控制器. 注意到,控制器(10)含有多重積分,雖然不影響控制器實現(xiàn),但形式較為復(fù)雜.為此,下面給出僅含一重積分的顯式嵌套?偽預(yù)估器反饋控制器.根據(jù)文獻[32]可得 其中,φ(t)=x(t)?Dx(t?r),fk(·),gk(·) 和?k(·)遞歸地定義為 初值為f0(·)=In,g0(·)=In和?0(·)=Ac. 則可得下面引理,其證明與文獻[32]中定理2 證明類似. 引理 1.設(shè)存在非負整數(shù)κ和θh∈(0,r],使得κr+θh=h.則控制器(10)可寫為 其中,fκ(·),gκ(·) 和?κ(·) 由式(11)所定義. 注意到,引理1 給出了僅含一重積分的顯式嵌套-偽預(yù)估器反饋控制器. 本節(jié)將給出系統(tǒng)(1)和(12)組成閉環(huán)系統(tǒng)的穩(wěn)定性分析.注意到,閉環(huán)系統(tǒng)可寫為 根據(jù)文獻[32]定義一組矩陣函數(shù)如下: pk+1,k+1(δ)=In,qk+1,k(δ)=In,δ=σ?σ0,其中,j ∈I[0,k]:={0,1,···,k}和l∈I[0,k?1],初值為 下面定理將給出保證由式(1)和(12)組成閉環(huán)系統(tǒng)穩(wěn)定的充要條件. 定理1.在假設(shè)1 成立的條件下,令存在非負整數(shù)κ和θh∈[0,r] ,使得κr+θh=h.則由式(1)和(12)組成閉環(huán)系統(tǒng)是漸近穩(wěn)定的當且僅當下面積分時滯系統(tǒng)是漸近穩(wěn)定的. 其中,ξ(?,θ0)=pκ?1?i,j(?)B?(t+θ0),ζ(?,θ0)=qκ?1?i,l(?)B?(t+θ0),?=θh?θ0,pκ,j(·),qκ,l(·)由式(14)和(15)所定義. 證明.注意到,閉環(huán)系統(tǒng)(13)可重寫為 其中 注意到系統(tǒng)(17)與文獻[32]中的系統(tǒng)(1)具有類似的結(jié)構(gòu).根據(jù)引理1 和文獻[32]中定理2 的證明,可得 其中,fκ(·),gκ(·),?κ(·),pκ,j(·) 和qκ,l(·) 由式(11),(14)和式(15)所定義.則將式(19)代入式(18)可得積分時滯系統(tǒng) (16).因此,如果積分時滯系統(tǒng)(16) 是漸近穩(wěn)定的,則由式(17) 可得,式(1) 和(12)組成的閉環(huán)系統(tǒng)是漸近穩(wěn)定的.必要性易得,故省略. 通過把多重積分轉(zhuǎn)化為累次積分,易知積分時滯系統(tǒng)(16)與文獻[27]中式(17)具有類似的形式.故可利用文獻[27]中保證積分時滯系統(tǒng)(17)穩(wěn)定的充分條件分析積分時滯系統(tǒng)(16)的穩(wěn)定性. 由定理1 可知,基于嵌套?偽預(yù)估器反饋方法事實上解決了同時具有輸入和狀態(tài)時滯的中立型時滯系統(tǒng)的鎮(zhèn)定問題.與傳統(tǒng)預(yù)估器反饋和嵌套預(yù)估器反饋[31?32]相比,嵌套?偽預(yù)估器反饋不含有類似于式(4)的積分項.故嵌套?偽預(yù)估器反饋控制器優(yōu)點是,在數(shù)值實現(xiàn)時,無需輸入濾波器便可鎮(zhèn)定原時滯控制系統(tǒng).此外,嵌套?偽預(yù)估器反饋方法還可以推廣到更一般的中立型時滯控制系統(tǒng). 其中,Ai∈Rn×n,i∈I[0,n1] 和Bj∈Rn×mj,j ∈I[0,n2]為定常矩陣,0=r0≤r1≤···≤rn1和0=h0≤h1≤···≤hn2分別是狀態(tài)時滯和輸入時滯. 本節(jié)將嵌套?偽預(yù)估器反饋方法推廣到滯后型時滯系統(tǒng).令D=0,則系統(tǒng)(1)變?yōu)橄旅鏈笮蜁r滯控制系統(tǒng). 則閉環(huán)系統(tǒng)(6)退化成 嵌套?預(yù)估器(8)和(9)分別退化成 和 由于嵌套?偽預(yù)估器(22)與文獻[37]中式(8)具有類似的結(jié)構(gòu).則可得未來狀態(tài)值(t+kr+θk+1) 為 其中,對所有的i∈I[0,k?1], 和Fk+1,k(θ)=Fk,k(θ),Fk+1,k+1(θ)=AcFk,k(θ). 式(24)的初值條件為F0,0=Ac和G0=In. 設(shè)存在非負整數(shù)κ和θh∈[0,r],使得κr+θh=h.由式(23)可得顯式的嵌套-偽預(yù)估器反饋控制器為 下面推論將給出保證閉環(huán)系統(tǒng)漸近穩(wěn)定的充分必要條件. 推論1.假設(shè)存在增益矩陣K,使得系統(tǒng)(21)是漸近穩(wěn)定的.設(shè)存在非負正整數(shù)κ和θh∈[0,r] 使得κr+θh=h.則式(20)和(25)組成的閉環(huán)系統(tǒng)是漸近穩(wěn)定的當且僅當下列積分時滯系統(tǒng)是漸近穩(wěn)定的. 證明.由式(20)和(25)組成的閉環(huán)系統(tǒng)可寫為 其中 注意到式(27)與文獻[37]中的式(1)具有相似的形式.因此,通過引理1[37],可得 其中,Fκ+1,i(·) 和Gκ+1(·) 由式(24)所定義.則將式(29)代入式(28)可得系統(tǒng)(26).因此,如果系統(tǒng)(26) 是漸近穩(wěn)定的,由式(27) 易知,式(20) 和(25)組成的閉環(huán)系統(tǒng)是漸近穩(wěn)定的.必要性易證,故省略.□ 值得注意的是積分時滯系統(tǒng)(26)的穩(wěn)定性分析可參考文獻[38].事實上,本節(jié)利用嵌套?偽預(yù)估器反饋方法,解決了同時具有輸入和狀態(tài)時滯的滯后型線性系統(tǒng)的鎮(zhèn)定問題.本文所提出的方法由第2 節(jié)的中立型時滯系統(tǒng)推廣到第3 節(jié)的滯后型時滯系統(tǒng)是非平凡的,例如定理1 中的充要條件(16)不能直接退化到推論1 的式(26). 考慮同時具有輸入和狀態(tài)時滯的線性系統(tǒng)[39] 其中,系數(shù)矩陣為 B=[0,1]T,狀態(tài)時滯r=0.6. 為了更好地說明本文所提方法的有效性,分別地取三個不同的輸入時滯h=0.9,h=1.5和h=2.設(shè)計狀態(tài)反饋增益矩陣K使得λ(A+BK)={?0.75,?0.8},從而得到 1)h=0:9 根據(jù)等式κr+θh=h,可得κ=1和θh=0.3.下面將利用本文提出的嵌套?偽預(yù)估器反饋控制器補償輸入時滯.由引理1 可知,嵌套?偽預(yù)估器反饋控制器設(shè)計為 2)h=1:5 根據(jù)等式κr+θh=h,可得κ=2和θh=0.3. 由引理1 可知,嵌套?偽預(yù)估器反饋控制器設(shè)計為 3)h=2 根據(jù)等式κr+θh=h,可得κ=3和θh=0.2. 嵌套?偽預(yù)估器反饋控制器設(shè)計為 令初值為x(0)=[1,?1]T.則系統(tǒng)(30)分別與嵌套?偽預(yù)估器反饋控制器(31),(32)和(33)組成閉環(huán)統(tǒng)的狀態(tài)軌跡和控制信號如圖1,圖2 和圖3所示,易知閉環(huán)系統(tǒng)是漸近穩(wěn)定的. 圖1 系統(tǒng)(30)和(31)組成閉環(huán)系統(tǒng)的狀態(tài)軌跡和控制信號Fig.1 State trajectories and control signals for the closed-loop system consisting of (30) and (31) 圖2 系統(tǒng)(30)和(32)組成閉環(huán)系統(tǒng)的狀態(tài)軌跡和控制信號Fig.2 State trajectories and control signals for the closed-loop system consisting of (30) and (32) 圖3 系統(tǒng)(30)和(33)組成閉環(huán)系統(tǒng)的狀態(tài)軌跡和控制信號Fig.3 State trajectories and control signals for the closed-loop system consisting of (30) and (33) 針對同時具有輸入和狀態(tài)時滯的中立型/滯后型時滯控制系統(tǒng),研究僅對其輸入時滯補償問題,提出了嵌套?偽預(yù)估器反饋方法,不同于傳統(tǒng)的預(yù)估器反饋利用開環(huán)系統(tǒng)預(yù)測系統(tǒng)未來的狀態(tài),嵌套-偽預(yù)估器反饋則是利用閉環(huán)系統(tǒng)嵌套地預(yù)測系統(tǒng)未來的狀態(tài),實現(xiàn)對任意大但有界的輸入時滯進行完全補償.結(jié)果表明閉環(huán)系統(tǒng)是漸近穩(wěn)定的當且僅當積分時滯系統(tǒng)是漸近穩(wěn)定的.最后,給出一個數(shù)值仿真驗證所提出方法的有效性.



2 嵌套?偽預(yù)估器反饋
2.1 嵌套?偽預(yù)估器反饋的設(shè)計








2.2 閉環(huán)系統(tǒng)的穩(wěn)定性分析



3 滯后型時滯控制系統(tǒng)







4 數(shù)值仿真





5 結(jié)論
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12