基于置信規則庫的交通監控調度方法研究
2021-12-01 05:26:38李康樂朱海龍
智能計算機與應用 2021年8期
李康樂,孫 超,朱海龍
(1 哈爾濱金融學院 計算機系,哈爾濱 150030;2 哈爾濱師范大學 計算機科學與信息工程學院,哈爾濱 150025)
0 引言
對于交通路口來說,全天候的監控是非常重要的,在違法行為的監督調查,公共安全和交通調度等方面發揮著重要作用。在多攝像機監控系統中,由于攝像機的數量和實時調度帶來的復雜性增加,使用手動協調和控制攝像機監控目標變得十分困難。
目前,許多學者采用了多種方法從多個角度研究監控調度問題。Chen 等人[1]使用神經網絡對攝像機調度進行研究。Spaan 等人[2]提出了一種基于自定義目標的帶有信息獎勵的部分可觀察馬爾可夫鏈模型(Partially Observable Markov Decision Process with Information Rewards,POMDP-IR)框架來選擇最優的靜態監控攝像機。馬慶平[3]將目標優先級這一條件加入到基于POMDP 的多監控攝像調度算法中,將主動監控與被動監控進行結合得到攝像機-目標組合。Song 等人[4]用博弈論的方法解決不同焦距下的監控問題。王洪亮[5]提出了一種分布式多攝像機協同監測方法。
近年來,對監控調度方法的研究主要分為3 類:以數據驅動為核心的機器學習方法、以定性知識為核心的專家系統、以及基于馬爾可夫過程的決策理論。其中,基于數據的機器學習方法在攝像機調度領域存在對數據和模型要求高、對多個復雜路網通用性差、過程可解釋性困難等問題。在基于知識的專家系統中,模擬人的知識和思維是建立在監控過程中的知識和規則基礎上的,對專家知識的要求較高,模型準確性低。在基于馬爾可夫過程的決策理論中,對靜態攝像機和云臺攝像機有很高的要求,需要通過物理空間進行定位和判斷。為了解決攝像機調度過程中的上述問題,本文提出了一種基于BRB的交通監控攝像機調度方法。
BRB 是一個由多個置信規則組成的專家系統,由Yang 等人于2006 年提出,該方法能夠將信息的不確定性加入到模型當中并有效地對其進行表示及處理,從而建立一個可清晰表示輸入與輸出之間非線性關系的模型[6]。在規則庫創建完成后,使用ER 對置信規則進行融合推理[7-8],最后使用效用理論得出最后融合結果[9]。與傳統方法不同,對信息的模糊不確定性以及概率不確定性具有較好的表示能力,因此對于具有非線性特征的數據,具有較好的建模效果[10],并且其建模過程具有可解釋性[11]。基于BRB 的復雜系統建模方法在生產規劃、醫療決策和安全評估中有著廣泛的應用[12-14]。
1 問題描述
在交通攝像機調度中,調度過程可以分為以下步驟:
第一步:監控數據獲取。
第二步:數據傳輸。
第三步:數據處理。
第四步:拍攝質量判斷。每臺相機的拍攝質量根據實際情況而定。
第五步:攝像機調度。根據設定的模型,通過捕捉數據對攝像機進行調度。
在監控攝像機調度過程中,調度問題可以描述為:

其中,y表示調度結果;X表示輸入數據;α表示參數集;f(·)表示模型求解過程。
首先將輸入設置為拍攝效果,即拍攝時的拍攝質量。由于距離、角度等的影響,同一類型相機捕捉到的同一目標是不同的,因此使用距離和角度等參數作為輸入來評價相機的質量。
2 構建監控調度模型
2.1 模型構建
BRB 中含有許多置信規則,其中第k條規則可描述如下:

其中,Rk表示BRB 中的第k條規則;x1,x2,...,xM為第k條規則中的M個前提屬性;A1,A2,...,AM為第k條規則中M個前提屬性對應的參考值;D1,D2,...,DN為第k條規則的N個結果;β1,β2,...,βN為第k條規則中N個結果對應的置信度;θk為第k條規則的規則權重;δ1,δ2,...,δM為第k條規則中M個前提屬性的屬性權重。
2.2 模型推理
2.2.1 計算規則匹配度
在規則庫創建完成后,首先需要對輸入信息進行轉換來計算所有規則的規則匹配度,具體的計算方式如式(3)所示:

其中,ai表示第i個屬性的輸入數據;表示在第k條規則中輸入數據對第i個屬性的匹配度;表示第l條規則中第i個前提屬性的參考值;K表示BRB 中規則總數。
2.2.2 計算激活規則的激活權重
在置信規則庫中包含有許多規則,有些規則在輸入信息轉換完成后是沒有被激活或者激活程度比較小的。通過計算規則的激活權重,可以得到輸入數據對每條規則的激活程度,具體計算方式如式(4)所示:

其中,wk表示第k條規則的規則激活權重;θk表示第k條規則的規則權重;M表示前提屬性的數量;K表示BRB 規則庫中的規則總數。
2.2.3 規則組合
在規則庫中的規則被激活以后,接下來就需要對所有激活的規則進行規則組合,得到綜合的評價結果。融合方式采用ER 進行融合,融合方法如式(5)和式(6)所示:

其中,βn表示對第n個結果的置信度,是綜合規則庫中所有規則所推理出的結果。
2.2.4 計算效用值
規則組合完成以后,根據效用理論,計算最終輸出的效用值,就可以得出模型的最終輸出結果,計算方式如式(7)所示:

其中,y為模型的輸出結果,u(Dn)為結果Dn的效用值。
2.3 模型優化
BRB 模型的初始參數由專家給出,其中含有一定的不確定性以及模糊性。因此,為了得到更好的建模效果,需要對BRB 的初始參數進行優化。
基于P-CMA-ES 的模型參數優化方法[15]可以描述為:

其中,N是在BRB 中設置的評估結果數;K是規則數目;M是前提屬性數目。圖1 對BRB 的優化流程進行了闡述說明。
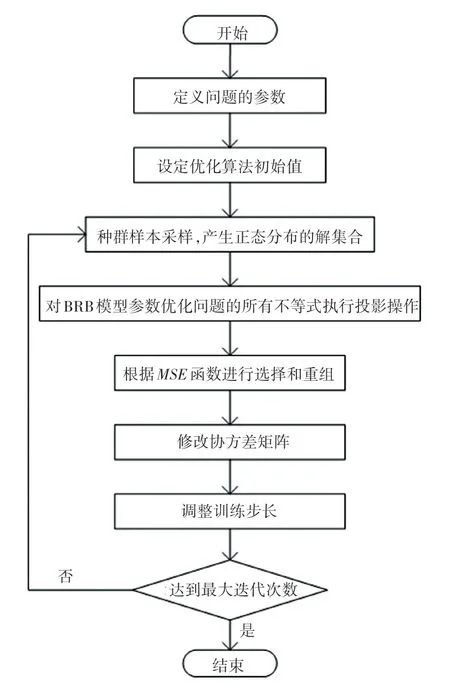
圖1 BRB 參數優化流程Fig.1 BRB parameter optimization process
3 案例分析
3.1 實驗定義
實驗數據集為利用結構化建模獲得的仿真數據集,其中包含距離、角度和評價結果,共480 個樣本數據。隨機選取其中240 個樣本數據對模型參數進行優化,然后使用全部樣本對BRB 模型建模效果進行測試。
3.2 模型參數設置
使用表示距離,表示角度,以這兩個屬性作為BRB 的前提屬性。
距離包含4 個參考點:非常近(very near,VN)、近(near,N)、中等(middle,M)、遠(far,F),可以表示為:

角度包含5 個參考點:優秀(Excellent,E)、好(Good,G)、中等(middle,M)、差(bad,B)、非常差(very bad,VB),可以表示為:

每個屬性的每個參考點都有對應的參考值,距離的參考值以及參考點見表1,角度的參考值及參考點見表2。

表1 距離參考點和參考值Tab.1 Distance reference point and reference value

表2 角度參考點和參考值Tab.2 Angle reference point and reference value
讓y表示BRB 的輸出,其包含4 個參考點:優秀(excellent,E)、好(good,G)、一般(average,A)、差(bad,B),可以表示為:

BRB 輸出的參考點以及相應的參考值見表3。

表3 輸出參考點和參考值Tab.3 Output reference point and reference value
初始置信表見表4。

表4 初始置信表Tab.4 Initial belief table
3.3 實驗結果
在給出初始模型參數后,使用訓練數據集對BRB模型參數進行優化,然后使用測試數據集對模型進行測試。將BRB 輸出結果與神經網絡(Neural Network,NN)、模糊專家系統(Fuzzy Expert System,FES)、徑向基函數(Radial basis function,RBF)和K 均值聚類(k-means)算法進行對比,擬合圖如圖2 所示。

圖2 擬合效果對比Fig.2 Comparison of fitting effect
對樣本數據進行20 輪重復實驗,然后計算個方法的平均MSE值(Mean Squared Error,均方誤差),結果見表5。
由表5 可以看出,對于本次實驗,相較于其他方法,BRB 的平均MSE值最低,建模效果最好。具體原因包含以下幾個方面:

表5 MSE 對比Tab.5 MSE comparison
(1)神經網絡、徑向基函數和K 均值聚類等基于數據驅動的方法對數據具有較強的依賴性,在數據量較少時很難達到較好的建模效果。
(2)模糊專家系統等基于定性知識的方法僅依靠專家知識進行建模,然而專家知識中包含一定的模糊性以及不確定性,同時,由于該類方法不帶有參數優化過程,因此建模效果一般。
(3)置信規則庫可以有效融合定量數據與定性知識進行建模,在小樣本情況下添加了專家知識的輸入,同時可以對模型參數進行優化,因此具有較好的建模效果。
4 結束語
在本文中,提出一種新的基于BRB 的監控攝像機評價模型,該方法適用于多監控攝像機的調度問題。首先,根據專家知識建立BRB 模型初始參數,然后,通過實驗數據對參數進行優化,最后,通過一個案例分析驗證了該方法的有效性。該方法可以有效將定量數據與定性信息進行結合,有效地表示信息中的模糊不確定性和概率不確定性,并在模型中合理地對其進行處理,在工程實踐中具有良好的應用前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
