衛星通信系統兩步隨機接入技術研究
2021-11-30 04:22:20聶玉卿崔高峰王衛東
電訊技術 2021年11期
聶玉卿,崔高峰,王衛東
(北京郵電大學 電子工程學院,北京 100876)
0 引 言
目前,分立的衛星通信系統逐步向著天地異構網絡互聯互通、天地一體化的方向發展[1]。衛星與地面5G技術的融合能夠連通空、天、地、海多維空間,為用戶提供更為可靠的一致性服務體驗,形成一體化網絡格局。為了實現地面終端的一體化,衛星與地面5G的空中接口逐步趨向融合,隨機接入、非正交多址接入等技術在衛星通信中的應用也是目前的研究熱點,然而受限于星上處理能力以及星地鏈路長時延的特點,地面5G中的關鍵技術在衛星系統中的適應性改造與優化是實現星地融合需要解決的重點問題。
作為地面用戶終端與衛星進行交互的第一步,隨機接入技術在衛星通信系統中具有不可或缺的重要意義。通過隨機接入過程,使得用戶自身發送幀時序與網絡上行幀對齊,用戶與網絡取得上行同步后,才能被調度并進行上行傳輸。對于高軌(Geosynchronous Earth Orbit,GEO)衛星通信系統,衛星軌道高度為35 786 km,通信距離遠遠大于地面5G系統,星地鏈路長時延的特點使得完成一次上行接入過程所需的時間大大增加,這給一些具有低訪問延遲需求的應用帶來了挑戰。
為了實現衛星通信系統低延遲以及高可靠性的接入,目前已有部分文獻對衛星場景下的隨機接入技術展開了研究。文獻[2]探討了5G中的隨機接入過程在非地面網絡(Non-Terrestrial Network,NTN)中的應用,并給出了可行的解決方案。文獻[3-4]研究了衛星通信系統多用戶場景下的隨機接入信號檢測算法,從提高用戶接入成功率的角度,避免多次接入產生的較長接入時延。文獻[5]研究了多個用戶發起的隨機接入過程發生碰撞后的退避算法,使系統能在更短的時間內有更多的用戶成功實現上行接入。然而,上述文獻均是在采用傳統四步隨機接入方案的基礎上進行優化,用戶與衛星通過四次消息交換導致接入過程較長延時的問題仍然存在。目前,3GPP及其工作組針對地面場景提出了兩步隨機接入方案[6],該方案通過兩次消息傳遞完成上行隨機接入,與傳統的四步隨機接入相比大大降低了接入過程的時延。但是目前關于兩步隨機接入技術的研究僅考慮了地面場景,且仍處于標準化過程中,尚未有相關研究將該方案應用于衛星場景并做出適應性的設計。
本文對衛星場景下兩步隨機接入方案中的信道設計以及多用戶信號檢測問題進行研究,提出了一種兩步隨機接入信道設計方案,對兩步隨機接入信道中數據部分的信道結構以及前導和數據之間的映射方式進行了設計。此外,針對多個用戶發起接入時兩步隨機接入信號中數據部分發生碰撞導致解碼性能降低的問題,采用多用戶共享接入(Multi-user Shared Access,MUSA)方式發送數據部分,并提出一種多判決排序串行干擾消除(Multi-decision Ordered Successive Interference Cancellation,MD-OSIC)算法對發生碰撞的數據進行檢測,降低誤差傳播對檢測性能造成的影響,實現高效率低延時接入。
1 系統模型
考慮衛星場景上行隨機接入過程,該場景包括一個GEO衛星和N個用戶,N≥1。N個用戶采用兩步隨機接入方案向衛星發起上行接入請求,兩步隨機接入流程如圖1所示。
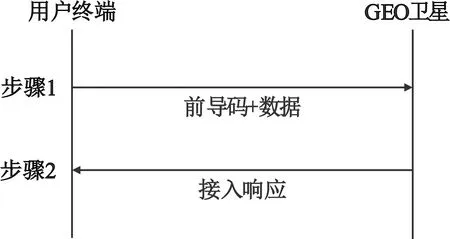
圖1 兩步隨機接入流程
在傳統四步隨機接入過程中,步驟1和步驟3分別傳輸一個隨機選擇的前導序列以及一個數據包,在兩步隨機接入過程中這兩個步驟被合并為步驟1。兩步隨機接入中的步驟2為GEO衛星向用戶終端發送一個反饋信號,告知用戶終端接入是否成功。通過簡化隨機接入過程,兩步隨機接入與四步隨機接入過程相比在降低延遲以及信令開銷方面更有優勢[7]。步驟1中,用戶終端發送給GEO衛星的消息定義為消息A(message A,msgA)。msgA包含前導碼以及數據部分兩部分,其中,前導碼在物理隨機接入信道(Physical Random Access Channel,PRACH)傳輸,數據部分在物理上行共享信道(Physical Uplink Shared Channel,PUSCH)傳輸[8],msgA的前導碼和數據部分時分復用[6],并在PRACH與PUSCH之間預留一定的時間間隔[9]。msgA信道結構如圖2所示。
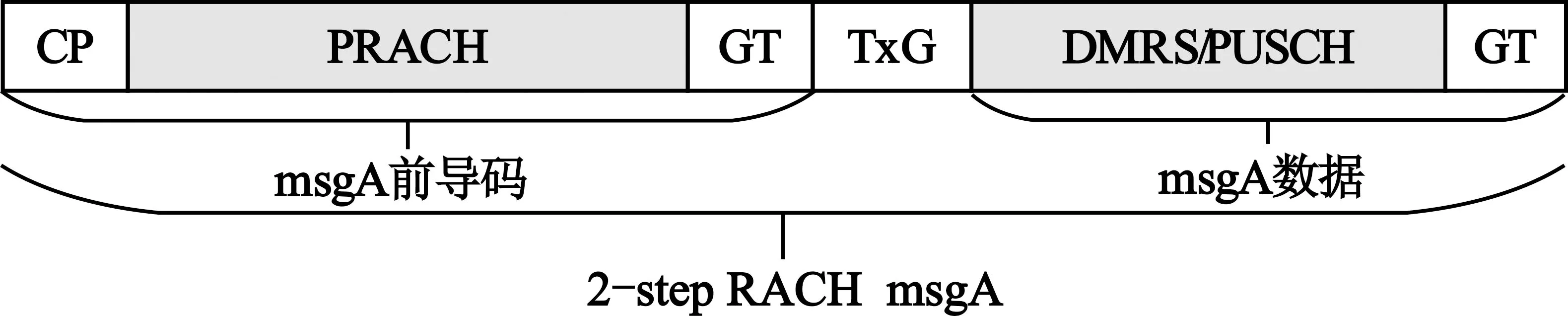
圖2 msgA信道結構
考慮到用于傳輸msgA數據部分的時頻資源有限,并且在未完成上行同步時基站無法統一對用戶終端進行調度,因此在數據部分采用具有免調度特性的MUSA技術。本文設計的多用戶兩步隨機接入系統模型如圖3所示。
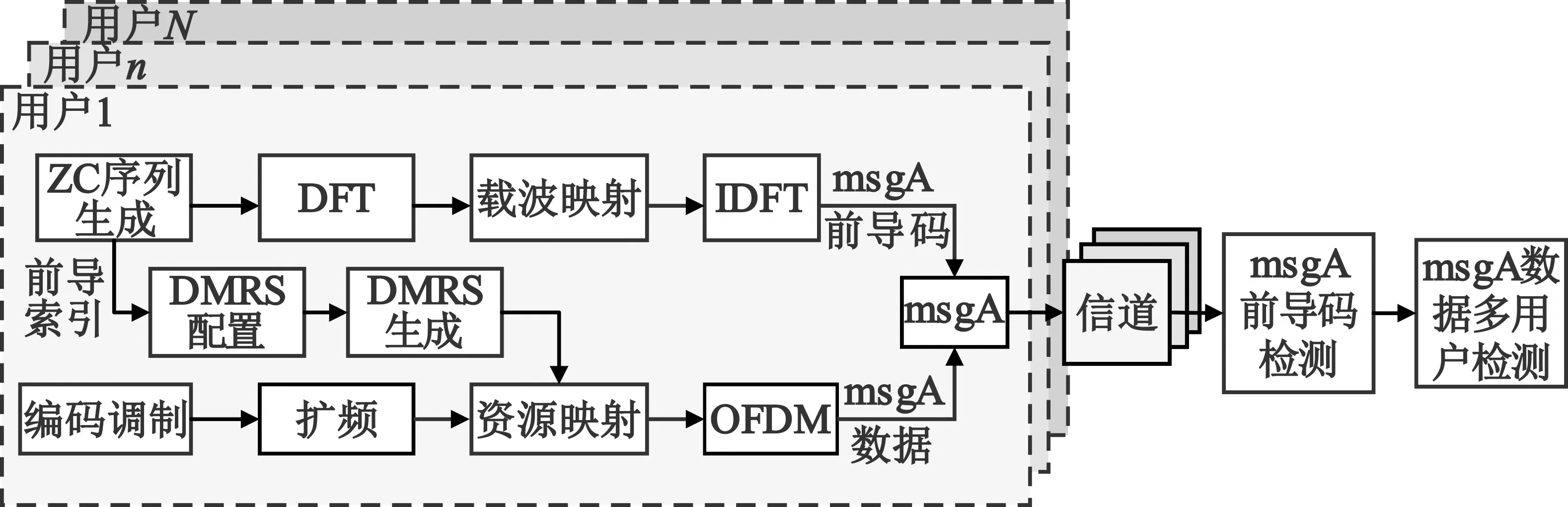
圖3 多用戶兩步RACH系統模型
首先,用戶隨機選擇一個根索引值以及循環移位值,生成具有良好自相關性與互相關性的ZC序列,經過離散傅里葉變換(Discrete Fourier Transform,DFT)、子載波映射、離散傅里葉逆變換(Inverse Discrete Fourier Transform,IDFT)等模塊生成msgA前導碼信號。其中,根據前導序列根索引值及循環移位值確定解調參考信號(Demodulation Reference Signal,DMRS)產生所需的參數,生成與用戶選擇的前導序列相對應的DMRS。然后,對數據部分進行編碼調制,并將調制后的符號與該用戶隨機選擇的擴展序列相乘進行擴頻,擴展序列采用序列長度為4的復數三元序列[10]。根據前導序列索引值確定DMRS及數據部分的映射位置,對DMRS與擴頻后的數據進行資源映射,經過快速傅里葉逆變換(Inverse Fast Fourier Transform,IFFT) 生成msgA數據信號,完成msgA信號的發送。接收端首先對msgA的前導碼進行檢測,若檢測成功,則根據檢測得到的前導索引值進行msgA的數據部分檢測,數據部分采用MD-OSIC方案對多用戶疊加數據進行逐一檢測。
2 msgA信道設計方案
與傳統四步隨機接入不同,兩步隨機接入在第一步中除了傳輸前導碼以外,還需要傳輸一部分承載上層信息的數據比特,這給msgA的信道設計帶來了難點。首先,需要設計前導序列與對應數據之間的映射關系,使得接收端檢測到該用戶的前導序列之后可以通過前導索引信息確定數據部分的映射位置以及檢測所需的相關參數;此外,考慮到用于msgA數據傳輸的資源有限,需要采用非正交方式提升頻譜利用率,這會使得接收端各個用戶的數據相互混疊,不但需要在接收端設計有效的接收算法實現多用戶檢測,也需要在發送端對數據信道進行設計保證用戶數據檢測的準確性。
2.1 msgA PRACH設計
根據圖2所示的msgA信道結構可知,msgA信道中包含PRACH與PUSCH兩部分,其中關于衛星場景下隨機接入前導格式的設計已有很多文獻展開了研究。本文在msgA PRACH部分采用時延預補償方案[11],前導信號長度為3 ms,其中循環前綴(Cyclic Prefix,CP)長度為0.3 ms,前導序列長度為2.4 ms,保護時間(Guard Time,GT)長度為0.3 ms,PRACH信道時域上占用無線幀中的前3個子幀,頻域占用1.08 MHz帶寬,64個前導碼在同一時頻資源中碼分復用。msgA PRACH時域結構如圖4所示。

圖4 msgA PRACH時域結構示意圖
2.2 msgA PUSCH設計
通過參考目前3GPP已采納的msgA PUSCH參數配置[12],令msgA PUSCH頻域上占用1.08 MHz帶寬,即6PRB(Physical Resource Block),與PRACH占用相同的頻域資源[13];時域上為14個OFDM符號。
關于DMRS的設計,在目前地面場景的討論中一般使用不同的DMRS端口,通過將前導碼映射到不同的DMRS端口,降低PUSCH沖突的概率。由于地面支持多天線傳輸,接收端可配置的天線數[13]為2、4、8,而本文考慮的衛星場景中不支持多接收天線,即只有一個天線端口配置,目前地面通過多個DMRS端口降低PUSCH沖突的方案在衛星通信中無法適用。因此,本文提出了如圖5所示的msgA PUSCH結構。
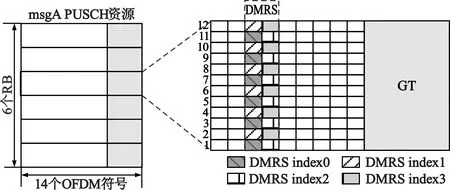
圖5 msgA PUSCH時頻結構示意圖
為了與地面5G系統融合,在DMRS設計上參考5G中的DMRS導頻類型,采用梳狀加碼分正交復用方式,雙符號DMRS結構。其中,第三個符號中子載波索引為奇數(假設編號從1開始)的RE(Resource Element)定義為DMRS index0,子載波索引為偶數的RE定義為DMRS index1;第四個符號中子載波索引為奇數(假設編號從1開始)的RE定義為DMRS index2,子載波索引為偶數的RE定義為DMRS index3。通過這種配置方式,將前導碼映射到不同時頻位置的DMRS index,當數據部分發生碰撞時,接收端可以通過獨立的DMRS信道估計進行多用戶檢測,分別進行解碼,提高檢測的成功率。
在PUSCH資源后需要添加GT,避免符號間干擾。根據時延預補償方案[12],GT應大于0.3 ms。考慮到5G中OFDM符號持續時間為66.67 μs,為了保證幀對齊,令GT長度為5個OFDM符號,即0.33 ms。
2.3 PRACH與PUSCH之間映射關系
在傳統的四步隨機接入中,步驟3中用戶發送給基站的數據所占用的資源由基站進行調度分配,多個用戶對應的數據可能會被分配相互正交的時頻資源。然而在基于競爭的兩步隨機接入過程中,msgA中用于傳輸數據的PUSCH資源是預先分配好的,多個用戶對應的數據部分可能會被分配到相同的PUSCH資源,這種情況下,不同用戶的數據之間有一定的概率發生碰撞,需要采用非正交多址接入技術及相應的干擾消除方案,在接收端解碼每個用戶對應的數據部分。若無法正確檢測msgA的數據部分,則需要重新傳輸msgA或者回退到四步隨機接入。
為了降低不同用戶數據部分的碰撞概率,同時提高頻譜利用率,本文對msgA的信道進行了設計。首先,將有限的msgA PUSCH資源進行劃分,通過對用戶所有可能選擇的前導碼進行分組,使得不同組內的前導碼對應的數據映射到正交的時頻資源塊,從而降低數據部分發生碰撞的概率。在本文中將msgA PUSCH資源劃分得到的正交資源定義為PUSCH occasion(PO)。對于給定的6個PRB的msgA PUSCH資源,劃分為兩組的性能更好[14]。盡管劃分更多的PO可以使不同前導碼對應的數據具有更低的碰撞概率,但是低碼率可以彌補性能損失的整體影響。因此,擬采用將msgA PUSCH資源劃分為2個PO,每個PO頻域上占用3個PRB,如圖6所示。
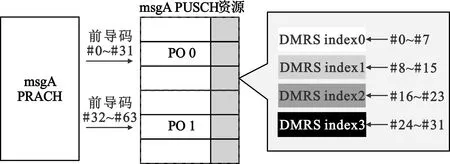
圖6 前導碼到PUSCH/DMRS映射關系
此外,為了避免數據部分的盲解碼,設計了用戶所有可能選擇的64個前導碼與其對應數據部分之間的一一映射關系。其中,前導碼0~31對應的數據部分映射到PO 0,前導碼32~63對應的數據部分映射到PO 1。每個PO中有4個具有不同時頻位置的DMRS index,即同一PO中的32個前導碼對應的數據映射到4個不同的DMRS index,使得每個DMRS index有8個前導碼對應的數據部分復用。對于每一個DMRS index,設定8個不同的DMRS序列,即對于PO與DMRS index均發生碰撞的數據,通過不同的DMRS序列進行區分。具體映射關系如表1所示,其中,PO指示數據映射到不同的頻率位置,如圖6所示;DMRS位置為0表示DMRS位于當前子幀的第3個符號,DMRS位置為1表示DMRS位于當前子幀的第4個符號;映射圖樣為0表示DMRS映射到奇數子載波,映射圖樣為1表示DMRS映射到偶數子載波。根據上述配置,通過對前導碼對應的數據部分以及DMRS的時/頻/碼分復用,實現一一映射關系。
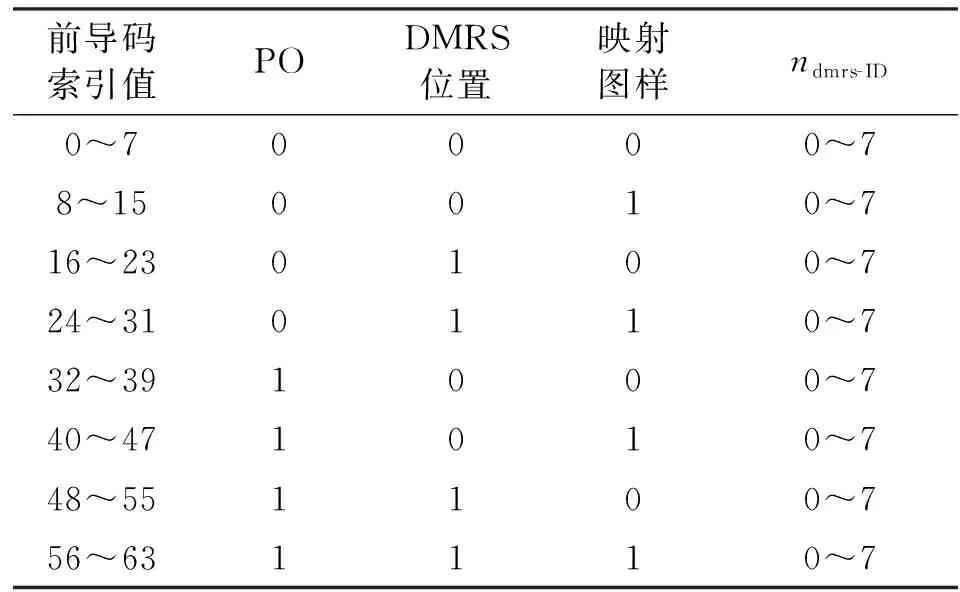
表1 映射關系配置表
3 多用戶檢測算法
接收端接收到msgA信號后,首先檢測msgA PRACH部分,確定用戶發送的前導碼索引。若前導碼檢測成功,相關聯的PUSCH資源可以通過前導碼和PUSCH/DMRS之間的映射關系識別。然后,接收端將檢測PUSCH部分。其中,接收端可以通過PRACH檢測估計時偏,并在PUSCH檢測前根據估計的定時偏移量調整接收信號的時間窗口。接收框圖如圖7所示。

圖7 msgA接收框圖
PRACH檢測算法與傳統四步隨機接入中的檢測算法相同[15],本文重點在于提出了與所設計信道結構對應的PUSCH數據部分的檢測流程以及改進算法。
3.1 數據碰撞情況分析
當多個用戶發起兩步隨機接入時,由于多用戶選擇的前導碼對應的數據可能映射到相同的時頻資源導致發生數據碰撞,因此下面首先對msgA PUSCH檢測時可能出現的情況進行分析。如圖6所示,以兩個用戶選擇不同前導碼為例。
(1)情況1:兩個前導碼對應的數據映射到不同PO。
如用戶0選擇了前導碼索引#1,用戶1選擇了前導碼索引#60,此時兩個前導碼對應的數據部分映射到正交資源上,沒有發生碰撞,可以通過解碼不同頻域位置的PO得到相應的數據信息。
(2)情況2:兩個前導碼對應的數據映射到相同的PO、不同的DMRS index。
如用戶0選擇了前導索引#1,用戶1選擇了前導索引#15,此時兩個前導碼對應的數據部分都映射到PO0,但是用戶0對應DMRS index0,用戶1對應DMRS index1。這種情況下,雖然數據部分在時頻域發生重疊,但是接收端通過不同位置的DMRS信道估計進行多用戶檢測,根據不同的信道估計結果進行串行干擾消除,可以對碰撞數據進行解碼。
(3)情況3:兩個前導碼對應數據映射到相同的PO、相同的DMRS index。
如用戶0選擇了前導碼索引#1,用戶1選擇了前導碼索引#7,此時兩個前導碼都映射到PO 0、DMRS index 0。但是由于一個DMRS index位置有8個正交的DMRS碼分復用,前導碼#1 與前導碼#7對應了不同的DMRS。DMRS由具有良好自相關與互相關性質的ZC序列生成,因此可以利用碼分復用的正交DMRS進行信道估計,通過串行干擾消除技術對碰撞數據進行解碼。
對于情況1,首先根據檢測到的前導碼根索引值和循環移位值確定前導碼的索引號,取值范圍為{0,1,…,63},根據msgA PRACH與msgA PUSCH/DMRS的映射關系可以確定數據部分以及DMRS所在的時頻位置,然后直接對該位置的數據進行解碼。
對于情況2和情況3,根據圖6所示的前導碼與PUSCH/DMRS之間的映射關系可知,32個前導碼共用一個PO資源,當多個用戶選擇了不同前導碼但是相同PO資源時,會發生數據碰撞。因此,當多用戶發送隨機接入請求時,接收端需要采用串行干擾消除技術逐一對PUSCH數據進行解碼。
3.2 msgA PUSCH檢測流程
為了更好地進行描述,首先定義如下變量:
num:發起兩步隨機接入的用戶數。
preamble_index:發送的前導索引集合。
detect_preamble_index:檢測到的前導索引集合。
pusch_occasion:msgA PUSCH數據映射到的時頻位置,取值為[0,1]。
pusch_occasion_num:msgA PUSCH數據可以映射到的時頻位置數量,取值為2。
num_index:映射到 pusch_occasion 0或pusch_occasion 1的用戶數,num_index≤num。
根據3.1節的分析,可以將檢測流程整理如下:
Step1 PRACH判決。若判決正確,即preamble_index = detect_preamble_index,則繼續進行Step 2;否則判決失敗,結束流程。
Step2 根據檢測到的前導索引集合確定num個用戶的數據映射位置pusch_occasion。
Step3 pusch_occasion從0到1循環開始
Step3.1 判斷映射到該位置的用戶數num_index。
Step3.2 如果num_index=0,則返回Step 3;如果num_index=1,則跳到Step 3.3,如果num_index>1,則跳到Step 3.4。
Step3.3 只有一個用戶數據映射到該時頻資源位置,進行單用戶檢測,得到該用戶的解調信號。其中,單用戶檢測流程與5G中PUSCH接收端流程相同。
Step3.4 有多個用戶數據映射到該時頻資源位置,進行多用戶檢測,依次得到每個用戶的解調信號。本文提出的多用戶檢測算法在3.3節進行介紹。
Step4 對num個用戶的解調信號進行信道解碼,并統計誤碼率。
3.3 多判決排序串行干擾消除算法
MUSA采用非正交復數擴展序列,各用戶的數據也是非正交地混疊在相同的時頻資源中。為了應對用戶間的多址干擾,在接收端通常采用基于線性檢測的干擾消除算法MMSE-SIC進行多用戶檢測。然而,MMSE-SIC算法會存在誤差傳播的現象,即利用已檢測用戶的錯誤估計信息進行干擾消除,會給后續未檢測用戶引入新的干擾,導致系統性能惡化。為了克服傳統MMSE-SIC算法存在的誤差傳播問題,提高用戶檢測信息的可靠度,文獻[16]針對MIMO系統提出了一種多反饋串行干擾消除(Multiple Feedback Successive Interference Cancellation,MF-SIC)算法,該算法通過預先定義閾值進行陰影區域約束,對位于陰影區域內的符號進行多次反饋判決,以提高估計信號的準確性。然而該算法在待檢測用戶的選擇策略上未進行優化,沒有在進行串行干擾消除前對用戶進行可靠性排序。本文針對MUSA系統提出了一種MD-OSIC算法。首先計算所有用戶的信干噪比(Signal to Interference plus Noise Ratio,SINR)并進行排序,優化用戶的選擇策略;然后進行MMSE線性檢測,并對位于不可靠區域內的符號進行多次判決,增大分集增益,從而有效減輕由于誤差傳播帶來的影響。
3.3.1 不可靠區域判決
以QPSK為例,圖8為QPSK星座圖的不可靠區域示意圖,其中D為兩個星座點之間的距離,d為不可靠區域大小,令dth=d/D,當MMSE檢測得到的符號位于該區域,即判決不可靠,需要進行下一步的多判決排序串行干擾消除,否則直接對該符號進行硬判決。dth越大,不可靠區域范圍越大,需要進行多判決的符號數越多,相應的算法耗時也會增加。
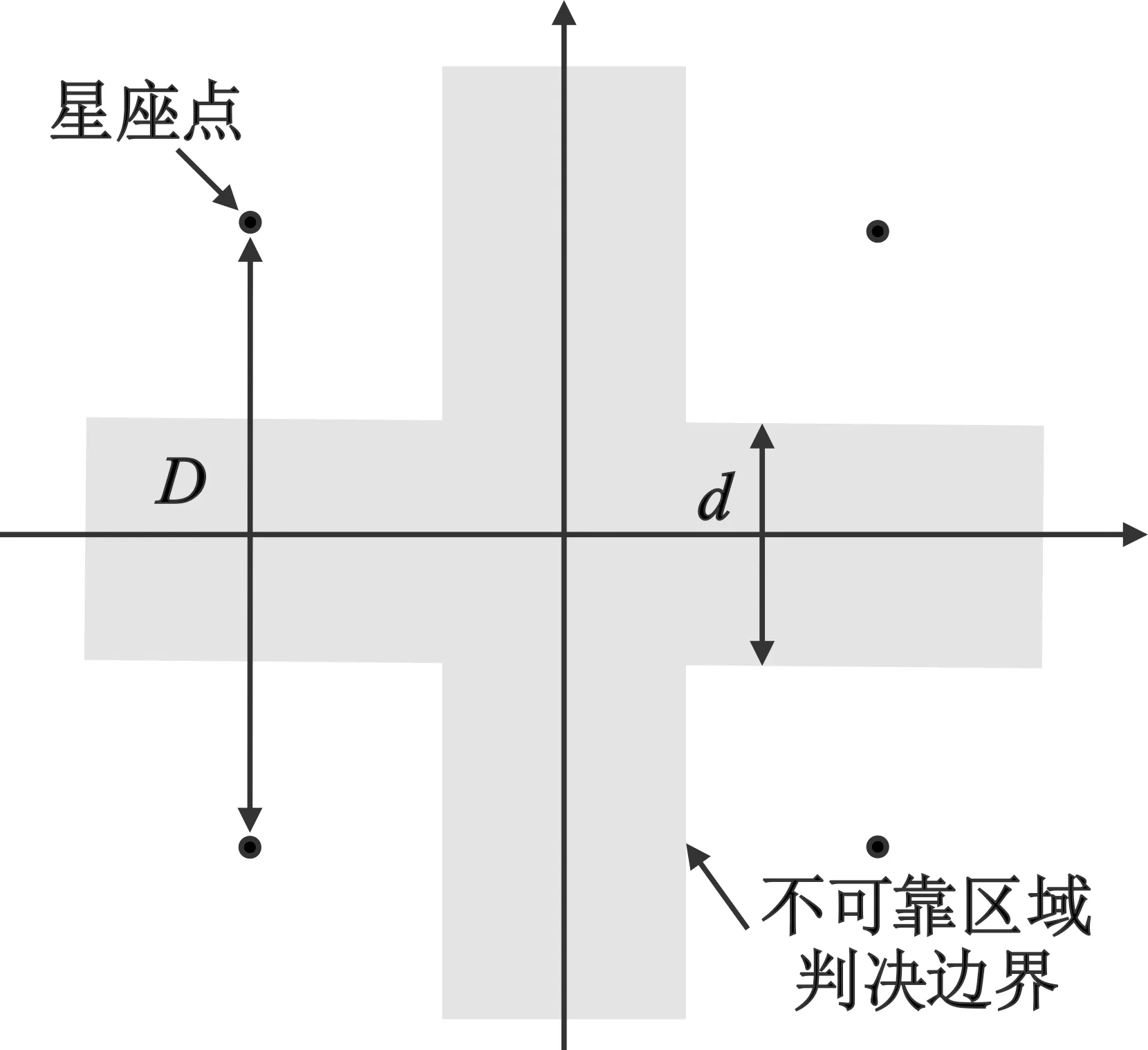
圖8 不可靠區域示意圖
3.3.2 算法流程設計
首先計算所有未檢測用戶的SINR,并選取SINR最大的用戶作為待檢測用戶,進行線性MMSE檢測。然后對該符號進行不可靠區域判決,若該符號沒有落在該區域內,則認為判決可靠,重構該用戶數據并從疊加符號中刪除,繼續進行下一個用戶的檢測;若該符號位于該區域內,則認為判決不可靠,需要進行多判決過程。算法框架如圖9所示,其中候選集合為該調制方式所有星座點的集合。
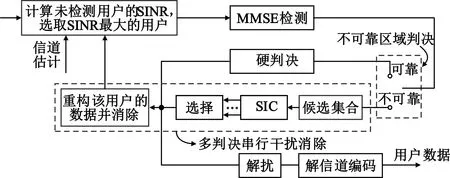
圖9 MD-OSIC算法框圖
本節描述的流程是在3.2節中Step 3.4基礎上進行,即當前PO上有多個用戶數據發生碰撞時,進行下述MD-OSIC算法流程。
為了更好地進行描述,首先定義如下變量:
m:當前檢測的符號索引,m∈{1,2,…,M}。
k:當前檢測的用戶索引,k∈{1,2,…,K}。
Sm:接收到的第m個疊加信號。
xk,m:用戶k實際發送的第m個符號。

sk,m:多反饋MMSE-SIC后確定的用戶k的第m個符號。
vi:候選符號,i∈{1,2,…,I},I為調制階數,v為該調制方式所有星座點的集合。
P[·]:調制。
Q[·]:解調。
MD-OSIC算法偽代碼如下:
1符號m從1到M循環開始
2 計算K個用戶的SINR,并按照從大到小的順序排序為檢測順序
3 用戶k從1到K循環開始

6 候選符號vi從v1到vI循環開始
7 假設xk,m為vi
8 進行MMSE-SIC,確定用戶k+1到K的判決符號為[gk+1,M,gk+2,M,…,gK,M]
9 得到bm,i=[s1,m,s2,m,…,sk-1,m,vi,gk+1,M,gk+2,M,…,gK,M]

11 對sk,m進行解調解碼,得到用戶數據
12 更新Sm=Sm-h·sk,m,返回第3步
13 返回第1步
4 仿真與分析
在本文中,msgA PRACH的檢測性能用漏檢概率和虛警概率評估,msgA PUSCH的檢測性能通過誤碼率評估。仿真過程中,數據部分的誤碼率統計是在前導碼檢測成功的基礎上進行的。仿真參數配置如表2所示。
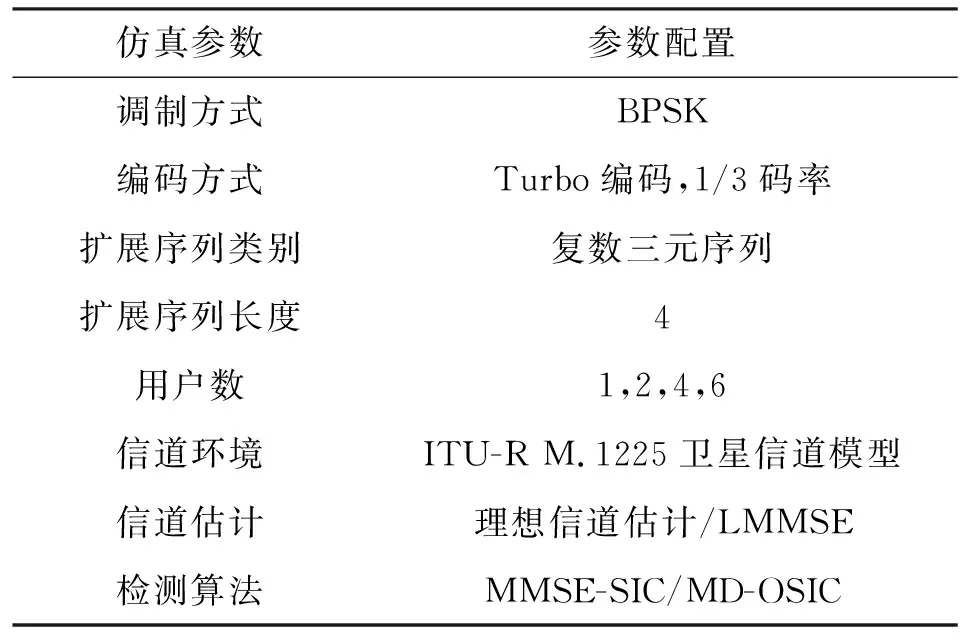
表2 仿真參數配置
衛星信道下msgA PRACH的檢測性能如圖10所示。當Es/No=-16 dB時,檢測概率達到99.8%,虛警概率為0.01%,滿足3GPP所規定檢測概率在99%以上時虛警概率低于0.1%的指標要求。
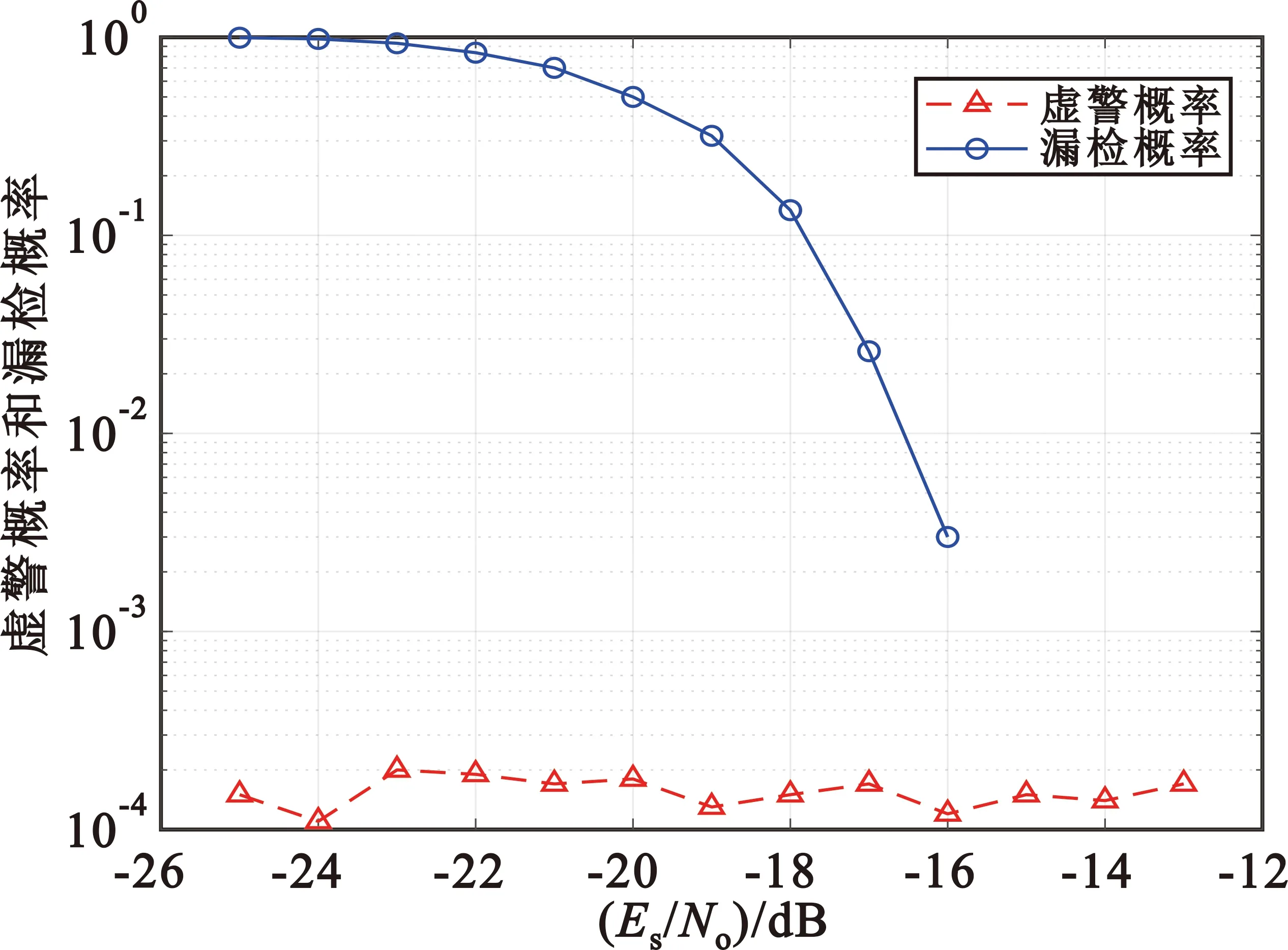
圖10 msgA PRACH 漏檢及虛警概率
理想信道估計方案下,msgA PUSCH檢測性能如圖11所示。其中,傳統方案為MMSE-SIC算法,本文方案為MD-OSIC算法,dth=0.2。
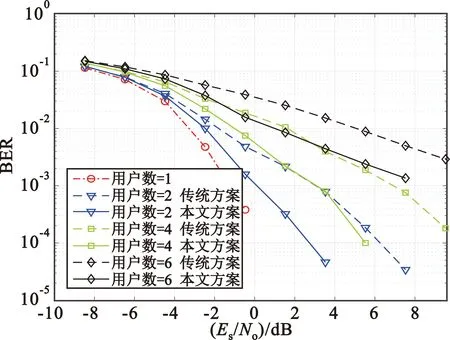
圖11 msgA PUSCH誤碼率(理想信道估計)
當有兩用戶發起兩步隨機接入時,傳統方案在Es/No=6.2 dB時誤碼率達到10-4,本文方案在Es/No=2.8 dB時誤碼率達到10-4,本文方案相比于傳統方案在用戶數為2時有大約3.4 dB的性能增益。對于用戶數為4和6時,本文方案同樣具有更優的檢測性能。
圖12給出了分別采用理想信道估計與LMMSE信道估計方案時MD-OSIC算法誤碼率性能曲線。由于信道估計誤差的存在,在用戶數為1和2時,LMMSE算法相比于理想信道估計有大約1.2 dB的性能損失。
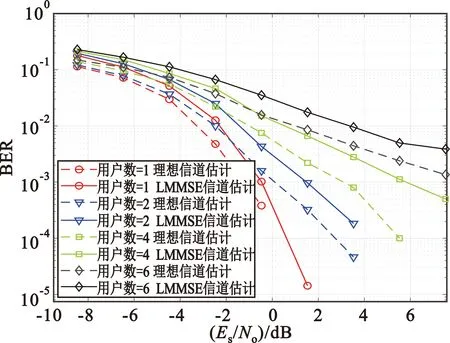
圖12 msgA PUSCH誤碼率(MD-OSIC算法)
在本文方案中,不可靠區域的大小會影響檢測性能,因此本文對4用戶采用理想信道估計方案時不同dth對誤碼率性能的影響進行了仿真評估,如圖13所示。與dth=0.1相比,dth=0.2時其不可靠區域范圍更大,會有更多的符號需要進行多次判決,因此其檢測性能優于dth=0.1的情況;當繼續增大不可靠區域至dth=0.3 時,其性能與dth=0.2接近,對誤碼率性能的提升較小,這是由于繼續增大不可靠區域后,該區域內增加的多判決符號判決失敗原因并非由誤差傳播問題導致,因此dth的取值并非越大對性能提升越明顯。通過對算法計算量和系統性能的折中考慮,在本文仿真條件下,令dth=0.2可獲得更優的檢測性能。
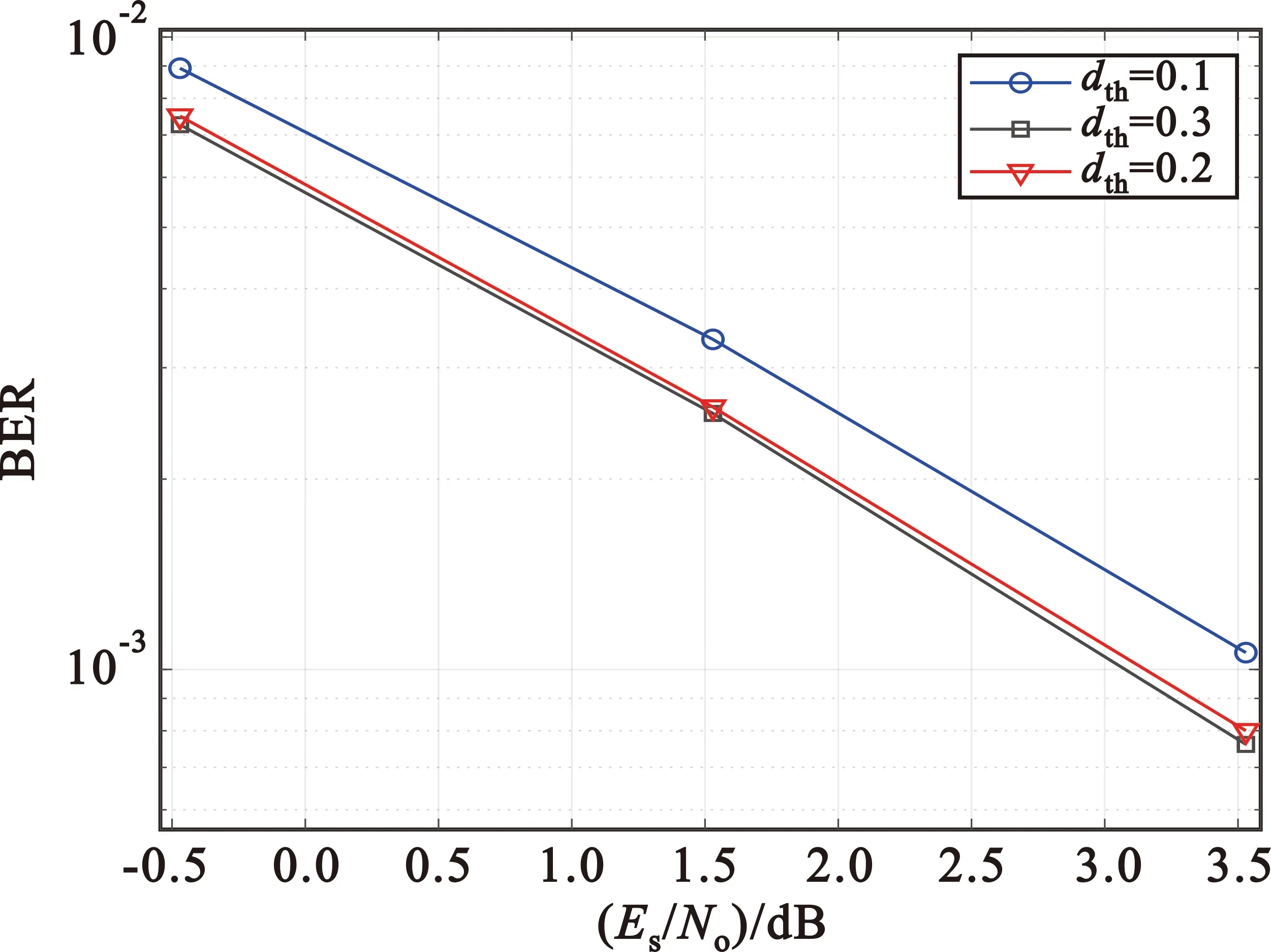
圖13 dth對誤碼率性能的影響
5 結 論
本文針對衛星場景提出了一種兩步隨機接入信道設計方案,對數據部分信道結構以及前導與數據部分之間的映射關系進行了重新設計,并給出了該信道設計方案下詳細的收發兩端信號處理及檢測流程。針對傳統串行干擾消除算法由于存在誤差傳播問題導致解碼性能降低的問題,提出了一種MD-OSIC檢測算法。仿真結果表明,本文提出的信道設計方案以及收發兩端的信號處理流程能夠實現多用戶的兩步隨機接入過程,本文提出的接收端改進算法能夠有效改善數據部分的誤碼率性能。仿真結果驗證了所設計信道及檢測算法在典型衛星通信場景下應用的可行性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
幼兒園(2021年6期)2021-07-28 07:42:14
小學生學習指導(低年級)(2019年11期)2019-11-25 07:31:48
小學生導刊(2017年13期)2017-06-15 20:29:38
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
商用汽車(2016年4期)2016-05-09 01:23:12