基于MPC的自動駕駛車輛橫向跟蹤研究
2021-11-24 08:06:53李昊姜龍龍吳鑫釗李培慶
科海故事博覽·上旬刊 2021年11期
李昊 姜龍龍 吳鑫釗 李培慶
摘 要 為提高自動駕駛車輛的安全性能和可靠的控制性能,本文針對車輛的軌跡跟蹤問題進行了橫向控制策略設計。根據車輛運動學模型,基于MPC(模型預測控制)算法搭建車輛軌跡跟蹤控制策略模型,通過控制車輛前輪轉角來實現車輛跟蹤目標軌跡。使用carsim/simulink聯合仿真平臺對搭建模型進行仿真驗證,結果表明所設計的自動駕駛橫向控制策略能夠穩定實現軌跡跟蹤的既定目標,具有實際應用的前景。
關鍵詞 自動駕駛 MPC 橫向控制 軌跡跟蹤
中圖分類號:TP27 文獻標識碼:A 文章編號:1007-0745(2021)11-0012-02
1 前言
隨著我國交通運輸行業發展以及信息技術的迭代升級,汽車行業目前已經轉入自動駕駛時代[1]。其中,自動駕駛橫向控制是自動駕駛熱點研究之一,主要研究目標就是設計橫向控制策略確保車輛沿目標軌跡完成跟蹤任務。
常用的自動駕駛橫向跟蹤算法有:PID控制、神經網絡模糊控制、前向增益性二次調節控制和MPC控制。文獻[2]提出了具有抗干擾性能的PID控制,其具有直接反饋的線形特性。LI[3]則是對于輪轂電機進行了控制策略設計,使用勢場法,通過可以使用的勢場函數方程對參考角度進行最優求解,以此來在不同層級上對車輛進行控制,車輛在設計的控制策略的操控下,正常地完成了在規定的道路界限內的行駛工作,因此設定的跟蹤軌跡的目標達成。文獻[4]利用滑膜控制器來對自動駕駛車輛的控制需求進行了算法邏輯的搭建,設計觀測器同時具備隨著指數變化同期收斂變化的功能,控制過程所需要的特定變量可以在這一過程中進行測得,最大限度地保證了對于車輛控制的魯棒性,不同于其他滑膜控制器的抖動問題,這一問題在設計中也得到了改善。由于MPC控制可以處理控制目標的多維約束對象的干涉問題,也因此在無人駕駛的控制領域中有著廣泛的應用。
2 車輛動力學模型
在驗證所提出設計的基于MPC的控制器的實現性能,本文采用完成先驗性假設的運動學模型,其中目標的前后輪的載荷等數據進行了線性的計算處理,空氣動力學的影響同時進行了一定的忽略和先導性假設,控制系統中的狀態量和輸入也可以優先確定,由此最大程度地完成對于設計的控制策略來進行實驗性檢驗。而對于常用的車輛控制原模型上,有兩種模型可供選擇。一類是將車輛認定為運動單點的運動學模型,在這一模型中車輛的縱向速度,橫向速度和橫擺角速度作為可選擇的控制輸入量,輸入參量作為車輛中間狀態量被看作假設控制輸入,車輛的實際操作系統(直線行駛和轉向系統)將會實現這些設定的輸入參數。整個運動學的控制邏輯是分層級式的控制系統,上層控制邏輯是橫向控制的軌跡跟蹤,控制輸入量則是作為低一層級的控制系統來實現底層的控制意圖。另一種車輛模型則是考慮側向動力學和輪胎動力學的動力學模型,這一模型的設計更為復雜,存在非線性系統的擾動和不同約束的干涉問題。動力學模型的控制輸入則是車輛實際運行的機械系統的輸出,這樣的優點是方便更快搭建控制算法的邏輯架構,并且具有簡潔的優勢。本文采用的運動學模型將作為控制模型的建模對象,搭建應用于跟蹤軌跡的橫向控制器系統。
3 MPC跟蹤控制器設計
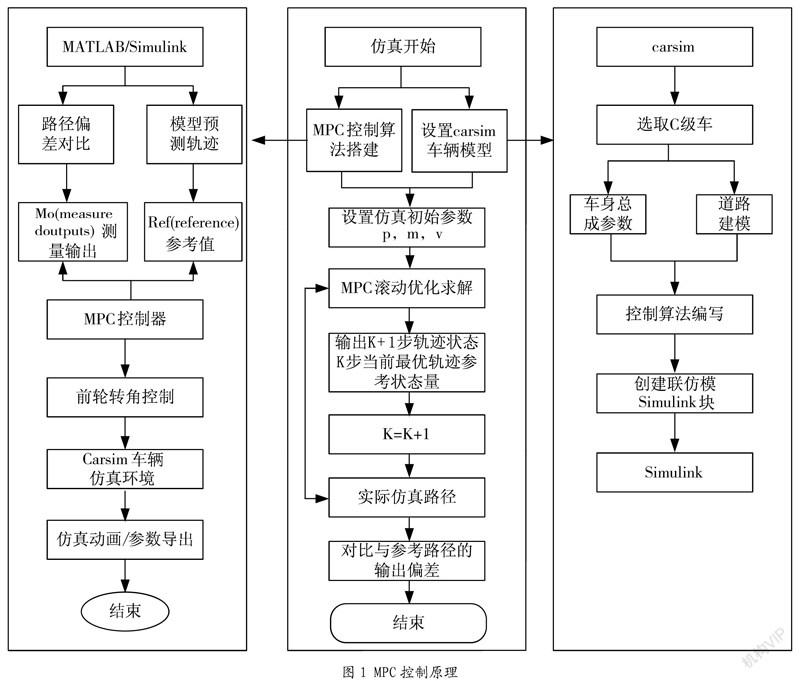
MPC橫向跟蹤控制器原理如圖1所示,包括了MPC控制流程和聯合仿真平臺的工作關系。
在一開始選擇原型車,將該車的總成參數和模擬的行駛環境進行數理建模,建立相對應的動力學狀態空間方程,并寫入設計的控制內核思路。然后,我們將規劃結合MPC控制律的優化函數并且同時考慮約束,之后再根據預測控制方法求解損失函數。因為研究主要關注在控制策略的搭建上,假設側偏角和輪胎滑移率等數值為估算值,估算結果對于后續研究具有重要作用。
在矩陣運算上,設定偏差量為觀測量輸出,同一層級上將軌跡的參考值為輸入,上述變量作為MPC控制器的輸入,至此車輛的前輪轉角得到理想狀態下輸入設定。輸入之后,MPC對初始參數進行滾動優化求解,將k定義為當前參考狀態數值,k+1步(未來的系統輸出)的計算量作為實際值的結果來輸出控制。每一個狀態量和參數在任何一個采樣時間點的數值不作為特定輸出結果,而從一個時刻劃分至未來某個時刻之間的區間時刻作為計算目標,同時隨著時間點的推移這一計算目標也滾動優化,不斷計算出新的最優結果是一直建立在實際系統工作的基礎上并且實時刷新這一過程所出現的不確定性觸發的優化計算流程,這種有限度的時間刻度上的滾動優化計算具有更有效的計算效率。
滾動優化過程中存在的非線性干擾等因素會使得計算結果和實際輸出有所插入,這時增加額外的反饋校正,將實際仿真路徑信息反饋輸入至滾動優化過程,最大限度地校正模型失真現象或者錄入信息引起的控制對理想狀態量的誤差偏移,因此預測控制算法也實現了內部閉環優化正向流程。
4 仿真結果
本文仿真軌跡選取雙移線,仿真過程在carsim/Simulink聯合平臺上完成。根據仿真結果,由于變化的車速使得算法控制下的車輛行駛軌跡與參考的對比軌跡之間出現一定的偏差,此誤差數值處于穩定區間,直觀地體現在仿真觀測器上的實際行駛路徑與參考路徑的大致貼合,沒有呈現較大的波動,總體上仍是較好地完成了軌跡跟蹤控制任務。
5 結論
本文首先進行了車輛的數值建模,并設計了MPC橫向控制策略,最后在搭建的carsim/Simulink平臺上對設計的控制器進行仿真驗證。仿真結果表明,文章所設計的MPC控制器可以完成既定的車輛橫向跟蹤控制目標,并且對變化的速度變量具有優良的自適應性能,能在保證車輛穩定的前提下可靠的進行軌跡跟蹤。
參考文獻:
[1] 陳慧巖,陳舒平,龔建偉.智能汽車橫向控制方法研究綜述[J].兵工學報,2017,38(06):1203-1214.
[2] 馮劍,張文杰,倪洪杰,等.輪式移動機器人軌跡跟蹤的PID控制方法[J].信息與控制,2017,46(04):385-393.
[3] 韓偉.基于模糊人工勢場法的智能全向車路徑規劃[J].計算機工程與應用,2018,54(06):105-109.
[4] 姜立標,吳中偉.基于趨近律滑膜控制的智能車輛軌跡跟蹤研究[J].農業機械學報,2018,49(03):381-386.
