新能源汽車(chē)遠(yuǎn)程遙控泊車(chē)上電設(shè)計(jì)
2021-11-23 00:46:17鄭舒懿陳欣蕾陳長(zhǎng)健
時(shí)代汽車(chē) 2021年22期
鄭舒懿 陳欣蕾 陳長(zhǎng)健

摘 要:隨著車(chē)聯(lián)網(wǎng)技術(shù)的迅速發(fā)展,車(chē)與手機(jī)的聯(lián)系越來(lái)越緊密,很多用車(chē)場(chǎng)景都是基于手機(jī)車(chē)聯(lián)網(wǎng)實(shí)現(xiàn)的。對(duì)于手機(jī)能夠控制車(chē)輛的功能范圍需求也越來(lái)越廣泛,其中使用于手機(jī)進(jìn)行遠(yuǎn)程遙控泊車(chē)就是很多用戶(hù)所期待的一個(gè)功能場(chǎng)景,而在車(chē)外利用手機(jī)使車(chē)輛啟動(dòng)是進(jìn)行遠(yuǎn)程遙控泊車(chē)的重要前提。本文針對(duì)現(xiàn)有新能源汽車(chē)在車(chē)位較小或停車(chē)環(huán)境復(fù)雜場(chǎng)景中駕駛員難停車(chē)的問(wèn)題,提出了用戶(hù)在車(chē)外對(duì)車(chē)輛進(jìn)行控制,使車(chē)輛遠(yuǎn)程遙控泊車(chē)上電的設(shè)計(jì)方案,闡述了該方案的設(shè)計(jì)原理及實(shí)現(xiàn)方式。
關(guān)鍵詞:新能源汽車(chē) 遠(yuǎn)程遙控泊車(chē)上電 智能進(jìn)入系統(tǒng)控制器 車(chē)載終端\
Design of Remote Parking Power for New Energy Vehicles
Zheng Shuyi Chen Xinlei Chen Changjian
Abstract:With the rapid development of internet of vehicles technology, the relationship between vehicles and mobile phones is closer and closer. Many vehicle scenarios are based on mobile internet of vehicles. The demand for mobile phone to control the vehicle's function range is becoming more and more extensive, among which the use of mobile phone for remote parking is a functional scenario that many users expect, and the use of mobile phone to start the vehicle outside the car is an important prerequisite for remote parking. In view of the problem that it is difficult to stop in the scene of small parking space or complex parking environment for the driver of the existing new energy vehicle, this paper puts forward a design scheme that the user controls the vehicle outside the vehicle to make the vehicle remotely park and power on, and expounds the design principle and implementation mode of the scheme.
Key words:new energy vehicles, remote parking power on, intelligent access system controller, vehicle terminal
1 引言
遠(yuǎn)程遙控泊車(chē)作為目前汽車(chē)領(lǐng)域中一項(xiàng)新技術(shù)可以實(shí)現(xiàn)在某些場(chǎng)景中控制車(chē)輛泊入或者泊出車(chē)位,基本解決了駕駛員由于車(chē)位較小或者停車(chē)環(huán)境復(fù)雜而導(dǎo)致的停車(chē)難問(wèn)題。在控制車(chē)輛遠(yuǎn)程遙控泊車(chē)之前,需要使車(chē)輛上電后進(jìn)入動(dòng)力準(zhǔn)備狀態(tài)。由于是車(chē)外遠(yuǎn)程上電,對(duì)于上電過(guò)程中的安全性是用戶(hù)會(huì)非常關(guān)注的一個(gè)方面。
目前市面上的大部分電動(dòng)汽車(chē)接收到手機(jī)端發(fā)送的遠(yuǎn)程遙控泊車(chē)指令后,在上電認(rèn)證時(shí)只經(jīng)過(guò)整車(chē)控制器和車(chē)內(nèi)一鍵式啟動(dòng)控制器(以下簡(jiǎn)稱(chēng)PEPS)的一次鑒權(quán)后就可以跳轉(zhuǎn)到動(dòng)力準(zhǔn)備狀態(tài)。僅有一次鑒權(quán),上電的安全性比較低,且在上電前沒(méi)有判斷SOC值、充電線等因素,存在啟動(dòng)失敗及安全隱患。本文提出一種在遠(yuǎn)程遙控泊車(chē)上電過(guò)程中不同控制器之間采用雙重鑒權(quán)及上電前對(duì)SOC值、充電線連接狀態(tài)的判斷的策略,使用戶(hù)在使用手機(jī)遠(yuǎn)程遙控泊車(chē)上電時(shí)的安全性得到一定保障。
2 現(xiàn)有技術(shù)分析
現(xiàn)有遠(yuǎn)程遙控泊車(chē)上電邏輯是由車(chē)載終端、整車(chē)控制器、手機(jī)APP、PEPS控制器及相關(guān)線束完成。
車(chē)載終端接收到手機(jī)APP發(fā)送的遙控泊車(chē)指令后,通過(guò)CAN網(wǎng)絡(luò)發(fā)送給PEPS控制器,PEPS控制器接收到信號(hào)后通過(guò)內(nèi)部邏輯判斷使整車(chē)電源模式由OFF跳轉(zhuǎn)到ON并與整車(chē)控制器進(jìn)行防盜鑒權(quán),通過(guò)鑒權(quán)后,整車(chē)控制器控制繼電器閉合,整車(chē)進(jìn)入動(dòng)力準(zhǔn)備狀態(tài)
該技術(shù)目前的局限在于:
車(chē)載終端接收到遠(yuǎn)程遙控泊車(chē)信號(hào)以后,CAN信號(hào)傳遞的過(guò)程中,只有控制器與整車(chē)控制器之間一次防盜鑒權(quán),安全性較低;
無(wú)上電前SOC值判斷,若電量過(guò)低時(shí)進(jìn)行遠(yuǎn)程遙控泊車(chē),容易出現(xiàn)泊車(chē)進(jìn)行時(shí)車(chē)輛因SOC過(guò)低而熄火無(wú)法啟動(dòng);
無(wú)上電前整車(chē)防盜模式和充電線是否連接判斷,導(dǎo)致進(jìn)行遠(yuǎn)程遙控泊車(chē)時(shí)存在一定安全隱患。
3 系統(tǒng)設(shè)計(jì)
3.1 系統(tǒng)概述
本文介紹的遠(yuǎn)程遙控泊車(chē)上電邏輯涉及的主要有整車(chē)控制器、車(chē)載終端、智能進(jìn)入系統(tǒng)控制器、手機(jī)APP四個(gè)部分。接收到遠(yuǎn)程信號(hào)后,智能進(jìn)入系統(tǒng)控制器判斷實(shí)際車(chē)況后與其他控制器進(jìn)行雙重鑒權(quán),使遠(yuǎn)程遙控泊車(chē)上電過(guò)程更加安全可靠。
3.2 系統(tǒng)架構(gòu)設(shè)計(jì)
遠(yuǎn)程遙控泊車(chē)上電邏輯涉及的主要有整車(chē)控制器、車(chē)載終端、智能進(jìn)入系統(tǒng)控制器、手機(jī)APP四個(gè)部分,具體框圖如圖1所示。
整車(chē)控制器,是整個(gè)汽車(chē)的核心控制部件,相當(dāng)于汽車(chē)的大腦。它采集加速踏板信號(hào)、制動(dòng)踏板信號(hào)及其他部件信號(hào),并做出相應(yīng)判斷后,控制下層的各部件控制器的動(dòng)作,驅(qū)動(dòng)汽車(chē)正常行駛。作為汽車(chē)的指揮管理中心,整車(chē)控制器主要功能包括:驅(qū)動(dòng)力矩控制、制動(dòng)能量的優(yōu)化控制、整車(chē)的能量管理、CAN網(wǎng)絡(luò)的維護(hù)和管理、故障的診斷和處理、車(chē)輛狀態(tài)監(jiān)視等,它起著控制車(chē)輛運(yùn)行的作用。
智能進(jìn)入系統(tǒng)控制器,是核心控制單元。當(dāng)接收到合法的遠(yuǎn)程遙控泊車(chē)上電請(qǐng)求時(shí)控制整車(chē)電源模式由OFF擋跳轉(zhuǎn)到ON擋,支持LIN總線控制ESCL(電子轉(zhuǎn)向柱鎖)解閉鎖。
車(chē)載終端,是接收手機(jī)APP遠(yuǎn)程信號(hào)的控制器,實(shí)現(xiàn)手機(jī)APP與車(chē)輛之間的信息顯示與控制。
手機(jī)APP是用戶(hù)實(shí)現(xiàn)與車(chē)輛進(jìn)行遠(yuǎn)程信息交互并由此來(lái)遠(yuǎn)程控制車(chē)輛的一種途徑。
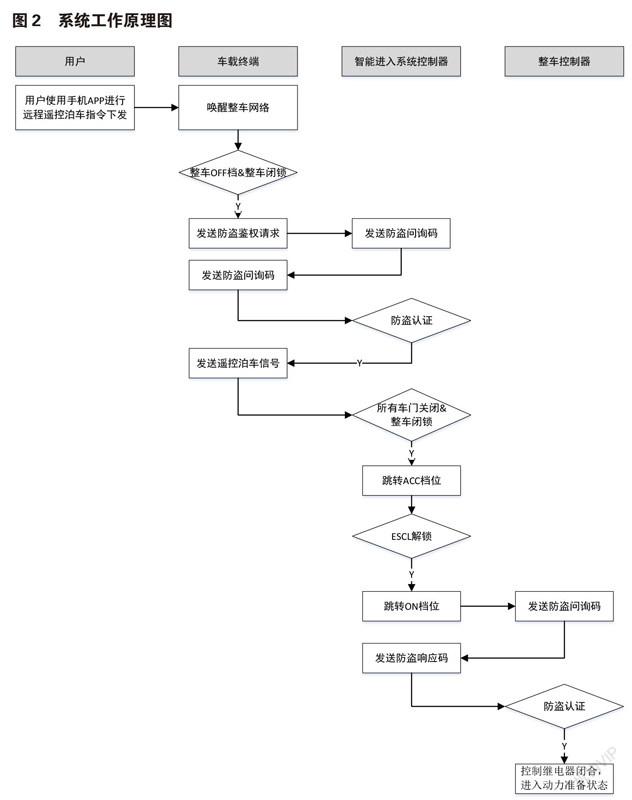
3.3 系統(tǒng)工作原理
本策略中,整車(chē)使用智能進(jìn)入系統(tǒng)控制器替換PEPS控制器與車(chē)身控制模塊,由智能進(jìn)入系統(tǒng)控制器控制整車(chē)上下電策略的執(zhí)行。
1、車(chē)載終端接收到手機(jī)APP遠(yuǎn)程遙控泊車(chē)指令后,喚醒整車(chē)網(wǎng)絡(luò)并判斷整車(chē)上電條件,然后向智能進(jìn)入系統(tǒng)控制器發(fā)送防盜鑒權(quán)請(qǐng)求,智能進(jìn)入系統(tǒng)控制器發(fā)送防盜問(wèn)詢(xún)碼給車(chē)載終端,車(chē)載終端回應(yīng)防盜響應(yīng)碼。
2、鑒權(quán)認(rèn)證通過(guò)后,車(chē)載終端將遠(yuǎn)程遙控泊車(chē)信號(hào)通過(guò)CAN網(wǎng)絡(luò)發(fā)送給智能進(jìn)入系統(tǒng)控制器,智能進(jìn)入系統(tǒng)控制器判斷整車(chē)上電條件符合后,整車(chē)電源模式跳轉(zhuǎn)到ACC檔位,且智能進(jìn)入系統(tǒng)控制器進(jìn)入遙控上電模式,同時(shí)ESCL解鎖,整車(chē)電源模式跳轉(zhuǎn)到ON檔;
3、整車(chē)控制器檢測(cè)到ON檔信號(hào)后向智能進(jìn)入控制器發(fā)送防盜詢(xún)問(wèn)碼,智能進(jìn)入系統(tǒng)控制器回應(yīng)防盜響應(yīng)碼,鑒權(quán)請(qǐng)求認(rèn)證通過(guò)后,整車(chē)控制器控制繼電器閉合,整車(chē)進(jìn)入動(dòng)力準(zhǔn)備狀態(tài)(圖2)。
4 技術(shù)創(chuàng)新點(diǎn)
與市面上現(xiàn)有技術(shù)相比,本文涉及的邏輯方案有以下技術(shù)創(chuàng)新點(diǎn):
1、車(chē)載終端與智能進(jìn)入系統(tǒng)控制器之間增加防盜鑒權(quán)認(rèn)證步驟,實(shí)現(xiàn)遠(yuǎn)程遙控泊車(chē)上電流程雙重鑒權(quán),提高遠(yuǎn)程遙控泊車(chē)上電邏輯的可靠性;
2、遠(yuǎn)程遙控泊車(chē)上電前增加整車(chē)SOC值判斷;
3、遠(yuǎn)程遙控泊車(chē)上電前增加整車(chē)防盜模式及充電線連接判斷。
5 結(jié)束語(yǔ)
通過(guò)增加控制器之間的鑒權(quán)步驟及上電前對(duì)車(chē)輛點(diǎn)亮、充電線連接情況等車(chē)況的判斷,使用戶(hù)在使用遠(yuǎn)程遙控泊車(chē)功能時(shí)更有安全保障,提升用戶(hù)的功能使用體驗(yàn)感。
參考文獻(xiàn):
[1]田磊,趙靜藝.新能源電動(dòng)車(chē)的上下電管理[J].科技風(fēng),2020(29):7-8.
[2]陳躍.汽車(chē)智能網(wǎng)聯(lián)系統(tǒng)中遠(yuǎn)程啟動(dòng)技術(shù)的應(yīng)用研究[J].決策探索(中),2020(03):74.
[3]侯森垚,鄒常豐,趙曦.汽車(chē)遠(yuǎn)程啟動(dòng)及防盜系統(tǒng)安全策略研究[J].交通科技與經(jīng)濟(jì),2017,19(02):54-58.
