二次雷達目標交織特性分析與解決方案探討
2021-11-23 05:16:49李璐
科技創新導報 2021年19期

摘? 要:近年來,因航空事業發展快速,飛行密度增大,二次雷達應答交織概率大幅提升,影響航空運輸安全。但針對二次雷達應答交織國內外系統性研究資料較少,本文從二次雷達應答交織的現象出發,結合理論分析深入尋求交織的本質原因,討論應答信號交織的解碼準則和基本提取方法,推論出兩批交織目標理論上的正確解交織概率,提出提高解交織概率的方法,并在實驗室環境測試得到驗證,本文提出的方法可在二次雷達研制中廣泛推廣應用。
關鍵詞:二次雷達? 交織? 解交織? 交織測試
中圖分類號:TN957.51 文獻標識碼:A 文章編號:1674-098X(2021)07(a)-0007-04
Analysis and Solution of Target Interleaving Characteristics of SSR
LI Lu
(Sichuan Jiuzhou Aerocont Technologies Co., Ltd.,Mianyang, Sichuan Peovince, 621000? china)
Abstract: In recent years, due to the rapid development of aviation industry and the increase of flight density, the interleaving probability of SSR response has increased significantly, which affects the safety of air transportation. However, there are few systematic research data on SSR response interleaving at home and abroad. Starting from the phenomenon of SSR response interleaving, combined with theoretical analysis, this paper deeply seeks the essential reason of interleaving, discusses the decoding criteria and basic extraction methods of response signal interleaving, infers the correct de interleaving probability of two batches of interleaving targets in theory, and puts forward the method to improve the de interleaving probability, the method proposed in this paper can be widely used in the development of SSR.
Key Words: SSR; Interleaving; De interleaving; Interleaving test
二次雷達通過旋轉天線發射定向詢問波束,機載應答機收到詢問時產生相應應答信號[1],二次雷達接收應答信號后解碼上報獲取的飛機身份、屬性、位置以及特殊代碼等監視信息[2],為目標監視和飛行安全提供情報保障。
因近年航空業發展快速,飛行密度加大,二次雷達應答交織概率大幅提升,飛機高密度或編隊飛行時,存在多個相近目標同時應答,二次雷達無法有效分辨,造成目標錯碼或丟失;同時城市化進程加快,雷達陣地周邊環境惡化,存在大量遮擋或反射體,應答信號產生多路徑效應,直射和反射信號同時進入接收,引起回波能量起伏加劇,造成目標錯碼。
1? 應答信號交織概述
1.1 應答信號格式
如圖1所示,為二次應答機常規(A/C模式)應答信號的波形。其中,F1F2為成對的框架脈沖,A、B、C、D共4組12個數據脈沖[3,4]。特殊位置識別脈沖(SPI)位于最后,當地面管制人員要求時會發送,用于進一步身份確認。
1.2 應答信號交織
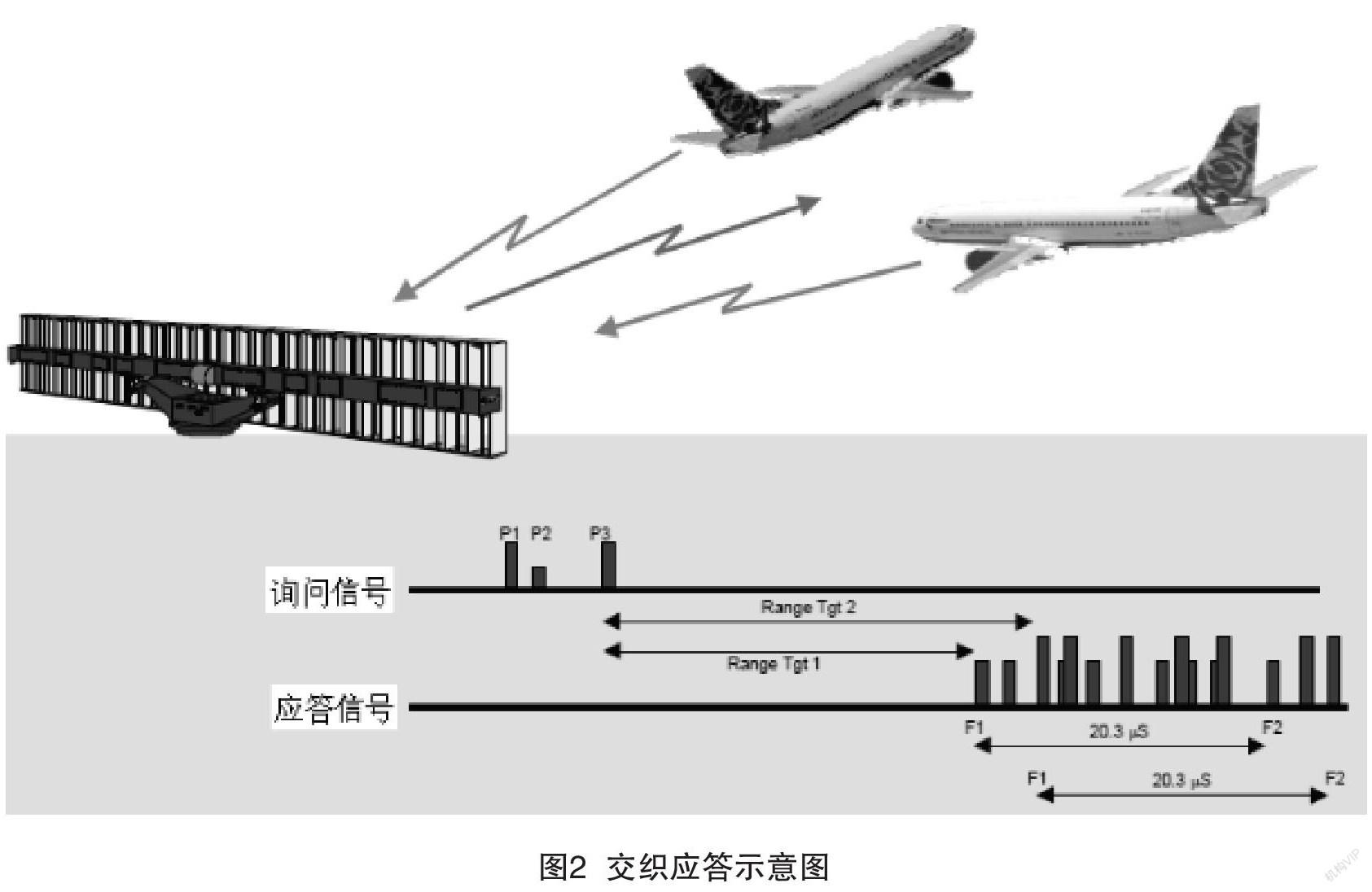
應答信號交織由異步干擾和同步竄擾引起。異步干擾接收到其他詢問機的詢問而觸發應答信號;同步竄擾指因反射等多路徑造成同時收到多個應答信號,應答脈沖相互重疊[5]。當應答信號間隔小于20.3μs時會交疊,等效飛機間隔3.1km時應答脈沖會重疊,如圖2所示。歸結主要有以下3種情況[3,6]。
第一,交疊應答,因多目標應答脈沖組相互重疊,且重疊的應答脈沖相互占據。
第二,交錯應答,因多目標應答脈沖組相互重疊,但重疊的應答脈沖相互占據。
第三,幻影應答,A模式應答且存在特殊位置識別脈沖時,由C2-SPI形成虛假應答框架和脈沖序列。
目標交織應答本質上是多個應答信號同時到達相互重疊,此時能否正確譯碼與應答脈沖重疊部分的寬度和幅度差有關,一定條件下可分辨可正確解碼,有時無法正確提取目標框架或代碼,易造成目標錯碼或丟失。
2? 交織應答信號分析
2.1 交織信號特征分析
2.1.1 信號強度
應答機標準功率差±3dB,信號空間傳輸衰減一致,交織信號強度差不大。
2.1.2 載波相移
二次雷達天線以固定轉速、固定寬度波束、固定詢問周期工作,由此在波束駐留期間內,兩個應答目標相對運動會給應答信號帶來一定的相位差;同時應答信號載波頻率允許±3MHz的偏差,兩個應答信號的頻差也會帶來一定的相移。
2.1.3 交疊幅度變化
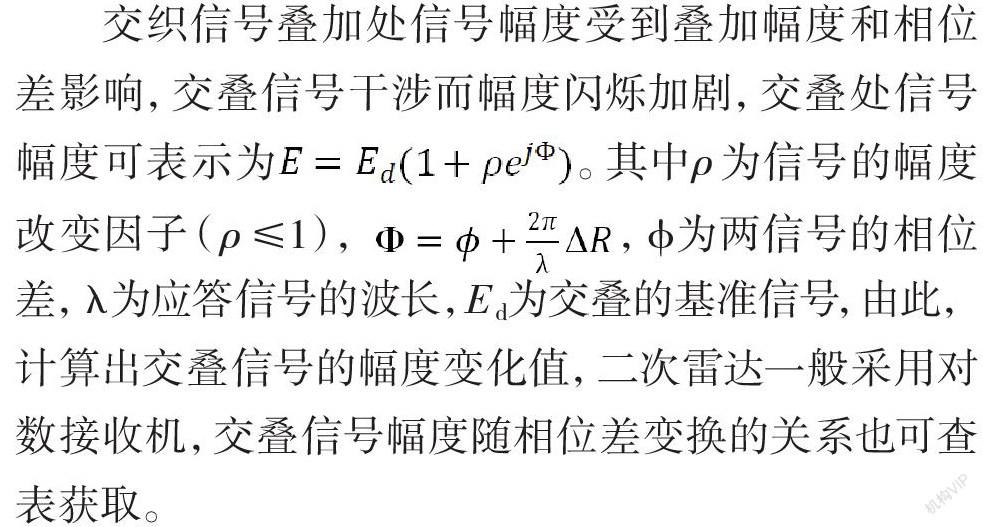
交織信號疊加處信號幅度受到疊加幅度和相位差影響,交疊信號干涉而幅度閃爍加劇,交疊處信號幅度可表示為。其中ρ為信號的幅度改變因子(ρ≤1),,φ為兩信號的相位差,λ為應答信號的波長,Ed為交疊的基準信號,由此,計算出交疊信號的幅度變化值,二次雷達一般采用對數接收機,交疊信號幅度隨相位差變換的關系也可查表獲取。
2.1.4 綜合影響
ICAO附件10第四卷第3.1.1.6.4節規定“一個脈沖的脈沖振幅變化相對于一應答列中任何其他脈沖,不得超過1分貝”[7]。即當兩應答信號幅度差為6dB時,交疊處波動在1dB內的概率只有約31%,由特性可知,交織信號頻差和目標相對運動產生的載波相移使交疊處信號幅度閃爍加劇,較難確定信號幅度和前沿,一定條件下致使F1F2框架檢測失敗,故而不能正確提取交織目標應答碼位。
2.2 常規解交織譯碼準則
根據國際民航組織的ICAO附件10第四卷規定,應答機應答信號所允許的脈沖位置偏差為±0.1μs;但實際脈沖位置隨著接收機噪聲、應答機不規范、多路徑等因素抖動[8]。同時譯碼器的時鐘頻率和應答脈沖的時間偏差應匹配,以二次雷達譯碼時鐘通常選定為20MHz頻率為例[9],對于標準的1.45μs間隔脈沖需進行29等分量化。
在實際設計中,譯碼電路對處理后和視頻(PSV)進行反窄處理后,依據視頻前沿(ALE)進行框架(F1F2)檢測,再提取碼位信號。PSV反窄寬度常規為0.3μs,應答碼位譯碼允許誤差范圍為±0.15μs,當交疊脈沖的前沿不能被分開始時,就必須利用后沿或前沿時間所提供的數據來進行PSV前沿探測,從而正確提取應答目標框架和碼位信息。當干擾信號形成長脈沖或連續波,會形成大量的額外前沿(XLE),從而產生大量的虛假應答信號,需控制XLE數量。
2.3 兩批目標交織理論概率
基于以上譯碼框架和脈沖提取準則,當應答信號脈沖相對時間差為X(變化范圍0~1.45)μs,脈碼交疊隨相對時間差變化,如圖3所示,不用時間差的理論譯碼結果見表1[10]。
由此可見,兩批目標交織應答均能正確譯碼區間為的0.35~1.1μs,正確譯碼概率為51.7%;而應答機應答概率一般為90%,目標遠距離應答信號強度還會降低,解兩交織應答能力隨之降低。
3? 提高解目標交織的方法
3.1 譯碼處理
針對C2-SPI幻影應答,可以強化SPI與C2關系檢測,多幀關聯驗證抑制虛假框架;而對于交織和交疊應答,可在常規前沿檢測基礎上,進行前后沿正反向關聯檢測,提高目標分辨代碼正確提取概率,并標記交織后續數據處理使用;當在方位上部分交織時,可以利用詢問波束前后邊緣非交織應答進行代碼提取,且標記為高置信度,點跡凝聚處理時根據算法加大高置信度代碼權重,從而正確提取目標代碼。
3.2 航跡處理
航跡處理軟件對被標記為交織已跟蹤的航跡嘗試代碼確認和糾錯,根據歷史航跡代碼隊列利用非交織應答代碼糾正交織代碼;同時利用反射目標檢測,去除因反射形成虛假目標;當航跡丟點時,采用平滑外推的方法進行補點,代碼和高度適度保持,極大地提高解交織能力。
3.3 與一次雷達聯合處理
一次/二次雷達合裝時,因一次雷達體制與二次雷達差異,一次雷達分辨力更高,可有效分辨二次雷達判定為交織的多目標;由此,二次雷達可引接一次目標報告獲取一次提供交織目標機架數量、航向、航速等屬性,建立區域補充跟蹤運動模型,精細化匹配二次點航跡,動態控制相關門限,可以減少錯關聯,同樣可以采用航跡平滑濾波糾正二次代碼和高度錯誤,可適度補點,從而提高一次/二次雷達綜合探測能力。
4? 試驗驗證
在實驗室利用某二次雷達開展解四重交織驗證,選定儀器為1臺應答模擬器和3套“1400A+1402-I”,通過功分器與設備和通道相連,設備差通道和控制通道接吸收負載。各模擬目標模擬在300km以外順序遞增,4個目標兩兩交疊后,脈沖幅度波動較大,通過使用本文的二次雷達譯碼、點航跡解交織方法處理后,能正確獲取多個目標代碼。調節四重交織目標的和通道信號強度,其余參數不變后測試結果見表2。
在實驗室設定四重目標交織距離差情況下,當兩兩交疊目標信號強度差大于4dB時,均能夠正確譯碼;但在信號強度在2~3dB時,能譯出4個目標,但存在錯碼;在信號強度差小于2dB時,出現目標丟點或錯碼。
5? 結語
本文列舉了二次雷達因陣地影響或密集飛行造成目標交織應答現象,分析了交織應答造成目標丟失或錯碼的原因,給出了應答信號交織的譯碼準則,解算兩批目標解交織的理論概率,提出了提高目標結解交織能力的方法,并通過實驗室環境對四重結交織進行驗證,可泛應用于二次雷達設備研制。
參考文獻
[1] 李牧.探析二次監視雷達目標高度跳變現象[J].中國新通信,2018,20(2):209-210.
[2] 李璐.某型空管二次雷達顯示軟件設計與實現[D].成都:電子科技大學,2017.
[3] MH/T 4010-2016 空中交通管制空管二次雷達設備技術規范[S].中國民用航空總局,2016.
[4] 王娜娜.機載S模式應答機的信號處理系統設計[D].西安:西安電子科技大學,2018.
[5] 陳曉偉.二次雷達干擾現象和解決方案分析[J].無線互聯科技,2019,16(21):1-2.
[6] 王微.西寧機場THALES二次雷達干擾及假目標的抑制實現[D].蘭州:蘭州大學,2018.
[7] Annex 10 to the convention on International Civil Aviation Aeronautional,Telecommunications Volume IV-Surveillance Radar and Collision Avoidance Systems[S].The convention on International Civil Aviation,2007.
[8] 蔣鑫,許杰.基于二次雷達的常規模式應答四重交織譯碼技術的實現[J].中國科技投資,2018(20):294.
[9] 張尉.二次雷達原理[M].北京:國防工業出版社,2007.
[10] 張中南,李海軍,向珍.一種基于二次監視雷達應答信號的海雜波抑制方法[J].火控雷達技術,2015,44(3):10-14.
