基于CVAE的超高速碰撞碎片云運動過程的快速預測技術
2021-11-19 07:24:58李毅任磊生
實驗流體力學 2021年5期
周 浩,李毅,*,張 浩,陳 鴻,任磊生
1.中國空氣動力研究與發展中心 超高速空氣動力研究所,四川 綿陽 621000 2.中國工程物理研究院 計算機應用研究所,四川 綿陽 621000
0 引言
人類航天活動形成了大量空間碎片,這些空間碎片速度能夠達到幾公里每秒甚至十幾公里每秒[1],嚴重影響航天器安全,因此需要采取必要防護措施。目前主流的防護技術是Whipple 屏[2]及其改進防護屏技術,該技術是在航天器艙壁前一定距離處設置一防護屏。在空間碎片超高速撞擊防護屏產生的高溫高壓下,彈靶材料撞擊區呈流體狀態,破碎后形成擴張的碎片云,使入射彈丸動能被高度分散并部分耗散,從而實現對航天器的有效保護。由于碎片云的形狀、速度和質量分布對其后續侵徹艙壁的過程具有重要影響,在很大程度上決定了防護屏的防護能力,因此,快速預測彈丸超高速撞擊防護屏產生碎片云的質量分布及其隨時間變化規律具有重要意義。
在彈道靶上開展地面超高速撞擊試驗是獲取不同防護屏設計方案中碎片云分布特征的最有效方法,但試驗存在成本、效率、測量難度以及參數范圍限制等一系列問題。數值模擬具有成本低、獲取數據豐富的優點,目前已成為研究碎片云的重要手段,但數值模擬同樣存在效率低的問題,難以完全滿足空間碎片防護分析設計的需求。為此,學者們提出了很多工程模型來快速預測碎片云特性。Swift 等[3]將碎片云簡化為質量均勻分布的球形;Sch?fer[4]將碎片云分為3 個部分(一個質量均勻分布的橢球殼、一個質量均勻分布且內切于橢球殼的球殼和一個位于碎片云前端的大碎片),如圖1(a)所示。此外,還有一些更加復雜的改進方案[5-7],如Huang等[6]從碎片云中碎片特征(質量、速度和空間角度等)的統計規律出發,采用蒙特卡羅抽樣方法,構建了一個碎片云工程模型,如圖1(b)所示。這些工程模型雖然計算效率高,但存在過度簡化問題,碎片云形態比較粗糙,而且一般忽略了反濺碎片云。

圖1 典型超高速碰撞碎片云工程模型Fig.1 Typical HVI debris engineering model
當前,基于大量試驗和模擬數據的深度學習建模技術被廣泛應用于航空航天與國民經濟的各個方面,在工程預測的精度或效率方面明顯優于傳統方法。在空間碎片防護領域,深度學習建模技術也開始在鋁板防護設計優化[8]、彈丸穿靶后在平板上形成的入射孔徑的大小預測[9]、彈丸在平板上成坑、穿孔等不同損傷模式預測[10]等方面得到初步應用。CVAE[11-12]是一種經典的應用于圖像生成的深度學習模型,其基本功能是根據給定的標簽生成樣本,現已成功應用于湍流模擬[13]、外形阻力系數優化[14]、蛋白質折疊模擬[15]、分子結構設計[16]等領域。預測給定條件(如彈丸速度、彈丸大小、防護屏厚度、觀測時間等)下的碎片云二維質量分布,其過程與CVAE 模型的作用非常類似,且碎片云二維質量分布剛好可以用一張灰度圖來表示。此外,深度學習需要大量訓練數據,而中國空氣動力研究與發展中心依托大型彈道靶設備,積累了大量超高速撞擊試驗數據,且初步建設了試驗大數據系統。因此,本研究團隊對采用CVAE 模型從大量數據中提取規律進行了初步嘗試。由于大量試驗數據的格式不統一,且某些數據信息不全(如受限于試驗測試能力,無法定量得到碎片云中的質量分布),因此,在對代碼進行必要驗證的前提下,暫時采用數值模擬方法生成大量格式統一的數據進行訓練,以初步驗證方法的可行性。本研究團隊前期模擬了大量彈丸超高速碰撞典型航天器部件的問題,分析了彈丸速度、碰撞角度以及撞擊點偏差3 個變量對固定時刻碎片云質量分布的影響。在數值模擬結果中,利用碎片識別程序提取出碎片云中所有碎片的質量和位置信息,從而得到碎片云二維質量分布,并將其作為訓練樣本。在此基礎上構建了CVAE 深度學習模型[17],用于預測固定時刻的碎片云質量分布,結果表明:預測精度遠高于傳統的工程模型,而且計算效率遠高于數值模擬。
本文在前期研究的基礎上,進行了以下改進:1)考慮了時間因素,從而可以預測碎片云的發展變化過程,這也就隱式地給出了碎片云中部分速度信息。2)訓練樣本直接從每個SPH 粒子得到,而不是從碎片識別數據(質量和位置)得到,大幅提高了輸入數據的精度。因為有些大碎片尺寸超過了背景網格,將此碎片質量全部計入其質心位置所在網格與事實不符,會導致樣本精度不高。此外,由于碎片質量差別過大,前期研究中還剔除了尺寸最大的碎片,導致碎片云中沒有防護屏的位置信息。3)由于彈丸速度差別較大,因此碎片云的分布區域差別也較大。為了減少圖像中的空白區域,增加圖像中的信息量,前期研究中對碎片云按速度進行了縮放。人為縮放后更加容易訓練,但是導致每個網格的預測結果缺少統一的物理意義。此外,縮放后再還原到物理空間實際上就隱含了碎片云實際范圍正比于速度的物理意義。人為縮放相當于只考慮碎片云的形狀,而忽略碎片云的實際大小。本文在一個足夠大的固定空間中統計碎片云質量分布,讓模型自主學習碎片云的所有運動規律。4)精簡網絡結構,采用全局平均池化技術代替部分全連接層,將參數總量由近2000 萬降至500 萬以下。
1 數據與模型
1.1 數據集
考慮球形鋁彈丸超高速正撞擊鋁防護屏過程中的碎片云發展過程。研究影響碎片云形狀的4 個控制條件,即入射速度(v)、防護屏厚度(d)、彈丸半徑(r)以及觀測時間(t)。輸入數據由PTS 軟件[18]批量計算,采用的數值方法為光滑粒子流體動力學(SPH)方法。以(最小值、間隔、最大值)表示變量取值范圍,則入射速度范圍為(3.00 km/s、1.00 km/s、8.00 km/s),防護屏厚度范圍是(1.000 mm、1.000 mm、4.000 mm),彈丸半徑范圍是(2.00 mm、1.00 mm、8.00 mm),觀測時間范圍是(1.0 μs、1.0 μs、12.0 μs)。以2016 個數據作為訓練集,在其中隨機抽取1%作為驗證集。
典型的超高速碰撞碎片云發展過程的試驗結果如圖2 和3所示[19]。在圖2 中,圓柱鋅彈丸的半徑為1.99 mm,長度為14.15 mm,入射速度為4.97 km/s,鋅板厚度為0.965 mm,觀測時間為10.5 μs。在圖3 中,圓柱銅彈丸半徑為5.59 mm,長度為3.45 mm,入射速度為5.55 km/s,防護屏材料為鋁,厚度為2.870 mm,觀測時間為6.4 μs。圖2 和3 中同時也給出了對應時刻的PTS 軟件模擬結果。圖4 給出了中國空氣動力研究與發展中心測試得到的典型碎片云序列陰影圖像以及PTS 軟件模擬結果[20]。其中,鋁彈丸的半徑為3.00 mm,入射速度為8.31 km/s;防護屏材料為鋁,厚度為2.000 mm。可以看到,PTS 軟件模擬的碎片云輪廓與試驗基本一致。因此,本文暫采用PTS 軟件模擬得到的碎片云質量分布作為訓練集。

圖2 鋅彈丸超高速撞擊鋅板Fig.2 Zinc projectile impact Zinc plate

圖3 銅彈丸超高速撞擊鋁板Fig.3 Copper projectile impact aluminum plate

圖4 典型超高速碰撞碎片云發展過程試驗(左)與SPH 數值模擬(右)結果對比Fig.4 Comparison of experiment and SPH simulation for a typical HVI impact
忽略反濺碎片云后部質量較低的區域,僅考慮x軸范圍為–4~10 cm、y軸范圍為–7~7 cm 的方形區域(以彈丸入射位置為坐標原點)。將該區域劃分為100×100 的網格,統計每個網格中的總質量,以這10000 個質量數據表征碎片云的質量分布。由于每個網格中質量數據差別很大,對其取對數,并以全局最小和最大網格質量為標準進行歸一化。網絡的輸出層采用sigmoid 激活函數,因此模型預測結果是歸一化的,參考同樣的全局最小和最大網格質量可將其還原為真實質量。
1.2 CVAE 模型構建
根據CVAE 基本原理,本文構建了如圖5所示的碎片云生成模型。在編碼器中,將碎片云質量分布數據及其標簽(彈丸速度、板厚、彈丸半徑和時間)采用Concatenate 層連接在起來,形成一個100×104 的矩陣,其中最后4 列為控制條件;然后通過一系列卷積層(Filters = 1、16、32、64、128、256)提取不同層次的圖像特征;使用全局平均池化技術降維,并用兩個全連接網絡生成樣本的均值和方差,最后高斯抽樣得到隱藏層數據。在解碼層,同樣采用Concatenate 層將隱藏層輸入和隱藏層標簽連接起來,采用全連接層升維,最后采用一系列反卷積層(Filters = 512、256、128、96、1)得到原始圖片。損失函數由兩部分組成:第一部分描述生成圖像與訓練樣本的相似度,用交叉熵表示;第二部分描述隱藏空間的分布與標準正態分布的相似度,用KL散度表示。

圖5 CVAE 模型Fig.5 Structure of the CVAE model
CVAE 模型實現采用Keras 函數庫,后臺使用TensorFlow 深度學習框架執行模型訓練。模型優化使用Rmsprop 算法,參數為默認參數。訓練過程共執行1000 個Epochs,訓練集誤差與驗證集誤差曲線如圖6所示。

圖6 CVAE 模型訓練過程Fig.6 Training of the CVAE model
2 模型評估
2.1 模型還原能力
考察模型復現訓練集數據的能力。取彈丸速度8.00 km/s、半徑2.00 mm,板厚4.000 mm。此時,彈丸較小、板較厚,彈丸破碎比較嚴重。圖7 比較了在此參數下的數值模擬和CVAE 模型預測的碎片云發展情況,其中上為預測結果,下為數值模擬結果。
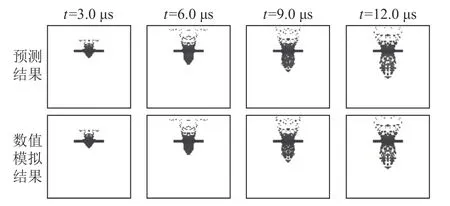
圖7 碎片云發展過程的CVAE 模型預測與數值模擬結果對比(v =8.00 km/s,d = 4.000 mm,r = 2.00 mm)Fig.7 Comparison of the CVAE model prediction and numerical simulation of the evolution of debris(v = 8.00 km/s,d = 4.000 mm,r =2.00 mm)
取彈丸速度為8.00 km/s、半徑為8.00 mm,板厚為1.000 mm。此時彈丸較大、板較薄,彈丸破碎不嚴重,形成了一個中心大碎片。數值模擬和CVAE 模型預測對比如圖8所示。

圖8 碎片云發展過程的CVAE 模型預測與數值模擬結果對比(v=8.00 km/s,d = 1.000 mm,r= 8.00 mm)Fig.8 Comparison of the CVAE model prediction and numerical simulation of the evolution of debris(v = 8 km/s,d = 1 mm,r = 8 mm)
從圖7 和8 可以看到,深度學習模型預測的碎片云質量分布圖像比較逼真,精度遠高于傳統工程模型。假設每個碎片的速度變化不大,則碎片云的外形尺寸應大致正比于彈丸速度和觀測時間。這一結論與圖7 和8 定性相符,說明本文CVAE 模型能夠自主學習到這一基本結論。
為了定量描述模型的精度,需要定義每個網格內的相對誤差。很多網格內的質量為0,而所有輸入數據中防護屏內部網格質量是常數,可以選為基準。定義每個網格質量相對百分比誤差和總體平均誤差分別為


圖9 訓練集中2 016 個數據的平均誤差Fig.9 Average error of 2 016 data on the training set
2.2 模型內插能力
取板厚1.000 mm、彈丸半徑8.00 mm、觀測時間12.0 μs,考察模型在入射速度6.00~7.00 km/s 之間的插值能力,如圖10所示。可以看到,插值結果連續且穩定。碎片云長度隨著速度增大而增大,與事實吻合。

圖10 模型在速度上的內插能力(d = 1.000 mm,r = 8.00 mm,t=12.0 μs)Fig.10 Interpolation capability of the model at the velocity direction(d = 1.000 mm,r = 8.00 mm, t = 12.0 μs)
為了定量考察模型的內插能力,取速度范圍(3.50 km/s、2.00 km/s、7.50 km/s)、防護屏厚度范圍(1.500 mm、1.000 mm、3.500 mm)、彈丸半徑范圍(3.50 mm、2.00 mm、7.50 mm)、觀測時間范圍(1.5 μs、3.0 μs、7.5 μs)內的81 個數據作為測試集。誤差在0.6%以內,如圖11所示。由于時間是影響平均誤差最大因素,而測試集的最大時間僅到7.5 μs,導致測試集誤差反而略小于訓練集。

圖11 測試集中81 個數據的平均誤差Fig.11 Average error of 81 data on the testing set
2.3 模型外插能力
為了考察模型在訓練參數范圍以外的泛化能力,取彈丸速度8.00~9.00 km/s,板厚1.000 mm,彈丸半徑8.00 mm,觀測時間6.0 μs。預測結果如圖12所示,當速度大于8.00 km/s 時,碎片云長度并未隨著速度的增大而增大,可以看出,本模型在外推方面具有一定局限性。

圖12 模型在速度上的外插能力Fig.12 Extrapolation capability of the model at the velocity direction
2.4 模型訓練與預測效率
在NVIDIA K6000 GPU 卡上訓練1000 個Epochs大約需要14 h。加載已經訓練好的模型后,在i7-6700 CPU、內存8 G 的臺式機上生成1 個碎片云圖像的平均時間小于7 ms。
2.5 模型局限性
本文目前僅考慮了碎片云二維質量分布,進一步提高訓練效率后可以推廣到三維。為了提高訓練效率,本模型僅考慮了鋁材料和正碰撞,實用性還有待提高。下一步,可以將彈丸和防護屏的力學性能參數(如材料密度、聲速、剪切模量以及屈服強度等)以及彈丸著靶姿態考慮進去。本模型在外推方面還具有局限性,需要對本文模型的結構進行改進。
3 結論
本文基于深度學習中的CVAE 模型構建了一個預測超高速碰撞碎片云運動過程的深度學習模型,考慮了彈丸速度和半徑、防護屏厚度以及觀測時間這4 個因素,研究結果表明:
1)本文模型能夠自主學習到碎片云在固定空間中的運動規律。
2)訓練參數范圍內,預測結果具有較高精度,平均質量誤差小于0.6%,遠高于傳統工程模型。生成一個100×100 網格的碎片云質量分布的平均時間小于7 ms。
3)本文模型在訓練參數以外的泛化能力具有一定局限性,需要對本文模型的結構進行改進。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年2期)2019-08-23 08:12:08
產品可靠性報告(2017年7期)2017-09-05 09:49:12
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車觀察(2016年3期)2016-02-28 13:16:26
核科學與工程(2015年4期)2015-09-26 11:59:03
