基于特征建模的模型恢復抗飽和控制*
2021-11-17 00:53:26郭瑞科
航天控制 2021年3期
郭瑞科 胡 軍
北京控制工程研究所,北京 100190
0 引言
工程實踐中,控制器往往通過執行機構驅動被控對象,而執行機構自身的物理或者能量約束決定了其輸出存在限制,如果控制器給出的控制指令超出了該限制,會導致控制器的輸出和被控對象的輸入不一致,也就是存在控制輸入飽和約束。從執行機構角度看,就是執行器存在飽和非線性約束,當控制系統發生執行器飽和時,可能會導致控制動態性能變差,甚至閉環系統不穩定。通過設計抗飽和補償器恢復閉環系統控制性能和閉環系統穩定性,是一種行之有效的抗飽和控制方法[1]。
常見的抗飽和控制方法有直接線性抗飽和(Direct Linear Anti-Windup, DLAW)和模型恢復抗飽和(Model Recovery Anti-Windup, MRAW)[2]。DLAW方法通過求解線性矩陣不等式來設計抗飽和補償器以保證一定的控制性能和閉環系統穩定性,往往會轉化為規模較大的線性矩陣不等式,計算量大,設計較復雜。MRAW方法中抗飽和補償器使用與被控對象相同的模型,并且補償器的求解不依賴于控制器,設計簡單,有較大的設計自由度[3]。
目前基于MRAW方法的抗飽和設計研究主要針對連續對象,研究離散系統的較少[4-8]。Zaccarian等針對開放水道控制系統中調節水流的閘門存在飽和約束的臨界穩定系統,分別考慮了控制器和被控對象在連續和離散時間情況下的抗飽和設計問題,給出了臨界飽和系統的MRAW抗飽和補償器設計算法[9]。Ramos等研究了重復控制中的模型恢復抗飽和問題,設計了不受控制器影響的簡單低階抗飽和補償策略,給出了基于最優控制的抗飽和增益求解線性矩陣不等式條件[10]。譚翠蘭等針對并網逆變器控制中容易出現積分飽和的現象,設計了分別補償控制量和輸出反饋量的離散MRAW抗飽和補償器[11]。劉田禾等在建立高超聲速飛行器姿態控制切換系統模型的基礎上,提出抗飽和切換控制方法,通過求解一系列LMI來設計靜態抗飽和補償器[12],但求解數量眾多的LMI會增加計算負擔。類似的,杜立夫等人針對高超聲速飛行器縱向模型,設計了基于魯棒控制的抗飽和補償器,也存在求解復雜LMI的問題[13]。韓少君等針對火星飛機操縱機構存在控制能力受限問題,提出基于擴張狀態觀測器的符合抗飽和策略,這種設計方法會增加控制器設計的復雜度[14]。前述基于MRAW抗飽和設計都是針對低階線性離散系統設計,鮮有涉及非線性系統或者高階被控對象,即使針對部分此類對象設計MRAW抗飽和補償器,也會由于補償器與被控對象使用相同的動態,有較大的設計復雜度和難度。
吳宏鑫和胡軍提出了根據對象動力學特性、環境特征和控制性能要求相結合的特征建模思想,用簡單低階控制器實現滿足控制性能指標的目標。針對一類復雜的高階對象或者非線性系統,考慮位置保持或者跟蹤的控制要求,特征模型可以用二階或者一階時變差分方程描述[15]。基于特征建模的黃金分割控制在滿足增益約束條件下,保證了二階差分特征模型參數未知情況下的反饋穩定性問題,解決了一般自適應控制在啟動和過渡階段參數未收斂所遇到的控制難點,設計簡單,參數魯棒性好[16]。但基于特征模型的黃金分割控制器所針對的對象模型沒有考慮執行器存在飽和的情況。當不考慮執行器飽和現象,常規設計的控制器在執行器發生飽和時將會導致控制性能變差或者閉環系統不穩定。
本文提出將基于特征建模的黃金分割控制和MRAW抗飽和策略相結合的抗飽和控制方法。針對傳統MRAW抗飽和方法難以處理高階對象或者非線性對象的問題,利用二階差分特征模型的簡潔形式,以及具有在同樣控制輸入作用下,對象特征模型和實際對象在輸出上是等價的、在穩定情況下輸出是相等的等優點,在抗飽和設計中用二階特征模型取代原被控對象,求解抗飽和補償器中的反饋增益。將傳統的離散線性MRAW抗飽和策略推廣到一類高階對象和非線性系統中,擴展了其應用范圍,簡化了這類系統抗飽和補償器設計,可以更好地應用于工程實踐。
1 問題描述
1.1 系統定義
根據特征建模理論,工程中常見的線性定常高階對象式(1),以及飛行器姿態動力學方程中常用到的一類相對階為2的單輸入單輸出最小相位非線性系統式(2),在滿足一定采樣周期的條件下,當要實現位置保持或位置跟蹤控制時,其特征模型可以用一個二階時變差分方程式(3)描述。
(1)
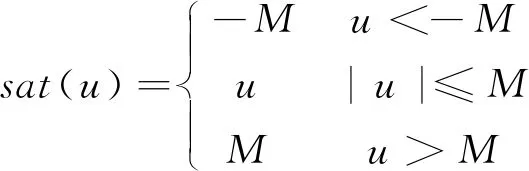
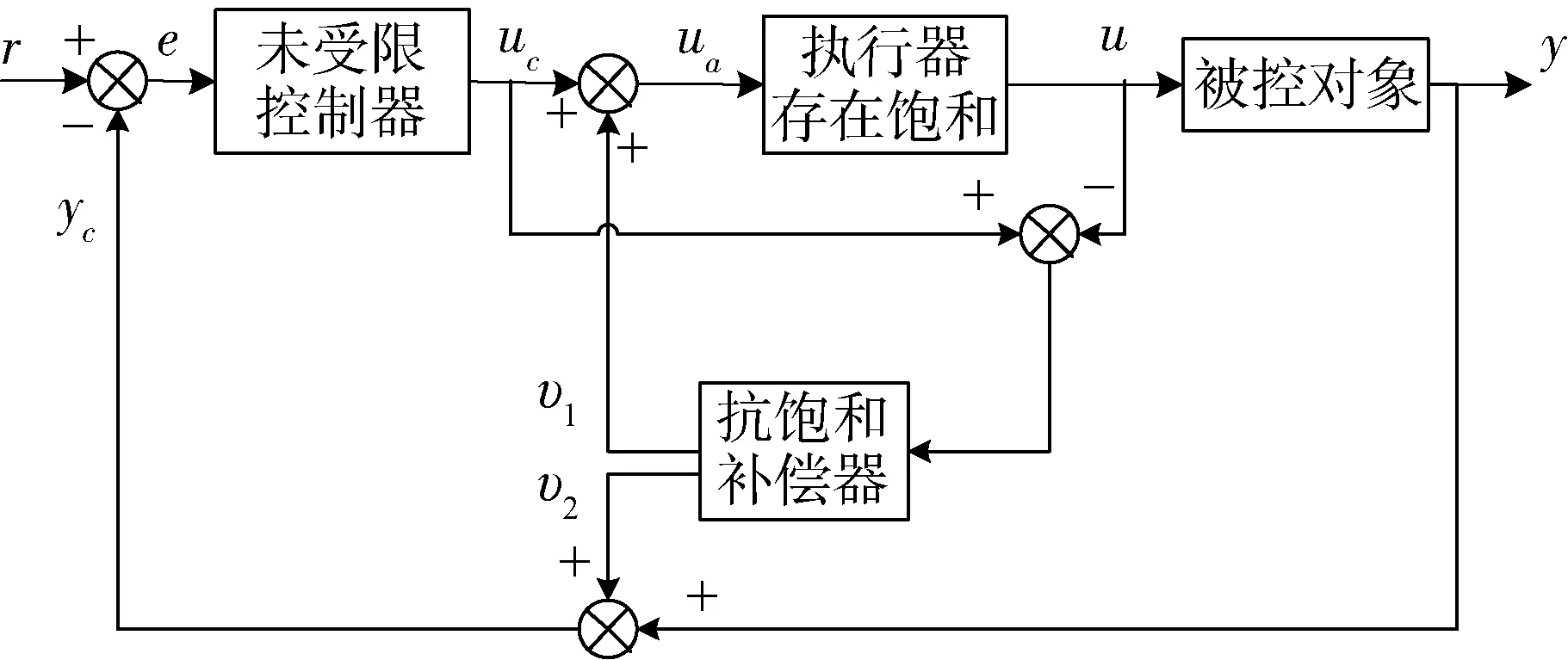
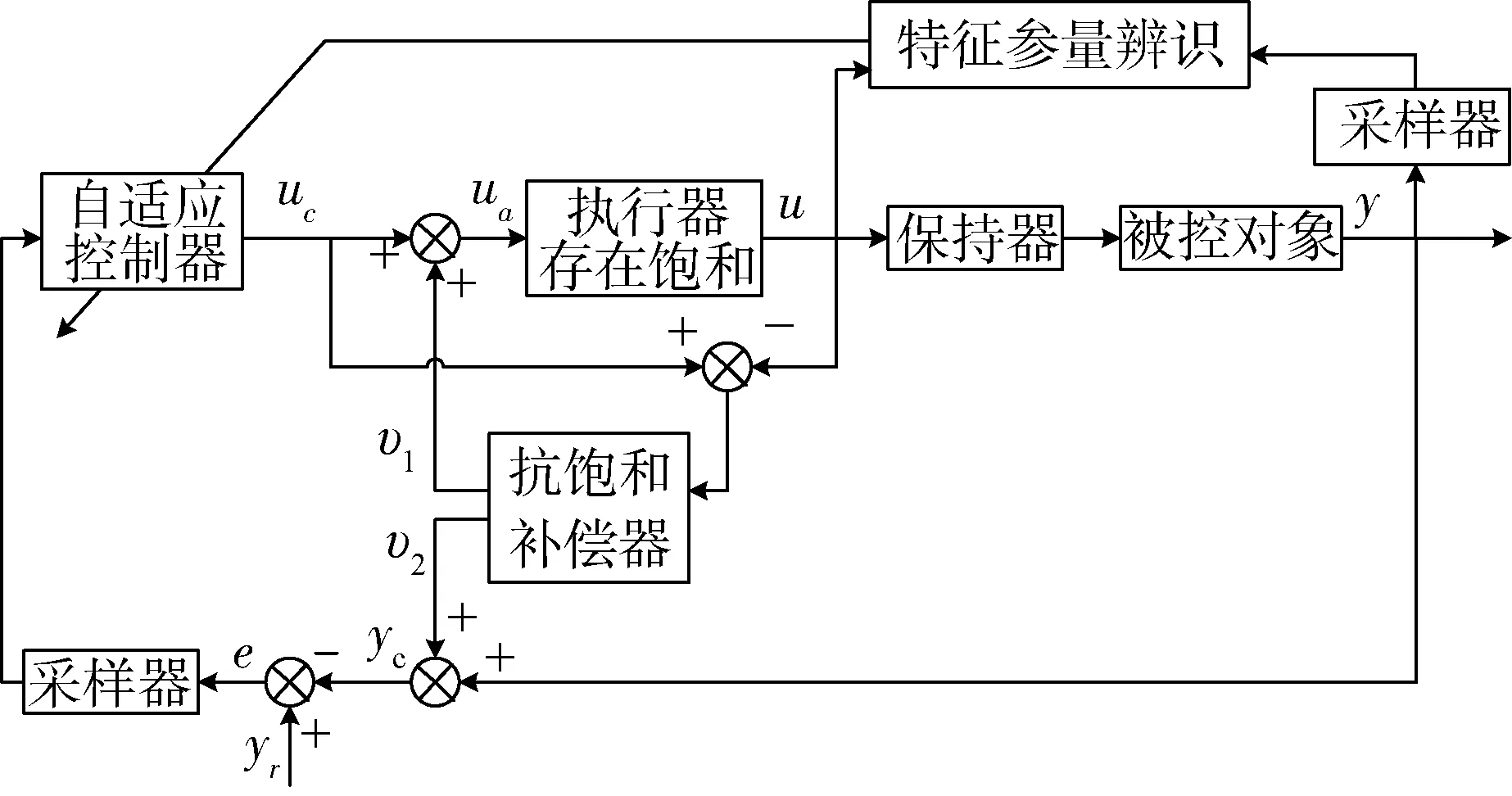
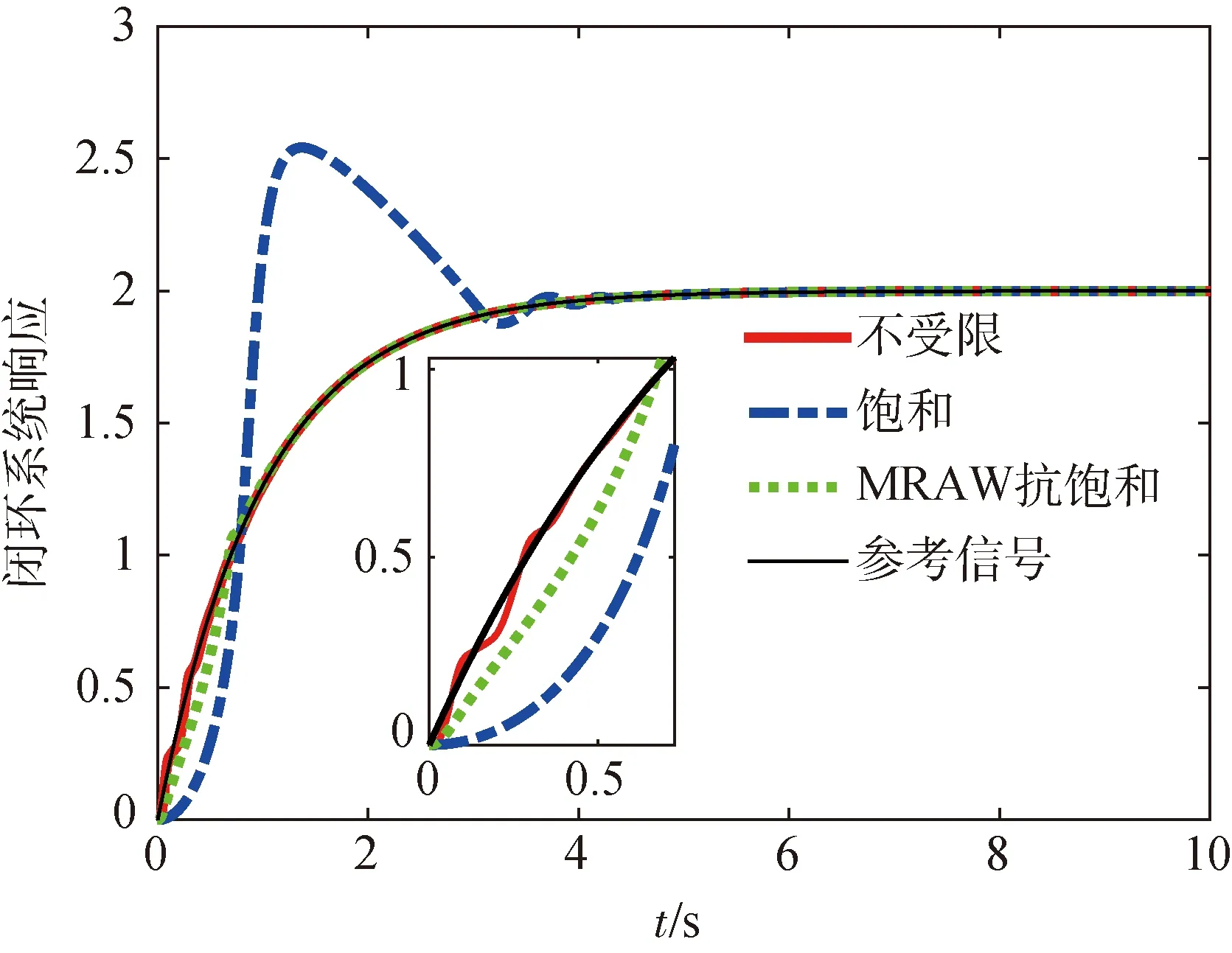
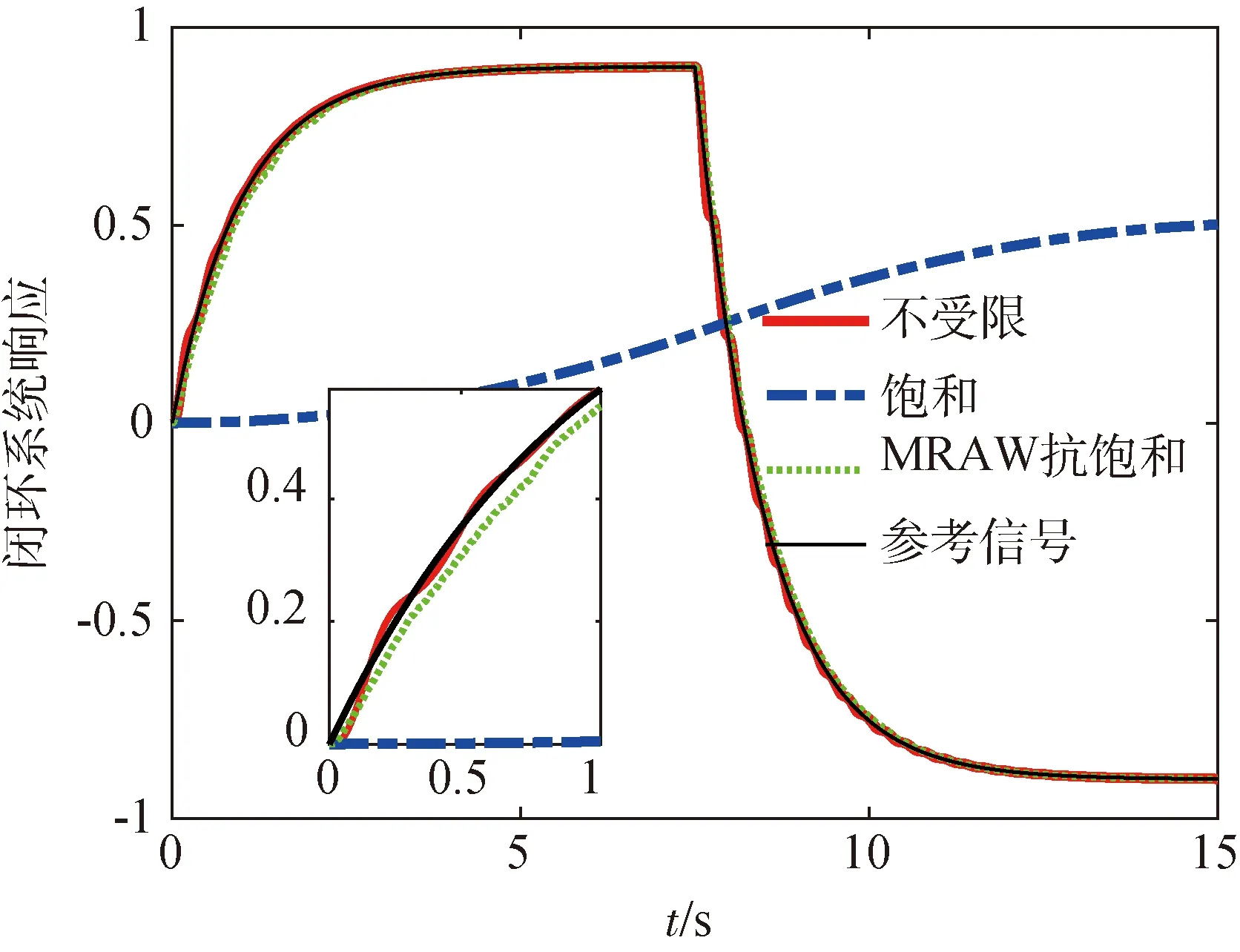
其中ai(i=0,1,…,n-1),bj(j=0,1,…,m)是定常的系統參數,m,n(m (2) 其中,x=[x1,x2]T∈R2,z∈Rm是系統的狀態變量,并且x和z分別對應系統的外動態和內動態;u∈R是系統的控制輸入,y∈R是系統的量測輸出;a(x,z),b(x,z)和f0(x,z)均為系統的不確知非線性函數。 y(k+1)=f1(k)y(k)+f2(k)y(k-1)+g0(k)u(k) (3) 其中,y(k+1)為特征模型輸出特征變量;y(k),y(k-1)是系統輸出特征變量,也是系統實際輸出變量;u(k)為系統輸入控制特征變量,也是實際對象輸入控制變量;f1(k),f2(k)和g0(k)為特征模型的特征參量,其范圍可事先確定,并且在已知閉凸集內[15]。 基于特征模型的自適應控制器設計,在建立對象的特征模型后,需要對特征模型參數即特征參量進行在線估計。記特征模型參數向量 θ(k)=[f1(k)f2(k)g0(k)]T 數據向量 φ(k)=[y(k)y(k-1)u(k)]T 則特征模型(3)可記為 y(k+1)=θT(k)φ(k) (4) 參數辨識的梯度投影算法為 (5) 參考文獻[15]中定理8.4和定理9.5,對系統設計自適應黃金分割控制器式(6),作為系統控制輸入未受限時的標稱控制器,可以保證閉環系統穩定并滿足性能要求。 u(k+1)= (6) 式中,l1=0.382,l2=0.618,e(k)=y(k)-yr(k),yr(k)為參考輸入。 令xp(k+1)?[y(k)y(k+1)]T,則可將特征模型式(3)寫成狀態空間形式: (7) 其中, 當被控對象的控制輸入存在飽和非線性時,也就是控制輸入滿足 (8) 需要設計合適的模型恢復抗飽和補償器,用于補償閉環系統發生飽和時的控制輸入以及系統輸出,保證發生飽和時閉環系統的控制性能和穩定性。 模型恢復抗飽和是指,從不存在控制輸入飽和約束的控制器角度看,設計的抗飽和補償器恢復了不存在控制輸入飽和的系統模型。根據抗飽和設計流程,首先設計的標稱控制器在不存在控制輸入飽和約束時,閉環系統輸出可以很好地跟蹤輸入指令信號,也就是具有良好的動態輸出響應性能。由此可以知道存在控制輸入飽和約束的抗飽和閉環控制系統在有約束的情況下應該如何響應。通過完全復制被控對象模型,MRAW抗飽和補償器使飽和系統的閉環響應和未飽和系統閉環響應盡可能相同。 常用的MRAW方法框圖如圖1所示。 圖1 MRAW控制結構框圖 在處理高階對象或者非線性對象時,MRAW方法同樣是復制此類模型,設計復雜度卻大大增加。 根據抗飽和設計流程,首先設計不考慮控制輸入飽和的基于特征模型的自適應黃金分割控制器,可以得到穩態時的特征模型。根據特征建模理論,在穩定情況下,對象特征模型和實際對象在輸出上是相等的。因而可以在MRAW中使用穩態特征模型取代原被控對象來求解抗飽和補償器,用線性MRAW抗飽和方法實現高階對象或者非線性對象的抗飽和設計。 穩態時對象特征模型記為 (9) 其中, 這種補償器的設計可以歸結為構造一個狀態反饋控制器,可以使飽和系統的響應趨向于期望的響應。設計如式(10)的模型恢復抗飽和補償器,用于補償閉環系統發生飽和時的控制輸入,整個閉環系統框圖如圖2所示。 圖2 基于特征模型的模型恢復抗飽和控制框圖 (10) 上述抗飽和補償器的輸入為執行器輸出與輸入之差,輸出分別為補償信號υ1和υ2。補償信號υ1使用抗飽和補償器的狀態通過修正控制器的控制輸出來恢復系統退出飽和時的性能;而補償信號υ2通過修正被控對象輸出反饋,補償由于控制量飽和引起的輸出損失,衡量飽和狀態下閉環系統實際輸出與不存在執行器飽和的理想輸出之間的偏差。因而需要選取合適的抗飽和增益K,使υ2盡可能小以獲取較好的跟蹤性能,且閉環系統穩定。 由控制結構圖2可知,存在式(11)和(12)約束 u(k)=sat(ua(k))=sat(uc(k)+υ1(k)) (11) yc(k)=y(k)+υ2(k) (12) 為了分析包含抗飽和補償器的閉環系統穩定性和性能,定義狀態變量ζ(k)=xp(k)+xaw(k),系統輸出ζ(k)=y(k)+υ2(k),因而由式(7)和式(10)可以得到包含抗飽和補償器的閉環系統的狀態方程 (13) 下面分析系統(13)的內穩定性,給定漸進穩定的被控對象,只要保證飽和函數和抗飽和補償器組成的部分是穩定的,那么包含抗飽和補償器的整個閉環系統就是穩定的。 定理1 給定不存在飽和約束的穩定閉環系統和設計好的抗飽和增益K,如果存在,P=PT>0,W=WT>0使得下述矩陣不等式成立,那么飽和函數和抗飽和補償器組成的部分從輸入uc到狀態xaw是l2穩定的。 (14) 證明: 1)扇形飽和函數約束條件 (15) 由式(11)知,ua,k=uc,k+υ1,k=uc,k+Kxaw,k,代入到式(15),可得 (16) 2)l2穩定性證明 (17) 考慮飽和非線性式(16),代入式(17),可得 (18) 由線性矩陣不等式(14)可知,存在足夠小的ε>0,使得下式成立 因而存在 (19) 對式(19)采用完全平方變換,可得 (20) 由式(20)容易得到 (21) 因而存在足夠大的γ>0,使得式(22)成立 (22) 將式(22)兩邊從0到∞相加,可以得到 (23) 由于Lyapunov函數V(xaw,∞)≥0,可知 (24) 因而函數和抗飽和補償器組成的部分從輸入uc,k到狀態xaw,k是l2穩定的 3)轉化為線性矩陣不等式 式(14)是非線性矩陣不等式,可以通過Schur補引理和等價變換轉化成容易求解的線性矩陣不等式。 由式(14)可得 (25) 式(25)用Schur補可得 (26) 式(26)左右同時乘以對角陣diag(I,P-1,W-1),可得 (27) 令Q=P-1,U=W-1,Ω=KQ,則式(27)可以寫成 (28) 因而式(14)的矩陣不等式可以轉化為式(28)的線性矩陣不等式,證畢。 前述分析了給定抗飽和補償增益K,由整個閉環系統的內穩定性,可知求解下述的可行性線性矩陣不等式,即可求得抗飽和補償增益。 Q=QT>0,U=UT>0,Ω=KQ,γ>0。 (29) 考慮被控對象 跟蹤參考輸入yr=2,控制輸入限制M=1,采樣周期T=0.005s。 設計自適應黃金分割控制器,然后根據設計的黃金分割自適應控制器,設計線性MRAW模型恢復抗飽和補償器,所求的抗飽和增益K=[0.0308-0.0334]。 因而所求解的MRAW抗飽和補償器為 控制結果如圖3所示。不存在控制輸入飽和時,所設計的自適應黃金分割控制器經過較短時間的調整,能使系統輸出較好的跟蹤參考信號,當存在控制輸入限制時可以看到控制性能急劇變差,此時加上MRAW抗飽和補償器之后,系統能夠重新很好地跟蹤參考信號,通過局部放大圖可以看到,存在抗飽和補償器時的閉環系統瞬態響應較不受限系統有一定的提升。可知針對此非線性系統,設計自適應黃金分割控制器,進而基于特征模型設計線性MRAW抗飽和補償器,可以實現執行器飽和時的控制性能恢復。 圖3 閉環系統響應 文獻[17]中的被控對象是帶有對稱撓性帆板衛星的俯仰軸動力學的簡化模型: 其中,J為衛星轉動慣量,ω為俯仰角速度,Tt為控制力矩,G=[g1g2]T,為撓性模態與衛星俯仰運動的耦合系數矩陣,q=[q1q2]T為模態坐標,Λ=diag(Λ1,Λ2),為約束模態頻率。 采樣時間0.005s,模型參數: J=3732kg·m2 Λ1=Λ2=diag(0.1979,0.7000,1.2087)×2π 跟蹤通過低通濾波器的方波信號,控制輸入限制M=30,同樣先設計自適應黃金分割控制器,可以滿足不存在輸入飽和時的控制要求,進而設計MRAW抗飽和補償器。 控制結果如圖4所示,可以看到采用MRAW抗飽和補償器之后,系統閉環響應可以較好地跟蹤參考信號,但是在調整階段還是存在一定的性能損失。 圖4 帶有撓性帆板的衛星俯仰軸響應 設計了將基于特征建模的黃金分割控制和MRAW抗飽和策略相結合的抗飽和控制方法。針對傳統MRAW抗飽和方法難以處理高階對象或者非線性對象的問題,利用二階差分特征模型的簡潔形式,以及具有在同樣輸入控制作用下,對象特征模型和實際對象在輸出上是等價的,在穩定情況下輸出是相等的等優點。在抗飽和設計中用二階特征模型取代原被控對象,求解抗飽和補償器中的反饋增益。這樣就將傳統的離散MRAW抗飽和策略推廣到一類高階對象和非線性系統中,擴展了其應用范圍,簡化了這類系統抗飽和補償器設計,可以更好地應用于工程實踐。

1.2 模型恢復抗飽和設計
2 基于特征建模的MRAW方法
2.1 線性MRAW設計
2.2 穩定性分析



3 仿真校驗
3.1 非線性對象
3.2 帶有撓性帆板的衛星俯仰軸控制
4 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45