低軌大規(guī)模Walker通信星座構(gòu)型控制仿真系統(tǒng)研究*
2021-11-16 14:44:24李玖陽王許煜云朝明
航天控制 2021年3期
關(guān)鍵詞:系統(tǒng)
李玖陽 胡 敏 王許煜 云朝明 李 奇
航天工程大學(xué),北京 101416
0 引言
隨著互聯(lián)網(wǎng)技術(shù)的發(fā)展和發(fā)射入軌成本的降低,低軌大規(guī)模Walker星座逐漸出現(xiàn)[1-8],其具有全球覆蓋、低延時、高帶寬的特點(diǎn),滿足了高速率互聯(lián)網(wǎng)通信和導(dǎo)航增強(qiáng)等應(yīng)用要求。目前,出現(xiàn)了許多大規(guī)模低軌Walker星座,OneWeb公司計劃發(fā)射由2620顆衛(wèi)星組成的星座[9]、Samgsung公司計劃發(fā)射由4600顆衛(wèi)星組成的星座[10]、Boeing計劃發(fā)射2956顆衛(wèi)星組成的星座和Starlink最終計劃發(fā)射4.2萬顆衛(wèi)星組成的星座[11-12],這些星座規(guī)模巨大,星座中衛(wèi)星分布密度很高,為了實(shí)現(xiàn)全球覆蓋和星座長期穩(wěn)定運(yùn)行,對星座構(gòu)型保持精度提出了很高的要求,在星座中某些衛(wèi)星損壞時,需要通過在軌重構(gòu)快速恢復(fù)性能,并將損壞衛(wèi)星離軌,保證星座安全穩(wěn)定運(yùn)行。
國內(nèi)外許多學(xué)者對星座仿真系統(tǒng)進(jìn)行了研究。賀勇軍等人[13]以對地觀測和電子偵察衛(wèi)星為對象,設(shè)計實(shí)現(xiàn)了多星系統(tǒng)綜合效能仿真軟件,廖瑛等人[14]為評估衛(wèi)星導(dǎo)航系統(tǒng)星座覆蓋性能、星間鏈路等技術(shù)指標(biāo),設(shè)計實(shí)現(xiàn)了衛(wèi)星星座導(dǎo)航數(shù)學(xué)仿真系統(tǒng),滿足了衛(wèi)星導(dǎo)航系統(tǒng)各生命周期的需求,項(xiàng)軍華等人[15]以導(dǎo)航星座為例,設(shè)計實(shí)現(xiàn)了星座重構(gòu)、構(gòu)型和鏈路設(shè)計和分析系統(tǒng),滿足導(dǎo)航星座在壽命周期內(nèi)的運(yùn)行控制需求。Jean-Francois等人[16]利用Petri網(wǎng)建立了衛(wèi)星星座可用性綜合分析系統(tǒng),該系統(tǒng)綜合考慮衛(wèi)星星座組網(wǎng)、運(yùn)行階段的成本和星座的可用性,綜合評估了星座效能,Nag[17]利用模塊化的方式建立了星座設(shè)計系統(tǒng),該系統(tǒng)將科學(xué)任務(wù)與星座設(shè)計相結(jié)合,實(shí)現(xiàn)了綜合考慮科學(xué)任務(wù)需求的星座設(shè)計。上述多個學(xué)者均針對不同任務(wù)需求建立了星座設(shè)計、運(yùn)行管理等綜合仿真系統(tǒng),但星座規(guī)模較小,且多為中高軌星座,無法滿足低軌大規(guī)模Walker星座的構(gòu)型控制需求。
通過開展大規(guī)模星座軌道預(yù)報仿真、高精度構(gòu)型維持、在軌重構(gòu)和電推進(jìn)離軌控制研究,設(shè)計開發(fā)了低軌大規(guī)模Walker通信星座軌道仿真、構(gòu)型維持、在軌重構(gòu)和電推進(jìn)離軌仿真系統(tǒng)。論文首先描述了該系統(tǒng)的總體設(shè)計,而后給出了軌道仿真、系統(tǒng)構(gòu)型維持、在軌重構(gòu)和電推進(jìn)離軌模塊的實(shí)現(xiàn)途徑,最后利用該系統(tǒng)完成大規(guī)模低軌Walker通信星座構(gòu)型控制過程。
1 系統(tǒng)總體設(shè)計
低軌大規(guī)模Walker星座構(gòu)型控制仿真系統(tǒng)由星座軌道仿真系統(tǒng)、構(gòu)型維持系統(tǒng)、在軌重構(gòu)系統(tǒng)和電推進(jìn)離軌部分組成,功能結(jié)構(gòu)如圖1所示。
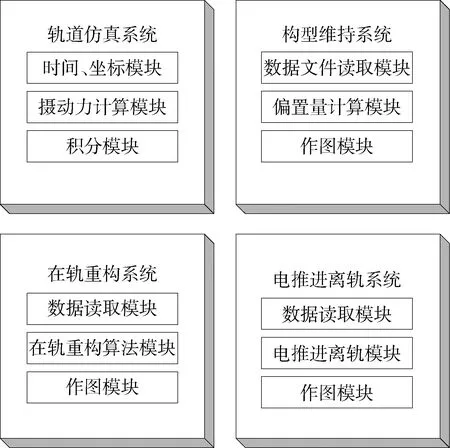
圖1 系統(tǒng)功能結(jié)構(gòu)圖
低軌大規(guī)模Walker星座構(gòu)型控制仿真系統(tǒng)具備以下功能:
1) 軌道仿真分析
軌道仿真分析主要進(jìn)行衛(wèi)星高精度軌道預(yù)報,通過時間、坐標(biāo)和各攝動力模型,進(jìn)行高精度軌道積分,提供低軌大規(guī)模Walker通信星座在一定時間內(nèi)各衛(wèi)星的軌道數(shù)據(jù),作為構(gòu)型維持系統(tǒng)的輸入。
2) 構(gòu)型維持
構(gòu)型維持主要接收軌道仿真系統(tǒng)的低軌大規(guī)模Walker通信星座軌道數(shù)據(jù),利用內(nèi)部偏置算法產(chǎn)生偏置量,用于軌道仿真系統(tǒng)讀取。
3) 在軌重構(gòu)
在軌重構(gòu)主要在低軌大規(guī)模Walker通信星座因衛(wèi)星失效而性能受損時,利用優(yōu)化算法和軌道機(jī)動對在軌剩余衛(wèi)星進(jìn)行重構(gòu),在一定程度上恢復(fù)低軌大規(guī)模Walker通信星座原有性能,得出最優(yōu)化的重構(gòu)方案。
4) 電推進(jìn)離軌
電推進(jìn)離軌主要利用電推力器對低軌大規(guī)模Walker通信星座中的失效衛(wèi)星(其他載荷失效)進(jìn)行離軌,通過優(yōu)化算法得出電推進(jìn)離軌的最優(yōu)控制率,使衛(wèi)星在短時間內(nèi)離軌,保證星座后續(xù)運(yùn)行的安全和穩(wěn)定。
2 分系統(tǒng)實(shí)現(xiàn)
各分系統(tǒng)內(nèi)部由各自的模塊組成,共同支撐起各功能實(shí)現(xiàn)。其中,軌道仿真作為模擬主程序,由C++語言實(shí)現(xiàn),其他功能均與軌道仿真功能中模塊產(chǎn)生交互,由Matlab程序?qū)崿F(xiàn),數(shù)據(jù)傳輸依靠C++與Matlab互聯(lián)和讀取數(shù)據(jù)文件完成,系統(tǒng)框架如圖2所示。
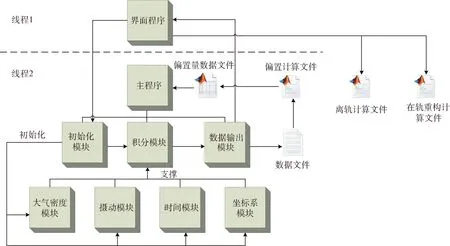
圖2 系統(tǒng)框架圖
2.1 軌道仿真分系統(tǒng)
軌道仿真分系統(tǒng)可分為時間、坐標(biāo)、攝動力計算和積分模塊。衛(wèi)星高精度軌道預(yù)報依賴準(zhǔn)確的時空基準(zhǔn)、攝動加速度和相應(yīng)的數(shù)值積分方法,因此需要將軌道仿真功能分為時間模塊、坐標(biāo)模塊、攝動力計算模塊和積分模塊進(jìn)行研究。
然而,殿閣排序有時出現(xiàn)例外。隆慶元年四月,陳以勤為太子太保禮部尚書文淵閣大學(xué)士,張居正為禮部尚書武英殿大學(xué)士。陳以勤官位在前,殿閣銜卻低于張居正。當(dāng)兩條規(guī)則發(fā)生矛盾時,以第一條規(guī)則為準(zhǔn)。
2.2 構(gòu)型維持分系統(tǒng)
在構(gòu)型維持分系統(tǒng)主要部分為偏置量計算模塊,該模塊利用兩次偏置法接收軌道仿真數(shù)據(jù)產(chǎn)生相應(yīng)偏置量,完成星座構(gòu)型維持功能。
2.2.1 兩次偏置法
升交點(diǎn)赤經(jīng)和沿跡角的相對漂移在攝動影響下隨時間變化滿足如下關(guān)系[18]:
(1)

星座中衛(wèi)星在無初始參數(shù)偏置的情況下,升交點(diǎn)赤經(jīng)和沿跡角相對漂移隨時間變化如式(1)所示,在加入初始偏置量后,引入由初始偏置量產(chǎn)生的一階變化率。在無偏置狀況下,可以通過二次多項(xiàng)式擬合得出一階變化率和變化加速度,進(jìn)而可求解出衛(wèi)星初始偏置量。重復(fù)上述過程,得出第二次偏置的偏置量,兩次偏置量疊加,抵消第一次偏置后的相對漂移一階變化率和變化加速度的殘余項(xiàng)和高階項(xiàng)影響,使星座中各衛(wèi)星的相對漂移達(dá)到較低水平。
2.2.2 偏置量計算模塊
該模塊主要利用兩次偏置法,通過讀入由軌道仿真系統(tǒng)輸出的未偏置時軌道數(shù)據(jù)文件生成偏置量,完成偏置量生成操作。
2.3 在軌重構(gòu)分系統(tǒng)
在軌重構(gòu)分系統(tǒng)主要由在軌重構(gòu)算法模塊組成,該模塊利用相應(yīng)的重構(gòu)指標(biāo)、失效衛(wèi)星分布結(jié)合基于分解的多目標(biāo)進(jìn)化算法(Multiobjective evolutionary algorithm based on decomposition,MOEA/D)得出滿足需求的重構(gòu)方案,完成在軌重構(gòu)過程。
低軌大規(guī)模Walker通信星座在軌重構(gòu)需要在快速恢復(fù)對地覆蓋性能的基礎(chǔ)上,盡可能使重構(gòu)機(jī)動燃料消耗少且均衡。因此,需要用全球平均覆蓋率、燃料消耗均衡度、重構(gòu)總時間和總速度增量作為重構(gòu)指標(biāo),如式(2)所示。
(2)

2.3.2 在軌重構(gòu)算法
在軌重構(gòu)問題本質(zhì)上是一個多目標(biāo)優(yōu)化問題,通過分析低軌大規(guī)模Walker星座的特點(diǎn),利用抬升軌道高度的方法作為參與重構(gòu)衛(wèi)星的機(jī)動方式,如圖3所示。
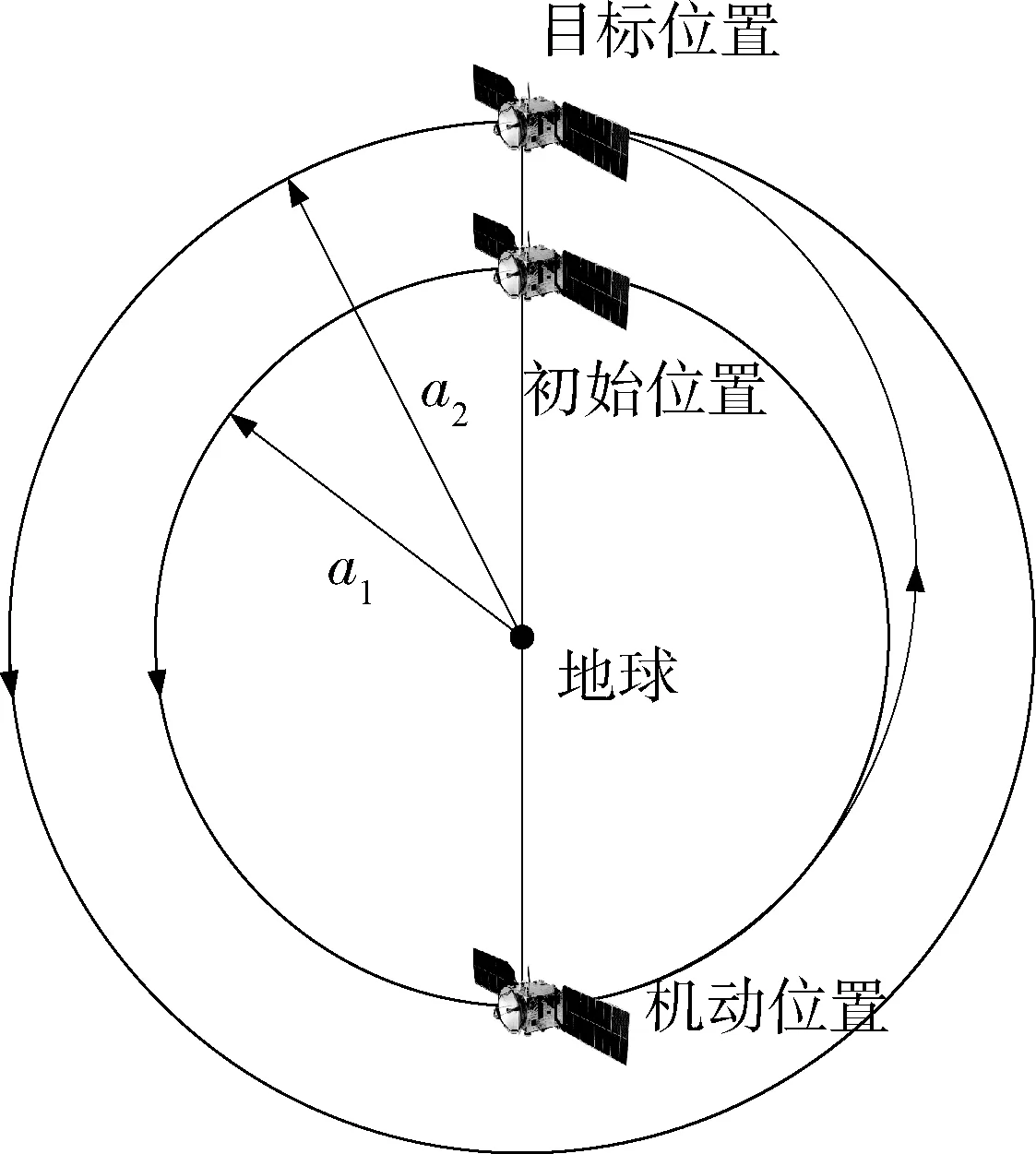
圖3 抬升軌道機(jī)動方式
為了滿足算法運(yùn)算要求,需要將各衛(wèi)星是否參與重構(gòu)和軌道高度調(diào)整量參數(shù)化,如式(3)所示:
(3)
式中:Bi和hi分別代表各衛(wèi)星是否參與重構(gòu)變量和軌道高度調(diào)整量,Bi為0代表不參與重構(gòu),為1代表參與重構(gòu),H為軌道高度調(diào)整量上限,Bi由隨機(jī)數(shù)生成函數(shù)生成[1,3)區(qū)間內(nèi)的值,若Bi∈[1,2)則記為Bi=0,若Bi∈[2,3)則記為Bi=1,hi可由隨機(jī)數(shù)生成函數(shù)生成分布于區(qū)間內(nèi)的隨機(jī)調(diào)整量值。
在參數(shù)化完成后,利用MOEA/D算法進(jìn)行優(yōu)化分析,算法流程如圖4所示。
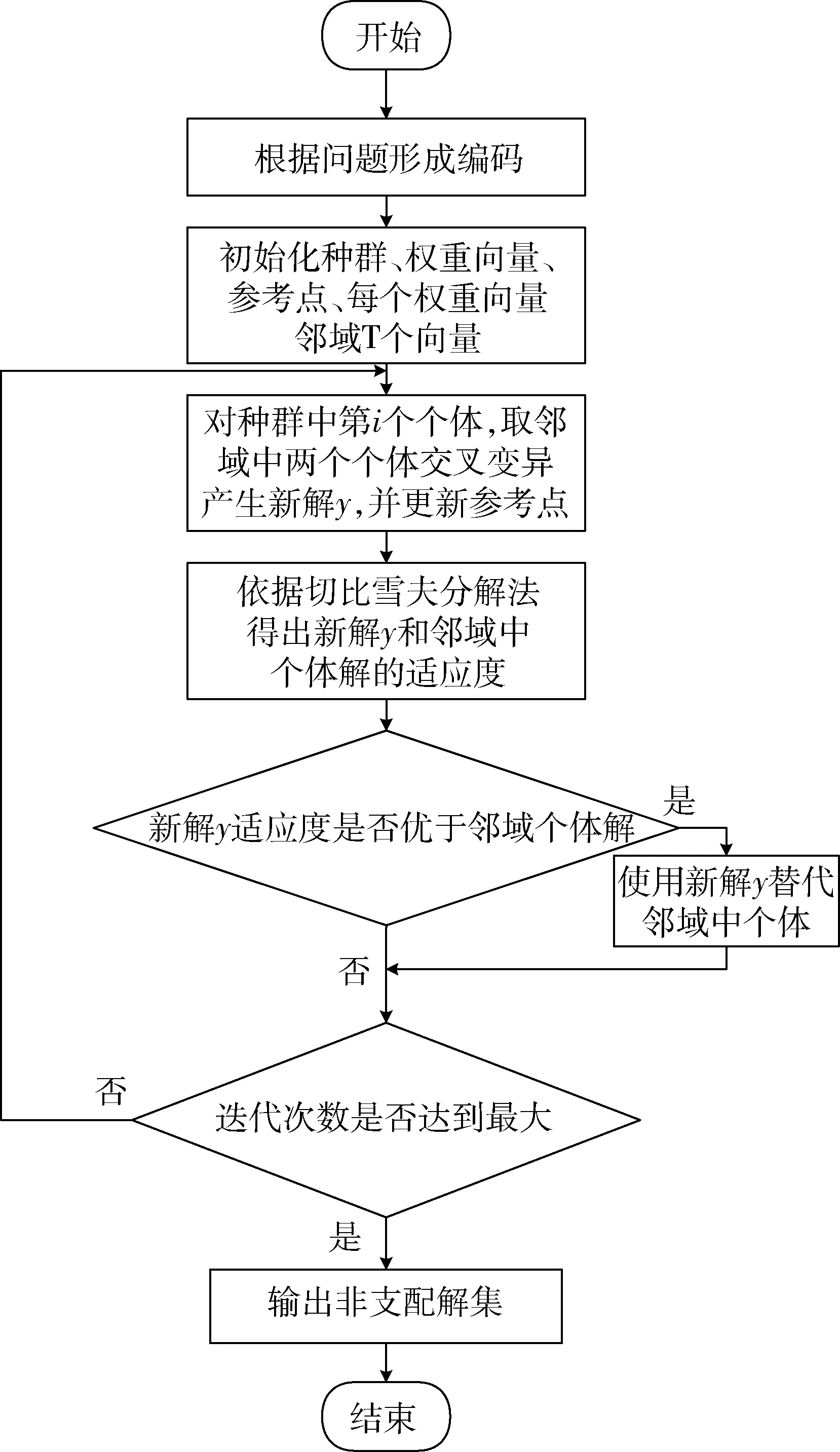
圖4 MOEA/D算法流程圖
2.4 電推進(jìn)離軌分系統(tǒng)
系統(tǒng)讀取需要離軌衛(wèi)星的軌道數(shù)據(jù),然后根據(jù)小推力器的特點(diǎn),結(jié)合哈密爾頓函數(shù)得出帶協(xié)狀態(tài)變量的最優(yōu)控制率,利用增廣拉格朗日粒子群算法[20](Augmented lagrangian particle swarm optimization algorithm,ALPSO)優(yōu)化得出適合離軌的協(xié)狀態(tài)變量,算法流程如圖5所示[19]。
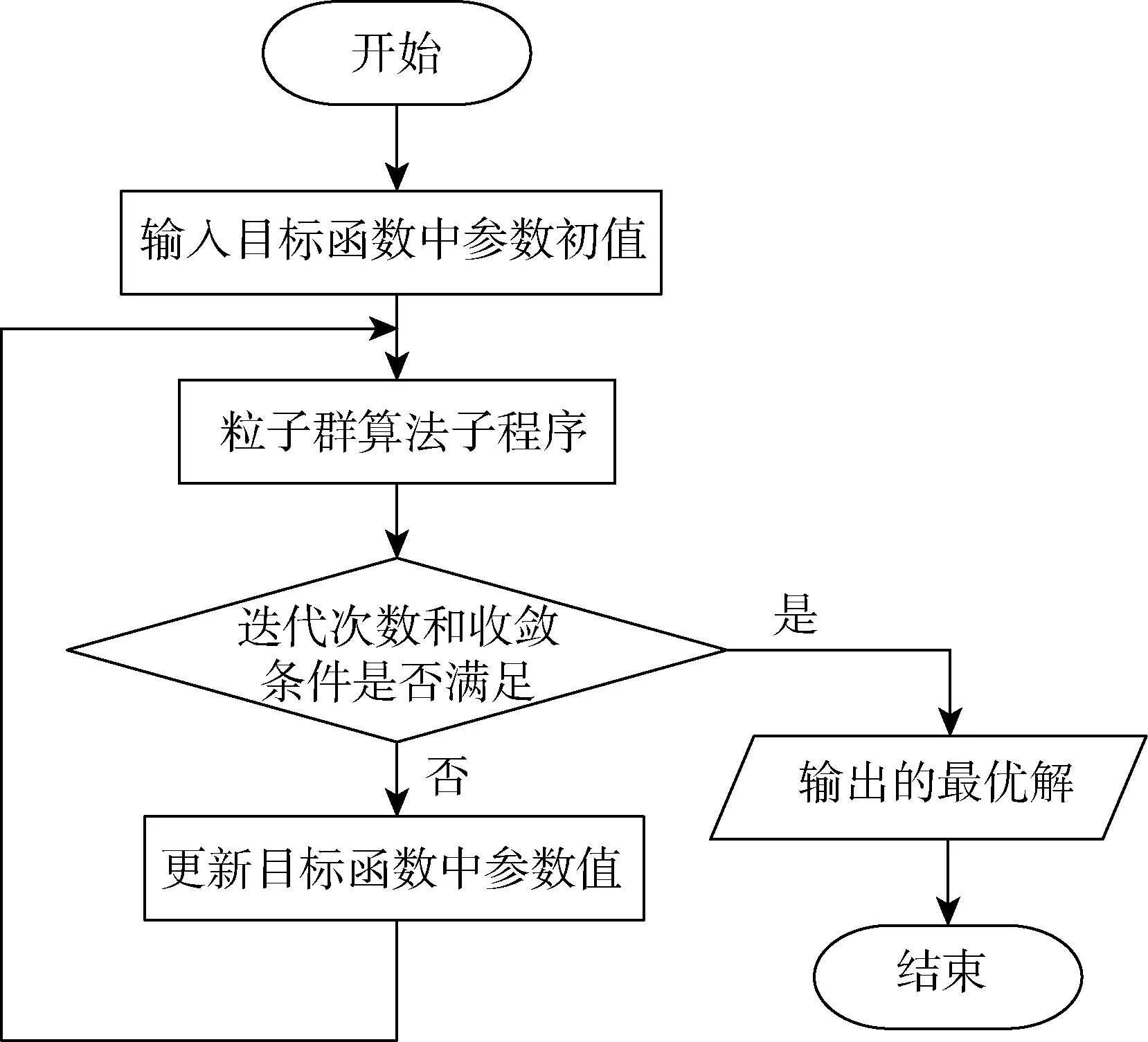
圖5 算法程序框圖
3 系統(tǒng)應(yīng)用實(shí)例
系統(tǒng)對構(gòu)型為80/4/1、軌道高度800km、軌道傾角為60°的低軌大規(guī)模Walker通信星座進(jìn)行構(gòu)型控制分析。所受攝動力為地球非球形J2攝動和大氣阻力攝動,大氣密度模型為Jacchia 70,大氣阻力系數(shù)為2.2,衛(wèi)星面質(zhì)比為0.003,仿真時長為10年,系統(tǒng)主界面如圖6~7所示,圖6是星座定義部分界面,圖7是衛(wèi)星參數(shù)定義部分界面。
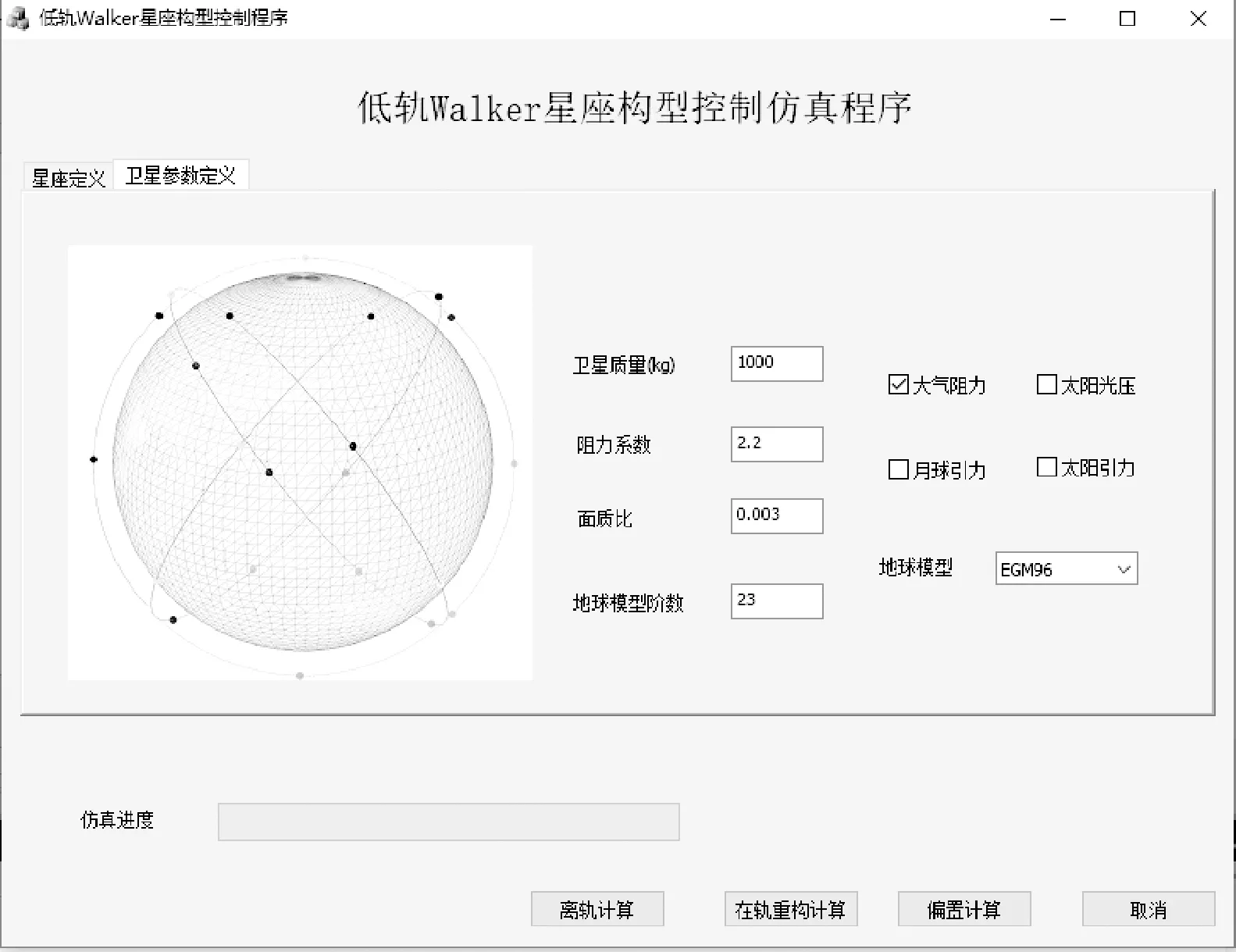
圖7 衛(wèi)星參數(shù)定義界面
通過軌道仿真系統(tǒng)和構(gòu)型維持系統(tǒng)計算出的星座未偏置時相對漂移量如圖8所示,經(jīng)兩次偏置后相對漂移如圖9所示,構(gòu)型維持系統(tǒng)實(shí)現(xiàn)了星座構(gòu)型維持,使星座升交點(diǎn)赤經(jīng)和沿跡角相對漂移均達(dá)到0.1°以下且呈收斂趨勢。
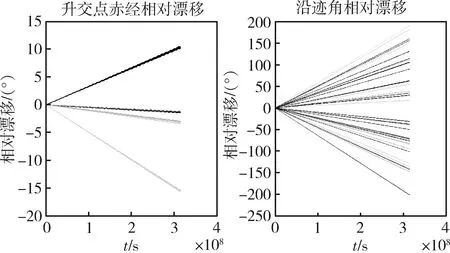
圖8 星座未偏置時相對漂移量
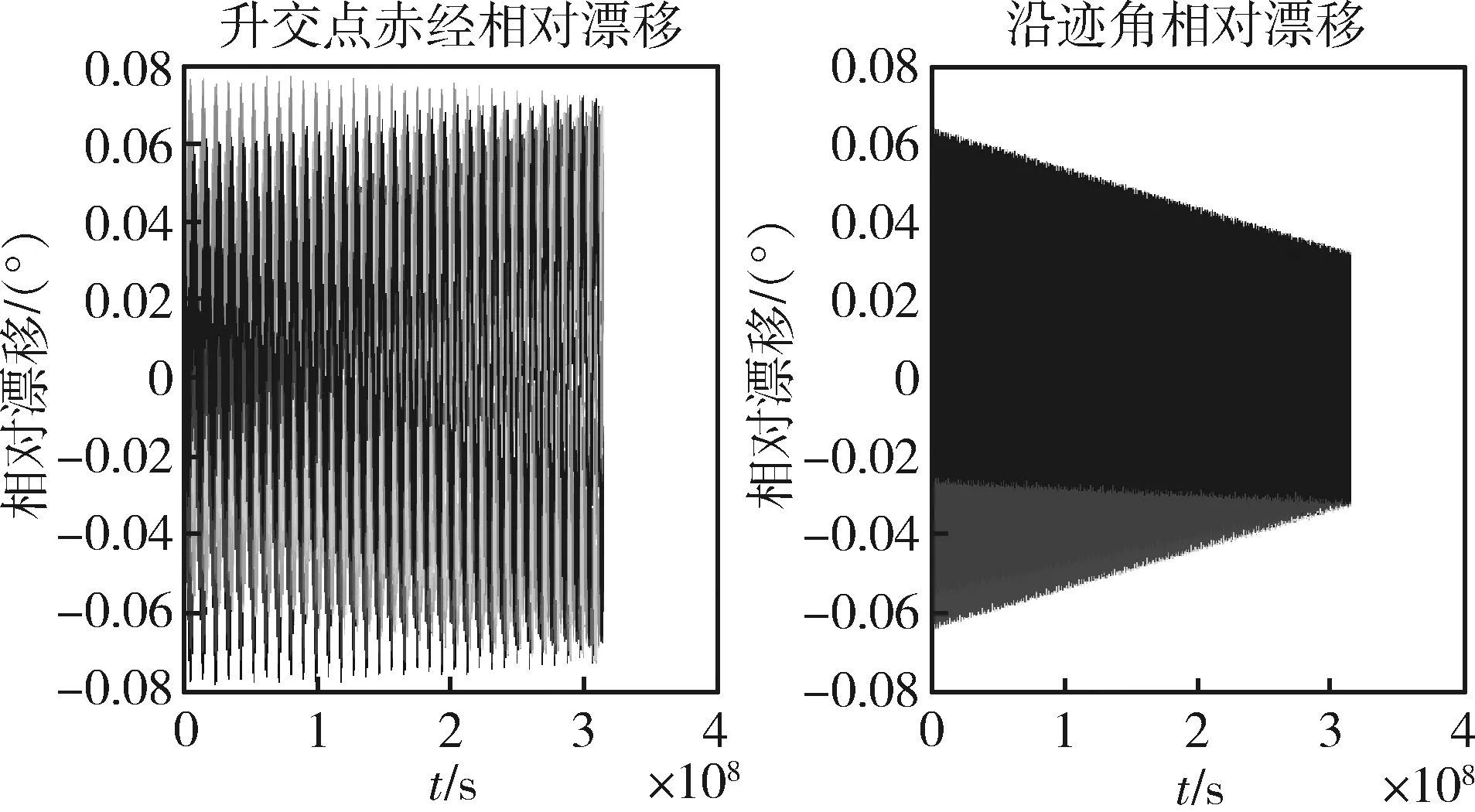
圖9 星座在2次偏置后的相對漂移量
當(dāng)星座中出現(xiàn)衛(wèi)星失效時,可通過在軌重構(gòu)系統(tǒng)重構(gòu)星座。假設(shè)星座衛(wèi)星失效情況如表1所示,全球兩重覆蓋覆蓋率從完整星座狀態(tài)下的98.97%降低至61.86%,星座性能受損接近40%。
表1 失效衛(wèi)星分布
星座在重構(gòu)優(yōu)化后帕累托前沿如圖10~11所示,星座全球兩重覆蓋率恢復(fù)至失效前的水平。
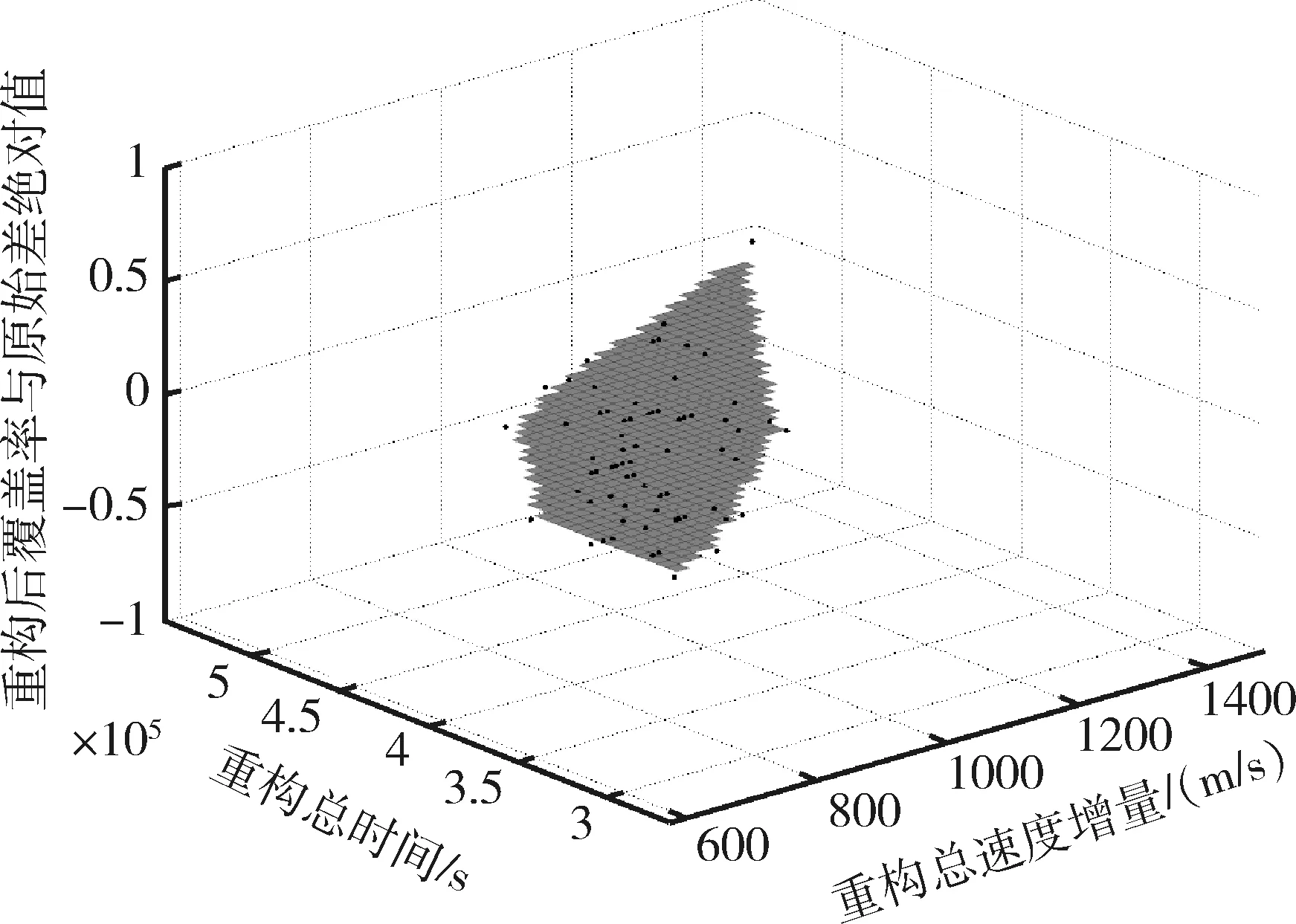
圖10 |Δc|,vsum,tsum的帕累托前沿(|Δc|為當(dāng)前全球兩重覆蓋覆蓋率與失效前覆蓋率差的絕對值。)
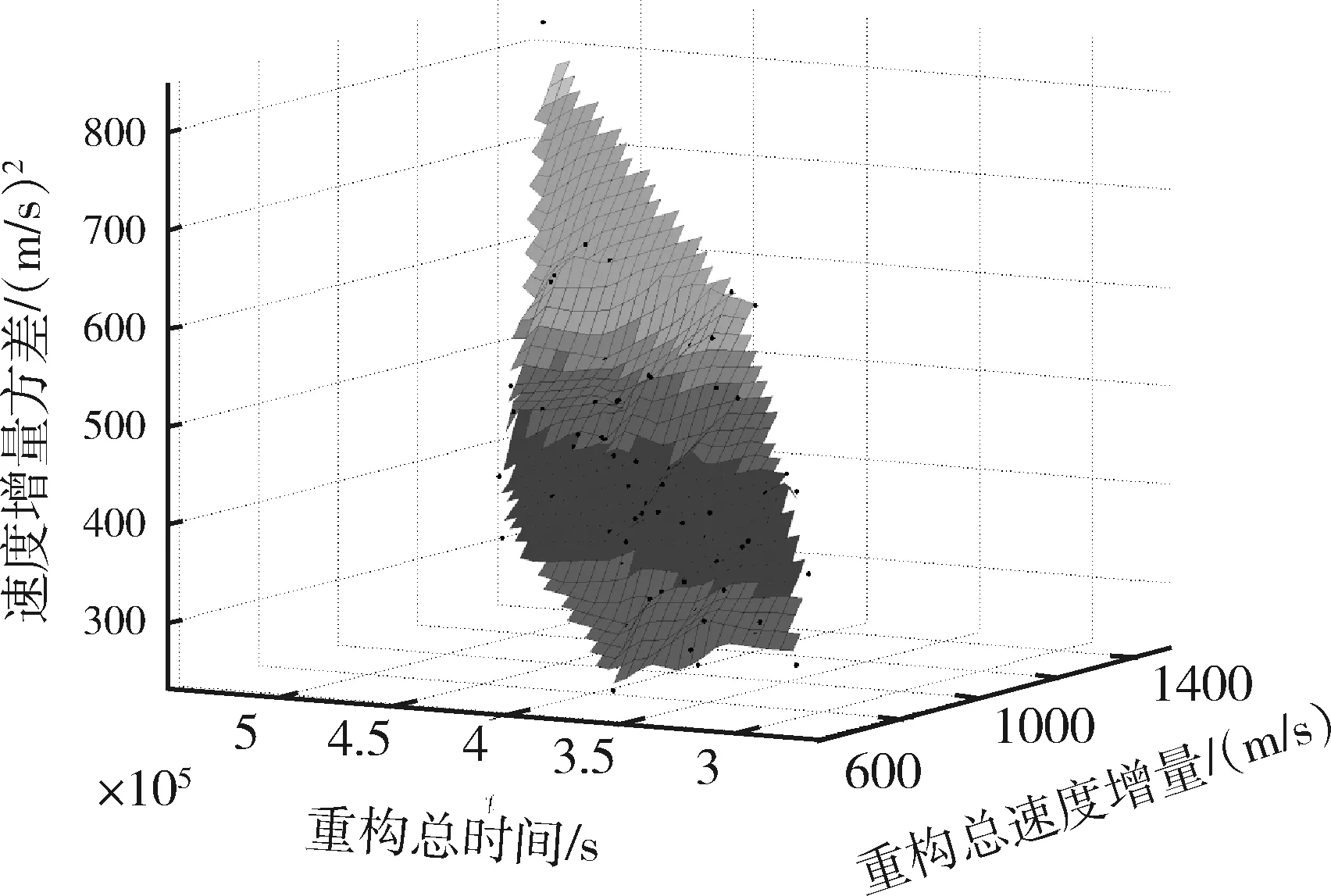
圖11 P,vsum,tsum的帕累托前沿
上述失效衛(wèi)星需要電推進(jìn)離軌系統(tǒng)對其進(jìn)行離軌,以0號軌道面0號衛(wèi)星為例,衛(wèi)星質(zhì)量1000kg、燃料質(zhì)量100kg,其在電推進(jìn)離軌系統(tǒng)中的離軌過程如圖12所示,總計離軌時間為857天,消耗燃料2kg。
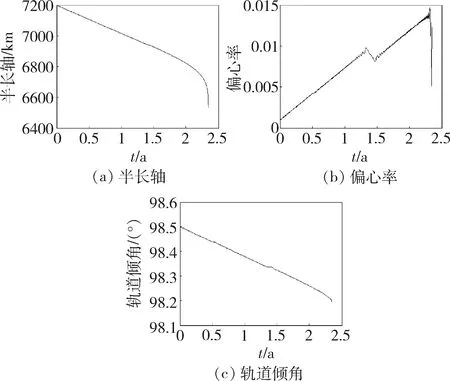
圖12 衛(wèi)星離軌過程
4 結(jié)論
設(shè)計和開發(fā)低軌大規(guī)模Walker通信星座構(gòu)型控制仿真系統(tǒng),主體部分分為軌道仿真分系統(tǒng)、構(gòu)型維持分系統(tǒng)、在軌重構(gòu)分系統(tǒng)和電推進(jìn)離軌分系統(tǒng)。通過低軌大規(guī)模Walker通信星座的實(shí)例表明,系統(tǒng)有效地滿足了低軌大規(guī)模Walker通信星座的構(gòu)型控制需求,為我國低軌大規(guī)模Walker通信星座建設(shè)提供了參考。同時,為應(yīng)對低軌空間逐漸擁擠的現(xiàn)狀,未來將會研究低軌大規(guī)模Walker通信星座的安全性分析分系統(tǒng),進(jìn)一步滿足低軌大規(guī)模星座構(gòu)型控制的需求。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32