虛擬軌道列車循跡控制優(yōu)化模型與仿真研究
2021-11-17 06:52:52曾厚銘賈尚帥
計算機仿真 2021年7期
曾厚銘,車 超,解 靜,賈尚帥
(1. 西南交通大學(xué)牽引動力國家重點實驗室,四川 成都 610031;2. 中車長春軌道客車股份有限公司基礎(chǔ)研發(fā)部,吉林 長春 130062;3. 中國人民解放軍96901部隊24分隊,北京 100094;4. 中車唐山機車車輛有限公司技術(shù)研究中心,河北 唐山 064000)
1 引言
伴隨城市化進程的加快,公共交通運輸越來越難以滿足人們?nèi)找嬖鲩L的出行需求。雖然興建地鐵、輕軌、空軌等可以有效緩解公共交通壓力,但是其建設(shè)周期長、成本高。另一方面,國家新近出臺的國辦發(fā)[2018]52號文件進一步規(guī)范了城市軌道交通修建,大多城市尚不滿足相關(guān)修建要求。在這種情況下,研發(fā)具備較高運載能力,可以在既有道路上行駛的新型城市軌道交通運輸方式勢在必行。虛擬軌道列車[1,2]就是一種符合這些特點和要求的新型城市交通運輸方式。
虛擬軌道列車是智能軌道快運系統(tǒng)的運載工具[3],是通過膠輪承載、以地面虛擬軌道為導(dǎo)向運行的道路列車,其軌道非傳統(tǒng)鋼軌而是在道路上鋪設(shè)感應(yīng)標識形成的虛擬軌道,是一種地面自導(dǎo)向新型城市軌道交通工具。虛擬軌道列車的循跡控制是通過車載感知系統(tǒng)獲取車體與虛擬軌道之間的相對位置和姿態(tài),結(jié)合車體運動狀態(tài)和周邊運行環(huán)境等因素生成控制決策,旨在實現(xiàn)循跡行駛和協(xié)同轉(zhuǎn)向,是虛擬軌道列車的一項關(guān)鍵技術(shù)。德國弗勞恩霍夫交通和基礎(chǔ)設(shè)施系統(tǒng)研究所針對實現(xiàn)循跡行駛和最小化橫向鉸接力這兩個目標,提出了一種三節(jié)編組車輛除首車外所有后車(以下簡稱后車)的橫向控制模型[4,5]。車輛在該模型的控制下,穩(wěn)態(tài)時能實現(xiàn)良好的循跡效果,但在進出圓形軌道時的循跡偏差較大,且越靠后的車輛調(diào)整時間和超調(diào)量都越大,說明該模型對于軌道曲率變化時的循跡效果不佳。因此本文在其基礎(chǔ)上提出一種優(yōu)化模型,對原模型在軌道曲率變化時的循跡效果進行改善;基于虛擬樣機分析軟件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)及其二次開發(fā)技術(shù)建立三節(jié)編組的虛擬樣機模型并實現(xiàn)循跡控制仿真,驗證所提出的優(yōu)化模型的控制效果。
2 循跡控制優(yōu)化模型
原模型在軌道曲率變化處,如由直線進入圓形軌道,當首車開始入彎時,后車還處在直線軌道上,但此時后車后軸已開始轉(zhuǎn)向,雖然使用一階慣性環(huán)節(jié)進行遲滯,但循跡效果不佳,究其原因是一階慣性環(huán)節(jié)的響應(yīng)與理想轉(zhuǎn)角變化不符。因此在原模型的基礎(chǔ)上,將原模型的一階慣性環(huán)節(jié)改為增設(shè)多個傳遞環(huán)節(jié),使其響應(yīng)盡可能逼近理想轉(zhuǎn)角。
2.1 后車后軸理想轉(zhuǎn)角計算
當跟蹤點設(shè)置在鉸接處時,嚴格循跡的狀態(tài)下各后車的運動狀態(tài)都完全相同,后軸的理想轉(zhuǎn)角變化也相同,循跡控制容易實現(xiàn)。因此,循跡優(yōu)化模型的跟蹤點設(shè)置在鉸接處。
以第i節(jié)車為例,將其簡化為如圖1所示的幾何模型,車輛尺寸參數(shù)L,lF,lR,l均為已知,目標軌道半徑R可由首車運動狀態(tài)計算得到。從第i節(jié)車前鉸Gi-1抵達直線與圓的交界處時,認為其開始入彎,圖1中的粗虛線就表示該時刻的車輛狀態(tài)。根據(jù)跟蹤點在目標軌道上運動且速度方向與目標軌道相切的性質(zhì),得到該車速度瞬心Mi,再根據(jù)幾何關(guān)系,求解后軸A2i的理想轉(zhuǎn)角。

圖1 后軸理想轉(zhuǎn)角計算原理圖
設(shè)從第i節(jié)車開始入彎后,后鉸Gi移動的距離為s′(0≤s′≤L),先求Gi與目標軌道圓心O間的距離

(1)
在△Gi-1OGi中,由余弦定理求解ξi-1和βi-1

(2)

(3)
從而,求得Mi與Gi-1間距

(4)
在△Gi-1MiA2i中,由余弦定理可得A2i軸的轉(zhuǎn)動半徑

(5)
最后,在該位置時A2i軸的理想轉(zhuǎn)角

(6)
為驗證上述推導(dǎo)結(jié)果,在ADAMS軟件中建立了一個簡化模型,將車輛簡化為桿件,并將跟蹤點使用點線副強制約束在預(yù)設(shè)軌道中線上,給予模型一個初速度,移除重力和摩擦等因素進行仿真,輸出仿真結(jié)果并計算后軸位置處的速度與車體縱軸線間的夾角,所得夾角即為跟蹤點嚴格循跡時的后軸轉(zhuǎn)角。理論推導(dǎo)和簡化模型仿真得到的基于路程的后軸理想轉(zhuǎn)角對比如圖2所示,結(jié)果基本一致。
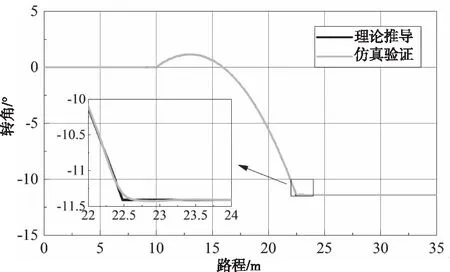
圖2 后軸理想轉(zhuǎn)角理論推導(dǎo)及仿真驗證對比
2.2 后車后軸轉(zhuǎn)角控制模型
將原模型的一階慣性環(huán)節(jié)改為三個由一階、微分、延遲、比例環(huán)節(jié)組成的傳遞環(huán)節(jié)并聯(lián),其傳遞函數(shù)[6]分別為

(7)
式中,s為復(fù)變數(shù),X(s)為輸入量的拉氏變換,Y1(s),Y2(s),Y3(s)分別為三個傳遞環(huán)節(jié)輸出量的拉氏變換,T1,T2,T3,T4,T5,T6,K1,K2,K3,τ1,τ2為傳遞環(huán)節(jié)的參數(shù)。
以第一個傳遞環(huán)節(jié)為例,進行拉式逆變換,可得微分方程

(8)
式中,x(t)、y1(t)分別表示輸入信號和該傳遞環(huán)節(jié)的響應(yīng)信號。
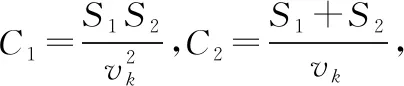
考慮到實際應(yīng)用,需使用離散形式。同時考慮到車輛的運行速度會發(fā)生變化,后軸轉(zhuǎn)角基于時間遲滯則不能滿足循跡精度的要求,因此將后軸轉(zhuǎn)角基于路程遲滯,將時間常數(shù)T1、T2寫為

(9)
式中,S1、S2為路程常數(shù),vk表示在第k步時的速度。
此時時間常數(shù)T1、T2變?yōu)榕c當前速度相關(guān)的變參數(shù),另外用路程延遲S′1代替表示時間延遲的τ1,則式(8)可寫為

(10)
式中,xk、y1k為x(t)、y1(t)的離散形式,分別表示第k步時的輸入信號和該傳遞環(huán)節(jié)的響應(yīng)信號,k1表示第k步的S′1路程前的步數(shù)。
設(shè)第k步時車輛行進的總路程

(11)
式中,Δt為時間步長。
由于Sk是單增的,則k1可由式(12)確定。
Sk1-1≤Sk-S′1≤Sk1
(12)

(13)

(14)
用同樣的方法可得其余兩個環(huán)節(jié)的響應(yīng),再將三個響應(yīng)疊加即得最終響應(yīng)。
為使所得響應(yīng)逼近理想轉(zhuǎn)角,需計算參數(shù)X=[S1,S2,S3,S4,S5,S6,K1,K2,K3,S′1,S′2]的最優(yōu)解。該問題的數(shù)學(xué)模型為
s.t.lb≤X≤ub
(15)
式中,nk為總步數(shù),fk為第k步時的理想轉(zhuǎn)角,ub和lb分別為解空間的上限和下限。
利用MATLAB中的GA函數(shù),即通過模擬自然進化過程搜索最優(yōu)解的遺傳算法對上述問題進行求解,得到參數(shù)X的最優(yōu)解,從而計算后軸轉(zhuǎn)角基于路程的響應(yīng),該響應(yīng)與理論推導(dǎo)得出的理想轉(zhuǎn)角對比如圖3所示。

圖3 后軸理想轉(zhuǎn)角與響應(yīng)曲線對比
3 仿真平臺
3.1 虛擬樣機模型
根據(jù)文獻[5]研究的符合虛擬軌道列車特點的雙鉸接道路客車參數(shù),本文在ADAMS軟件的View模塊中建立了如圖4所示的三節(jié)編組虛擬軌道列車虛擬樣機模型[7]。關(guān)于該模型相關(guān)內(nèi)容的說明見表1。
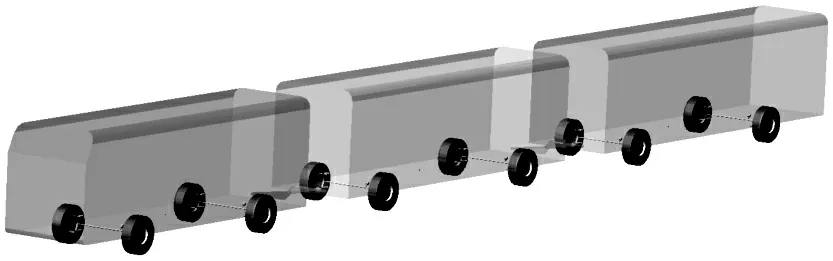
圖4 虛擬軌道列車虛擬樣機模型
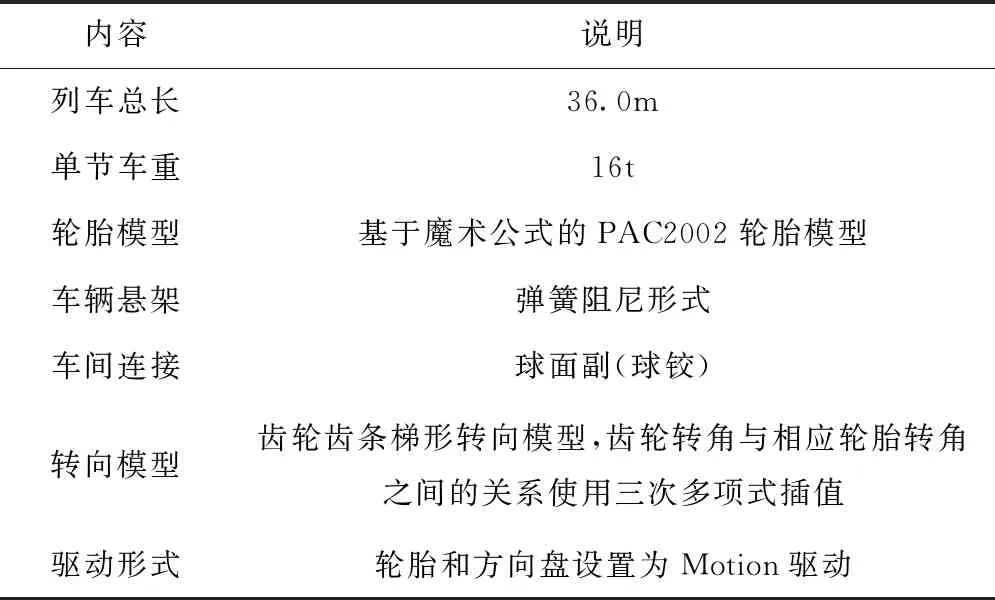
表1 虛擬軌道列車虛擬樣機模型說明
3.2 ADAMS二次開發(fā)技術(shù)
ADAMS本身的控制模塊和函數(shù)表達式都不足以實現(xiàn)本文復(fù)雜的循跡控制,因此,需要使用更具有通用性和靈活性的二次開發(fā)技術(shù)。用戶自定義函數(shù)[8]作為一種ADAMS二次開發(fā)技術(shù)的方式,能夠按照用戶的需求,利用通用程序設(shè)計語言(FORTRAN或C)量身設(shè)計ADAMS/View不能提供的函數(shù)并與其連接,這種方法不會折損ADAMS/View的任何功效,對仿真速度也沒有影響。
ADAMS用戶自定義函數(shù)在本文中的應(yīng)用流程如圖5所示。首先使用C語言將運行工況、循跡控制模型、目標軌道都編寫入控制代碼中。隨后使用C++編譯器將控制代碼文件編譯成ADAMS可以直接作為求解庫調(diào)用的動態(tài)鏈接庫(Dynamic Link Library,簡稱DLL)文件,被ADAMS中每個作為執(zhí)行機構(gòu)的Motion調(diào)用。在仿真時,用戶自定義函數(shù)從虛擬樣機模型中獲取需要測量的信息,進而求解出需執(zhí)行機構(gòu)執(zhí)行的命令,在虛擬樣機模型中作動,最終得到列車響應(yīng)。
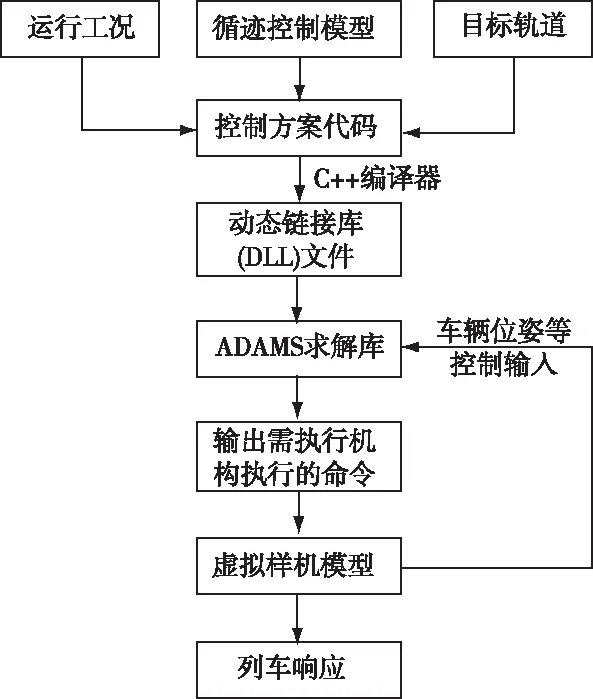
圖5 ADAMS自定義函數(shù)應(yīng)用流程
4 仿真結(jié)果
由于實際道路的道路中線通常由直線和圓弧組成,因此,本文使用的“Ω”形軌道可以模擬列車典型的運行工況。仿真時,列車一開始處在直線軌道上,隨后沿半徑為17.5米的圓形軌道行駛,轉(zhuǎn)過360°后列車再次直行。除了穩(wěn)態(tài)行駛之外,此工況還包括進出圓形軌道的瞬態(tài),這也是該優(yōu)化模型重點考慮的工況。
該優(yōu)化模型旨在通過控制后車后軸轉(zhuǎn)角在轉(zhuǎn)向行為改變時的變化過程,從而改善循跡效果。仿真結(jié)果中的后車后軸內(nèi)輪轉(zhuǎn)角變化曲線如圖6所示,結(jié)合第2章內(nèi)容可以看出,這一變化過程符合本文的預(yù)期。

圖6 后車后軸內(nèi)輪轉(zhuǎn)角
仿真結(jié)果的循跡效果如圖7所示。由于本文將跟蹤點設(shè)置在鉸接處(尾車設(shè)置在車尾處),而首車單獨進行控制,非本文的研究內(nèi)容,且首車的運動幾乎不受后車的影響,則認為首車循跡效果良好,因此圖7只給出作為參考的預(yù)設(shè)虛擬軌道中線,以及表征后車循跡效果的后鉸和車尾處的運動軌跡和橫向偏差。

圖7 跟蹤點的循跡效果
根據(jù)圖7(a)顯示的結(jié)果,優(yōu)化后跟蹤點運動軌跡與預(yù)設(shè)虛擬軌道中線的重合度高。圖7(b)顯示,列車在穩(wěn)態(tài)時循跡效果依然很好,并且在進出圓形軌道的瞬變過程,該模型也有著顯著的優(yōu)化效果:最大橫向偏差小于0.1m,相較于原模型的小于1.0m降低了一個數(shù)量級。
圖8顯示了前后鉸接的橫向作用力。由于對于后車前軸的轉(zhuǎn)角控制仍然采用德國弗勞恩霍夫?qū)嶒炇业哪P汀<匆韵噜弮绍囋阢q接處的速度方向相等為原則,盡量減小影響循跡行駛的橫向鉸接力。因此本文的結(jié)果與原模型一致,產(chǎn)生的最大橫向鉸接力小于4kN,不會導(dǎo)致輪胎側(cè)向力過大而惡化循跡效果,且鉸接處能承受這種大小的持續(xù)橫向載荷。

圖8 前后鉸接橫向作用力
5 結(jié)語
對德國弗勞恩霍夫交通和基礎(chǔ)設(shè)施系統(tǒng)研究所提出的一種多節(jié)后車橫向循跡控制模型進行了研究,該模型使得車輛在穩(wěn)態(tài)時能實現(xiàn)良好的循跡效果,但在軌道曲率變化時的循跡效果不佳。因此本文在其基礎(chǔ)上提出了一種優(yōu)化模型,將跟蹤點設(shè)置在鉸接處,計算車輛進出圓形軌道的后車后軸理想轉(zhuǎn)角,將原模型的一階慣性環(huán)節(jié)替換為三個組合環(huán)節(jié),傳遞環(huán)節(jié)參數(shù)通過遺傳算法(MATLAB的GA函數(shù))求得最優(yōu)解。根據(jù)德國弗勞恩霍夫交通和基礎(chǔ)設(shè)施系統(tǒng)研究所研究的符合虛擬軌道列車特點的雙鉸接道路客車參數(shù),利用ADAMS軟件建立了三節(jié)編組的虛擬軌道列車虛擬樣機模型,并通過ADAMS二次開發(fā)技術(shù)將循跡控制模型應(yīng)用在仿真驗證中。仿真結(jié)果表明,該優(yōu)化模型有明顯的優(yōu)化效果,最大橫向偏差小于0.1m,相較于原模型的小于1.0m降低了一個數(shù)量級。同時,由于仍然對后車前軸采用最小化橫向鉸接力的控制模型,最大橫向鉸接力足夠小,不會對循跡效果產(chǎn)生影響。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-11-30 02:58:01
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年8期)2016-10-09 02:11:50
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中國醫(yī)藥科學(xué)(2015年19期)2015-02-27 12:33:11
