152 000載重噸穿梭油船動(dòng)力定位系統(tǒng)淺析
2021-11-17 13:31:40李景贊
船舶與海洋工程 2021年5期
李景贊
(舟山中遠(yuǎn)海運(yùn)重工有限公司,浙江 舟山 316131)
0 引 言
穿梭油船主要用于在浮式生產(chǎn)儲(chǔ)油卸油裝置(Floating Production Storage and Offloading,FPSO)與采油平臺(tái)之間駁運(yùn)原油。由于海上石油轉(zhuǎn)運(yùn)技術(shù)要求較高,因此穿梭油船除了具有一般油船的設(shè)備以外,還具有很多其他設(shè)備,比如動(dòng)力定位系統(tǒng)和艏裝載系統(tǒng)等,其造價(jià)遠(yuǎn)高于同等噸位油船。舟山中遠(yuǎn)海運(yùn)重工有限公司建造的152 000載重噸穿梭油船是其與挪威船東合作的項(xiàng)目,該船已成功交付2艘,并已在南美投入運(yùn)營(yíng)。該船在裝卸和駁運(yùn)原油過程中的各項(xiàng)性能指標(biāo)表現(xiàn)良好,未出現(xiàn)任何異常,得到了船東的好評(píng)。目前該型船已成為舟山中遠(yuǎn)海運(yùn)重工有限公司的特色品牌船型。本文主要對(duì)該152 000載重噸穿梭油船動(dòng)力定位系統(tǒng)的配置進(jìn)行簡(jiǎn)單介紹。
1 船舶動(dòng)力定位系統(tǒng)的概念和工作原理
船舶動(dòng)力定位是指船舶或海上平臺(tái)不借助錨泊系統(tǒng)的作用,利用自身裝備的各類傳感器測(cè)出船舶的運(yùn)動(dòng)狀態(tài)和位置變化,以及外界風(fēng)力、波浪和海流等擾動(dòng)力的大小與方向,并利用計(jì)算機(jī)進(jìn)行實(shí)時(shí)計(jì)算,使船上的各推力裝置產(chǎn)生適當(dāng)?shù)耐屏土兀缘窒麛_動(dòng)力,從而使船舶盡可能地保持目標(biāo)船位和艏向。目前,動(dòng)力定位的功能和適用范圍正在逐漸擴(kuò)大。采用動(dòng)力定位技術(shù),能使船舶與其他船舶保持相對(duì)位置不變,使船舶按預(yù)定的軌跡移位,按預(yù)定的計(jì)劃航線以預(yù)定航速航行和對(duì)水下目標(biāo)進(jìn)行自動(dòng)跟蹤等。
圖1為動(dòng)力定位系統(tǒng)的基本工作原理。船舶在海上除了受到自身推力器的推力以外,還受到風(fēng)力、波浪和海流的作用力,從而產(chǎn)生6個(gè)自由度的運(yùn)動(dòng),即縱蕩、橫蕩、升沉、縱搖、橫搖和艏搖。動(dòng)力定位系統(tǒng)利用位置測(cè)量設(shè)備測(cè)出自身位置的變化,利用各類傳感器測(cè)出艏向、縱搖、橫搖、風(fēng)力和風(fēng)向,并采用現(xiàn)代控制理論建立船舶與推力器的數(shù)學(xué)模型。
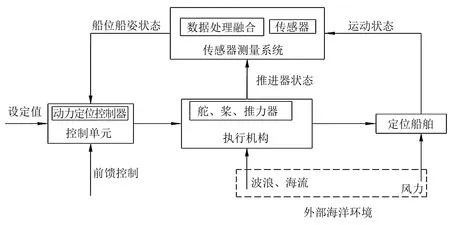
圖1 動(dòng)力定位系統(tǒng)的基本工作原理
2 船舶動(dòng)力定位系統(tǒng)的組成
船舶動(dòng)力定位系統(tǒng)通常由測(cè)量部分、控制部分和執(zhí)行部分等3部分組成。
2.1 測(cè)量部分
測(cè)量部分包括位置測(cè)量設(shè)備(用于測(cè)量船舶的位置)和傳感器(用于測(cè)量船舶的艏向、運(yùn)動(dòng)狀態(tài)和外界環(huán)境狀態(tài)),一般配有全球衛(wèi)星定位系統(tǒng)(Difference Global Positioning System,DGPS)、俄羅斯的GLONASS(Global Navigation Satellite System)、差動(dòng)絕對(duì)和相對(duì)定位系統(tǒng)(Differential Absolute and Relative Positioning System,DARPS)、水聲定位系統(tǒng)(Hipap Position System)、遠(yuǎn)程微波系統(tǒng)(X Position Reference,XPR)、羅經(jīng)、運(yùn)動(dòng)參考單元(Motion Reference Unit,MRU)、激光位置參照系統(tǒng)和風(fēng)速風(fēng)向儀等。
1)DARPS是一套基于GPS和GLONASS的系統(tǒng),使用同時(shí)從遠(yuǎn)程目標(biāo)物和本船上的高性能傳感器中收集的GPS/GLONASS數(shù)據(jù)計(jì)算到目標(biāo)的距離和方位。2套DARPS之間的數(shù)據(jù)由運(yùn)行的超高頻無線電單位傳送。
2)XPR工作在9.2~9.3 GHz頻段。當(dāng)同時(shí)使用幾個(gè)傳感器單元時(shí),將這些傳感器單元布置在不同方向可使該系統(tǒng)的操作范圍擴(kuò)大到280°。該系統(tǒng)可與動(dòng)態(tài)定位系統(tǒng)等遠(yuǎn)程系統(tǒng)交互,具有目標(biāo)自動(dòng)選擇、內(nèi)置系統(tǒng)測(cè)試和驗(yàn)證功能。
2.2 控制部分
控制部分是動(dòng)力定位系統(tǒng)的核心,主要是對(duì)測(cè)量部分測(cè)量到的船舶運(yùn)動(dòng)信息和當(dāng)前環(huán)境作用信息進(jìn)行處理,根據(jù)處理結(jié)果向推力器發(fā)出控制信號(hào),以對(duì)推力器進(jìn)行控制,使船舶的推力裝置產(chǎn)生適當(dāng)?shù)耐屏土兀瑥亩窒麛_動(dòng)力,進(jìn)而使船舶在外力和推力器推力的作用下盡可能地保持目標(biāo)船位和艏向。
2.3 執(zhí)行部分
執(zhí)行部分是動(dòng)力定位系統(tǒng)的執(zhí)行機(jī)構(gòu),根據(jù)控制部分的指令產(chǎn)生推力和力矩,以平衡作用于船上的擾動(dòng)力和擾動(dòng)力矩。動(dòng)力定位船舶通常設(shè)置有多臺(tái)推力器,包括主推進(jìn)螺旋槳、舵和艏艉輔助推力裝置(包括側(cè)向推力器和全回轉(zhuǎn)推力器)。
3 船舶定位系統(tǒng)在穿梭油船上的應(yīng)用
以舟山中遠(yuǎn)海運(yùn)重工有限公司建造的152 000載重噸穿梭油船為例,對(duì)船舶動(dòng)力定位系統(tǒng)在穿梭油船上的應(yīng)用進(jìn)行介紹。該船采用一套雙冗余動(dòng)力定位系統(tǒng),該系統(tǒng)滿足挪威船級(jí)社(Det Norske Veritas,DNV)DYNPOS(AUTR)的要求,功能齊全、強(qiáng)大(見圖2)。
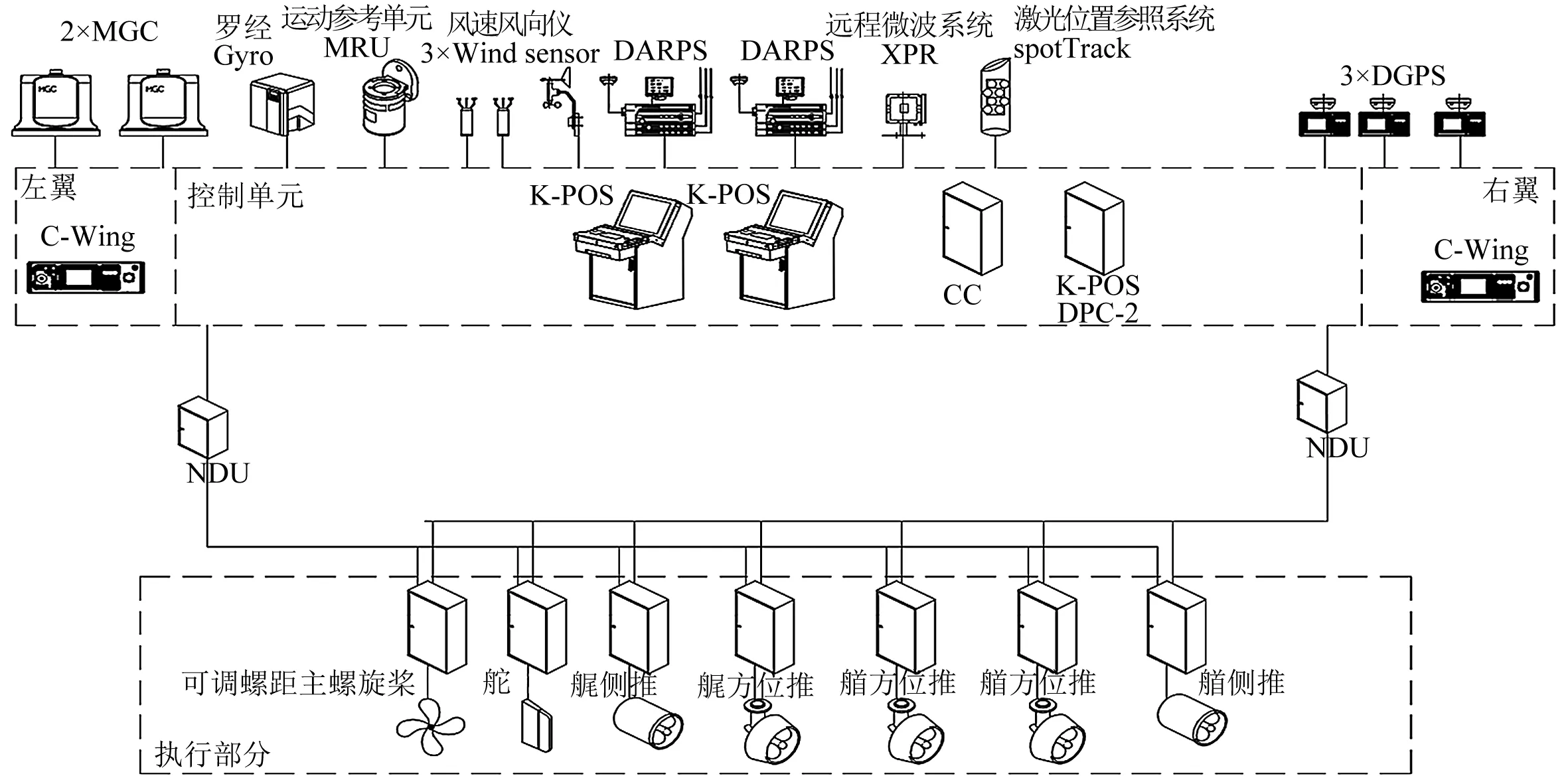
圖2 穿梭油船上的動(dòng)力定位系統(tǒng)的基本組成
該動(dòng)力定位系統(tǒng)由1套雙冗余控制器單元(DPC-2)和2個(gè)操作站(K-POS)組成。
控制器單元包含2個(gè)功能強(qiáng)大的控制計(jì)算機(jī)和監(jiān)測(cè)報(bào)警單元,為位置參考系統(tǒng)、傳感器和雙網(wǎng)絡(luò)系統(tǒng)提供接口。每個(gè)操作站都包含1臺(tái)運(yùn)行Windows系統(tǒng)的高性能計(jì)算機(jī)、高分辨率的彩色平板顯示器和經(jīng)過認(rèn)證的可顯示海上工程作業(yè)數(shù)據(jù)的主要圖形顯示器。該系統(tǒng)具有雙冗余、無單點(diǎn)故障等特點(diǎn),同時(shí)具有故障檢測(cè)、故障隔離、熱備轉(zhuǎn)換和對(duì)傳輸?shù)接?jì)算機(jī)上的不同傳感器數(shù)據(jù)進(jìn)行分析等功能。
該系統(tǒng)采用擴(kuò)展式卡爾曼濾波,建立一套船舶數(shù)學(xué)模型。擴(kuò)展的卡爾曼濾波器具有以下優(yōu)點(diǎn):
1)根據(jù)噪聲水平和測(cè)量更新頻率,對(duì)航向和位置測(cè)量進(jìn)行最佳的自適應(yīng)噪聲濾波;
2)對(duì)不同位置參考系統(tǒng)的數(shù)據(jù)進(jìn)行比較之后給出最佳組合;
3)在缺乏位置測(cè)量的情況下,該模型可提供一種“推算船位”模式。
在定位操作中,該系統(tǒng)的控制器具有高精度控制、偏移回饋、風(fēng)力前饋和涌流反饋等特性,同時(shí)具有環(huán)境補(bǔ)償、模型預(yù)測(cè)控制和位置預(yù)測(cè)等功能。
3.1 該型船的動(dòng)力定位系統(tǒng)的基本配置
該船配有3套DGPS、2套無線電定位系統(tǒng)、1套XPR、2套光纖羅經(jīng)、1套陀螺羅經(jīng)、1套運(yùn)動(dòng)參考單元、1套激光位置參照系統(tǒng)和3套風(fēng)速風(fēng)向儀。
控制部分采用雙回路的數(shù)據(jù)處理單元和多套多功能控制臺(tái),能實(shí)現(xiàn)傳感器系統(tǒng)數(shù)據(jù)處理,當(dāng)1個(gè)傳感器組包含2臺(tái)傳感器(已啟用)時(shí),若采集的數(shù)據(jù)出現(xiàn)偏差,將執(zhí)行差異測(cè)試。此外,能實(shí)現(xiàn)位置參考系統(tǒng)數(shù)據(jù)處理、系統(tǒng)報(bào)警診斷、報(bào)警顯示和信息打印輸出等功能。
該船的執(zhí)行部分配備1臺(tái)持續(xù)服務(wù)功率為13 208 kW、轉(zhuǎn)速為74 r/min的MAN 6G70ME-C10.5 CPP主機(jī),驅(qū)動(dòng)可調(diào)螺距螺旋槳;配置2臺(tái)電動(dòng)機(jī)驅(qū)動(dòng)的油泵進(jìn)行螺距控制,1臺(tái)電動(dòng)機(jī)驅(qū)動(dòng)的油泵進(jìn)行零螺距系統(tǒng)控制。可調(diào)螺距推力器和舵機(jī)輔助系統(tǒng)配置冗余電源,單電源出現(xiàn)故障不會(huì)對(duì)系統(tǒng)產(chǎn)生直接影響。3套可調(diào)螺距可伸縮方位推力器由電機(jī)驅(qū)動(dòng)。每套方位推力器都裝備有1個(gè)啟動(dòng)面板,可在需要時(shí)單獨(dú)控制。2套艏方位角推力器的額定功率均為3 100 kW,位于艏推力器室。艉方位推力器的額定功率為2 500 kW,位于機(jī)艙底層。另外裝有2套管道推力器。艏管道推力器的額定為3 100 kW,位于艏推力器室。艉管道推力器的額定功率為2 200 kW,位于艉部。
該船可進(jìn)行定位能力在線分析。定制控制器增益選擇,可允許操作員執(zhí)行定制設(shè)置控制器的增益級(jí);吃水補(bǔ)償,可自動(dòng)調(diào)整船的數(shù)學(xué)模型和實(shí)際吃水;預(yù)設(shè)通風(fēng)功能,可使操作員選擇預(yù)設(shè)的通風(fēng)條件;吃水傳感器,可不斷讀取船的吃水狀態(tài);運(yùn)動(dòng)預(yù)測(cè),可進(jìn)行在線分析(使用傳感器數(shù)據(jù))和離線分析(操作員指定數(shù)據(jù))等。
該船的動(dòng)力定位能力為:在浪高5 m、波浪周期為8.6 s、風(fēng)速為20.5 m/s、流速為1.1 m/s的情況下,最嚴(yán)重的情況是當(dāng)1組設(shè)備或系統(tǒng)發(fā)生故障時(shí)發(fā)生故障。典型的單點(diǎn)故障為:關(guān)鍵推力器失效,1套推力器組發(fā)生故障,1段電源母排發(fā)生故障。保持船舶與風(fēng)和流的夾角在20°以內(nèi)。
3.2 動(dòng)力定位系統(tǒng)的基本操作模式
該船的動(dòng)力定位系統(tǒng)有操縱桿模式、自動(dòng)艏向模式、混合操作桿/自動(dòng)模式、自動(dòng)定位模式、自動(dòng)操舵模式、自動(dòng)循跡航行(低速與高速)、自動(dòng)保持移動(dòng)速度和任意中心自動(dòng)回轉(zhuǎn)等8種操作模式,船舶航行或工作時(shí),根據(jù)實(shí)際需要實(shí)時(shí)選擇適宜的操作模式。
3.3 通過動(dòng)力定位系統(tǒng)實(shí)現(xiàn)的特殊裝載功能
該船可通過動(dòng)力定位系統(tǒng)實(shí)現(xiàn)以下功能:
1)海上裝油,通過艏裝載系統(tǒng)從FPSO上裝入貨油,到離岸卸貨點(diǎn)卸載貨油;
2)單點(diǎn)系泊,船舶通過單點(diǎn)形式系泊在另一個(gè)固定式或浮式結(jié)構(gòu)物上,圍繞該結(jié)構(gòu)物隨風(fēng)、浪、流360°回轉(zhuǎn),在風(fēng)標(biāo)效應(yīng)的作用下停泊在環(huán)境力最小的方位上;
3)不系泊裝油浮筒,抵消固定端點(diǎn)附近的風(fēng)標(biāo)效應(yīng),使船舶圍繞裝油浮筒作規(guī)定角度的擺動(dòng);
4)串聯(lián)裝載,F(xiàn)PSO(Floating Production Storage and Offloading)/FSU(Floating Storage Unit)艉部的裝載連接處保持連接,并抵消風(fēng)標(biāo)效應(yīng),實(shí)現(xiàn)海工裝置間的貨油輸送。
4 結(jié) 語
船舶動(dòng)力定位系統(tǒng)具有操作方便、精度高和定位準(zhǔn)等優(yōu)點(diǎn),隨著船舶與海洋工程的不斷發(fā)展,該系統(tǒng)必將得到廣泛應(yīng)用,目前越來越多的工程船和軍用輔助艦船開始配備該系統(tǒng)。該系統(tǒng)能大大提高船舶的遠(yuǎn)洋作業(yè)能力,但高昂的價(jià)格限制了其在普通船舶上的應(yīng)用。相信隨著人們對(duì)海洋活動(dòng)的需求越來越多,該系統(tǒng)會(huì)逐漸朝著人性化、易操作化的方向發(fā)展。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45