傾斜攝影測量擴展航線中冗余影像的剔除方法
2021-11-16 11:03:06徐昀鵬陳潤華
智能城市 2021年19期
王 堅 徐昀鵬 陳潤華
(廣東南方數碼科技股份有限公司,廣東廣州 510665)
傾斜攝影測量技術具有數據獲取效率高、成果精度高和紋理逼真等優點,隨著近幾年的快速發展,目前已成為獲取地理空間信息的重要手段之一,廣泛應用于測繪、規劃、水利、文保等領域[1-7]。但由于傾斜攝影測量技術從多個視角獲取目標影像,影像數據量巨大,遠超傳統攝影測量,在內業數據處理時需要消耗大量的時間和高規格硬件資源[8]。影像的數據量直接影響內業數據處理的效率,目前主流的生產作業流程中尚未有對冗余影像剔除的環節,需要對所有獲取的影像進行處理,對內業數據處理的效率提出了更高要求。文獻[9]、文獻[10]基于共線方程反算式,提出了一種通過計算每張相片覆蓋的地面范圍剔除冗余影像的方法,該方法理論嚴密,能較好剔除未拍到測區的無效相片,但其方法要求有測區的DEM數據,在實際作業中通常并不具備,且方法中含有大量迭代計算,處理的時間效率較低。文獻[11]提出一種基于空中三角測量稀疏點云構建粗略表面模型的影像篩選方法,減少了參與建模的影像,提高了建模的效率,但是該方法只面向建模環節,不能提升空中三角測量的效率。本文針對傾斜攝影中存在冗余影像最多的地方——擴展航線,提出了基于影像攝影方向剔除冗余影像的方法,以提升內業數據處理效率,降低生產成本。
1 存在的問題
在傾斜攝影測量的航飛作業過程中,為了保證測區地物紋理的全覆蓋,需要向測區外擴展若干航線來拍攝測區內地物的側面紋理,但由于相機攝影方向的原因,導致獲取的影像含有大量拍攝測區外的冗余影像。擴展航線上大量冗余影像的存在,降低了內業數據處理效率,加大了數據處理難度和空中三角測量分層概率,增加了生產的成本。
擴展航線如圖1所示,冗余影像如圖2所示。

圖1 擴展航線

圖2 冗余影像
2 方法
2.1 數據準備
查看待處理的照片是否具有完整的外方位元素(XS,YS,ZS,ω,φ,κ),沒有則需要先進行空中三角測量,得到每張照片的外方位元素。
2.2 劃定測區范圍
用多邊形確定測區范圍,多邊形節點集合為{V1,V2,V3,…,Vn},n為多邊形節點個數。此步驟可在奧維互動地圖、谷歌地球或圖新地球等地圖軟件中完成。
總體技術流程如圖3所示。
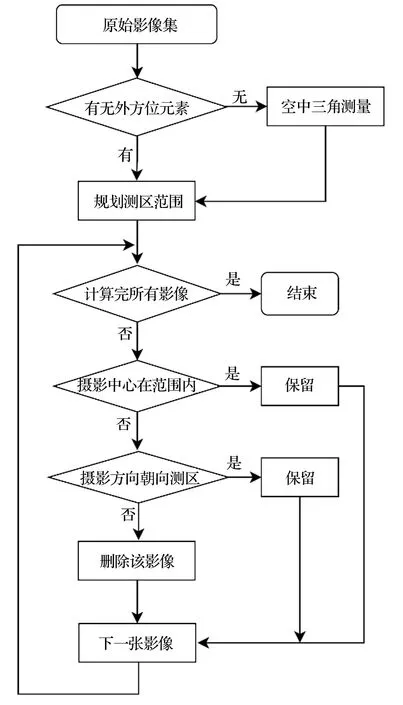
圖3 總體技術流程
2.3 篩選出擴展航線上的照片
篩選擴展航線上的照片,僅需要判斷每張照片的攝影中心在地面的投影坐標(XS,YS)是否在測區多邊形內即可。考慮測區范圍線為手工繪制的簡單多邊形,判斷點在面內的算法采用射線法即可滿足實際應用。
射線法[12]判斷點面拓撲關系如圖4所示。

圖4 射線法判斷點面拓撲關系
由點所在平面豎直向上引一條射線,判斷射線與多邊形的交點個數,若交點數為奇數,則點在多邊形范圍內,若為偶數則在多邊形外。
2.4 計算照片攝影方向
對于擴展航線上照片,只需要保留攝影方向朝向測區的部分即可,因此需要計算擴展航線上每張照片在攝影瞬間的朝向,如圖5所示。

圖5 照片的攝影方向
設攝影中心S在鉛錘方向的單位向量為分別圍繞X軸、Y軸、Z軸進行三次旋轉,得到實際攝影瞬間攝影主光軸的

2.5 判斷照片攝影方向是否朝向測區

圖6 判斷射線與多邊形的關系
分別計算i=1,2,3,…,n時的θ1、θ2、θ12的值:

若存在i使θ1與θ2之和等于θ12,則射線NP與多邊形相交,停止對i的遍歷;若不存在i使θ1+θ2=θ12,則射線NP與多邊形不相交。對于下視方向的照片,攝影光束并不嚴格鉛錘,上述判斷方法會存在誤判,若'的Z軸分量的絕對值大于0.9,即認為該照片為下視方向的照片,非朝向測區,予以剔除。
3 試驗對比
本文基于Context Capture中導出的xml格式的工程信息文件,采用Visual Basic編程語言對本方法進行了實現。試驗計算機主要配置:CPU為i7 4790K,顯卡為GTX 980,RAM32 GB,空中三角測量軟件為Context Capture 4.4.10。
試驗包含三種類型的航飛數據,分別來自大疆Mavic 2 Pro、致睿ZR60和大疆經緯M300 RTK,大疆Mavic 2 Pro為單鏡頭作業方式,其余為五鏡頭作業方式。
經本文所述方法處理后,單鏡頭作業方式中,傾斜拍攝航線兩端的照片,只保留了一端,另一端則作為冗余照片被剔除;五鏡頭數據擴展航線上朝向測區的照片得到保留,其余方向均被剔除。
三種數據的航線分布與測區范圍如圖7所示,處理后照片分布情況如圖8所示,處理后效率提升與數據精簡情況如表1所示。

表1 處理后效率提升與數據精簡情況

圖7 航線分布與測區范圍
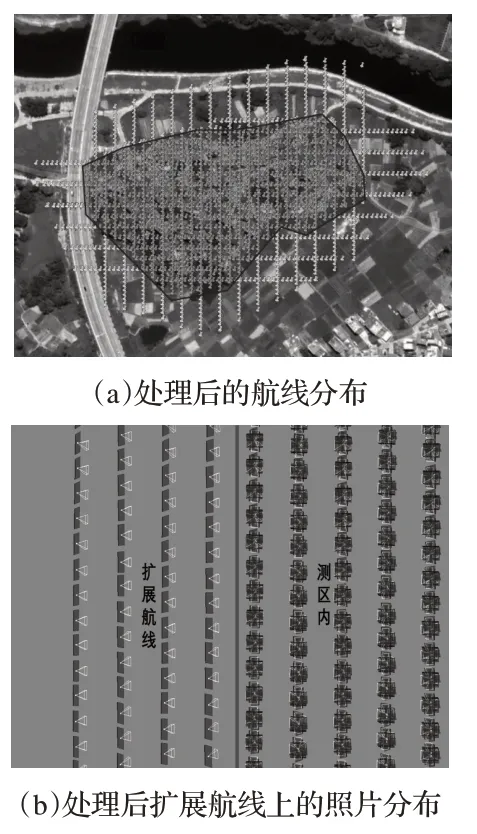
圖8 處理后照片分布情況
由表1可知,五鏡頭作業方式擴展航線上的數據冗余程度要明顯大于單鏡頭,三種航飛數據經處理后空中三角測量效率提升了40%以上,同時減少了20%以上的照片數量。
4 結語
本文提出了一種基于影像攝影方向來剔除擴展航線上冗余影像的方法。經三組試驗對比,該方法可降低20%以上的影像數量,提升40%以上的空中三角測量效率。本文所述的方法可顯著提升傾斜攝影測量的內業處理效率,降低數據生產成本,在大規模的傾斜攝影測量項目中具有重要的應用價值。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
兒童故事畫報(2019年5期)2019-05-26 14:26:14
商周刊(2017年9期)2017-08-22 02:57:49
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32