AUV水下對接系統(tǒng)設(shè)計(jì)與接駁控制方案研究
2021-11-16 03:37:44辛傳龍
工程設(shè)計(jì)學(xué)報(bào) 2021年5期
辛傳龍,鄭 榮,楊 博
(1.中國科學(xué)院沈陽自動化研究所機(jī)器人學(xué)國家重點(diǎn)實(shí)驗(yàn)室,遼寧沈陽 110016;2.中國科學(xué)院機(jī)器人與智能制造創(chuàng)新研究院,遼寧沈陽 110169;3.中國科學(xué)院大學(xué),北京 100049)
水下對接是自主水下機(jī)器人(autonomous underwater vehicle,AUV)自主布放與回收的重要環(huán)節(jié)。在過去三四十年間,AUV水下對接技術(shù)得到很大發(fā)展。對接裝置按照其結(jié)構(gòu)形式可分為坐落平臺型、繩桿型和導(dǎo)向罩型[1]。在魚雷形AUV動對接應(yīng)用場景下,坐落平臺型的結(jié)構(gòu)已被逐漸淘汰;采用繩桿型的結(jié)構(gòu),能夠?qū)崿F(xiàn)AUV水下360°全方位對接[2],可降低AUV航跡規(guī)劃的控制要求;導(dǎo)向罩型的結(jié)構(gòu)因其容錯率高、充電與數(shù)據(jù)傳輸功能易于集成等優(yōu)勢,得到廣泛應(yīng)用。
根據(jù)對接裝置在AUV對接過程中的運(yùn)動和被操縱狀態(tài),可將水下對接形式分為靜對接、懸停對接、移動對接、懸浮對接和拖曳動對接。靜對接裝置通常配置在海底預(yù)置系統(tǒng)上或單獨(dú)布放在大陸架上,作為AUV在海底的固定“加油站”和信息中轉(zhuǎn)站。美國蒙特利海洋研究所[3]、中國的浙江大學(xué)和哈爾濱工程大學(xué)[4-5]等相關(guān)研究機(jī)構(gòu)都研究了在“金字塔”形底座上配置喇叭口導(dǎo)向罩型對接裝置的靜對接形式,并成功完成AUV水下對接試驗(yàn)。常見的潛艇馱載回收AUV的方式[6],則屬于典型的懸停對接和移動對接形式。其與懸浮對接和拖曳動對接不同的是,對接裝置自身能夠主動對抗與AUV對接碰撞以及海流帶來的擾動。Liu、鄭榮等[7-8]基于某重型AUV和可操縱移動對接裝置,分別采用聲學(xué)和光學(xué)導(dǎo)引技術(shù),成功實(shí)現(xiàn)懸停和移動對接。類比于海洋船舶工程系泊和錨泊系統(tǒng)的定義[9],將懸浮對接定義為:對接裝置由具有一定長度的繩索束縛在另一固定或浮式結(jié)構(gòu)物(如大陸架、母船、浮標(biāo)、海上石油平臺等)上,在對接過程中,裝置自由懸浮,不受任何主動操縱力控制。拖曳動對接與懸浮對接類似,只是拖曳動對接時(shí)對接裝置一般束縛在移動平臺(如水面母船、無人艇)上。拖曳動對接由海洋深拖系統(tǒng)形式演變而來,被廣泛應(yīng)用于水面平臺AUV的布放與回收。
現(xiàn)有的針對AUV水下對接過程的研究,主要對靜對接中接駁碰撞過程的影響因素進(jìn)行分析[5,10],相關(guān)的結(jié)構(gòu)優(yōu)化也是基于靜對接應(yīng)用場景的[11-12],尚無針對懸浮對接和拖曳動對接的接駁運(yùn)動規(guī)律的研究。同樣,關(guān)于水下接駁控制策略的研究,主要集中在如何規(guī)劃對接路徑以及如何通過有效的控制算法使AUV跟蹤所規(guī)劃的路徑[1]。對于AUV入塢的最后階段,一般都規(guī)定了恒定的對接速度。而文獻(xiàn)[13]指出,對接速度是影響對接成功率的重要因素,因此有必要對AUV對接的前向運(yùn)動控制方案作更充分的研究。
為實(shí)現(xiàn)水面無人艇自主部署AUV,針對現(xiàn)有導(dǎo)向罩型對接裝置結(jié)構(gòu)的局限性,提出一種新型水下開合對接裝置。根據(jù)裝置的結(jié)構(gòu)形式,制定靜對接、懸浮對接和拖曳動對接三種應(yīng)用場景下的接駁控制方案。通過對各應(yīng)用場景下AUV對接過程的動力學(xué)簡化分析,利用ADAMS(automatic dynamic analysis of mechanical system,機(jī)械系統(tǒng)動力學(xué)自動分析)和MATLAB軟件建立水下接駁控制的仿真環(huán)境,并對不同對接形式的接駁控制方案進(jìn)行仿真分析和對比。
1 新型AUV水下開合對接系統(tǒng)
1.1 開合對接方案
水面無人艇自主部署AUV一體化系統(tǒng)針對多海洋平臺協(xié)同協(xié)作發(fā)展的需求應(yīng)運(yùn)而生[14],在水面無人艇下拖曳體自主收放裝置[15]的基礎(chǔ)上改進(jìn)而成。其主要由水面無人艇、布放與回收裝置(固聯(lián)在水面無人艇甲板上)、開合對接裝置組成,后兩者之間由拖纜連接,共同組成一套完整的拖曳式布放與回收系統(tǒng),如圖1所示。
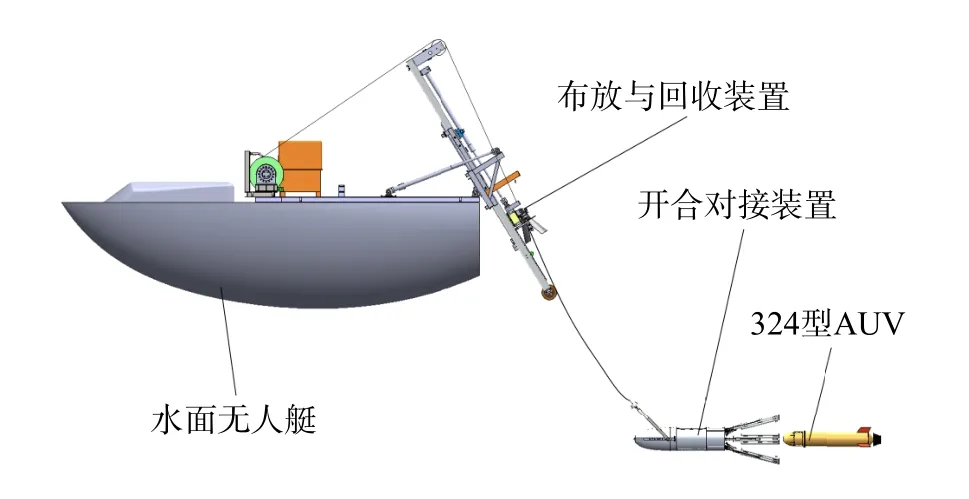
圖1 水面無人艇自主部署AUV一體化系統(tǒng)Fig.1 Integrated system for AUV autonomous deployment of surface unmanned vehicle
為了實(shí)現(xiàn)水面無人艇自主部署AUV,筆者設(shè)計(jì)了一套適用于靜對接、懸浮對接和拖曳動對接應(yīng)用場景的水下開合對接裝置(以下簡稱為“Dock”),用于水下對接324型AUV。AUV水下開合對接裝置的結(jié)構(gòu)如圖2所示。

圖2 AUV水下開合對接裝置的結(jié)構(gòu)Fig.2 Structure of AUV underwater opening and closing docking device
Dock主要由拖架、電子艙、框架、開合機(jī)構(gòu)、導(dǎo)向罩和傳感設(shè)備等組成。其中傳感設(shè)備主要由陀螺儀、超短基線(ultra-short baseline,USBL)和到位開關(guān)組成。艙艏外形光順,導(dǎo)向罩合攏后,Dock周身呈圓柱形。這種規(guī)則的幾何外形與滑道式布放與回收方式非常匹配,有助于實(shí)現(xiàn)AUV布收流程的自動化。導(dǎo)向罩打開后,Dock呈對稱的傘狀,具有良好的水動力特性。密閉的電子艙主要用來放置Dock的控制系統(tǒng)以及小型液壓站。除此之外,為提高AUV被動導(dǎo)向效率,將傳統(tǒng)的固定罩導(dǎo)引方式改為動態(tài)開合導(dǎo)引方式。隨著導(dǎo)向罩的合攏,AUV逐漸被約束,并被限位滑塊和卡爪夾緊,以進(jìn)一步進(jìn)行水下非接觸式充電、數(shù)據(jù)傳輸及回收等工作。該方案要求324型AUV艏部段感應(yīng)式充電環(huán)所在位置設(shè)計(jì)成凸起形狀,以最大限度地保留AUV的光順外形,又便于卡爪鉗住AUV。AUV對接成功狀態(tài)如圖3所示。
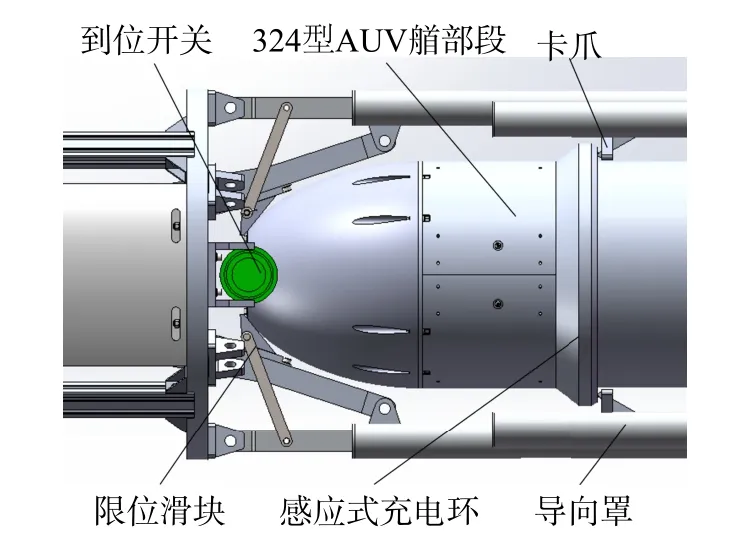
圖3 AUV對接成功狀態(tài)示意Fig.3 Schematic of successful AUV docking
在AUV水下對接過程中,Dock控制系統(tǒng)的規(guī)劃和決策依賴于傳感器系統(tǒng)所感知的外部環(huán)境信息。該系統(tǒng)采用USBL聲導(dǎo)引方式,根據(jù)回聲定位解算獲悉AUV位姿。陀螺儀用于單獨(dú)監(jiān)測Dock的姿態(tài)信息,用于反饋控制。到位開關(guān)反饋的邏輯信號既是對接是否成功的判斷標(biāo)志,也作為導(dǎo)向罩合攏的觸發(fā)信號。
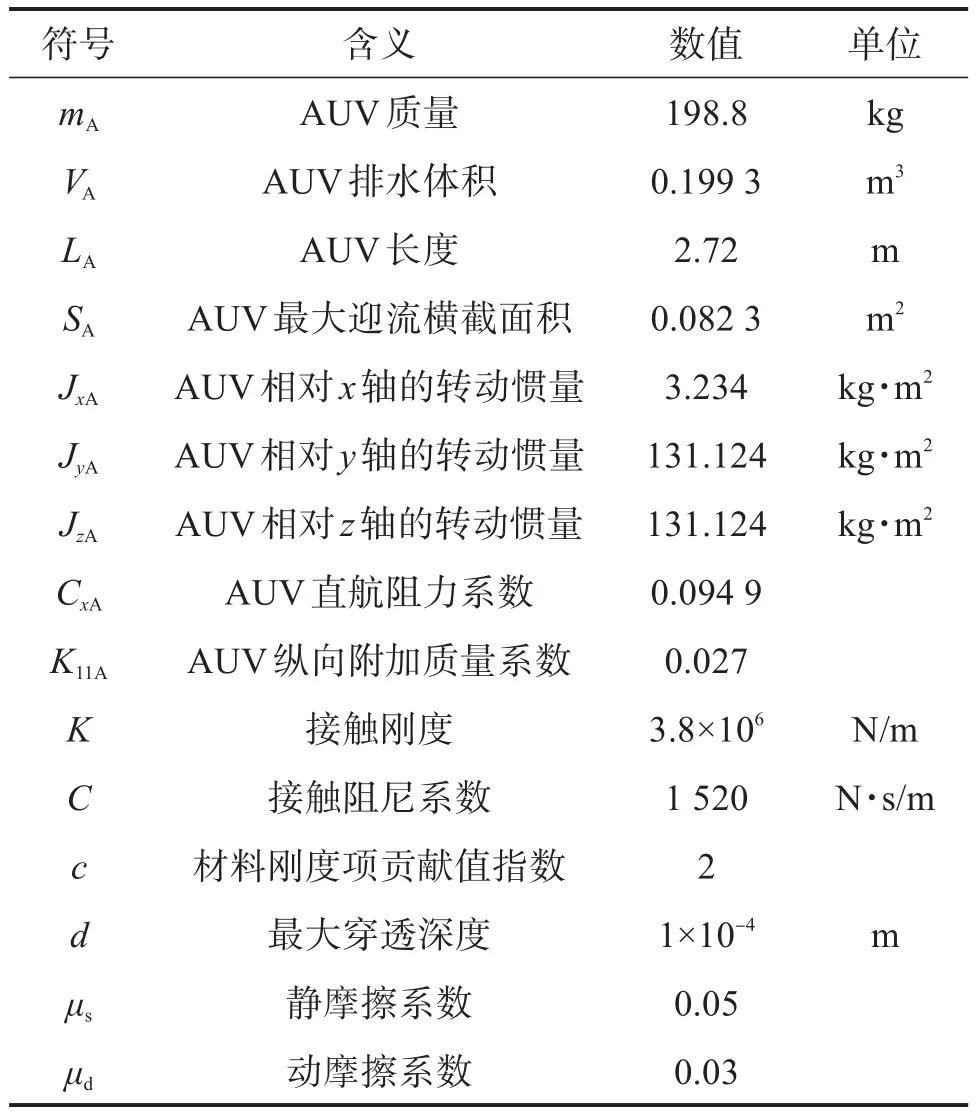
如圖2所示,Dock的理論拖點(diǎn)位置D在裝置縱中垂面上,設(shè)D-xyz為裝置的隨體坐標(biāo)系(z軸與x、y軸滿足右手定則,圖中未標(biāo)出)。Dock的結(jié)構(gòu)參數(shù)如表1所示。

表1 Dock的結(jié)構(gòu)參數(shù)Table 1 Structural parameters of Dock
1.2 開合對接流程
在AUV水下對接過程中,如果導(dǎo)向罩合攏的時(shí)機(jī)不合適,會導(dǎo)致AUV艏部段的感應(yīng)式充電環(huán)卡在卡爪之外,造成對接失敗。因此,制定了開合對接流程,如圖4所示。該流程可用于靜對接、懸浮對接和拖曳動對接。其中:L為USBL聲導(dǎo)引解算的AUV與Dock之間的距離;LE1、LE2、LE3分別為控制開合對接流程走向的期望距離,滿足LE1>LE2≥LE3;αp為導(dǎo)向罩張角。對接流程規(guī)劃從AUV結(jié)束航路點(diǎn)導(dǎo)引,執(zhí)行直線跟蹤任務(wù)開始。當(dāng)聲導(dǎo)引解算出L≤LE1時(shí),AUV開始執(zhí)行最后階段的對接入塢指令;當(dāng)L≤LE2時(shí),Dock的液壓缸推動開合機(jī)構(gòu)合攏導(dǎo)向罩;隨著αp趨近于0°,液壓缸走完一個行程,若此時(shí)到位開關(guān)檢測到AUV就位,說明對接成功,否則,Dock張開導(dǎo)向罩,等待AUV二次入塢。
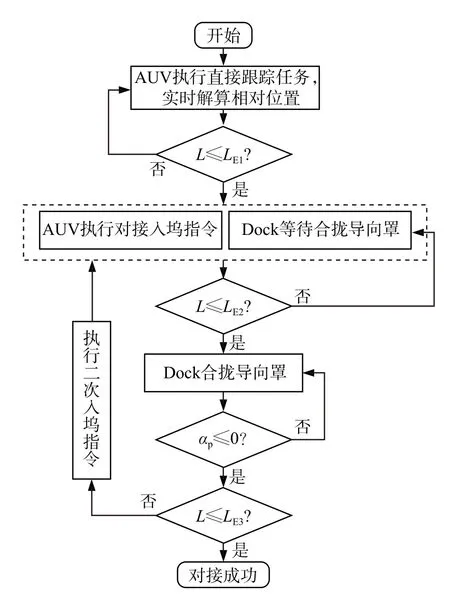
圖4 AUV開合對接流程Fig.4 AUV opening and closing docking process
值得一提的是,由于對接碰撞不可避免,AUV入塢時(shí)縱向運(yùn)動控制方案的優(yōu)劣將決定AUV完成對接任務(wù)所需要的時(shí)間。基于開合對接裝置的結(jié)構(gòu)特征,對AUV執(zhí)行對接入塢指令階段的運(yùn)動提出以下控制要求:1)避免AUV碰撞后反彈距離過大,反彈后應(yīng)盡快實(shí)現(xiàn)L≤LE3;2)對接過程中消耗的能量應(yīng)盡可能少,避免出現(xiàn)推進(jìn)器高速運(yùn)轉(zhuǎn)而AUV前向速度仍為0 m/s的空轉(zhuǎn)狀態(tài);3)在懸浮對接工況下,避免Dock因與AUV碰撞造成相對初始平衡位置偏移過大;4)在拖曳動對接工況下,AUV須具備良好的跟隨特性。
接下來,通過建立簡化的AUV對接系統(tǒng)的動力學(xué)仿真模型來研究AUV在對接過程中的前向運(yùn)動控制方案。
2 AUV對接系統(tǒng)的動力學(xué)仿真模型
為了搭建AUV入塢過程的仿真環(huán)境,須對對接過程中AUV多剛體動力學(xué)模型進(jìn)行深入分析。考慮到本研究是為了探究更高效的適用于開合對接系統(tǒng)的AUV接駁控制方案,且在AUV入塢階段其前向運(yùn)動起主導(dǎo)作用,所以對該動力學(xué)模型作如下簡化:
1)AUV入塢前的直線跟蹤軌跡與Dock中軸線重合;
2)在懸浮對接和拖曳動對接工況下,忽略Dock因碰撞而偏離初始平衡位置造成的縱傾角的微小變化;
3)水下對接中不考慮水底暗流的干擾;
4)在對接過程中AUV低速航行,舵效不明顯,只考慮主推進(jìn)器作用下AUV的運(yùn)動;
5)忽略在低速對接下AUV與導(dǎo)向罩之間的流場壁面效應(yīng);
6)對接過程中接觸部件均視為剛體。
2.1 AUV對接系統(tǒng)受力分析
在水下對接過程中,AUV受到重力FGA、浮力FBA、主推力T、水動力FWA和碰撞力FC的作用,Dock同樣受到重力FGD、浮力FBD、纜繩拉力FD(分解為FxD和FyD)、水動力FWD和碰撞力FC’的作用。因AUV和Dock的外形基本呈中心對稱,忽略水動力FWD對運(yùn)動剛體產(chǎn)生的附加水動力矩。綜上,在靜對接、懸浮對接和拖曳動對接工況下對AUV對接系統(tǒng)進(jìn)行受力分析,如圖5所示。為方便描述AUV和Dock的運(yùn)動和受力,建立固定坐標(biāo)系E-xyz和2個隨體坐標(biāo)系B-xyz和D-xyz。兩隨體坐標(biāo)系的原點(diǎn)分別選為AUV的浮心B和Dock的拖點(diǎn)D,x軸均與各自縱軸重合并指向前方,y軸垂直于x軸指向上方,z軸指向滿足右手定則。
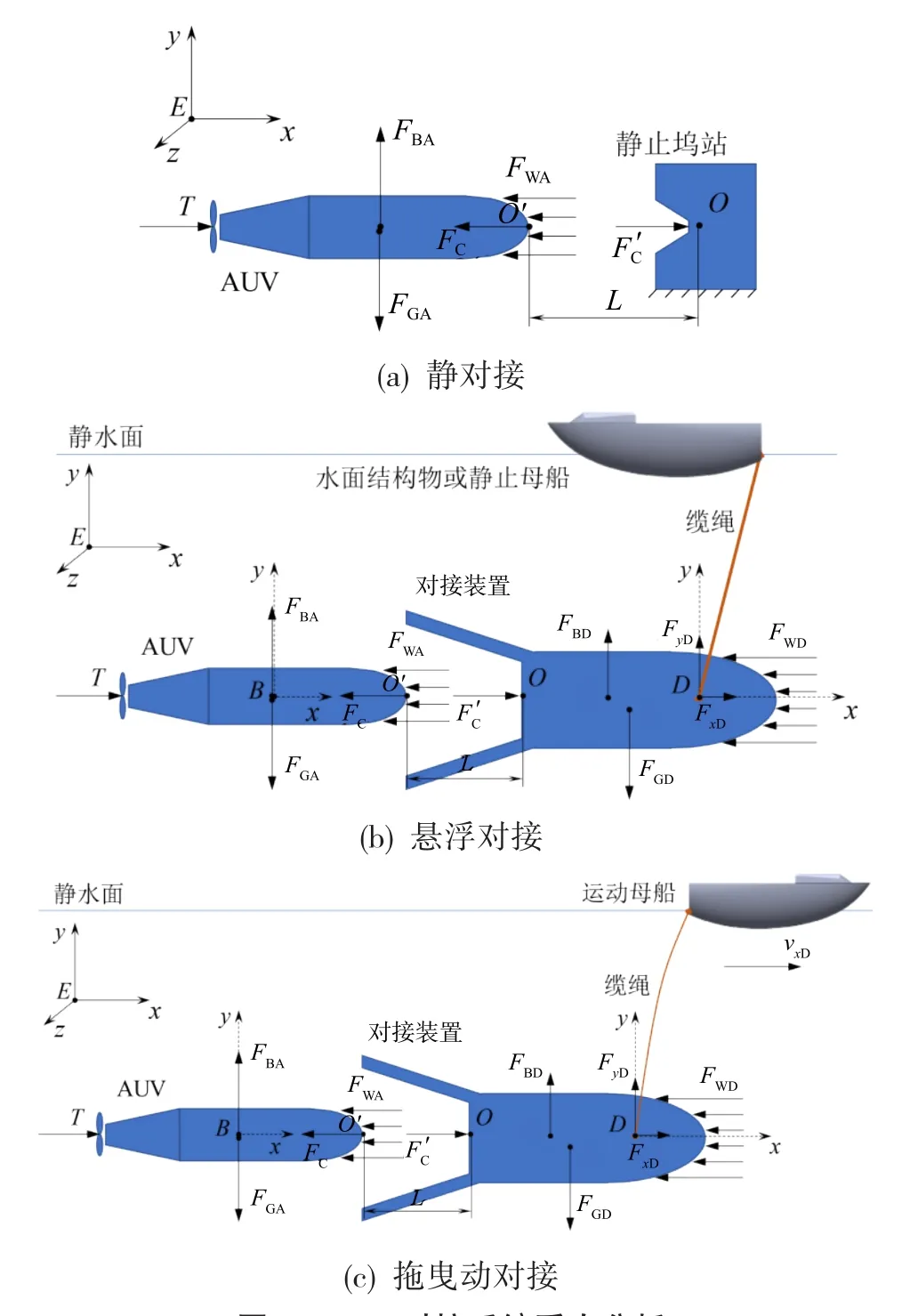
圖5 AUV對接系統(tǒng)受力分析Fig.5 Stress analysis of AUV docking system
水下剛體垂直面的運(yùn)動方程式為[16]:
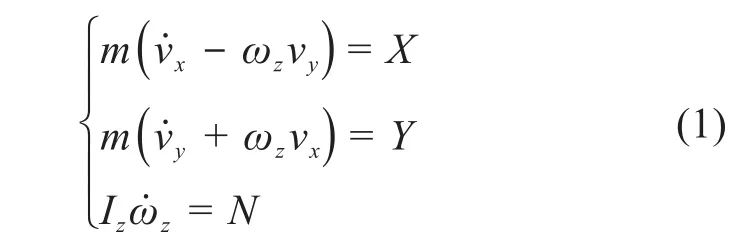
式中:X、Y、N分別為水下剛體在x、y向的合外力和z向的合外力矩;m為水下剛體的質(zhì)量;vx、vy分別為水下剛體在x、y向的速度分別為水下剛體在x、y向的加速度;ωz為水下剛體在z向的角速度為水下剛體在z向的角加速度;Iz為水下剛體在z向的轉(zhuǎn)動慣量。
隨體坐標(biāo)系D-xyz的原點(diǎn)D與Dock的重心不重合,假設(shè)AUV的質(zhì)心、浮心重合,聯(lián)立AUV和Dock的垂直面運(yùn)動方程,可得AUV對接系統(tǒng)的簡化動力學(xué)方程為:
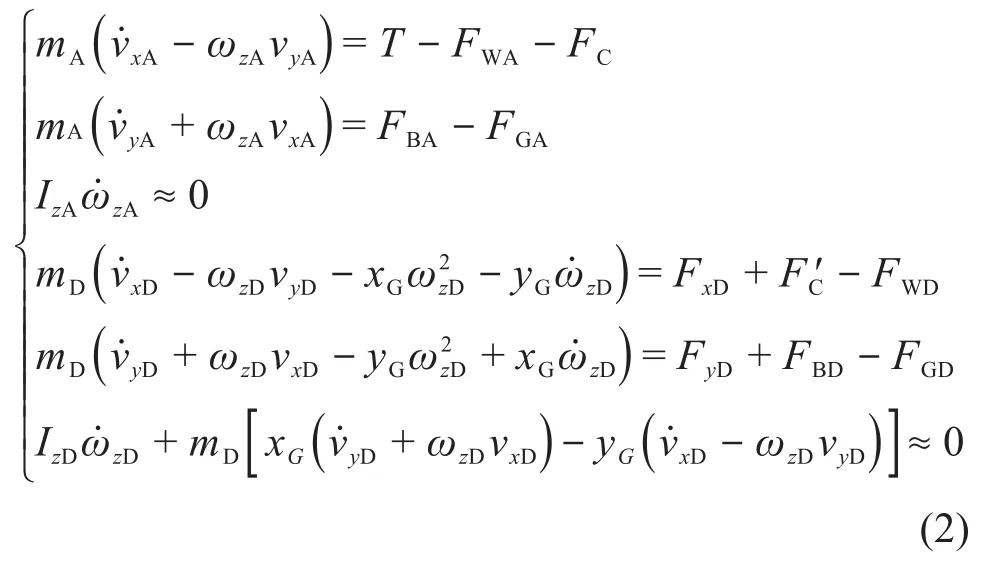
式中:下標(biāo)“A”表示是AUV的物理量,下標(biāo)“D”表示是Dock的物理量,符號含義與式(1)相同。下同。
為求解對接過程中AUV和Dock的運(yùn)動狀態(tài),須知各外力的表達(dá)式,故重點(diǎn)研究AUV和Dock水下運(yùn)動所受的水動力和接觸產(chǎn)生的碰撞力。
2.2 水動力建模
物體在水中作非定常運(yùn)動所受的水動力主要由兩部分組成:由速度引起的流體黏性力和由加速度引起的流體慣性力。因此,可將直航的水下剛體所受的水動力FW表示為:

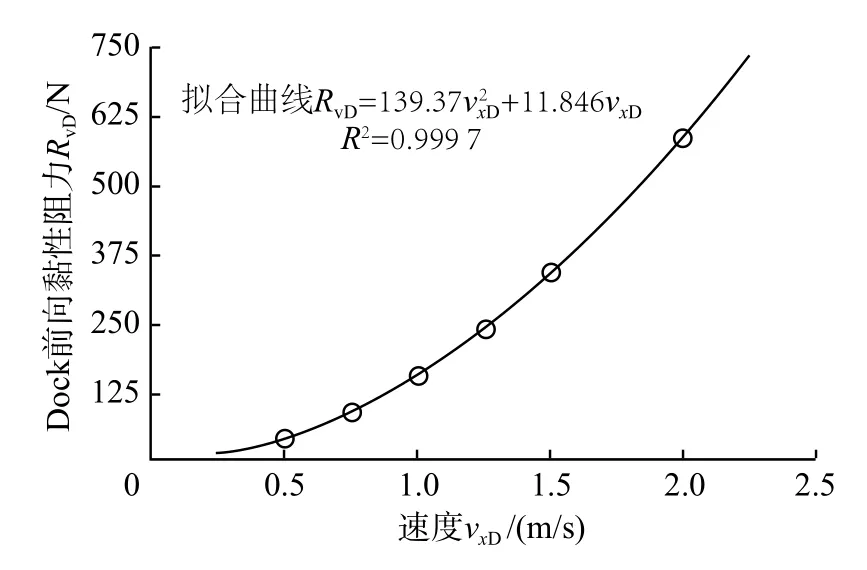
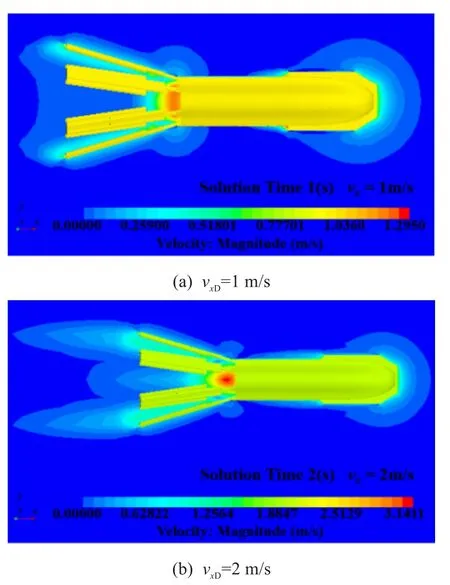
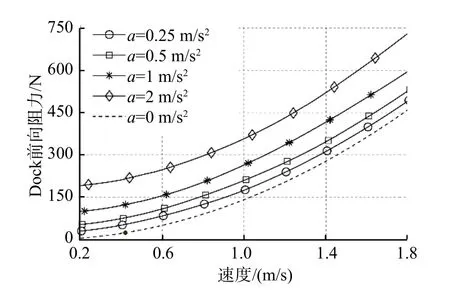
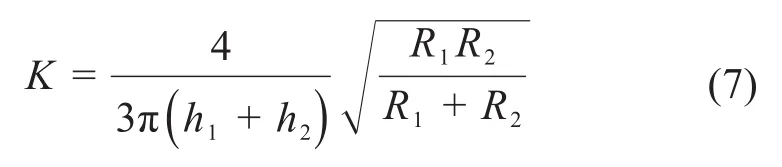
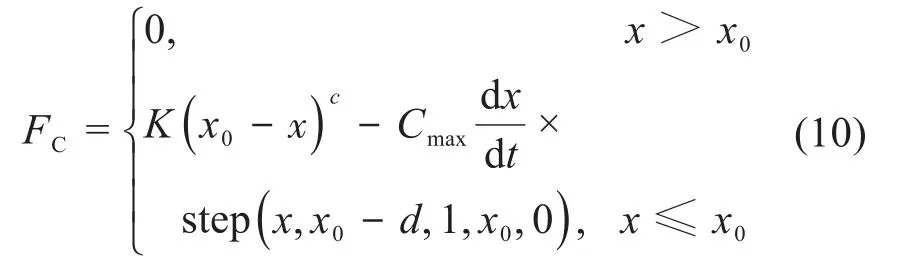
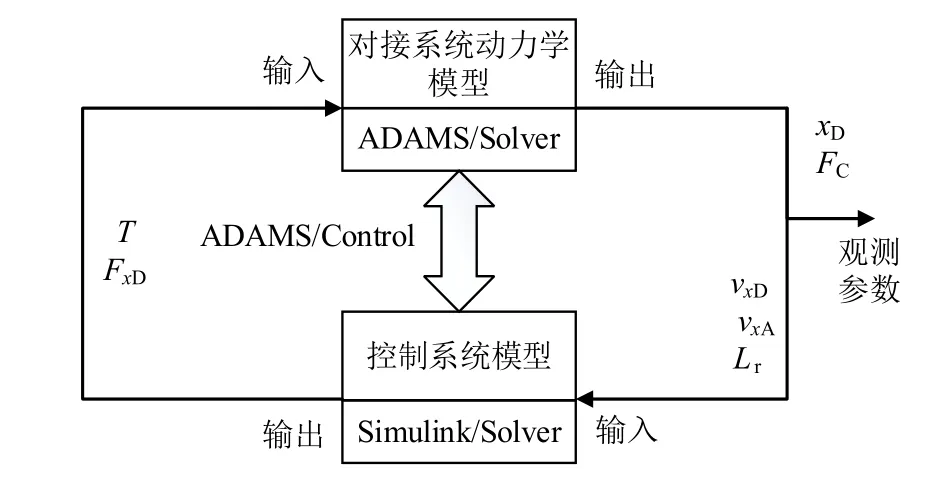
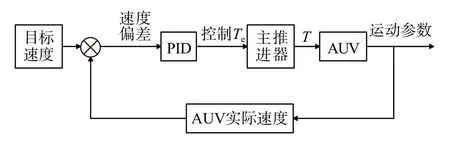
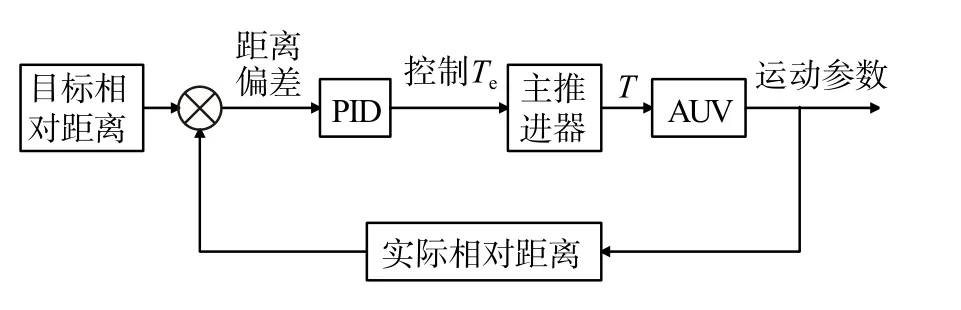
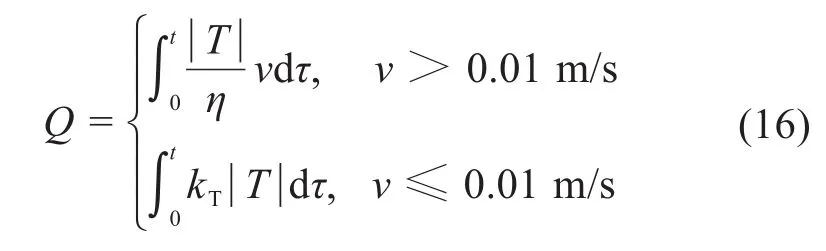
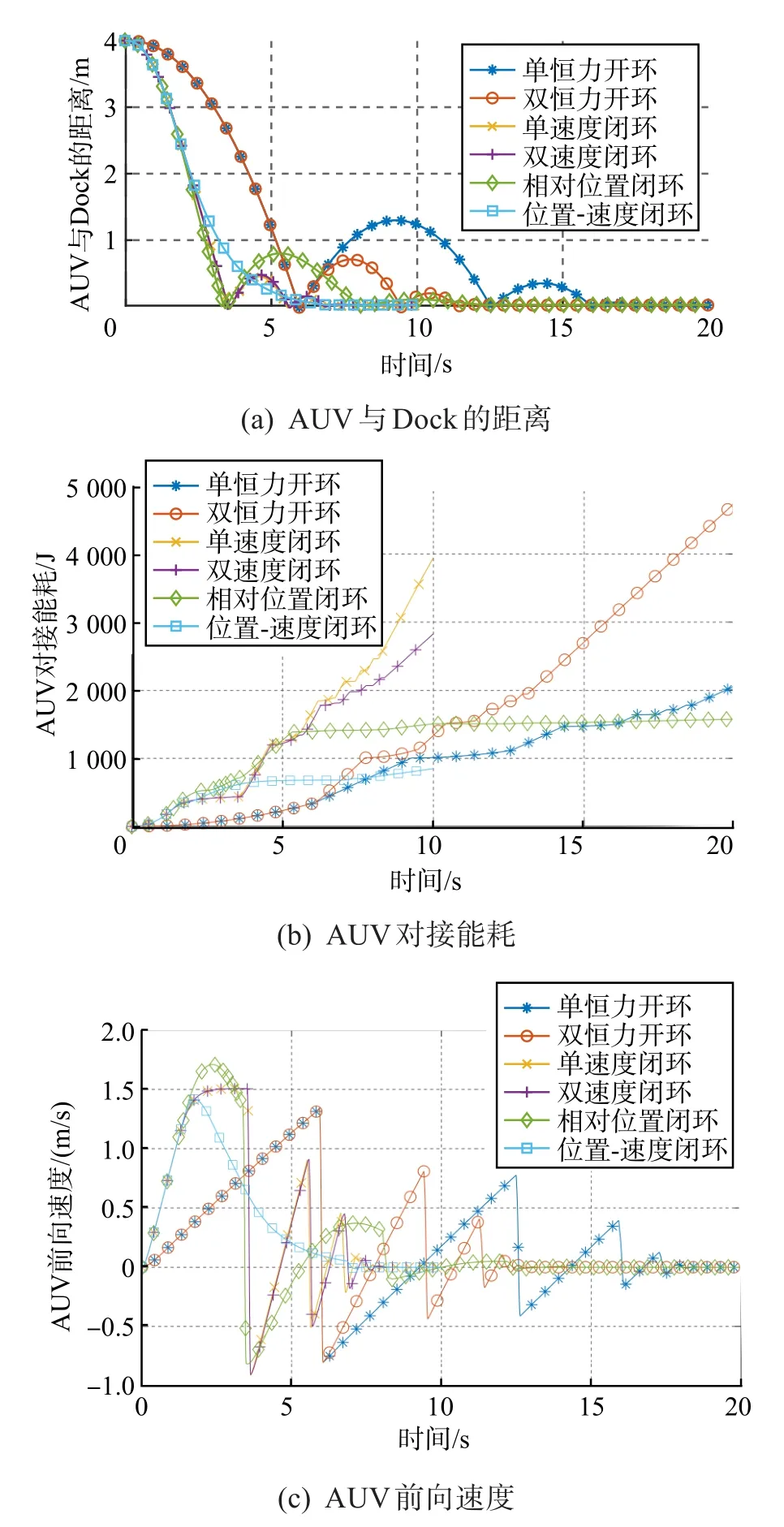
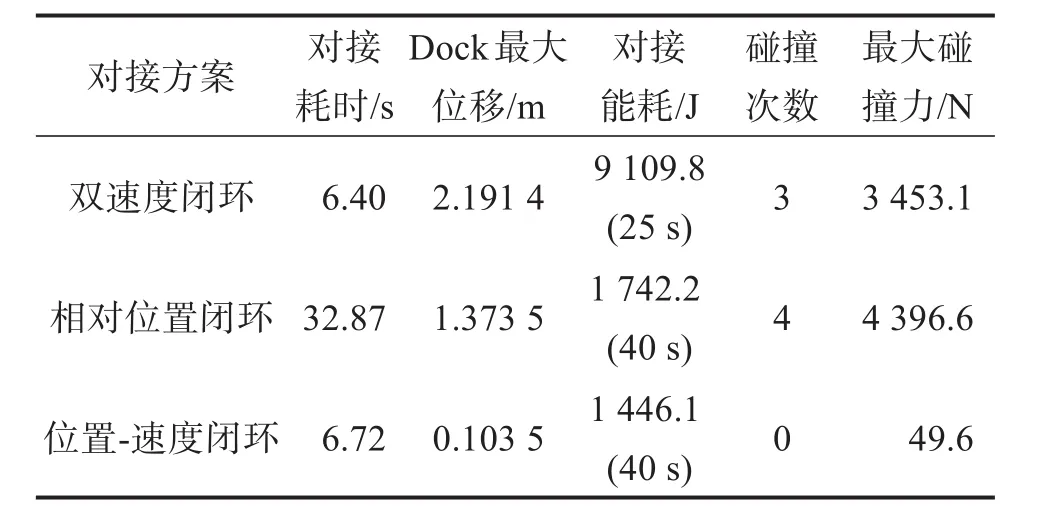
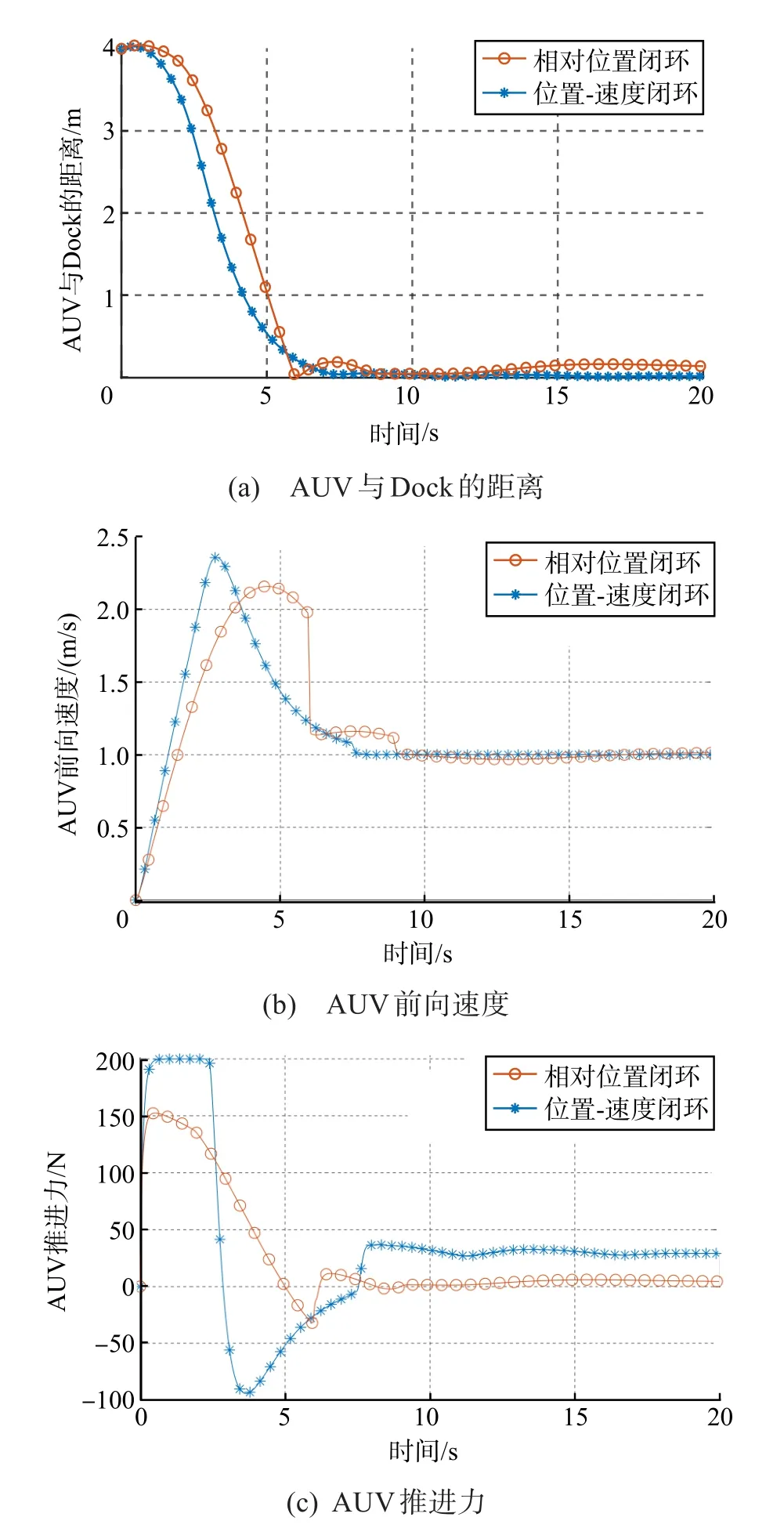
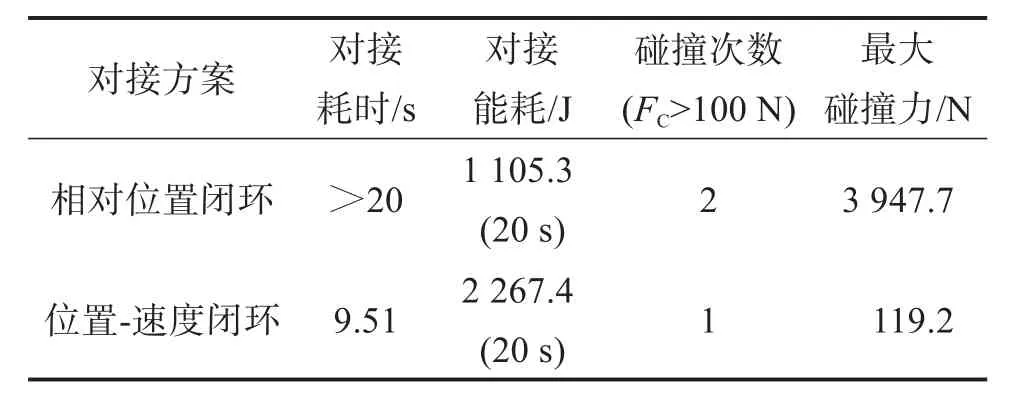
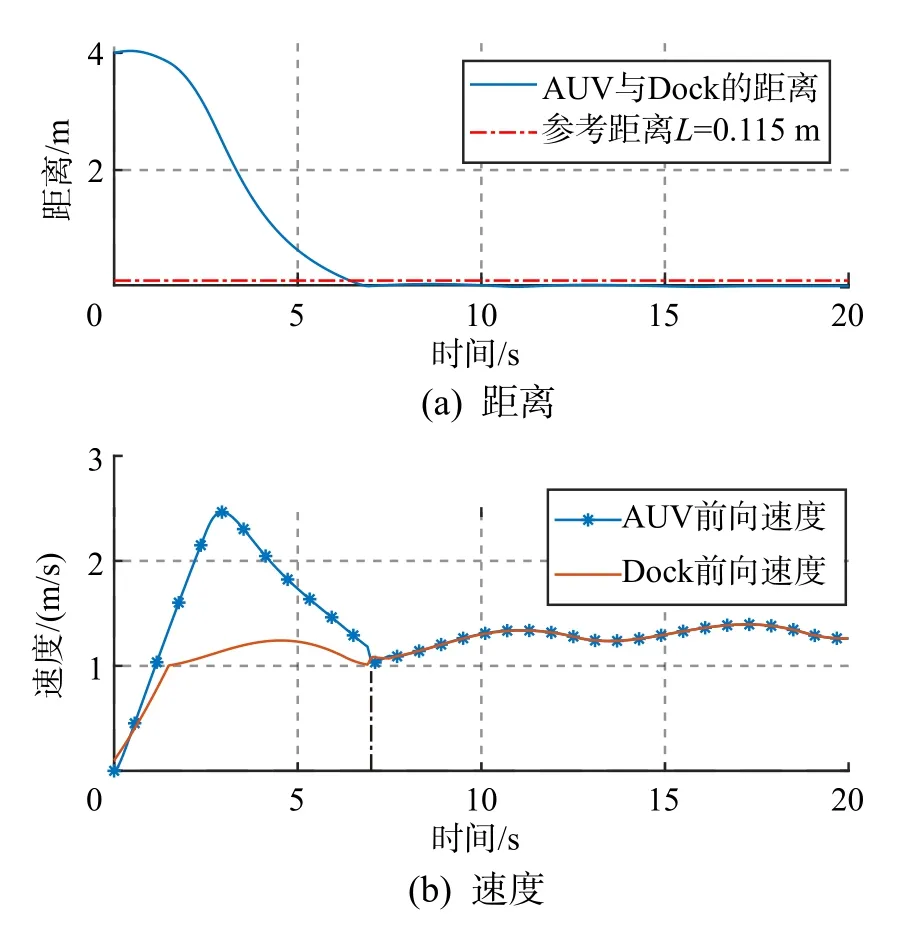
式中:Rv為水下剛體因前向均速運(yùn)動引起的流體黏性阻力,主要包含黏性剪切力和黏性壓差阻力;Ri為水下剛體因前向運(yùn)動速度變化引起的流體慣性力。在一般情況下,Rv 式中:ρ為水的密度,取997.561 kg/m3;v為水下剛體的運(yùn)動速度;S為水下剛體最大迎流橫截面積;Cx為水下剛體的阻力系數(shù)。 由于AUV和Dock的外形基本呈上下對稱,根據(jù)勢流理論以及流體慣性力的基本概念,可將近似直航的AUV和Dock所受的流體慣性力表示為: 式中:λ11為附加質(zhì)量系數(shù),常以無量綱的附加質(zhì)量因數(shù)K11表示,其中V為水下剛體的排水體積。 在工程領(lǐng)域,常借助CFD(computational fluid dynamics,計(jì)算流體力學(xué))方法計(jì)算海洋裝備的水動力系數(shù)[17]。本文采用商用CFD軟件Star CCM+進(jìn)行Dock勻速和勻加速直航仿真,測算Dock的阻力系數(shù)CxD和附加質(zhì)量系數(shù)λ11D。AUV相關(guān)水動力參數(shù)參考324 mm口徑魚雷數(shù)據(jù)[16]。兩者的計(jì)算模型均采用k—ε湍流模型,其切割體和棱柱層復(fù)合網(wǎng)格形式能充分體現(xiàn)Dock表面流體邊界層的水動力特性,棱柱層總厚度設(shè)為0.025 m,采用速度—壓力分離求解器,離散方式采用二階迎風(fēng)格式。在不同直航速度下,Dock的前向黏性阻力RvD按式(4)經(jīng)線性回歸分析后得到的擬合曲線如圖6所示,其中擬合系數(shù)R2=0.999 7,可見擬合度較好。圖中擬合關(guān)系式的二次項(xiàng)系數(shù)可近似為Dock的縱向阻力系數(shù),無量綱化后可得CxD=0.405。 圖6 不同直航速度下Dock前向黏性阻力擬合曲線Fig.6 Fitting curve of forward drag resistance of Dock under different direct navigation velocities 在Dock以加速度a=1 m/s2的勻加速過程中,其周圍的速度流場如圖7所示。由圖可知,隨著Dock從1 m/s加速至2 m/s,其首尾速度最大差值由1.295 m/s增加至3.141 1 m/s。首尾壓差導(dǎo)致Dock的前向阻力增大。Dock以不同的加速度從靜止?fàn)顟B(tài)勻加速至2 m/s過程中的前向阻力如圖8所示。由圖可知,加速度越大,同一速度下Dock的前向阻力越大。相比于圖6所示Dock在勻速狀態(tài)下的前向阻力,兩者之差可近似為Dock非定常運(yùn)動的流體慣性力。按式(5)進(jìn)行回歸和擬合分析,無量綱化后可得K11D=0.428 9。 圖7 Dock周圍的速度流場(a=1 m/s2)Fig.7 Velocity field around the Dock(a=1 m/s2) 圖8 Dock在不同加速度下的前向阻力Fig.8 Forward resistance of Dock under different accelerations 在對接過程中,AUV與Dock的碰撞邊界為非定常,且剛體碰撞本身就是非線性動力學(xué)問題。碰撞力受到接觸材料、接觸面幾何形狀、碰撞速度等諸多因素影響。對于碰撞力的研究,目前主要有沖量恢復(fù)系數(shù)法、等效彈簧阻尼法和有限元方法[18]。在工程應(yīng)用領(lǐng)域,等效彈簧阻尼法因可以計(jì)算碰撞力的時(shí)變而得到廣泛應(yīng)用。AUV與Dock的碰撞力FC可分解為接觸面的法向分量FCn和切向分量FCt。 根據(jù)Hertz接觸理論,法向力FCn采用非線性彈簧阻尼模型描述[19],其中阻尼項(xiàng)用來描述碰撞過程中碰撞物體的能量損失。忽略因塑性變形造成的能量損耗后,F(xiàn)Cn可表示為: 式中:K為Hertz接觸剛度;δ為接觸點(diǎn)的法向穿透深度;c為材料剛度項(xiàng)貢獻(xiàn)值指數(shù);C為接觸阻尼系數(shù);vn為接觸點(diǎn)的法向相對速度。 接觸剛度由Hertz理論計(jì)算如下: 式中:R1、R2分別為接觸處AUV、Dock的曲率半徑;h1、h2分別為AUV、Dock的材料參數(shù)為材料泊松比,Ei為材料的彈性模量,i=1,2。 接觸阻尼系數(shù)C采用Lankarani等提出的修正遲滯阻尼系數(shù): 式中:e為彈性恢復(fù)系數(shù);n為非線性彈簧力系數(shù);u為碰撞速度。 切向力FCt采用經(jīng)典的庫侖摩擦力模型計(jì)算,其表達(dá)式為: 式中:μ為摩擦系數(shù)。 考慮到在對接過程中碰撞檢測和接觸區(qū)識別的復(fù)雜性,采用ADAMS軟件仿真對接過程。采用彈簧阻尼模型模擬碰撞力FC,其表達(dá)式為[10,13]: 式中:x0為接觸瞬時(shí)兩碰撞物體質(zhì)心之間的初始距離;x為兩接觸物體質(zhì)心之間的實(shí)際距離;dx/dt為兩接觸物體間的相對速度;d為最大穿透深度。 當(dāng)x 除水動力和碰撞力外,AUV、Dock還受到自身重力和浮力的作用。AUV還受到主推力T的作用,在勻速直航狀態(tài)下在懸浮對接和拖曳動對接工況下,Dock還受到纜繩拉力FD的作用,將FD在隨體坐標(biāo)系D-xyz下正交分解為FxD和FyD。 基于本節(jié)提出的簡化假設(shè),在懸浮對接過程中,F(xiàn)xD和FyD分別為: 式中:xD、yD為Dock相對初始位置在E-xyz坐標(biāo)系的坐標(biāo);l為系泊纜繩的長度,取l=10 m;kt為纜繩的彈性系數(shù),取kt=5×104N/m。 在懸浮對接過程中,須滿足|xD|≤1.74 m。 在拖曳動對接過程中,F(xiàn)yD同式(12),F(xiàn)xD為: 式中:vE為期望的Dock直線拖曳航速。 為維持期望的Dock直線拖曳航速,在AUV勻速直航過程中,F(xiàn)xD須維持與Dock以vE速度直航狀態(tài)下的水阻力一致,即FxD=|RvxD+RixD|,其由黏性水阻力和慣性水阻力兩部分組成;當(dāng)Dock的實(shí)際速度小于期望速度時(shí),為使Dock快速啟動,須在維持Dock勻速運(yùn)行的力 |RvxD+RixD|vE的基礎(chǔ)上增加附加力mDaD,取附加加速度aD=0.25 m/s2。 由于難以確定在對接過程中時(shí)變的接觸碰撞區(qū)域,使用ADAMS軟件建立AUV水下對接過程的聯(lián)合仿真模型。 將AUV和Dock幾何模型導(dǎo)入ADAMS軟件,在ADAMS/View環(huán)境中依據(jù)實(shí)際情況設(shè)置AUV和Dock的質(zhì)心、浮心和拖點(diǎn)位置,對應(yīng)設(shè)置其重力、浮力、推力、拖曳力和水動力,并在AUV與Dock之間設(shè)置接觸,添加相關(guān)的測量參數(shù),如AUV、Dock的運(yùn)動參數(shù)。仿真中各參數(shù)的初始設(shè)置值如表1和表2所示。 表2 AUV水下對接仿真模型中主要參數(shù)的初始設(shè)置值Table 2 Initial setting values of main parameters in the AUV underwater docking simulation model ADAMS/Control模塊可用于建立ADAMS與MATLAB/Simulink之間的數(shù)據(jù)接口,通過狀態(tài)變量數(shù)組實(shí)現(xiàn)數(shù)據(jù)傳輸[20]。該數(shù)組包含一系列數(shù)值,代表系統(tǒng)事先設(shè)定的參數(shù),包括輸入變量和輸出變量。輸入變量一般為由控制系統(tǒng)輸入虛擬樣機(jī)系統(tǒng)的受控量或外界須傳輸?shù)教摂M樣機(jī)系統(tǒng)讓樣機(jī)感知的變量,如對接系統(tǒng)中推進(jìn)力和Dock的拖曳力等;輸出變量為虛擬樣機(jī)系統(tǒng)輸出到控制系統(tǒng)的反饋?zhàn)兞亢陀脩舯O(jiān)測的變量。 在ADAMS環(huán)境中輸入變量為:AUV的前向推力T、Dock的前向拖曳力FDx。輸出變量為:Dock的位移xD、速度vxD;AUV的速度vxA;AUV與Dock的相對距離Lr;AUV與Dock之間的碰撞力FC。AUV水下對接過程聯(lián)合仿真模型的數(shù)據(jù)流如圖9所示。在仿真模型中,由ADAMS的求解器求解對接系統(tǒng)動力學(xué)方程,由Simulink求解已設(shè)計(jì)的控制算法方程。設(shè)置2個solver求解過程中的數(shù)據(jù)交換周期為0.005 s。 圖9 AUV水下對接過程聯(lián)合仿真模型的數(shù)據(jù)流Fig.9 Data flow of co-simulation model for AUV underwater docking process 對AUV入塢最后階段的控制一般采用簡單的單期望航速控制方法。該方法更側(cè)重對AUV方向的控制,忽略在對接過程中AUV前向運(yùn)動的控制,這可能導(dǎo)致AUV與對接裝置碰撞后回彈,速度急劇減小,對推進(jìn)器造成極大沖擊。此外,若AUV卡在導(dǎo)向罩收口處,在靜對接時(shí)推進(jìn)器會持續(xù)高速旋轉(zhuǎn),導(dǎo)致能量急劇消耗;在懸浮對接時(shí)可能導(dǎo)致AUV推動對接裝置而使其原地打轉(zhuǎn)。所以,基于建立的水下對接聯(lián)合仿真模型,研究在不同對接場景下AUV最后入塢階段的前向運(yùn)動控制方案。 假定AUV在最后入塢階段航向調(diào)整正常,直線跟蹤狀態(tài)良好。重點(diǎn)研究在靜對接、懸浮對接和拖曳動對接三種場景下AUV前向運(yùn)動控制方案。 在以往的研究中,接駁控制常采用如圖10和圖11所示的速度和相對位置閉環(huán)控制方案。然而AUV在水下的運(yùn)動具有大慣性和長時(shí)滯特性[21],具體表現(xiàn)在:在恒定推進(jìn)器轉(zhuǎn)速的條件下,AUV的加速運(yùn)動過程緩慢;當(dāng)推進(jìn)器轉(zhuǎn)速為0 r/min時(shí),AUV依然會因慣性而航行一段距離。在水下對接過程中,AUV因碰撞而瞬間減速,如果這一過程不能平滑過渡,會降低對接的準(zhǔn)確性和快速性。因此,本文通過綜合常規(guī)的速度閉環(huán)控制和相對位置閉環(huán)控制,提出一種對AUV推進(jìn)力進(jìn)行線性控制的位置-速度閉環(huán)控制方法,如圖12所示。相比于相對位置閉環(huán)控制,在原有距離偏差基礎(chǔ)上,引入了AUV和Dock的前向速度(在靜對接和懸浮對接過程中,Dock前向速度設(shè)為0 m/s),將三者線性組合后的速度偏差作為控制量,主推進(jìn)力作為AUV運(yùn)動的被控輸入量,AUV的實(shí)際運(yùn)動量作為輸出量,也作為反饋控制量。該控制方案既兼顧了AUV運(yùn)動慣性和水流的擾動,又可起到提前“剎車”的作用。 圖10 速度閉環(huán)控制框圖Fig.10 Velocity closed-loop control block diagram 圖11 相對位置閉環(huán)控制框圖Fig.11 Relative position closed-loop control block diagram 圖12 位置-速度閉環(huán)控制框圖Fig.12 Position-velocity closed-loop control block diagram 控制方案采用PID(proportion-integral-derivative,比例-積分-微分)控制算法。位置-速度閉環(huán)控制可表示為: 式中:Te為作用于AUV的目標(biāo)控制推力;Δv為AUV目標(biāo)控制速度與AUV實(shí)際速度的偏差值(AUV實(shí)際速度可以通過慣性組合導(dǎo)航系統(tǒng)獲得);kp、ki、kd為PID參數(shù);vD為Dock實(shí)際運(yùn)動速度(通過解算超短基線獲得Dock位置信息,將其微分處理后可得到vD);ΔL為AUV與Dock相對距離的偏差,其比例系數(shù)根據(jù)經(jīng)驗(yàn)設(shè)為,其中v為對接過程中maxAUV的最大期望航速,L0為AUV執(zhí)行對接入塢指令時(shí)與Dock的初始相對距離,設(shè)L0=4 m。 評判接駁控制方案優(yōu)劣的指標(biāo)為: 1)對接成功,即滿足L≤LE3=0.115 m。 2)對接過程耗時(shí)短。 接駁時(shí)從L0=4 m開始計(jì)時(shí),當(dāng)L滿足指標(biāo)1)并持續(xù)5 s,該過程所用時(shí)間為對接耗時(shí)。 3)對接過程中能量消耗少。 根據(jù)一維運(yùn)動物體機(jī)械功的物理定義,同時(shí)考慮不同運(yùn)動狀態(tài)下推進(jìn)器推力—功率關(guān)系和推進(jìn)器的功率損耗,采用以下近似方法來計(jì)算對接過程的耗能Q: 式中:η為推進(jìn)器的能量轉(zhuǎn)換效率,取η=0.6;kT為在AUV零節(jié)航速下推進(jìn)器推力—功率比例系數(shù),此處將v≤0.01m/s定性為零節(jié)航速,取kT≈4.09。 4)碰撞次數(shù)少,最大碰撞力小。 在對接碰撞中,當(dāng)碰撞力FC>100 N時(shí)記為1次碰撞。一般第1次碰撞時(shí)初始速度大,產(chǎn)生的FC最大。 根據(jù)以上4項(xiàng)指標(biāo),對比分析對在靜對接、懸浮對接和拖曳動對接三種場景下的接駁控制結(jié)果。 4.2.1 靜對接 在不同接駁控制方案下靜對接的仿真結(jié)果如圖13和表3所示。雙恒力開環(huán)和雙速度閉環(huán)控制方案是以AUV是否碰撞反彈為邏輯條件,設(shè)定了2個不同的控制目標(biāo)值。由圖13可知,在單恒力和雙恒力開環(huán)控制下,AUV在啟動階段響應(yīng)較慢,勻加速至約1.3 m/s后與Dock發(fā)生碰撞,回彈3次后才對接成功。雙恒力開環(huán)方案是基于單恒力控制方案,當(dāng)檢測到AUV發(fā)生碰撞時(shí),調(diào)整目標(biāo)推力使之大于原來的設(shè)定值。這種做法可以減少一定的調(diào)整時(shí)間,但總體能耗呈直線上升。其余4種閉環(huán)控制方案可以很好地抑制AUV長時(shí)滯運(yùn)動特性,AUV基本都在2.6 s以內(nèi)達(dá)到最大速度。碰撞后,2種速度閉環(huán)控制能夠通過增大推進(jìn)力有效地抑制回彈后AUV的運(yùn)動慣性,減少對接耗時(shí),但能耗陡然增加。在相對位置閉環(huán)控制下AUV初始啟動響應(yīng)迅速,但是在AUV與Dock的相對距離較小時(shí),該方案對AUV的調(diào)整能力相比速度閉環(huán)控制方案弱,加大了對接耗時(shí)。位置-速度閉環(huán)控制取得了提前“剎車”的效果,避免了AUV與Dock的猛烈碰撞,減小了碰撞力,從而避免其回彈過多而造成能量消耗。由表3可知,在位置-速度閉環(huán)控制下,AUV對接耗時(shí)僅比耗時(shí)最少的單速度閉環(huán)控制多0.135 s,而其余指標(biāo)均為最優(yōu)。 圖13 不同接駁控制方案下靜對接仿真結(jié)果1Fig.13 The first simulation result of static docking under different connection control schemes 表3 不同接駁控制方案下靜對接仿真結(jié)果2Table 3 The second simulation result of static docking under different connection control schemes 4.2.2 懸浮對接 為了避免懸浮對接成功后Dock的前向位移大于1.74 m,僅采用雙速度閉環(huán)、相對位置閉環(huán)和位置-速度閉環(huán)三種控制方案。在不同接駁控制方案下懸浮對接的仿真結(jié)果如圖14和表4所示。由圖14可知,在3種控制方案下AUV啟動響應(yīng)都非常迅速。在雙速度閉環(huán)控制下,AUV與Dock之間的接觸力持續(xù)作用在處于懸浮狀態(tài)的Dock上,外加Dock自身的慣性力,Dock前向運(yùn)動超過2 m,然后在AUV恒推力的作用下,AUV與Dock共同回?cái)[至受力平衡狀態(tài),此時(shí)Dock前向位移約1 m。由于AUV推進(jìn)器持續(xù)高速運(yùn)轉(zhuǎn),能耗持續(xù)增加。在相對位置閉環(huán)控制下,懸浮的Dock有明顯的漸進(jìn)擺蕩現(xiàn)象,而且在第15秒和第30秒附近AUV推進(jìn)器所提供的推力并沒有使AUV有效跟蹤Dock的懸浮擺動幅值,造成其相對距離嚴(yán)重超出0.115 m。所以,當(dāng)Dock處于正向位移且滿足L≤0.115 m時(shí),須再次啟動導(dǎo)向罩合攏操作,因此增加了1次對接失敗的風(fēng)險(xiǎn)。想要完全滿足穩(wěn)定的對接條件,還須等待Dock擺蕩4~5個周期。相比之下,在位置-速度閉環(huán)方案下AUV與Dock距離的變化曲線平緩,并在相對距離滿足對接成功要求時(shí),AUV仍受較小的推進(jìn)力的作用,使AUV艏部與Dock有較好的貼合。當(dāng)懸浮對接系統(tǒng)處于平衡狀態(tài)時(shí),Dock前向位移僅為0.1 m左右,為導(dǎo)向罩的合攏創(chuàng)造了穩(wěn)定的對接環(huán)境。由表4可知,雙速度閉環(huán)、相對位置閉環(huán)控制方案都存在碰撞力大導(dǎo)致的對接過程中Dock偏移過大的問題,盡管在雙速度閉環(huán)控制下對接耗時(shí)最少,也克服了懸浮Dock的漸進(jìn)擺蕩,但造成了一定的能耗。位置-速度閉環(huán)控制方案則能從根本上降低對接過程碰撞時(shí)刻AUV與Dock的相對速度,減小兩者之間的碰撞力,從而減小抑制Dock擺蕩的功耗,進(jìn)而縮短對接耗時(shí)。 圖14 不同接駁控制方案下懸浮對接仿真結(jié)果1Fig.14 The first simulation result of floating docking under different connection control schemes 表4 不同接駁控制方案下的懸浮對接仿真結(jié)果2Table 4 The second simulation result of floating docking under different connection control schemes 4.2.3 拖曳動對接 針對拖曳動對接,僅對相對位置閉環(huán)和位置-速度閉環(huán)兩種具有自主跟隨特性的控制方案進(jìn)行研究。在不同接駁控制方案下拖曳對接的仿真結(jié)果如圖15和表5所示。由圖15可知:在相對位置閉環(huán)控制下,當(dāng)AUV與Dock的相對距離小于0.25 m時(shí),AUV的控制推進(jìn)力迅速減小,這導(dǎo)致AUV在9 s內(nèi)經(jīng)過2次回彈后,再過10 s也未能追上以1 m/s作勻速直線運(yùn)動的Dock;在位置-速度閉環(huán)控制下,AUV迅速加速啟動,經(jīng)“剎車”后迅速減速至約1.12 m/s與Dock產(chǎn)生碰撞力為119.2 N的微小撞擊,然后AUV迅速減速至1 m/s,跟隨Dock等速航行。由表5可知,相對位置閉環(huán)位控制方案下對接耗時(shí)長于20 s,即仿真20 s時(shí)還不具備良好的對接前提條件:L≤0.115 m。 圖15 不同接駁控制方案下拖曳對接仿真結(jié)果1Fig.15 The first simulation result of towing docking under different connection control schemes 表5 不同接駁控制方案下拖曳對接仿真結(jié)果2Table 5 The second simulation result of towing docking under different connection control schemes 為了進(jìn)一步驗(yàn)證在位置-速度閉環(huán)控制下AUV優(yōu)良的響應(yīng)性和跟隨性,對Dock在原有拖曳力的基礎(chǔ)上施加幅值為100 N、頻率為0.2 Hz的正弦脈動擾動,探究對接系統(tǒng)的變速跟蹤效果。位置-速度閉環(huán)控制下對接系統(tǒng)的變速跟蹤效果如圖16所示。 圖16 位置-速度閉環(huán)控制下對接系統(tǒng)的變速跟蹤效果Fig.16 Variable velocity tracking effect of docking system under position-velocity closed-loop control 由圖16可知:Dock從初始狀態(tài)加速后,在脈動擾動力的作用下,前向速度出現(xiàn)波動,在第7秒時(shí)與AUV發(fā)生碰撞,其前向速度小幅增加后,在水阻力的作用下又迅速恢復(fù)到原有運(yùn)動狀態(tài);碰撞后,AUV的速度瞬間小幅減小,之后便進(jìn)入跟隨Dock的運(yùn)動狀態(tài),第7秒后其實(shí)際速度與Dock的前向速度基本一致,且兩者相對距離滿足對接要求,表明了位置-速度閉環(huán)控制方案的適用性。 綜合以上分析可知:對于3種不同的水下對接場景,在速度閉環(huán)控制下,AUV在最后入塢階段前向運(yùn)動的啟動響應(yīng)快,對自身慣性抑制作用明顯,但是能耗大;在相對位置閉環(huán)控制下,盡管能耗相對速度閉環(huán)方案小,但是AUV近距離跟隨響應(yīng)慢,導(dǎo)致抑制碰撞反彈的效果稍差;位置-速度閉環(huán)控制綜合了速度閉環(huán)和相對位置閉環(huán)控制的優(yōu)勢,使AUV具有良好的響應(yīng)性、跟隨性和經(jīng)濟(jì)性,因此該控制方案適用于不同的水下對接場合。 本文基于水面無人艇自主部署AUV的應(yīng)用需求,提出并設(shè)計(jì)了一種導(dǎo)向罩開合式水下對接裝置及其主要技術(shù)指標(biāo)和對接流程。分別對在靜對接、懸浮對接和拖曳動對接場景下的AUV和Dock進(jìn)行受力分析,借助水動力軟件確定Dock前向運(yùn)動的相關(guān)水動力系數(shù),以完善基于ADAMS建立的水下對接動力學(xué)模型。結(jié)合MATLAB/Simulink控制仿真軟件,著重探討了在不同接駁控制方案下AUV在最后入塢階段不同對接場景下的對接效果。根據(jù)分析,得出以下結(jié)論: 1)配置在水面無人艇自主部署AUV系統(tǒng)中的新型水下開合對接裝置,主要應(yīng)用在無人艇機(jī)動和非機(jī)動兩種狀態(tài)下的懸浮對接和拖曳動對接場景。為了實(shí)現(xiàn)AUV自動化布放與回收、水下平穩(wěn)拖曳和提高AUV對接的準(zhǔn)確性,將Dock設(shè)計(jì)成具有開合形態(tài)的傘狀規(guī)則流線外形。 2)在靜對接場景下,因Dock固定,可供選擇的AUV接駁控制方案較多。在實(shí)際應(yīng)用中,考慮實(shí)施控制方案的簡便性,考慮采用單速度閉環(huán)的接駁控制方案。 3)在懸浮對接場景下,須避免因Dock與AUV碰撞力過大造成Dock懸浮擺蕩幅值過大。可以采用具有持續(xù)前向推進(jìn)力的速度閉環(huán)方案,以抑制Dock的回?cái)[;為從根本上減小Dock與AUV的碰撞力,采用具有“剎車”效果的位置-速度閉環(huán)接駁控制方案。 4)在拖曳動對接場景下,AUV須變速直線跟蹤Dock,以完成動態(tài)對接。相比其他方案,采用位置-速度閉環(huán)控制方案不僅能實(shí)現(xiàn)AUV與Dock的動態(tài)對接,而且具有更好的快速性、準(zhǔn)確性和經(jīng)濟(jì)性。 5)在以上不同接駁控制方案中,均須根據(jù)AUV和Dock的速度與阻力的關(guān)系,通過PID控制器控制AUV推進(jìn)器的轉(zhuǎn)速,從而控制AUV的輸出推進(jìn)力。 6)水下對接系統(tǒng)動力學(xué)簡化分析有助于快速掌握AUV在對接入塢過程中的運(yùn)動規(guī)律,為建立其復(fù)雜的動力學(xué)模型和仿真平臺作鋪墊;同時(shí),構(gòu)建和使用AUV對接控制聯(lián)合仿真平臺,有助于快速驗(yàn)證和制定水下對接策略,對研究不同形式水下對接的操縱和控制具有一定的工程意義。

2.3 碰撞力建模



2.4 其他力建模

3 AUV水下對接過程聯(lián)合仿真模型
3.1 幾何物理模型的建立
3.2 數(shù)據(jù)接口定義
4 接駁控制方案的設(shè)計(jì)與結(jié)果分析
4.1 接駁控制方案設(shè)計(jì)

4.2 接駁控制仿真結(jié)果分析

5 結(jié)論