復雜地形條件下多密度級無人機LiDAR點云DEM精度研究
——以2022年北京冬奧會延慶賽區為例
2021-11-16 14:29:58霍芃芃王梓琪
北京測繪 2021年10期
霍芃芃 王梓琪 閆 旭
(1. 北京市測繪設計研究院, 北京 100038; 2. 城市空間信息工程北京市重點實驗室, 北京 100038;3. 北京建筑大學 測繪與城市空間信息學院, 北京 100044)
0 引言
高精度數字高程模型(Digital Elevation Model, DEM)是重要的地形數據產品之一,可為實際地形提供多尺度、多粒度、多視角的細節描述,為國內外重大活動、賽事場館及基礎設施的高水平規劃設計、建設運營提供重要信息化數據支撐[1]。無人機激光雷達(Light Detection and Ranging, LiDAR)技術因具備高時效、高精度、低成本、低環境影響等優勢[2-4],已發展成為地形數據獲取的最有力手段之一。
已有研究表明,增加LiDAR點云數據密度能夠在一定程度上提高DEM數據精度[5~6]。在地形復雜區域,高密度LiDAR點云數據有助于高精度的地形表達,但對于地形平緩區域,過度的數據冗余不僅無益于地形表達,還將直接影響數據存儲速度、顯示速率、生產和交互的難易程度等[7]。因此,在顧及地形特征、保證DEM數據精度的前提下,最大程度節省數據獲取成本、處理時間及存儲空間,實現復雜地形LiDAR點云數據抽稀簡化是十分必要的[8]。
國內外關于顧及地形特征的LiDAR點云數據抽稀算法,主要可分為三種:(1)基于鄰近距離及高差的抽稀算法[9-10],該方法以搜索半徑及點間高差作為判斷依據,搜索半徑可控制抽稀程度,點間高差可控制抽稀精度,無人機LiDAR點云數據密度大,該方法需對所有點進行遍歷,計算效率相對較低;(2)基于不規則三角網的抽稀算法[11],將原始LiDAR點云數據轉化為不規則三角網(Triangulation Irregular Network, TIN)模型數據,通過計算各三角面法線向量間夾角大小,進行抽稀判定;(3)基于坡度的抽稀算法[12],與方法(2)相同,首先構建原始LiDAR點云數據TIN模型,然后將某點與相鄰所有三角面的坡度差作為評判標準,從而進行抽稀判定。(2)、(3)的基本思路一致,均可較好地保留地形特征點,但方法(3)僅利用坡度差判斷點間的空間關系,對于復雜地形而言,約束條件過于簡單,且對于傾斜度較小的特殊區域易造成地形分類誤差,導致后期精度評價偏差。
綜上所述,本文以2022年北京冬奧會延慶賽區場館建設用地為實驗對象,首先對經過預處理的無人機LiDAR點云數據,進行濾波及分類后處理;之后,對分類后的地面點數據,選取基于TIN的數據抽稀算法,按照 1、1/20、1/50、1/100、1/500、1/1 000倍進行抽稀處理,并采用克里金插值算法制作同尺度下不同密度地面點DEM數據;最終,通過高程中誤差與平均絕對誤差兩項指標,對各版本DEM數據進行精度評定與分析[13],以期實現最大限度提升DEM數據制作精度與構建效率的同時,保障數據獲取成本及處理效率。
1 研究概述
1.1 數據情況與處理
本次實驗區為2022年北京冬奧會延慶賽區建設用地,該地區高差跨度廣,存在局部地形突變,地形地勢復雜。選取約1.5 km2局部復雜地形區域作為實驗區域,該區域山體最大垂直落差可達650 m,坡度最大可達60°,地物構成主要為草地、森林、人工建筑道路等,位置及范圍詳見圖1。本次實驗選用大疆經緯M600 Pro作為無人機飛行平臺,于2019年7月進行數據采集。飛行參數: 傳感器RIEGL VUX-1UAV,相對飛行高度200~300 m,飛行速度10 m/s,最大俯仰角25°,掃描頻率300 kHz,點密度約20個/m2。
圖1 實驗區地理位置及范圍示意圖
首先,對原始無人機LiDAR點云數據進行預處理,之后經過后處理將地面點數據分類出來,利用基于TIN的抽稀算法,按照 1、1/20、1/50、1/100、1/500、1/1 000倍進行抽稀處理,之后利用克里金插值算法,對不同密度下地面點數據進行插值處理,制作DEM數據成果,最終利用高程中誤差與平均絕對誤差兩個精度評判標準,結合外業駐站控制點數據,對各版DEM數據成果進行精度評定,具體流程如圖2所示。

圖2 不同密度LiDAR點云數據制作DEM成果精度評定流程
1.2 基于不規則三角網的抽稀算法
大部分點云數據簡化算法原理是基于局部信息,根據地形特征形態參數,設定LiDAR點云數據取舍閾值,然后依據取舍規則實現抽稀處理[14-15]。基于TIN的抽稀算法,首先對原始LiDAR點云數據構建TIN模型,指定抽稀后TIN模型節點數減少到指定值N,默認指定值小于原始TIN模型的節點計數,本文則是按一定收縮比例進行計數。

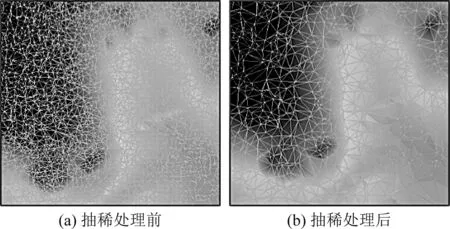
圖3 基于TIN的抽稀算法示意圖
1.3 克里金差值算法
克里金插值算法是基于統計學的空間局部插值方法。根據已知點的空間分布特點與趨勢,將變異函數理論和結構分析作為基礎,利用數據驅動加權函數生成的克里金權重,可對區域化變量進行無偏最優估計[16-17]。當有良好的變異函數模型時,克里金插值算法能夠提供最佳的插值結果。克里金插值算法是一種局部確定性插值的技術,以定義鄰域中采樣點的距離加權平均來計算該值。克里金插值算法公式如(1)所示。
(1)
式(1)中,Z(Si)為第i個位置處的測量值;λi為第i個位置處的測量值的未知權重;s0為預測位置;N為測量值數。對于不同復雜程度的地形,克里金插值算法均能實現有效的空間插值且精度較高[18]。其中普通克里金插值假設數據變化呈正態分布,變量Z的期望值是未知的克里金插值[19],本次實驗區為較為典型的復雜地形山區,選用普通克里金插值方法進行DEM構建。
1.4 精度評定
DEM數據精度與原始無人機LiDAR點云數據質量、分布情況、插值方法、采樣精度等因素相關[20-21]。高程中誤差(Mean Square Error of Height)是插值生成的DEM數據格網點相對于高程真值的偏離程度,這項指標被普遍運用于DEM數據成果的精度評估,平均絕對誤差(Mean Absolute Deviation,MAD)可以避免誤差相互抵消的問題,因而可以準確反映實際誤差大小[22-23]。本文采用24個均勻分布于實驗區的控制點,通過以上兩項評定方法,對不同抽稀倍數無人機LiDAR點云數據制作生產的DEM數據成果進行精度評定與分析。控制點分布情況如圖4所示。

圖4 控制點分布示意圖
高程中誤差計算公式:
(2)
平均絕對誤差計算公式:
(3)
式(2)~(3)中,ZDEM表示控制點k在DEM所提取得到的高程值;ZGCP表示控制點k通過外業測繪方式獲取到的實際高程值,n表示實驗使用的控制點總數。
本文統一制作生產格網尺寸為1 m的DEM數據成果,在實際工程項目的生產應用中,國家測繪地理信息局在相關測繪行業標準[24]中對DEM成果數據的格網尺寸和高程中誤差精度指標做出要求,詳見表1。

表1 DEM格網尺寸和高程中誤差精度指標
2 實驗結果與分析
2.1 抽稀比例
對濾波分類后的地面點數據,按照1、1/20、1/50、1/100、1/500、1/1 000倍進行抽稀操作,以得到不同密度下LiDAR點云數據。實驗區地面點數據變化情況如表2所示,實驗結果見圖5。結合表2與圖5可知,隨著抽稀倍數增加,地面點密度逐漸降低,其對地物信息的直觀表達能力逐漸喪失,細節描述能力降低顯著。例如:原始地面點數據對山脊線、山谷線以及盤山路的輪廓信息表達完好,當抽稀倍數為1/100時,仍可較為直觀地看出山體的大致輪廓信息,但是當抽稀倍數達到1/1 000時,已完全不能根據地面點數據判斷山形,甚至無法判斷數據所屬地物類型。

表2 地面點變化情況

圖5 不同抽稀倍數地面點變化示意圖
2.2 不同密度條件下DEM插值結果
基于不同抽稀倍數的無人機LiDAR點云數據,生產制作的DEM數據成果、精度評價結果及時耗趨勢見圖6~8和表3。通過圖6和表3不難發現,抽稀倍數與高程中誤差、平均絕對誤差值成正相關關系,與時耗成反相關關系。隨著抽稀倍數的不斷增大,制作DEM數據成果的時耗逐漸降低,且精度逐漸降低,高程中誤差值由0.381 m增大至1.914 m,平均絕對誤差值由0.335 m增大至1.357 m。

圖6 不同密度地面點制作DEM示意圖

表3 地面點變化情況
結合表1、表3和圖6可知,原始地面點數據制作的DEM數據成果對山形地勢細節描述程度較高,高程中誤差為0.381 m,滿足一級標準,平均絕對誤差為0.335 m;當抽稀倍數為1/20時,DEM數據成果較原始數據雖喪失局部細節,但對于重要的特征地物,如盤山路等,仍可進行較為完整的表達,高程中誤差為0.430 m,滿足一級標準,平均絕對誤差為0.366 m;當抽稀倍數為1/50時,DEM數據成果對特征地物進行表達時,輪廓邊緣處頻繁出現較大三角面,高程中誤差為0.710 m,大于0.70 m,滿足二級標準,平均絕對誤差為0.516 m;當抽稀倍數為1/500時,DEM數據成果對山脊線表達已明顯退減,高程中誤差為1.261 m,大于1.00 m,滿足三級標準,平均絕對誤差為0.970 m,當抽稀倍數為1/1 000時,DEM數據成果已基本喪失直觀表達地形能力,盤山路已無法直觀判斷,僅存大致線狀形態,高程中誤差為1.914 m,大于1.50 m,不滿足精度要求,平均絕對誤差為1.357 m。

圖7 不同密度地面點制作DEM精度評定趨勢圖

圖8 不同密度地面點制作DEM時耗趨勢圖
坡度是對山形地貌分析的重要評判標準之一[25-26]。對以上6版不同抽稀倍數無人機LiDAR點云數據生產制作的DEM數據成果進行坡度變化分析,原始地面點數據制作的DEM數據成果坡度區間處于0°~82.582°之間,當抽稀倍數為1/50時,坡度最小值發生變化,當抽稀倍數為1/1 000時,坡度最大值由82.582°降低至70.983°。
由此可知,在滿足DEM數據成果精度需求的前提下,可適度根據處理目標的實際地形特征,采用較低密度的無人機LiDAR點云數據進行DEM數據成果制作,以達到降低數據獲取與制作的成本,同時提高數據的處理效率。
3 結束語
為提升山區復雜地形下DEM數據生產制作效率,降低無人機LiDAR點云數據獲取成本,本研究選取冬奧會延慶賽區為實驗區,以原始無人機LiDAR點云數據為基礎,對分類后地面點數據進行抽稀處理,利用獲得的不同密度地面點數據插值生成的相同柵格尺度DEM,比對各個版本DEM數據生成的精度。
結果表明,各個版本DEM數據精度均隨抽稀比例的增大而逐漸降低。高程中誤差從0.381 m上升至1.914 m,產品級別由一級轉至三級,精度明顯下降,平均絕對誤差則從0.335 m上升至1.357 m。由此可以推理,針對生產制作山區復雜地形的DEM數據,依據精度級別需求,所需LiDAR點云數據密度不同,滿足精度要求的前提下,可適度對LiDAR點云數據進行抽稀處理,以保障生產時效。如當要求DEM精度達到一級標準時,無人機LiDAR點云數據點密度可保持在每平方米0.5~3個點,當要求DEM精度達到二級標準時,無人機LiDAR點云數據點密度可保持在每平方米0.1個點左右。綜上可知,DEM數據精度與無人機LiDAR點云數據密度密切相關,隨著LiDAR點云數據密度的降低,DEM數據精度逐漸下降。
本研究存在的不足之處是實驗區僅有一處,且未針對不同地形結構及地物類別進行詳細分析,本實驗結論在其他復雜地形條件下的適用性有待進一步驗證。在未來的實際生產與科學研究中,應盡量選取更加豐富詳盡的實驗對象,增強結論的科學性與適用性的同時,以期為類似研究內容提供參考。
