異步電機直接轉矩控制的仿真與研究*
2021-11-15 02:41:38王發良劉邦雄梅立雪
南方農機 2021年21期
王發良 , 劉邦雄 , 梅立雪
(景德鎮學院機械電子工程學院,江西 景德鎮 333000)
直接轉矩控制技術是20世紀80年代興起的一種新型電機控制技術,直接在定子坐標系下對電機電磁轉矩進行控制[1]。基于定子磁鏈定向,采用離散的兩點式滯環控制器產生PWM信號,直接對逆變器開關期間的狀態進行控制,因而響應速度快。
相比較于矢量控制,直接轉矩控制省去了矢量解耦控制,控制簡單,便于理解。但是傳統的直接轉矩控制由于采用了兩點式的滯環控制器對電磁轉矩進行控制,造成控制系統的轉矩脈動[2]。針對此問題,課題組利用零矢量具有保持轉矩的特性,在傳統的兩點式滯環轉矩控制器中加入零矢量,構成三點式滯環控制器,從而有效減小了轉矩波動。
1 異步電機直接轉矩控制原理
異步電動機電磁轉矩表達式為[3]:

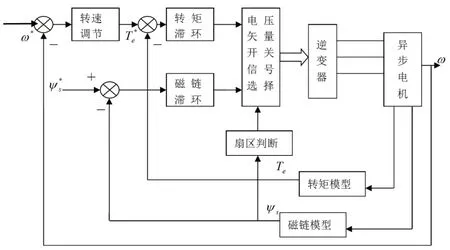
圖1 異步電機直接轉矩控制原理圖
異步電機直接轉矩控制是一個雙閉環控制系統,外環的轉矩調節控制器一般采用PI控制,內環采用轉矩滯環、磁鏈滯環控制,其基本工作原理如下:給定轉速和實際測量轉矩的誤差通過轉矩調節器生成轉矩給定,轉矩給定和轉矩模型估算出的轉矩的誤差通過轉矩滯環比較器,生成轉矩偏差信號TQ;同理,磁鏈給定和磁鏈模型估算出的磁鏈的誤差通過磁鏈滯環比較器,生成磁鏈偏差信號ΨQ;最后,根據轉矩偏差信號TQ、磁鏈偏差信號ΨQ以及定子磁鏈所屬扇區θ選擇合適的電壓空間矢量,對逆變器進行控制,達到控制異步電機電磁轉矩的目的。
1.1 磁鏈觀測模型
利用傳感器測量得到的定子電壓、定子電流和轉速等信息,能夠對定子磁鏈的幅值和相位進行實時估計[4]。電壓電流(U-I)模型方程是最常用的定子磁鏈觀測模型。

1.2 磁鏈控制
磁鏈控制采用的兩點式的滯環比較器,當給定信號和反饋信號之間的誤差超出誤差下限時,要減小磁鏈幅值,此時輸出ΨQ為0;當給定信號和反饋信號之間的誤差超出誤差上限時,要增大磁鏈幅值,此時輸出ΨQ為1;當給定信號和反饋信號之間的誤差在允許范圍內,不進行控制。如圖2所示。

圖2 兩點式磁鏈滯環比較器
1.3 轉矩觀測模型
根據式(1),可以得到靜止兩相坐標系下電磁轉矩觀測器的表達式:

1.4 轉矩控制
傳統的轉矩控制和磁鏈控制一樣,采用的也是兩點式的滯環比較器,但當轉矩給定和轉矩反饋之間的誤差在允許范圍內,轉矩不受控會引起轉矩波動[5]。針對此問題,本課題組采用三點式的滯環比較器,當轉矩給定和轉矩反饋之間的誤差超出上限和下限時,其操作和兩點式一樣,唯一不同之處在于,當轉矩給定和轉矩反饋之間的誤差在允許范圍內,利用零矢量具有保持電磁轉矩的作用的特性,引入了電壓零矢量,從而減小轉矩脈動[6]。如圖3所示。

圖3 三點式轉矩滯環比較器
1)給定轉矩值和測量轉矩值的誤差小于誤差下限時,要減小電磁轉矩,此時輸出TQ=-1;
2)給定轉矩值和測量轉矩值的誤差在允許范圍內時,電磁轉矩要保持不變,此時輸出TQ=0;
3)給定轉矩值和測量轉矩值的誤差大于誤差上限時,要增加電磁轉矩,此時輸出TQ=1。
1.5 扇區判斷
扇區劃分方法如下:

基于αβ坐標系下的扇區劃分圖如圖4所示。

圖4 扇區劃分圖
1.6 定子電壓空間矢量開關表
確定了轉矩偏差信號TQ、磁鏈偏差信號ΨQ以及定子磁鏈所屬扇區θ,就可以選擇合適的電壓空間矢量。經過分析可得到如表1、表2所示兩種開關表。

表1 開關表(未加入零矢量)

表2 開關表(加入零矢量)
2 仿真分析
在Matlab2018b中的simulink下建立如圖5所示加入零矢量的異步電機DTC仿真模型,電機基本參數如下:Pn=4 kW,Un=220 V,極對數為2,定子電阻Rs=1.45 Ω。

圖5 加入零矢量的直接轉矩控制仿真模型
仿真設置:給定轉速800 r/min,給定磁鏈1 Wb,0.1 s加載50 nm,0.15 s減載50 nm。傳統DTC和加入零矢量的直接轉矩控制的磁鏈、轉速和轉矩的仿真結果分別如圖6和圖7所示。
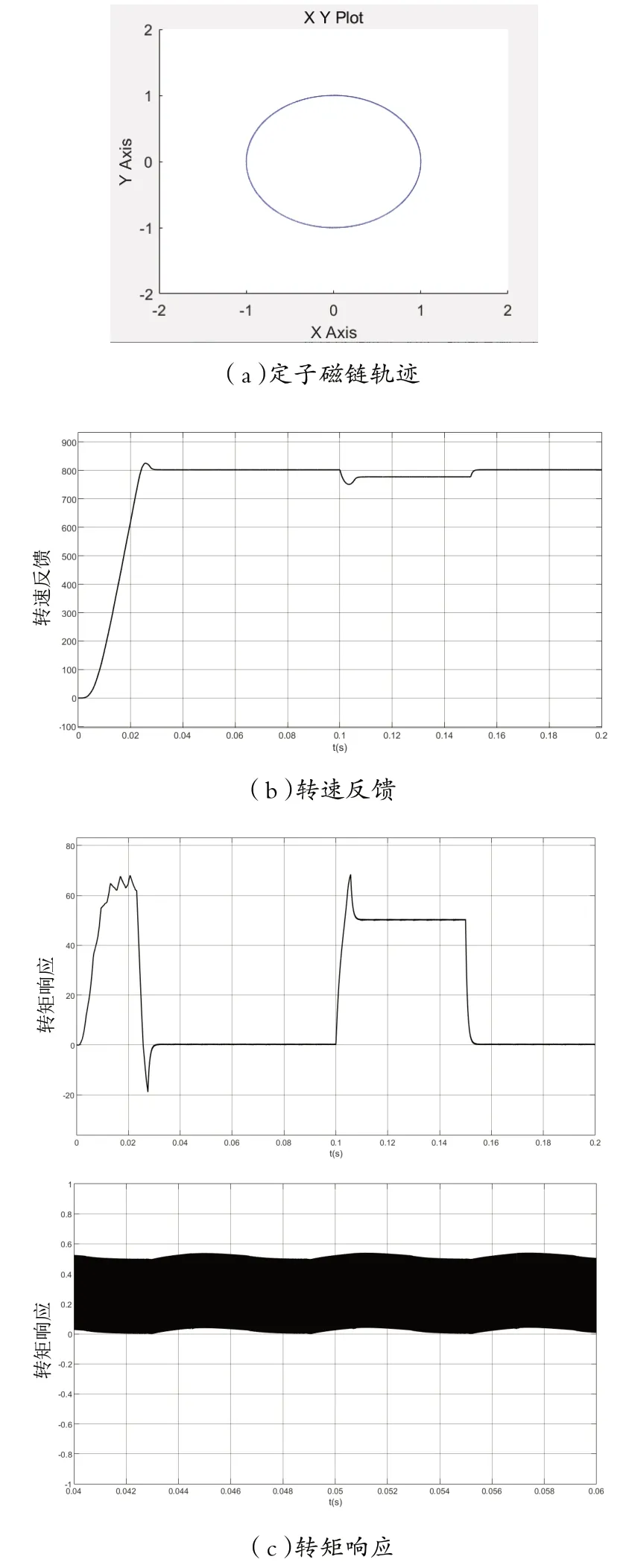
圖6 傳統DTC算法
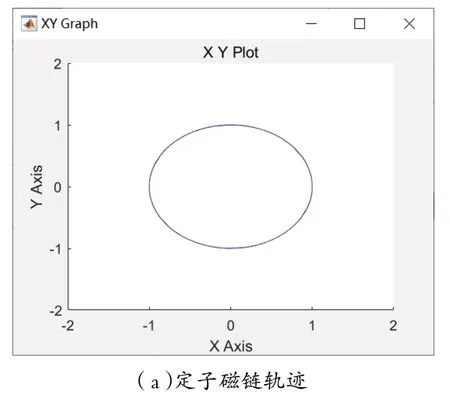
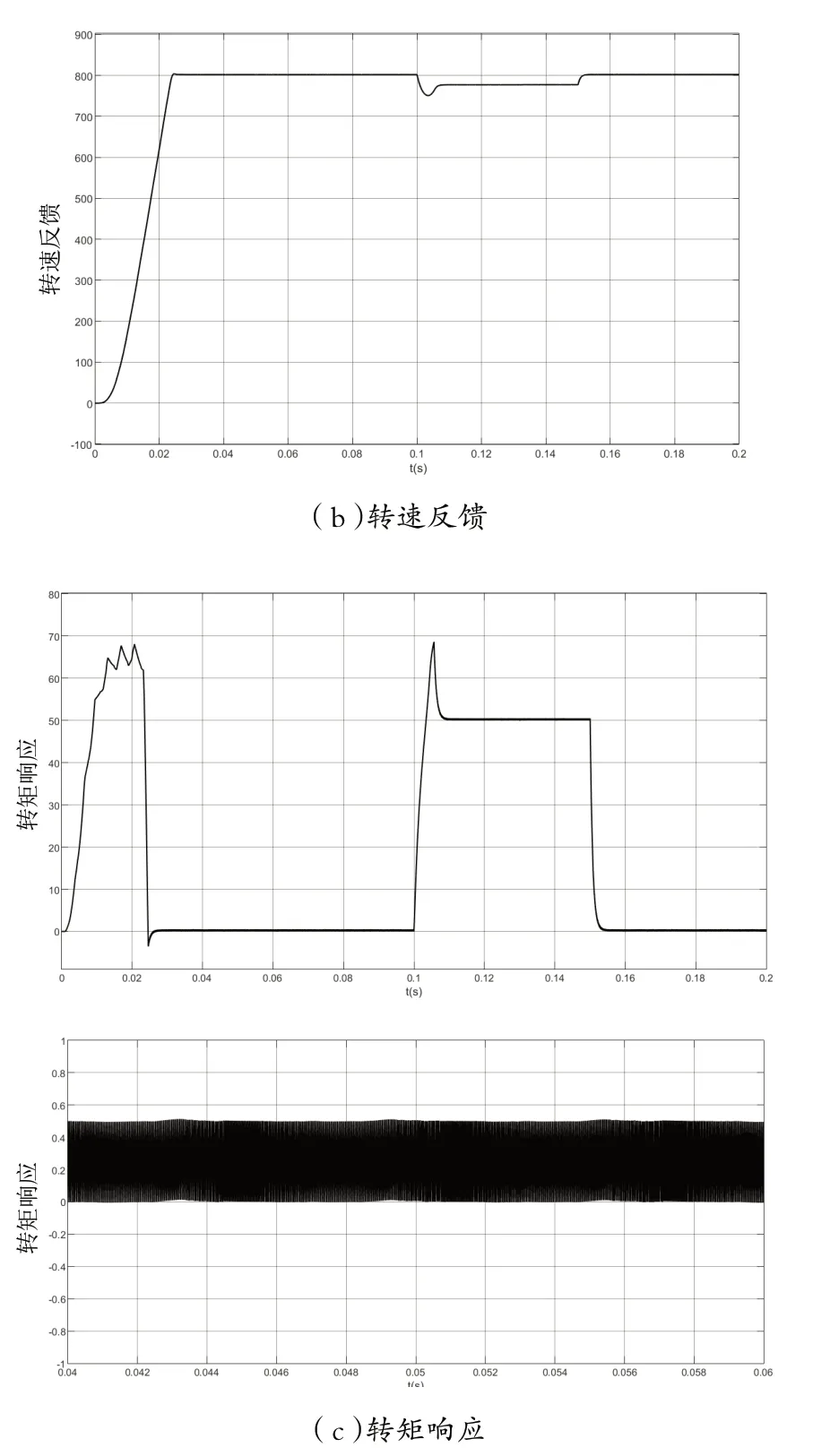
圖7 加入零矢量的DTC算法
對比圖6和圖7,可以得到以下結論:1)零矢量的加入,不影響定子磁鏈;2)零矢量的加入使得轉速超調更小;3)加入零矢量的DTC相比于傳統的DTC,轉矩波動明顯減小。
3 結論
直接轉矩控制由于其快速響應特性,廣泛應用于異步電機控制領域,然而,傳統的直接轉矩控制存在轉矩波動等問題,影響了其控制性能。利用零矢量具有保持轉矩的特性,將其加入到異步電機轉矩控制當中,仿真結果表明,零矢量的加入能夠有效減小轉矩波動。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03