考慮履帶滑轉滑移的電驅動履帶車輛轉向控制
2021-11-15 07:35:50蓋江濤劉春生馬長軍沈宏繼
兵工學報 2021年10期
關鍵詞:控制策略
蓋江濤, 劉春生, 馬長軍, 沈宏繼
(1.中國北方車輛研究所, 北京 100072;2.車輛傳動重點實驗室, 北京 100072;3.63963部隊, 北京 100072)
0 引言
在履帶車輛的實際轉向過程中,總是伴隨著高速側履帶接地段的滑轉和低速側履帶接地段的滑移[1]。國內外學者針對考慮履帶打滑的車輛轉向機理進行了深入研究[2-7],在考慮高速履帶車輛轉向離心力和履帶滑動的條件下,根據剪切應力- 剪切位移關系模型,建立了計算兩側履帶與地面之間作用力、轉向阻力矩、轉向半徑、轉向角速度等參數的運動學和動力學模型。分析研究結果表明,與傳統轉向理論的計算結果相比,考慮履帶與地面之間滑動時的轉向半徑是傳統理論計算值的1.5倍甚至更高,實際轉向角速度是理論轉向角速度的50%~65%. 以上文獻中建立的轉向方程均為復雜的超越方程,只能通過數值計算迭代求解,但其研究結果可為電驅動履帶車輛轉向機構的設計和轉向控制提供理論支持。
傳統液力機械綜合傳動車輛的轉向控制是開環的,無法實現較精確的轉向軌跡控制。對于電驅動履帶車輛,由于電機優良的調速特性,車輛的精確轉向控制是有條件實現的。為保證電驅動履帶車輛的精確轉向,在解算電機控制指令時需要考慮車輛轉向過程中履帶滑轉滑移的影響,以準確實現轉向目標。目前,電傳動履帶車輛轉向控制策略有轉速控制策略及轉矩控制策略,但是均未考慮履帶打滑對轉向軌跡控制精度影響[8-12]。本文對表征履帶車輛轉向過程滑轉滑移特性的轉向半徑修正系數及轉向角速度修正系數進行分析,在此基礎上提出考慮履帶滑轉滑移的轉向控制策略,利用轉向半徑修正系數及轉向角速度修正系數對驅動電機轉速控制指令進行修正,精確實現了電驅動履帶車輛的轉向目標。結果表明,本文提出的控制策略可應用于無人履帶車輛的轉向軌跡精確控制。
1 電驅動履帶車輛轉向特性分析
1.1 履帶滑轉滑移條件下的車輛轉向特性
圖1所示為履帶車輛轉向平面運動示意圖。圖1中,B為履帶中心距,L為履帶接地段長度,C為車輛幾何中心,Ol與Oh分別為低速側履帶與高速側履帶的瞬時轉向中心,Cl、Ch分別為內側、外側履帶接地面中心,Os為車輛實際瞬時轉向中心,Ot為車輛理論瞬時轉向中心,Sl與Sh分別為低速側履帶與高速側履帶瞬時轉向中心的橫向偏移量,ωs為車輛實際轉向角速度,ωt為車輛理論轉向角速度,Rs為實際轉向半徑,Rt為理論轉向半徑,vs,l為低速側履帶實際卷繞速度,vs,h為高速側履帶實際卷繞速度,vt,l為低速側履帶理論卷繞速度,vt,h為高速側履帶理論卷繞速度。
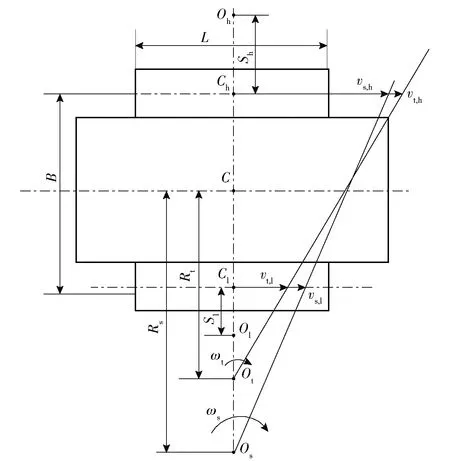
圖1 履帶車輛轉向平面運動示意圖Fig.1 Steering plane motion diagram of tracked vehicle
對履帶滑轉滑移條件下的車輛轉向運動學特性進行分析。
定義轉向半徑修正系數fρ為履帶車輛實際相對轉向半徑ρs與理論相對轉向半徑ρt的比值:
fρ=ρs/ρt=Rs/Rt.
(1)
定義轉向角速度修正系數fω為ωs與ωt的比值:
fω=ωs/ωt.
(2)
車輛理論相對轉向半徑及理論轉向角速度[1]為
(3)
式中:Ωz,l、Ωz,h分別為低速側與高速側主動輪轉速(rad/s);Kv為低速側與高速側主動輪轉速比,Kv=Ωz,l/Ωz,h;rz為主動輪半徑(m)。
在轉向過程中,履帶接地段在某一瞬時可以看作繞其瞬時轉向中心做旋轉運動,因此分析內側、外側履帶接地面中心Cl和Ch的速度,由牽連速度、相對速度及絕對速度的關系可以得到
(4)
由(4)式可以得到
(5)
式中:λ為履帶接地段長度與履帶中心距之比,λ=L/B;sl、sh分別為低速側和高速側履帶瞬時轉向中心橫向相對偏移量,sl=Sl/(L/2),sh=Sh/(L/2)。
由此,可以得到轉向半徑修正系數及轉向角速度的計算式分別為
(6)
根據文獻[4]可以得到滑轉滑移條件下兩側履帶瞬時轉向中心橫向相對偏移量的方程為
(7)
式中:f為滾動阻力系數;β為履帶與地面的摩擦系數。
在一定路面條件和車輛參數下,求解(6)式、(7)式,可以得到各理論轉向半徑下的轉向半徑修正系數和轉向角速度修正系數。根據以上計算步驟,計算得到轉向半徑修正系數及轉向角速度修正系數與路面條件(用路面滾動阻力系數f與附著系數φ之比進行表征,該值越大,表明路面條件越惡劣,越小則表明路面條件越好)及理論轉向半徑之間的關系曲面,分別如圖2和圖3所示。
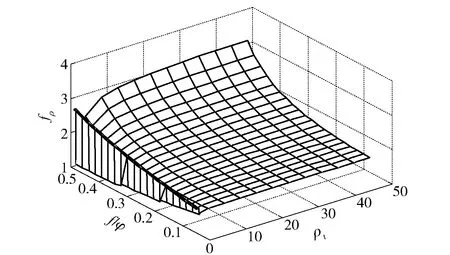
圖2 轉向半徑修正系數曲面Fig.2 Steering radius correction factor surface
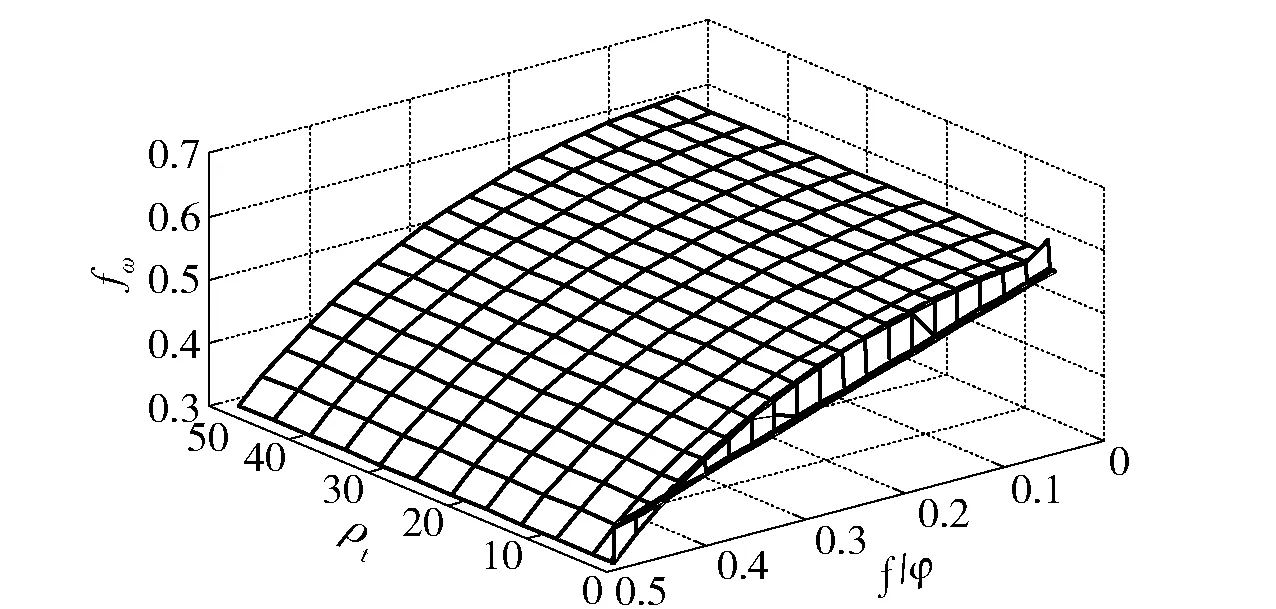
圖3 轉向角速度修正系數曲面Fig.3 Steering angular velocity correction factor surface
從圖2中可以看出:當ρt>0.5時,在一定的路面條件下,轉向半徑的修正系數大于1.5,且隨相對轉向半徑的增大近似非線性增大;當達到某一個相對轉向半徑后,修正系數變為恒定值;轉向半徑修正系數呈非線性增長到轉變為定值所對應的相對轉向半徑值逐漸增大,并且路面條件越好,該定值(即轉向半徑修正系數最大值)越小。從圖3中可以看出:地面條件越差,轉向角速度修正系數越小;地面條件較好的情況下,轉向角速度修正系數越大,在0.60~0.65范圍內,且不隨相對轉向半徑變化而變化。
1.2 雙側電機耦合驅動系統運動學特性
某雙側電機耦合驅動系統簡圖[13-14]如圖4所示。圖4中:傳動裝置由兩個驅動電機及其減速排、功率耦合機構及兩側的變速排組成;功率耦合機構由若干行星排構成;ij為電機減速排傳動比;kd為耦合機構行星排參數;變速排為兩擋,傳動比分別為ib1、ib2,將其寫成集合的形式為ib={ib1,ib2}。
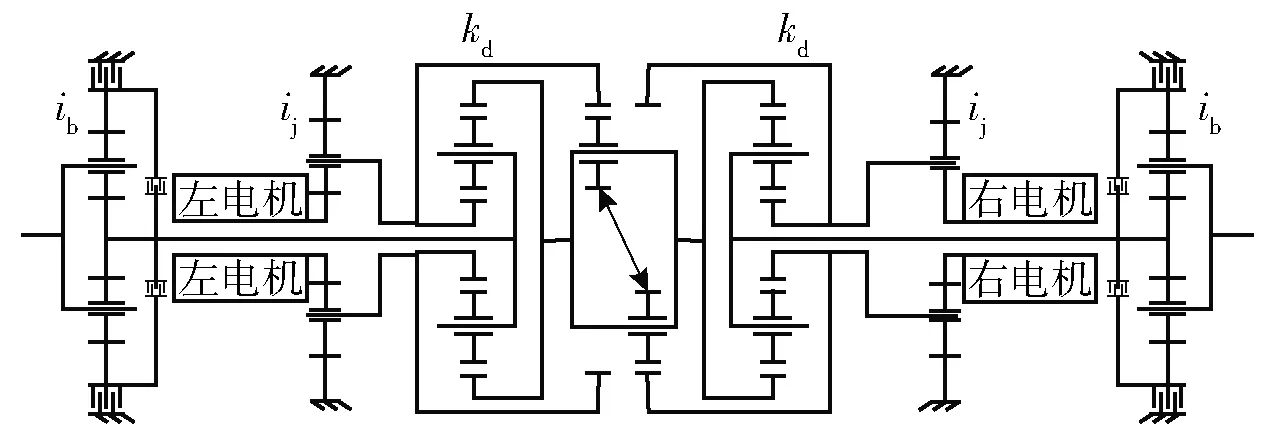
圖4 雙側電機耦合驅動系統簡圖Fig.4 Structural sketch of dual motor coupling drive transmission
由圖4可知:雙側電機輸出轉速相同時,車輛直線行駛;雙側電機輸出轉速不同時,車輛差速轉向。功率耦合機構是實現雙側電機耦合驅動的關鍵,它可以將部分或全部轉向再生功率由低速側履帶傳遞至高速側履帶。
相比于液力機械綜合傳動車輛,電機轉速、功率等相關數據較容易獲得,因此可以通過驅動電機轉速計算兩側主動輪轉速,從而獲得理論相對轉向半徑,并利用預先計算得到的轉向半徑修正系數數據進行查表,得到對應的轉向半徑修正系數,從而得到車輛實際轉向半徑,以進行轉向運動軌跡控制。
對圖4所示雙側電機耦合驅動系統進行運動學分析[15],得到其輸入輸出轉速的變換關系為
(8)
式中:nm,l和nm,h分別為低速側和高速側電機轉速(r/min);ic為側傳動比。
由(3)式、(8)式,可得車輛理論相對轉向半徑為
(9)
車輛理論轉向角速度為
(10)
常用的轉向阻力系數計算公式為尼基金提出的經驗公式:
(11)
式中:μmax為坦克做制動轉向時的最大阻力系數,該值由試驗獲得。
(1)式代入(11)式,可以得到轉向阻力系數為
(12)
2 考慮履帶滑轉滑移的轉向控制策略
2.1 轉向控制策略設計
2.1.1 駕駛操縱信號歸一化處理
為方便解算電機轉速控制指令,將加速踏板開度信號及方向盤轉角信號進行歸一化處理[16]。
1)加速踏板開度信號歸一化處理:
(13)
式中:Sa為歸一化加速踏板開度,0≤Sa≤1;α為實際加速踏板轉角;α0為加速踏板空程;αmax為加速踏板最大轉角。
2)方向盤轉角信號歸一化處理:
(14)
式中:Ss為歸一化方向盤轉角;θ為實際方向盤轉角;θ0為方向盤空程;θmax為方向盤最大轉角。
2.1.2 轉向目標與駕駛操縱信號映射關系定義
利用加速踏板信號、轉向盤信號,根據駕駛習慣可定義下述映射關系。
1)目標車速與加速踏板開度的映射關系:
(15)
式中:v*為目標車速(km/h);vmax為最大車速(km/h);nmax為電機最高轉速(r/min)。
2)目標相對轉向半徑與方向盤轉角的映射關系:
(16)
式中:ρ*為目標相對轉向半徑;kib為與擋位及駕駛風格有關的調整系數。
3)目標轉向角速度與油門踏板開度及方向盤轉角的映射關系:
(17)
式中:ω*為目標轉向角速度。
2.1.3 轉向控制策略設計
若不考慮履帶滑移滑轉,則根據運動學分析結果及轉向控制目標映射關系,可以得到轉向過程電機轉速控制指令為
(18)
式中:nm,L和nm,R分別表示不考慮履帶滑移滑轉時左側和右側電機的轉速控制指令(r/min)。考慮到履帶的滑轉滑移,這組目標轉速指令并不能保證精確實現轉向控制目標,必須針對履帶滑轉滑移造成的實際轉向半徑變大來加以修正。
1)當不考慮履帶滑動時,要達到目標轉向半徑ρ*及目標轉向角速度ω*,則低速、高速兩側電機轉速nm,l和nm,h應當滿足:
(19)
2)當考慮履帶滑動時,實際轉向半徑和理論轉向半徑有如下關系:
ρs=fρρt.
(20)
3)要達到目標轉向半徑ρ*,則低速、高速兩側電機轉速n′m,l和n′m,h應當滿足:
(21)
4)當考慮履帶滑動時,實際轉向角速度和理論轉向角速度有如下關系:
ωs=fωωt.
(22)
5)當考慮履帶滑動時,要達到實際轉向角速度ω*,則低速、高速兩側電機轉速n′m,l、n′m,h應當滿足:
(23)
由(17)式、(19)式、(21)式,可得考慮履帶打滑前后電機轉速的相互關系為
(24)
求解(24)式,可以得到n′m,l、n′m,h與nm,l、nm,h的關系為
(25)
令
(26)
實際上,n′m,l、n′m,h為考慮履帶滑動后實際需要的低速側和高速側電機轉速,nm,l、nm,h為不考慮履帶滑動時的低速側和高速側電機轉速。由于修正系數矩陣ξ為對稱矩陣,仍然可以利用ξ對左右側電機轉速控制指令進行修正(見(27)式),而不用區分低速側和高速側電機:
(27)
式中:n′m,L和n′m,R分別為經過修正后的左側和右側電機轉速控制指令(r/min)。
進行轉速控制指令限幅后,得到轉向過程電機轉速控制指令為
(28)
2.2 轉向控制策略仿真
轉向半徑修正系數與轉向角速度修正系數與理論轉向半徑之間的關系寫入控制程序,在車輛轉向過程中,通過電機轉速計算車輛理論轉向半徑,通過查表得到轉向半徑修正系數與轉向角速度修正系數,對電機轉速控制指令進行修正,精確實現目標轉向半徑。
基于MATLAB/Simulink軟件建立了電驅動車輛轉向工況仿真模型,如圖5所示,其中車輛模型為考慮履帶打滑的車輛轉向模型[17]。
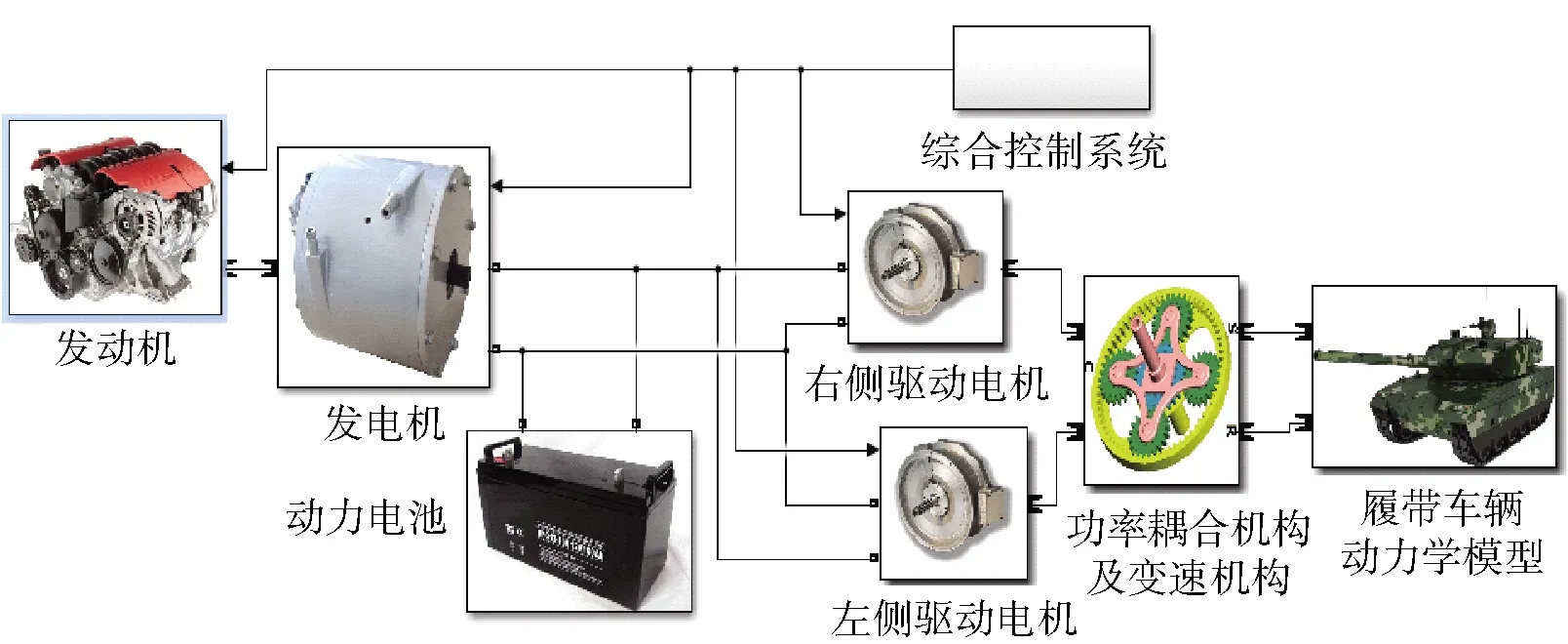
圖5 電驅動履帶車輛轉向仿真模型Fig.5 Steering simulation model of electric drive tracked vehicle
分別采用不考慮履帶滑轉滑移的轉向控制策略和考慮履帶滑轉滑移的轉向控制策略進行仿真,對比分析兩種情況的仿真結果。仿真路面設定為水泥路面,控制模型中采用的轉向半徑修正系數及轉向角速度修正系數與理論相對轉向半徑之間的關系曲線如圖6所示。
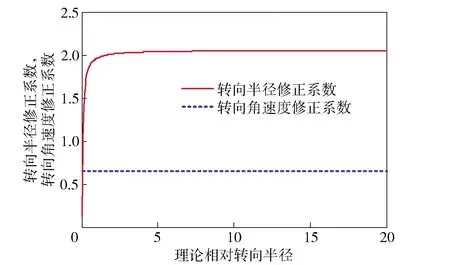
圖6 水泥路面轉向半徑修正系數及轉向角速度修正系數Fig.6 Correction factor curves of steering radius and steering angular velocity of tracked vehicle on cement pavement
圖7所示為不考慮及考慮履帶滑轉滑移時的轉向控制策略的仿真結果對比。兩次仿真采用相同的操縱信號,如圖7(a)所示。
由圖7可知:考慮履帶滑轉滑移時,0~100 s兩側電機轉速控制指令相同,車輛直駛;21 s左右車速達到8.5 km/h. 不考慮履帶滑轉滑移時,100~126 s左右兩側驅動電機轉速控制指令分別為1 846 r/min及-80 r/min,車輛相對轉向半徑仿真結果為4.3;126~160 s左右兩側驅動電機轉速控制指令分別為1 720 r/min及80 r/min,車輛相對轉向半徑仿真結果為5.6;160~220 s左右兩側驅動電機轉速控制指令分別為1 620 r/min及180 r/min,車輛相對轉向半徑仿真結果為7.0. 由此可以看出,由于沒有考慮轉向過程履帶打滑的影響,車輛相對轉向半徑無法達到目標相對轉向半徑。
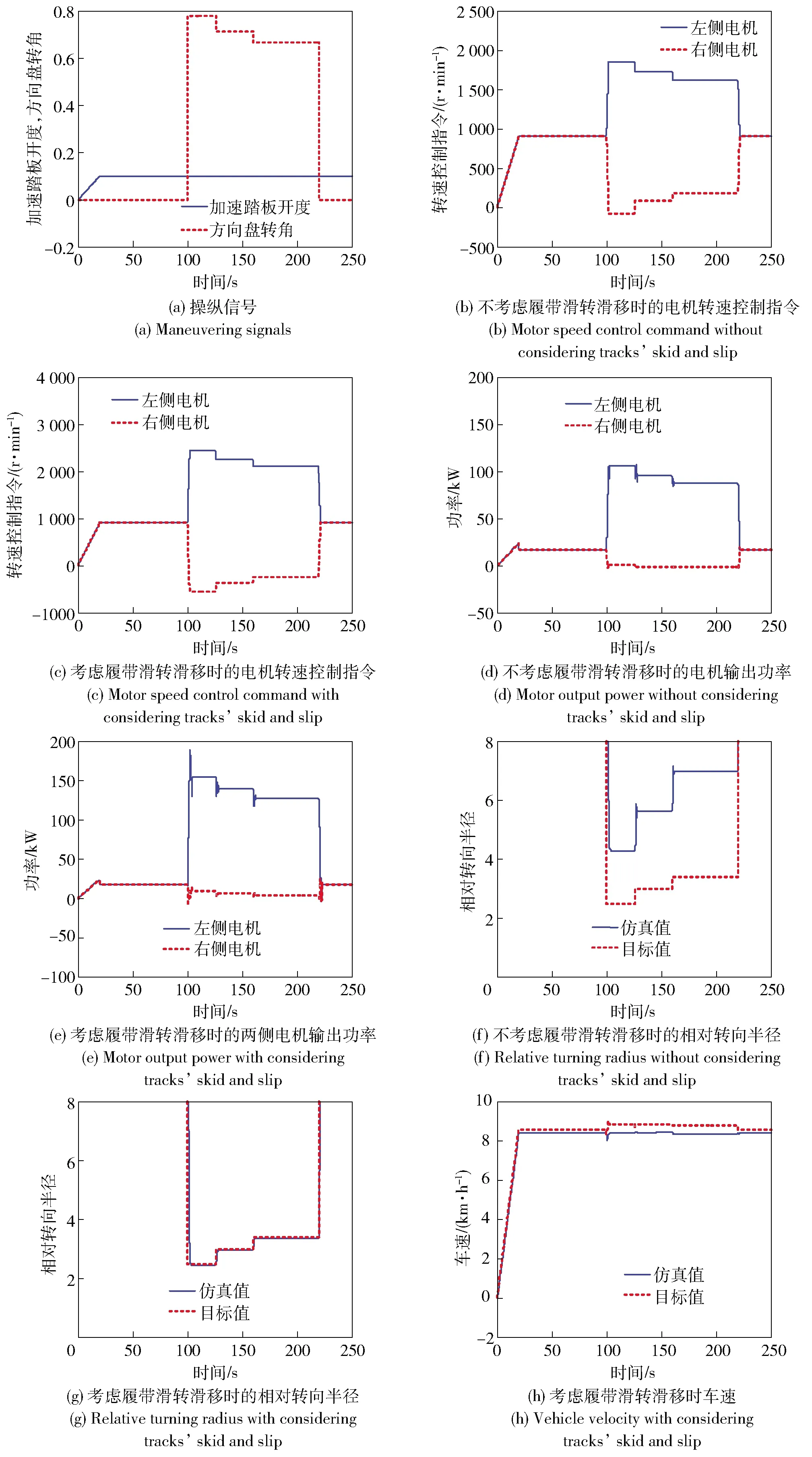
圖7 轉向控制策略對比仿真結果Fig.7 Simulated results of steering control strategy
考慮履帶滑轉滑移時:100~126 s左右兩側驅動電機轉速控制指令分別為2 420 r/min及-562 r/min,車輛相對轉向半徑仿真結果為2.5;126~160 s左右兩側驅動電機轉速控制指令分別為2 237 r/min及-378 r/min,車輛相對轉向半徑仿真結果為3;160~220 s左右兩側驅動電機轉速控制指令分別為2 100 r/min及-260 r/min,車輛相對轉向半徑仿真結果為3.4,基本能夠達到目標相對轉向半徑。由此可以看出:考慮履帶打滑影響后,兩側電機的目標轉速差大于不考慮履帶打滑影響時的目標轉速差;不考慮履帶打滑影響時,由于履帶滑轉滑移使得實際轉向半徑大于目標半徑,電機輸出功率小于考慮履帶打滑的轉向控制時的輸出功率。由于轉向半徑修正系數與轉向角速度修正系數與實際存在一定的偏差,仿真車速與目標車速存在不大于6%的偏差。
3 考慮履帶滑轉滑移的轉向控制試驗驗證
車輛進行水泥路面轉向試驗,對考慮履帶滑轉滑移的轉向控制策略進行試驗驗證。圖8所示為轉向控制策略試驗場地,在圖中紅色圓圈所示的區域內進行轉向,通過總線記錄儀對總線網絡數據進行采集保存。

圖8 轉向控制策略試驗場地Fig.8 Steering control strategy test site
目標轉向半徑為48 m,目標相對半徑ρ*=18,根據轉向控制目標映射規則,方向盤轉角歸一化值Ss=0.29,即方向盤向右轉至右側最大行程的1/3處左右。由于在駕駛員實際操縱中方向盤不可能與目標值完全吻合,只能盡量接近,并且在試驗中要求駕駛員在不出現危險的情況下,將方向盤轉至目標位置后便不允許再轉動,以驗證本文提出的考慮履帶滑轉滑移的轉向控制策略。目標車速定為v*=40 km/h,駕駛員可以根據儀表盤上顯示的車速調節油門踏板開度。
3.1 試驗1:采用不考慮履帶滑轉滑移的轉向控制策略
圖9所示為車輛進行轉向試驗的結果,其中圖9(a)為駕駛員按照要求給出的轉向操縱信號,油門踏板開度維持在0.52左右,從13 s開始駕駛員開始緩慢向右轉動方向盤,在28 s左右方向盤轉至右側最大行程的1/3處左右。如圖9(e)所示,實際相對轉向半徑約ρs=37,從中可以看出由于未考慮履帶滑轉滑移的影響,實際半徑值約為目標值的2.1倍。
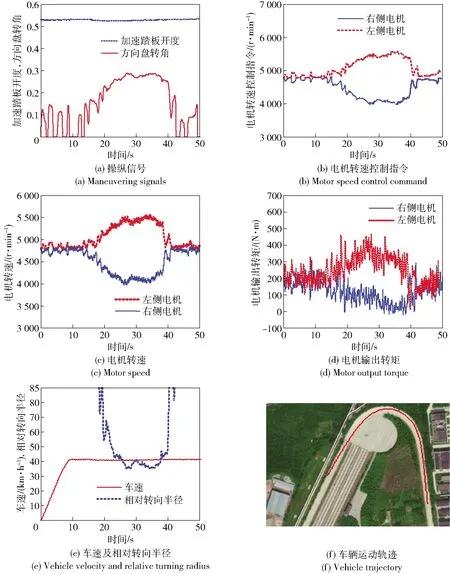
圖9 不考慮履帶滑轉滑移的轉向控制策略試驗結果Fig.9 Test result of steering control strategy without considering tracks’ skid and slip
3.2 試驗2:采用考慮履帶滑轉滑移的轉向控制策略
圖10所示為采用考慮履帶滑轉滑移的轉向控制策略進行轉向試驗的結果。圖10(a)為駕駛員按照要求給出的轉向操縱信號,油門踏板開度維持在0.55左右,從15 s開始駕駛員開始緩慢向右轉動方向盤,在30 s左右方向盤轉至右側最大行程的1/3處左右。電機轉速控制指令如圖10(b)所示,對比試驗1的結果可以看出,由于考慮了履帶滑轉滑移的影響,兩側電機轉速差增大。如圖10(e)所示,轉向基本穩定時實際相對轉向半徑約為19,實際半徑值基本達到目標值,最終轉向半徑的控制偏差為5.6%.
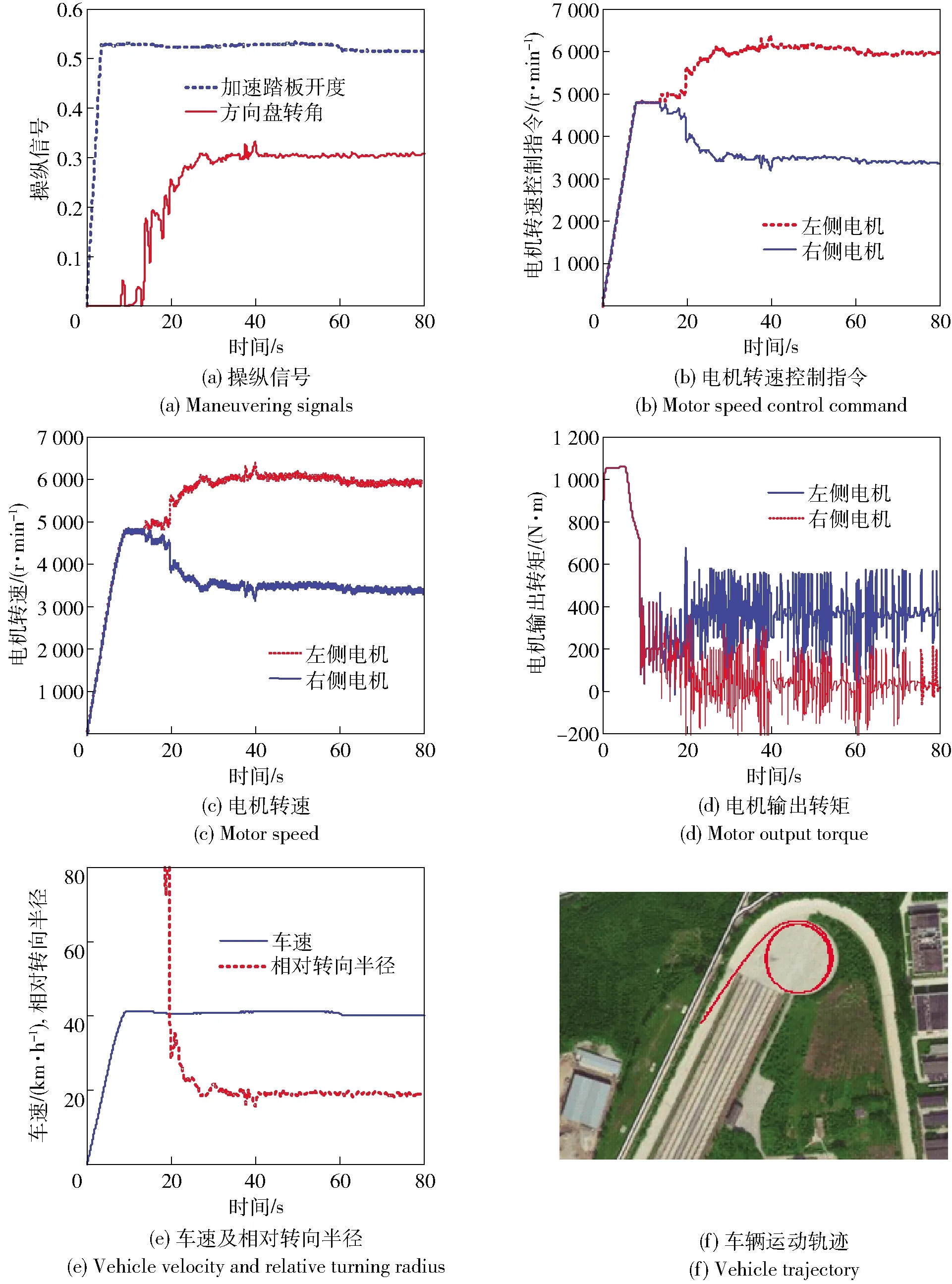
圖10 考慮履帶滑轉滑移的轉向控制策略試驗結果Fig.10 Test result of steering control strategy with considering tracks’ skid and slip
4 結論
本文履帶車輛轉向過程滑轉滑移特性進行了分析,提出了考慮履帶滑轉滑移的轉向控制策略,進行了電驅動履帶車輛轉向控制策略仿真及試驗驗證。通過對比試驗結果可以看出:不考慮履帶滑轉滑移時,車輛實際轉向半徑為目標轉向半徑的2倍;采用考慮履帶滑轉滑移的轉向控制策略后,車輛轉向半徑的控制偏差為5.6%,提高了轉向控制的精確度。綜上所述,本文提出的考慮履帶滑轉滑移的轉向控制策略具有較好的控制效果。結合路面識別技術,該策略未來可應用于無人履帶車輛的轉向軌跡精確控制。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36