工業互聯網感知通信控制協同融合技術研究綜述
2021-11-14 08:23:32田輝賀碩林尚靜范紹帥聶高峰蔣秀蓉
通信學報 2021年10期
田輝,賀碩,林尚靜,范紹帥,聶高峰,蔣秀蓉
(1.北京郵電大學網絡與交換技術國家重點實驗室,北京 100876;2.鄭州大學信息工程學院,河南 鄭州 450001;3.北京郵電大學安全生產智能監控北京市重點實驗室,北京 100876)
1 引言
制造業是國民經濟的主體,是立國之本、興國之器、強國之基。工業互聯網是全球工業體系智能化變革的重要推手,將具有感知、監控能力的各類采集或控制器以及泛在技術、移動通信、智能分析等技術不斷融入工業生產的各個環節,最終將傳統工業推動到智能化的新階段。早在1948 年,“控制論之父”諾伯特·維納在他的經典著作《控制論:或關于在動物和機器中控制和通信的科學》中指出:“控制系統應該作為一個復雜的、連鎖的反饋閉環。”從系統科學的角度重新審視工業互聯網,可以發現,工業互聯網是一個多尺度、多相流耦合的復雜系統,如圖1 所示。

圖1 “感知-通信-控制”融合多尺度、多相流耦合復雜系統
然而,現有工業互聯網通常將傳感系統、通信系統和控制系統作為獨立的子系統分別優化設計。其面臨如下3 個方面的問題。
首先,工業互聯網在底層通信鏈路存在“不可靠性”。工業現場環境存在嚴重的電磁干擾。工業電網、高頻振動、電弧等對無線通信干擾嚴重,工業生產與監控系統中存在大量的異構通信設備,如采用局域網技術的傳感器設備、采用廣域網4G、5G 技術的CPE(customer premises equipment)中繼或者基站設備等,這些設備共享有限的無線信道也會造成同頻干擾。此外,廠房中遍布的金屬器械等會對無線信號造成衰落和陰影等影響。復雜動態變化的工業環境將不可避免地影響無線傳輸的實時性和可靠性。通信傳輸過程中的時延或者丟包將直接影響工業控制系統決策的準確性,以及對現場設備控制的穩定性。因此,工業互聯網中通信系統的設計,不能僅考慮優化本地的通信網絡參數,同時應該考慮控制系統的穩定性約束。
其次,工業互聯網在前向感知-通信鏈路存在“不準確性”。一方面,傳感器設備硬件資源的限制導致分布在不同物理空間的終端僅能獲得工業設備狀態或者工業生產過程參數的局部信息,這些局部信息之間不僅存在偏差,甚至是自相矛盾的。通過擴展傳感器節點在時間和空間的覆蓋范圍,可以提高感知準確性。然而,僅僅通過增加工業現場中傳感器數量的方式解決信息感知的“不準確性”會導致通信網絡傳輸負荷的增加,影響控制決策的時效性。另一方面,現代工業生產流程的復雜性導致工業現場環境中不僅存在以溫度、轉速、壓力等模擬量和開關量為代表的結構化信息,同時存在以大量高清視頻、圖像聲音為代表的非結構化信息。傳感器終端將大量的未經分析融合的非結構化信息直接傳到工業控制系統進行決策處理,會進一步增加通信網絡的傳輸負荷,并且影響后續控制決策的準確性。因此,工業互聯網中感知系統的設計,不能僅考慮感知系統本身的優化,同時應該考慮通信系統的通信能力約束。
最后,工業互聯網在反向控制-通信鏈路存在“不確定性”。隨著工業生產系統向大型化和復雜化方向發展,生產過程呈現多子系統緊密耦合的特征,耦合關系復雜,非線性特征明顯。一個子系統內部的單點攝動、感知誤差、交互時延等不確定性均會通過物理網絡的耦合及通信網絡的連接由此及彼地傳播擴散,產生級聯震蕩,嚴重影響整個工業系統的穩定性。因此,對生產過程的控制和優化,除了需要考慮單個生產裝置或局部子系統性能外,更需兼顧整個系統的全局優化。因此,工業互聯網中控制系統的設計,同樣不能僅考慮對系統物理量的控制優化,必須將感知系統和通信系統作為自身系統的一部分進行聯合優化設計。
目前,國內外學者和研究機構提出了控制通信一體化[1]、物理信息系統[2]和分布式人工智能[3]等未來工業技術。但是,現有的研究弱化了通信技術在閉環系統中所發揮的級聯橋接效應,沒有對通信系統在工業復雜耦合系統中的作用給予足夠的重視。工業互聯網感知通信控制協同融合技術的研究仍處于起步階段。
為了進一步推動工業互聯網感知通信控制協同融合技術的發展,本文主要綜述了工業互聯網感知通信控制協同融合技術方面的相關研究。首先,以信息的流轉為引線介紹了工業互聯網感知-通信-控制三要素之間的復雜耦合關系;然后,圍繞工業互聯網中感知通信控制協同融合問題,對國內外研究現狀進行了綜述分析,并總結了現有研究面臨的問題;最后,對工業互聯網感知通信控制融合系統中的解耦機制、高可靠通信、感知通信融合和穩定性控制等開放性研究問題進行了細致的討論和分析。
2 感知-通信-控制三要素間的復雜耦合關系
工業互聯網中,一個任務的完成需要通過信息在感知流、通信流和控制流之間的高效有序傳遞才能實現。圖2 給出了典型工業互聯網復雜系統中感知流、通信流和控制流之間的復雜耦合關系。
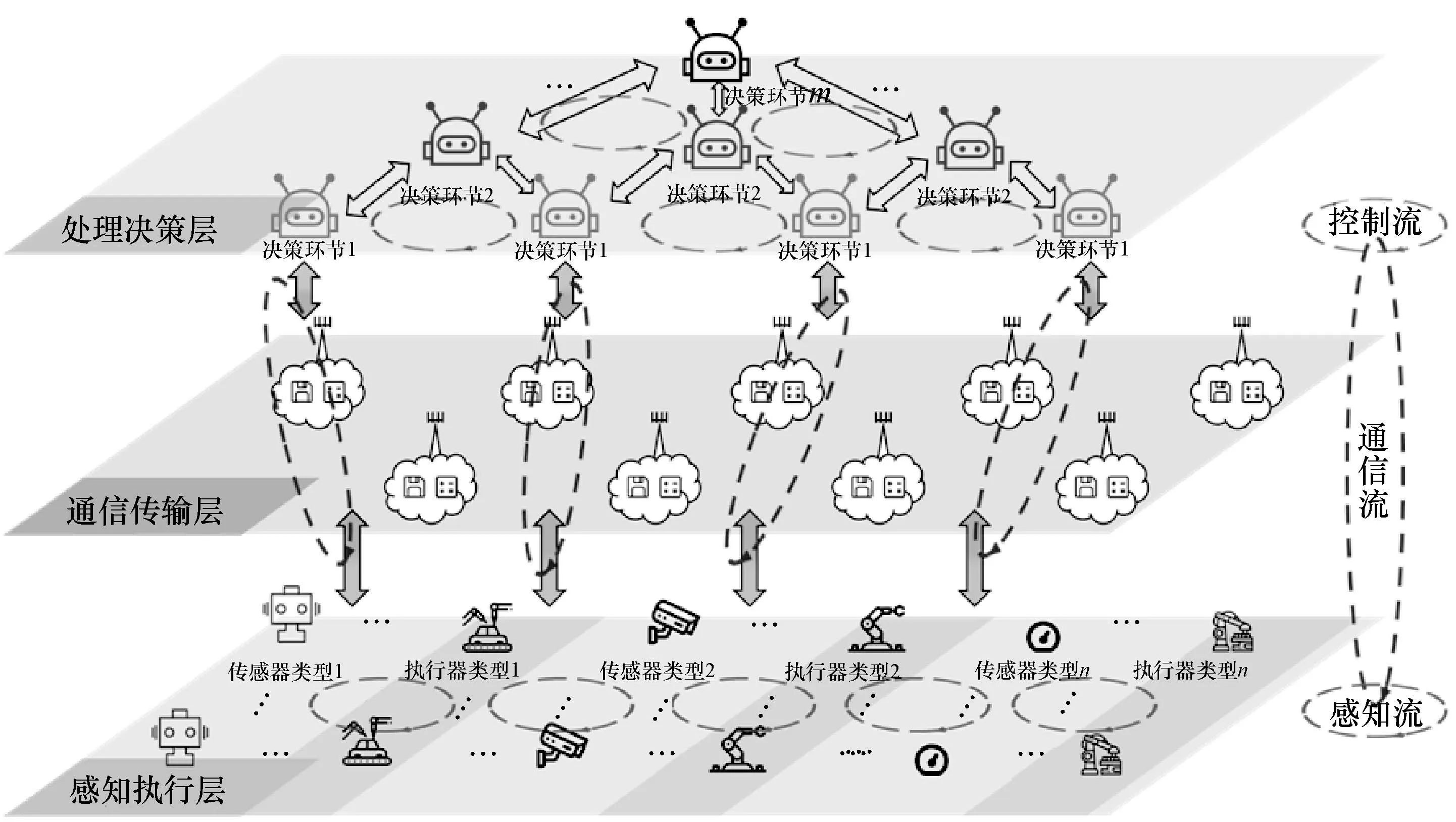
圖2 感知流、通信流和控制流耦合關系
從本質上講,感知流、通信流和控制流是通過信息流在感知執行層、通信傳輸層和處理決策層上耦合在一起的。一條信息流從生成到失效會經歷4 個階段,即信息的收集、信息的傳遞、信息的處理決策和信息的執行。完整的工業互聯網產品的生產過程需要源源不斷的信息流的驅動。感知執行層包括多種不同功能的傳感器和具備執行功能的執行器。傳感器主要負責信息的收集,而執行器則根據控制指令完成信息的執行。得益于感知器的多樣性,感知信息的承載業務形式包括圖像、視頻、音頻及零星小數據(如表征溫度、濕度、電壓、電流等)等。通信傳輸層由若干無線基站組成,負責將收集到的信息交付給處理決策層,并將處理決策層的決策執行指令下達至感知執行層。信息在通過通信傳輸層時會被抽象為信息傳輸的約束條件(如時延、可靠性、數據速率等),屏蔽不同信息感知的承載業務差異。處理決策層則根據收集到的信息進行信息處理,并根據處理結果下達控制指令。由于信息收集的規模和處理規則的不同,處理決策層包括多個處理環節。
由于信息流的時序因果特性,工業互聯網中的感知執行層、通信傳輸層和處理決策層的耦合呈現序貫特性,即通信傳輸層作為中間層將感知執行層與處理決策層耦合在一起。在感知執行層,信息的收集由多種時空分布不均勻的感知節點組成。快速進行感知數據的收集和處理是保證信息流準確性的基礎。然而,從感知數據產生的原始數據需要經過通信傳輸層到達處理決策層進行處理。在處理決策層,信息經過處理后生成時序控制決策。這些時序控制決策通過通信傳輸層的有序控制指令傳遞,下達至感知執行層的執行節點。
3 國內外研究現狀與面臨的問題
由第2 節的介紹可以看出,工業互聯網中感知系統、通信系統和控制系統三者之間緊密耦合、序貫相通。本節將從感知計算、高可靠通信和通信控制3 個方面介紹工業互聯網中感知通信控制協同融合技術的研究現狀,并進一步分析現有研究面臨的問題。
3.1 面向工業互聯網的感知計算研究
傳統工業互聯網架構通常使用集中式服務器作為計算中心,以光電、溫度、壓力等各種傳感器(如二維條形碼讀取設備、RFID 標簽讀寫器、工業相機、高清攝像頭等)和變送器作為工業自動化生產控制過程的末端感知單元,并對采集的數據進行多維、異構數據融合處理,以支持服務器進行智能決策。
為了實現在工業互聯網應用場景中處理異構設備、快速配置與實現、在線服務生成等方面的智能互聯,文獻[4]通過靈活配置編程接入模塊連接異構的物理制造資源,提出了由定制的接入模塊、訪問中心和本地服務器組成的工業物聯網中心處理架構。文獻[5]提出了一種新的中間件體系結構——面向信息物理系統的實時數據分發服務,使傳感器數據能夠在高度不可預測的環境下及時、可靠地傳播。總的來說,傳統的工業互聯網更多地以集中式處理架構為基礎對數據進行融合處理。
然而,隨著制造工業智能化進程的推進,工業制造領域呈現海量異構智能終端設備連接的特性,這些工業設備將產生無法估計的數據量,同時智能終端的感知、計算、存儲能力相較以往均有很大提升,能夠實現對物理世界的大范圍、長時間、多維度的信息采集以及數據空時相關性的深度挖掘,相應的傳統工業采用的數據集中式處理模式在工業互聯網時代并不是最優的處理方案[6]。
邊緣計算等技術的出現,為感知任務的快速部署和感知數據的傳輸與處理提供了新的契機[7]。工業互聯網中的許多控制功能將通過本地設備完成而無須依賴于云端,計算卸載技術將感知數據的處理工作交給靠近感知數據源的邊緣計算設備;將分布式部署的單一功能傳感器采集到的多維、異質、非結構化信息進行融合匯聚、智能處理,增強感知系統容錯性,同時最大程度地發揮實時數據的價值,決策通過在邊緣設備之間共享數據和計算來完成,更有利于工業制造過程的管控。工業互聯網架構逐漸演進為“云-管-邊-端”模式,其中,“云”是指物聯網平臺云,“管”是指有線/無線通信方式,“邊”是指邊緣計算,“端”則涵蓋了智能傳感、智能終端和智能設備。基于上述模式,文獻[8]提出了一種基于軟件定義網絡(SDN,software defined network)的云-邊交互架構來處理工業互聯網環境下的大數據流,云-邊協同降低了傳統集中式云計算帶來的時延,中間件SDN 用于克服邊緣設備和云服務器之間的大量數據遷移導致的底層網絡擁塞,采用切比雪夫分解的多目標進化算法進行流量調度。文獻[9]基于SDN 架構,結合分層云和邊緣計算技術,提出了一種新的工業應用集中式計算卸載策略——軟件定義工業網絡體系結構,解決了工業互聯網中資源利用、數據處理和系統兼容性等缺陷。
為了獲得云-邊協同模式最優的卸載策略,已有許多研究考慮不同用戶場景下的任務劃分和任務分配問題。文獻[10]在功率受限的網絡下,通過馬爾可夫決策過程(MDP,Markov decision process),利用一維搜索算法實現移動設備的任務卸載決策。類似地,文獻[11]基于MDP 問題建模,在異構網絡下將任務狀態分為9 種類型,提出時空計算卸載決策算法,實現了給設備任務分配相應的傳輸時隙和卸載到最合適的邊緣服務器的策略。文獻[12]在多用戶場景中,采用啟發式算法解決卸載決策和資源分配問題,根據設備的計算頻率和產生數據量大小來定義任務的優先級,以此來部署信道資源和邊緣服務器的頻率資源。
目前,關于工業互聯網環境中涉及的節點能源資源、計算資源、緩存資源、頻譜資源等不同資源間的聯合優化已有大量研究。文獻[13-15]對計算資源和無線資源進行聯合優化,文獻[16-20]對計算資源和能源進行聯合優化,文獻[21-23]研究了無線資源和能源的聯合優化,文獻[24-26]研究了無線資源和存儲資源的聯合優化方案等。不同服務器間的資源遷移相關研究較少,文獻[27]主要研究了基于貝爾曼-福特方法的低復雜度分布式遷移技術,文獻[28-29]研究了基于激進獎勵機制的資源遷移技術等。
工業互聯網場景中全面的感知計算階段、泛在的互聯互通階段、深度的智能控制階段是密不可分的,現階段基于邊緣計算的傳感器信息處理卸載技術未能很好地考慮工業現場環境中的時延約束,無法滿足計算密集型和時延敏感型感知任務的需求,基于邊緣計算的工業互聯網時延約束下的傳感器感知任務卸載,以及霧計算節點之間任務卸載均有待進一步研究。
3.2 面向工業互聯網的高可靠通信研究
面向工業互聯網場景的通信技術的關鍵指標是低時延和高可靠。在5G 技術出現之前,針對工業互聯網的研究主要集中在無線傳感器網絡(WSN,wireless sensor network)和工業監控網絡。文獻[30]對WSN 中時隙媒體接入控制(MAC,media access control)的超幀結構進行了研究,以在滿足各種不同條件下最小化MAC 訪問時延,但忽略了工業環境中的能量消耗問題,無法在實際的工業互聯網場景中實現。文獻[31]研究了WSN 中的聚合調度問題,提出了一種高效的分布式調度算法,降低了時延。文獻[32]研究了工業監控網絡中的匯聚傳輸調度問題,提出了一種時延最優的調度策略,但不能在給定的時延約束下最大化其可靠性。針對引入視覺能力的WSN,文獻[33]提出了一種基于事件公平的調度方案,以減少事件報告時延。該方案能實現一定程度的性能提升,但仍然不支持在傳感器上傳輸實時視頻。文獻[34]針對事件監控的M2M 應用,引入了一種預測資源分配算法,該算法利用組內M2M 設備流量模式的相關性,顯著降低了平均上行時延。以上傳統研究成果都在一定程度上提升了通信網絡的低時延性能,但仍未能滿足工業互聯網中的毫秒級時延需求。
伴隨著5G 技術的興起,超可靠低時延通信(uRLLC,ultra-relaible and low latency communications)被引進,以實現包括工業互聯網場景在內的關鍵機器通信。目前,面向工業互聯網的5G 技術主要從非正交多址接入(NOMA,non-orthogonal multiple access)、免調度傳輸、大規模多輸入多輸出(massive MIMO)、多連接以及短子幀結構等方面研究uRLLC。
在NOMA 技術研究方面,業界提出了一些基本的方案,包括稀疏編碼多址接入(SCMA,sparse code multiple access)方案和多用戶共享接入方案等[35-36]。針對工業自動化場景,文獻[37]研究了NOMA 和協作NOMA 在可靠性要求、總能量和時延約束下,聯合優化塊長度和功率分配,最小化譯碼錯誤概率的問題;文獻[38]提出了一種基于SCMA 增強的全雙工方案,并分析了該方案在時延約束下的可靠性。NOMA 的引入為免調度傳輸提供了天然的空間,基于NOMA 實現免調度傳輸可以降低信令開銷和傳輸時延。
在免調度技術研究方面,文獻[39]對免調度傳輸系統的性能進行瞬時分析,推導出時延約束下的可靠性。文獻[40]針對5G 標準化中討論的基于停止-等待協議的機制和盲重傳機制,研究了這2 種上行免調度方案的性能,分析其在時延約束下的可靠性。
在massive MIMO 技術研究方面,文獻[41]針對基于毫米波的massive MIMO 系統提出了一種時延控制方法,在時延和可靠性約束下最大化網絡性能,以支持uRLLC。文獻[42]基于最小二乘信道估計研究了可以實現uRLLC 的多用戶massive MIMO技術,可以在時延有限和信道狀態信息不準確的條件下提高傳輸的可靠性。
在多連接技術研究方面,文獻[43]針對多連接提出了一個基于短碼塊的D2D 擴展系統的框架,用以實現uRLLC。文獻[44]研究了用戶在多連接條件下的聯合譯碼性能。
在短子幀技術研究方面,文獻[45]設計了一種通過減少符號時間實現的短子幀結構,減少了數據包的傳輸時延。這些針對uRLLC 的研究為實現工業互聯網中的超高可靠性和超低時延需求奠定了基礎。總而言之,在目前5G 技術標準體系之下,uRLLC 技術還未有統一的系統性方案,仍然有很多工作預計留至后續5G 標準體系研究[46]。
現有研究都只是從純通信技術的方向來實現工業互聯網中的低時延和高可靠需求。但是,在實際的工業現場流程中,通信和控制是緊密耦合在一起的,要真正達到工業互聯網中的通信技術指標,需要將通信問題放在控制環節一起解決。
3.3 面向工業互聯網的通信控制研究
自動控制理論的發展主要經歷了3 個階段:適用于單輸入單輸出線性對象的經典控制理論[47-50],適用于大型、復雜、高維、非線性和不確定性嚴重對象的現代控制理論[51-52],適用于未知或不確定性嚴重對象且不依賴對象模型的智能控制理論[53-55]。實際工業過程難以建立精確的數學模型,但可以方便地使用輸入、輸出與跟蹤誤差等數據,從而使基于數據的控制方法得到了極大的發展。目前工業界應用的控制系統大部分采用以跟蹤誤差為基礎的PID 控制技術,此外,工業界中也出現了如無模型控制、學習控制、模糊控制、專家控制、神經網絡控制、仿人行為的智能控制等基于數據的控制方法[56-59]。然而,PID控制器適用于具有線性動態特性的被控對象,難以適用于具有綜合復雜性的工業過程。因此,適合復雜工業過程的基于數據和數學模型相結合的先進控制技術的研究受到工業界的廣泛關注。針對一類具有非線性和不確定性,并且輸出被控變量不能在線直接連續測量的復雜對象,文獻[60]提出了一種基于智能特征模型的智能控制新方法。針對具有多變量、強耦合、強非線性和不確定性且特性隨工況頻繁變化的復雜工業過程,文獻[61]提出了基于多模型切換的智能解耦控制方法。針對互聯系統的協同控制問題,文獻[62]設計了適用于無時滯系統的分布式控制器。
工業互聯網由于包含眾多的子系統,其感知信息與控制決策傳輸的具體實現過程與傳統工廠存在很大的差異。控制器執行的控制算法性能由工業網絡系統的通信性能和控制策略共同決定,且二者相互依賴、相互影響,單純優化二者之一不能滿足工業網絡系統的整體性設計要求,需要將控制和通信視為完全融合的系統進行整體設計[63]。例如,控制系統的采樣速率對控制系統和通信系統都會造成影響,進而決定整體的控制性能[64]。提高合理范圍內的采樣速率、降低信息傳輸時延以及丟包率可以有效地改善控制系統性能,但是會導致通信系統的能耗增加[64]。因此,最優的采樣速率需要聯合考量控制和無線通信系統。此外,工業過程運行控制涉及回路控制和回路設定控制上下2 層反饋控制,二者對應的控制周期不同,對通信與控制提出了不同的權衡設計要求[50]。因此,控制與通信協同設計對于工業互聯網的性能優化至關重要[65]。
4 種場景下控制和通信系統協同設計的研究工作如下。
1) 無線控制系統場景下,文獻[66]對控制和通信進行協同設計,通過研究由多子系統、本地傳感器以及遠端控制-調度器組成的無線控制系統中無線傳輸穩定性對于控制性能的影響,協同設計穩定性和傳輸調度機制減輕不可靠傳輸對于閉環控制的影響,并且提出了一種分解方案,采用標準線性二次調節器和無線資源分配實現最優化控制性能的目的。
2) 工業物聯網場景下,文獻[67]通過主動方式提高工業互聯網系統的估計性能,首先提出一種霧-云分層網絡架構和分簇模型,然后設計分層的傳輸-估計方法,最后采用基于分解方法的塊坐標下降法最小化估計誤差和能量消耗的加權和,從而實現節能和穩定的傳輸-估計協同設計。
3) 自動駕駛場景下,文獻[68]針對無線連接自動駕駛車輛排的通信與控制集成系統問題,提出了一種新穎的用于優化自動駕駛車輛排操作的框架,綜合考慮無線V2V 網絡的時延和車輛控制系統的穩定性,通過分析控制系統穩定性得出無線系統可靠性的下限和近似表達式,并采用最大化無線系統可靠性的方法優化控制系統的參數。
4) 信息物理系統場景下,文獻[69]在進行短包無線通信的實時信息物理系統場景下考慮了控制和通信系統間的緊密交互,研究了封包化預測控制與無線資源消耗之間的關系,提出一種控制和通信協同設計方法以優化封包化預測控制的預測長度,實現了消耗最少無線資源產生非最少無線流量的效果。
綜上所述,目前工業互聯網下的控制與通信的協同已經引起了學術界的廣泛關注,但在國際上仍處于探索階段,是一個具有深入研究價值的領域。
3.4 現有研究面臨的問題
在現有工業互聯網引入感知通信計算協同技術的初衷,是通過打破3 個環節的邊界為工業互聯網業務提供端到端的服務保障。尤其是,需要為時延敏感工業控制類業務提供端到端的確定性、可靠服務保障。然而,現有研究在協同場景以及協同模式上,仍然有以下不足之處。
首先,在協同場景方面,現有的研究普遍側重單一傳輸場景的協同。例如,研究在無線局域網(Wi-Fi)或者5G uRLLC 網絡下通信與控制的協同。然而,在復雜傳輸環境下,信息的獲取與傳輸往往會在有線傳輸與無線傳輸中跨網交互和傳輸。
在有線傳輸場景下,通常采用時延敏感網絡(TSN,time sensitive network)來提供確定性時延和可靠性保障。在無線傳輸場景下,通常采用5G uRLLC 技術來提供低時延、高可靠保障。因此,還需要研究如何在跨TSN以及5G uRLLC混合傳輸場景下為工業互聯網時延敏感類業務提供實時可靠的傳輸保障。
目前,3GPP R16 率先提出了5G 橋接TSN 的架構,通過在TSN 中引入新的TSN 應用實體(TSN-AF)和設備側TSN 轉換器(DS-TT),在5G網絡UPF 中引入網絡側TSN 轉換器(NW-TT),在工業互聯網中構建了跨有線鏈路和無線鏈路的混合傳輸鏈路。然而,考慮到5G uRLLC 網絡與TSN在通信機理、協議機制、承載資源各個方面均有較大差異,5G-TSN 混合傳輸場景下感知通信控制協同仍然是一個研究難點[70]。
其次,在協同模式方面,現有的研究普遍采用松耦合的模式,即將感知通信計算視為一個貫序單向傳遞過程。感知-通信協同的基礎是“先感知再傳輸”,如圖3(a)所示;通信-計算協同的基礎也仍然是“先傳輸再計算”,如圖3(b)所示。這樣以通信環節作為橋接“感知與計算”的中間環節將導致通信傳輸鏈路的性能成為整體協同性能提升的瓶頸。迫切需要開展“邊感知邊傳輸”以及“邊傳輸邊計算”的感知通信計算一體化的緊耦合模式。
近幾年,空中計算技術被提出并應用到大規模傳感器數據感知領域[71]。空中計算利用無線信號在傳輸過程中的波形疊加屬性,在進行信息傳輸的同時完成了數據匯聚,這為感知通信計算一體化設計提供了一種解決思路。例如,從深度學習模型中神經元的運算過程中,神經元并非對原始的輸入數據感興趣,而是對原始輸入數據的統計值通過激活函數后的結果感興趣。此外,在聯邦智能推理過程中,邊緣智能服務器設備并非對某一個邊緣智能節點的原始的模型參數感興趣,而是對多個邊緣智能節點本地模型參數的統計值(如加權算術平均等)感興趣。因此,利用空中計算技術,可以在通信傳輸的同時,實現邊緣計算節點上神經元的運算以及深度模型參數的融合。
4 未來研究展望
結合第3 節所介紹的國內外研究現狀以及現有研究面臨的問題可以看出,如何打破現有工業互聯網中對傳感系統、通信系統和控制系統采用孤立設計的桎梏,已經成為未來工業互聯網進一步發展亟待解決的問題。本節結合前文所述工業互聯網感知通信控制融合技術發展趨勢及最新研究進展,進一步提出了工業互聯網感知通信控制融合系統的一些開放性問題,具體總結如下。
4.1 系統約束下的感知通信控制解耦機制
為了對工業互聯網中感知、通信和控制進行解耦,需要解決2 個方面的問題。第一,對感知、通信和控制耦合因素進行系統構建。構成工業互聯網系統的實體設備數量多、能力差異大。如何屏蔽工業互聯網設備實體的差異性,選取有效的狀態變量,是全面刻畫并構建工業互聯網系統的基礎。第二,基于構建的模型獲取感知、通信和控制需要遵循的基本準則。感知流和控制流通過傳輸流耦合在一起。信息在通信傳輸層傳輸時容易受無線信道波動和復雜通信協議解析的影響,導致信息傳遞的不可靠性,并進一步引發感知的不準確性和控制的不確定性。因此需要研究信息流中感知、通信和控制各部分的解耦機理,獲取感知、通信和控制的基本約束準則。
4.2 5G 與TSN 的跨域協同傳輸理論
5G 與TSN 資源形態、協議機制不同。TSN 在設備間嚴格時間同步的基礎上,基于不同優先級隊列的門控列表及流預留協議對數據發送時間、時長等進行控制,實現時延敏感類高優先級業務的確定性傳輸;然而,無線網絡內在的鏈路共享特性,導致用戶以及用戶的業務采用調度的方式動態共享無線空口資源,無法執行嚴格的QoS 保障。由此可見,TSN 是采用預留的方式分配隊列發送機會資源的,而5G uRLLC 是采用共享的方式調度無線時頻資源的。因此,5G uRLLC 與TSN 的融合需要從2個方面進行探索研究。一方面,在有線TSN 與無線5G uRLLC 網絡融合的邊界,強化5G 與TSN 的雙向柔性適配,將時延敏感網絡門控傳輸與隊列管控思想引入5G 網絡調度,實現5G 與TSN 跨域聯合實時調度;另一方面,在5G uRLLC 網絡內部,無線鏈路所固有的隨機特性給確定性保障帶來了挑戰。針對如何克服無線信道時變帶來的5G 鏈路非確定影響因素這一難題,需要從5G 資源預留、保障與動態共享機制,支持確定性時延的uRLLC 幀結構,基于微時隙的可變粒度資源調度顆粒等關鍵技術方面,強化5G 網絡針對時延敏感類業務的保障能力,實現面向工業控制業務的無線時延敏感網絡技術體系。
4.3 基于空中計算的通信計算一體化技術
工業互聯網數據的爆炸式增長以及工業終端設備存儲容量和計算能力的快速提升,使工業終端更傾向于在本地處理數據,從而促進了以聯邦學習為代表的一系列分布式機器學習技術的繁榮。然而聯邦學習的高維模型參數聚合問題給無線分布式邊緣智能系統帶來了巨大的挑戰。空中計算通過利用無線信號在傳輸過程中的波形疊加屬性以及多用戶的并發傳輸,可以實現數據在空中的高速聚合。然而傳統的空中計算方案主要針對窄帶非頻選信道,而由于聯邦學習模型參數的高維度特性,需要利用寬帶信道對其進行傳輸,由此導致傳統的面向窄帶非頻選信道的空中計算方案精確度下降,難以適用。因此,需要針對聯邦學習的模型參數聚合特點,設計新型空中計算方案,以滿足聯邦學習的通信計算一體化傳輸需求。
4.4 基于非完美信息的系統穩定控制機制
工業互聯網中的“非完美信息”,如不確定的通信時延以及不完全可測的系統狀態信息,是導致穩定控制的不確定性的直接原因。信息時延的波動主要是由通信過程中的傳輸負載、通信資源等的隨機變化導致。如果能夠完美知曉通信時延,就可以在控制算法中實現精確補償,從而實現系統的穩定。然而,在實際工業互聯網環境下,受硬件能力和無線環境快速變化的影響,通信時延常伴有不確定性。非確定性時延的存在會使系統控制滯后或錯亂,大大降低了控制系統的控制性能,嚴重時會影響控制系統的穩定性。同時,由于工業環境的限制,在設計控制算法時,由于部分系統狀態信息不可測取或不易測取,導致系統狀態信息不完全,給控制系統的穩定精確設計帶來了巨大的挑戰。因此,開展基于非完美信息的系統穩定控制機制研究,通過通信和控制的協同融合,使工業互聯網具有較強的環境適應能力和健壯性是未來研究的重要方向。
5 結束語
立足于未來工業互聯網的感知-通信-控制三大環節是從“獨立自治”向“協同融合”發展的必然趨勢,本文首先以信息的流轉為引線介紹了工業互聯網中感知-通信-控制三要素間的復雜耦合關系,隨后綜述分析了國內外相關研究現狀并總結了現有研究面臨的問題。最后對工業互聯網感知通信控制協同融合技術的發展進行了總結和展望,為該領域的未來研究打下了基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
