有人/無人機(jī)協(xié)同作戰(zhàn)模式及關(guān)鍵技術(shù)研究
2021-11-12 11:11:15孫盛智孟春寧侯妍蔡曉斌
航空兵器 2021年5期
關(guān)鍵詞:無人機(jī)
孫盛智 孟春寧 侯妍 蔡曉斌
摘 要: 隨著軍事技術(shù)不斷進(jìn)步, 無人機(jī)在軍事作戰(zhàn)方面得到越來越廣泛的應(yīng)用, 發(fā)揮著越來越重要的作用, 有人/無人機(jī)協(xié)同作戰(zhàn)模式必將成為未來一種重要的作戰(zhàn)方式。 針對無人機(jī)在協(xié)同作戰(zhàn)體系中的應(yīng)用, 構(gòu)建有人/無人機(jī)協(xié)同作戰(zhàn)體系結(jié)構(gòu), 研究有人/無人機(jī)被動(dòng)集中式、 半主動(dòng)分布式和駐地分布式協(xié)同作戰(zhàn)模式, 提出支撐未來有人/無人機(jī)協(xié)同作戰(zhàn)的關(guān)鍵技術(shù), 對提升協(xié)同作戰(zhàn)能力具有重要的現(xiàn)實(shí)意義和理論意義。
關(guān)鍵詞: 無人機(jī); 協(xié)同作戰(zhàn); 作戰(zhàn)模式; 關(guān)鍵技術(shù); 作戰(zhàn)能力
中圖分類號: ?TJ85; V279 文獻(xiàn)標(biāo)識(shí)碼:??? A 文章編號: 1673-5048(2021)05-0033-05
0 引? 言
近些年, 隨著無人機(jī)在近幾次局部戰(zhàn)爭中的廣泛應(yīng)用, 各軍事強(qiáng)國正試圖利用有人/無人機(jī)協(xié)同作戰(zhàn)來彌補(bǔ)傳統(tǒng)作戰(zhàn)力量在信息化作戰(zhàn)上的劣勢。 信息化戰(zhàn)場環(huán)境下, 利用有人/無人機(jī)協(xié)同作戰(zhàn), 充分發(fā)揮其作戰(zhàn)能力并進(jìn)行互補(bǔ)增效, 是提高作戰(zhàn)效能的重要手段[1-2]。 雖然當(dāng)前無人機(jī)的智能化水平尚無法支撐其在作戰(zhàn)行動(dòng)中完全實(shí)現(xiàn)“自主”作戰(zhàn), 但是通過有人/無人機(jī)協(xié)同作戰(zhàn), 可以充分發(fā)揮兩者的優(yōu)勢, 提高無人機(jī)智能化水平和整體作戰(zhàn)效能, 彌補(bǔ)現(xiàn)有作戰(zhàn)模式的缺點(diǎn), 是未來信息化戰(zhàn)爭重要的作戰(zhàn)方式[3]。
1 有人/無人機(jī)作戰(zhàn)體系結(jié)構(gòu)
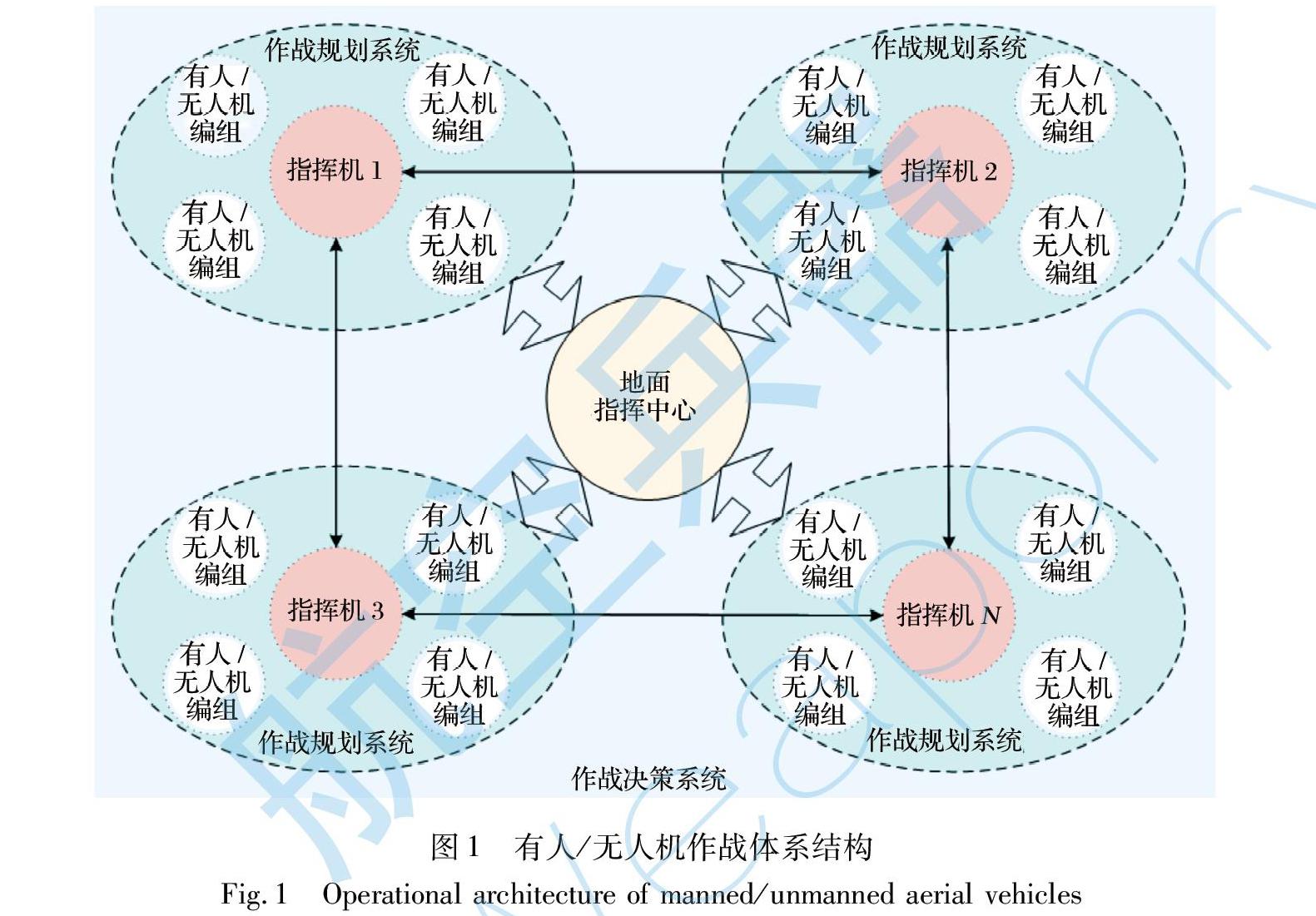
有人/無人機(jī)作戰(zhàn)體系包括地面指揮中心、 指揮機(jī)、 有人/無人機(jī)編組三類實(shí)體構(gòu)成, 利用高度信息化的作戰(zhàn)體系實(shí)現(xiàn)指揮機(jī)、 有人機(jī)和無人機(jī)之間的有序高效協(xié)同。 隨著智能化技術(shù)的發(fā)展, 指揮機(jī)并非必須固定在有人機(jī)上, 未來高度智能化的無人機(jī)同樣可以成為指揮機(jī)。 有人機(jī)與無人機(jī)協(xié)同遂行作戰(zhàn)任務(wù)過程中, 如果某個(gè)有人機(jī)或無人機(jī)被擊毀, 失去相應(yīng)的作戰(zhàn)能力, 則通過信息交互技術(shù)實(shí)現(xiàn)作戰(zhàn)體系的自動(dòng)調(diào)整, 將該平臺(tái)的作戰(zhàn)職責(zé)自動(dòng)遷移至其他作戰(zhàn)平臺(tái)上, 從而實(shí)現(xiàn)作戰(zhàn)體系的柔性重組, 提高其抗毀能力。 結(jié)合有人機(jī)與無人機(jī)協(xié)同作戰(zhàn)的組織關(guān)系, 構(gòu)建具有層次化特征的作戰(zhàn)體系結(jié)構(gòu), 如圖1所示。
有人/無人機(jī)協(xié)同作戰(zhàn)的關(guān)鍵是合理分解作戰(zhàn)任務(wù), 優(yōu)化配置作戰(zhàn)資源, 快速、 高效達(dá)成作戰(zhàn)目標(biāo)。 信息化作戰(zhàn)體系的運(yùn)行貫穿于作戰(zhàn)行動(dòng)全過程, 根據(jù)作戰(zhàn)進(jìn)程可以將體系運(yùn)行過程分為四個(gè)步驟: 一是由地面指揮中心依據(jù)作戰(zhàn)需求, 快速生成作戰(zhàn)任務(wù), 并借助作戰(zhàn)決策系統(tǒng)實(shí)現(xiàn)作戰(zhàn)任務(wù)的分解, 將作戰(zhàn)任務(wù)下發(fā)至各指揮機(jī); 二是指揮機(jī)利用作戰(zhàn)規(guī)劃系統(tǒng)對分配的作戰(zhàn)任務(wù)進(jìn)行深度分解, 形成可執(zhí)行的
作戰(zhàn)子任務(wù), 并下發(fā)至各有人/無人機(jī)編組; 三是各有人/無人機(jī)編組領(lǐng)取任務(wù)后, 對編組執(zhí)行的局部任務(wù)進(jìn)行優(yōu)化, 并建立局部協(xié)同作戰(zhàn)方案, 遂行作戰(zhàn)子任務(wù); 四是各有人/無人機(jī)編組將作戰(zhàn)任務(wù)的執(zhí)行狀態(tài)反饋至指揮機(jī)和地面指揮中心, 由指揮
機(jī)統(tǒng)籌作戰(zhàn)任務(wù)的局部執(zhí)行情況, 形成局部作戰(zhàn)態(tài)勢, 地面指揮中心統(tǒng)籌作戰(zhàn)任務(wù)的整體執(zhí)行情況, 形成整體作戰(zhàn)態(tài)勢, 并根據(jù)所形成的局部和整體作戰(zhàn)態(tài)勢, 優(yōu)化局部和整體作戰(zhàn)方案, 將優(yōu)化方案以作戰(zhàn)任務(wù)的方式反饋至各有人/無人機(jī)編組, 從而實(shí)現(xiàn)有人機(jī)和無人機(jī)閉環(huán)式協(xié)同作戰(zhàn)。
2 有人/無人機(jī)協(xié)同作戰(zhàn)模式
美軍在“第三次抵消戰(zhàn)略”中提出有人/無人機(jī)作戰(zhàn)編隊(duì), 旨在利用有人和無人機(jī)系統(tǒng)之間的有效協(xié)同, 大力激發(fā)體系作戰(zhàn)能力[4-5]。 根據(jù)無人機(jī)的智能化水平, 有人/無人機(jī)協(xié)同作戰(zhàn)可以劃分為三種模式: 一是有人/無人機(jī)被動(dòng)集中式協(xié)同作戰(zhàn)模式, 即無人機(jī)無智能化, 有人機(jī)通過遙控?zé)o人機(jī)被動(dòng)參與作戰(zhàn); 二是有人/無人機(jī)半主動(dòng)分布式協(xié)同作戰(zhàn)模式,? 即無人機(jī)具有局部智能化, 與有人機(jī)進(jìn)行半自主協(xié)同作戰(zhàn); 三是有人/無人機(jī)駐地分布式協(xié)同作戰(zhàn)模式, 即無人機(jī)具有全局智能化, 與有人機(jī)實(shí)現(xiàn)全自主協(xié)同作戰(zhàn)。
2.1 有人/無人機(jī)被動(dòng)集中式協(xié)同作戰(zhàn)模式
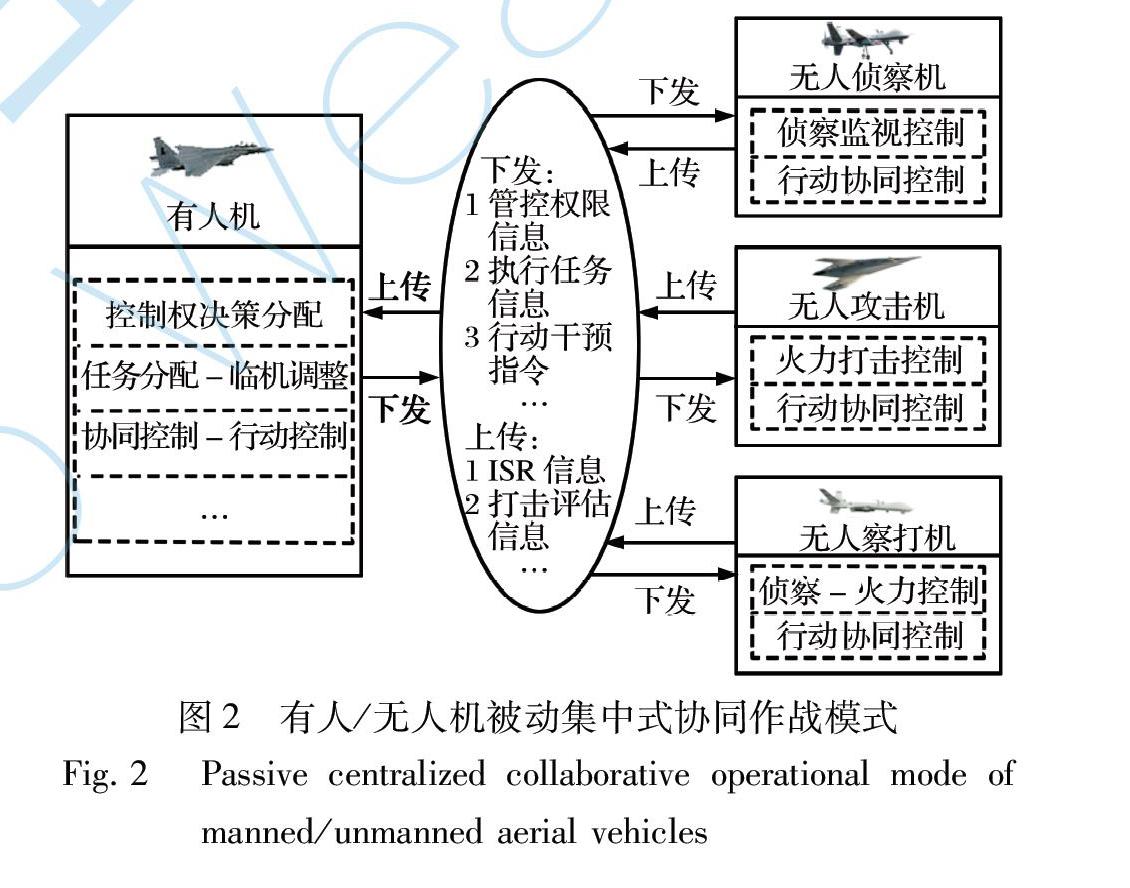
“被動(dòng)集中式”是機(jī)械化條件下的有人/無人機(jī)協(xié)同作戰(zhàn)模式, 處于協(xié)同作戰(zhàn)的初級階段, 是最原始的作戰(zhàn)模式。 “被動(dòng)集中式”作戰(zhàn)模式的指揮機(jī)全程固定在有人機(jī)上, 無人機(jī)配合有人機(jī)完成作戰(zhàn)任務(wù), 其核心思想是不單獨(dú)依靠多用途有人機(jī)獨(dú)立完成相應(yīng)的作戰(zhàn)任務(wù), 而是將各種作戰(zhàn)能力分散加載到多種無人機(jī)上, 由有人機(jī)控制無人機(jī)協(xié)同作戰(zhàn)。 因此, 如果有人機(jī)被擊毀, 將極大影響作戰(zhàn)進(jìn)程, 而無人機(jī)被擊毀, 將一定程度上影響作戰(zhàn)進(jìn)程。 有人/無人機(jī)被動(dòng)集中式協(xié)同作戰(zhàn)模式將包括少量有人機(jī)和大量無人機(jī), 有人機(jī)駕駛員作為戰(zhàn)斗指揮者和決策者, 負(fù)責(zé)作戰(zhàn)任務(wù)的分配和實(shí)施, 而無人機(jī)則用于執(zhí)行相對危險(xiǎn)或相對簡單的單項(xiàng)任務(wù)(如電子干擾或空中偵察等)[6-7]。 有人機(jī)是被動(dòng)集中式協(xié)同作戰(zhàn)的核心, 具有很強(qiáng)的指揮控制能力, 與無人機(jī)之間是一種主從關(guān)系, 有人機(jī)對無人機(jī)的飛行軌跡、 通信保障、 有效載荷和任務(wù)執(zhí)行等多個(gè)層面進(jìn)行有效的控制。 有人/無人機(jī)協(xié)同作戰(zhàn)需要其之間具有良好的互連、 互通和互操作能力, 它們之間的信息交互可以按作戰(zhàn)進(jìn)程自動(dòng)發(fā)起, 也可以由有人機(jī)根據(jù)作戰(zhàn)需求隨時(shí)發(fā)起。 有人機(jī)根據(jù)戰(zhàn)場態(tài)勢的變化, 能夠及時(shí)傳輸作戰(zhàn)指令給無人機(jī), 必要的時(shí)候?qū)o人機(jī)飛行進(jìn)行人工干預(yù), 同時(shí), 無人機(jī)能夠?qū)@取的戰(zhàn)場情報(bào)數(shù)據(jù)、 作戰(zhàn)任務(wù)執(zhí)行狀態(tài)以及自身運(yùn)行情況及時(shí)反饋給有人機(jī)。 綜合上述信息, 有人機(jī)駕駛員對戰(zhàn)場態(tài)勢進(jìn)行分析判斷, 及時(shí)調(diào)整作戰(zhàn)計(jì)劃, 并指揮無人機(jī)協(xié)同有人機(jī)完成相應(yīng)的作戰(zhàn)任務(wù)。
有人/無人機(jī)被動(dòng)集中式協(xié)同作戰(zhàn)可以降低作戰(zhàn)體系的復(fù)雜性, 減少無人機(jī)之間的通信, 適用于小規(guī)模、 近距離的有人/無人機(jī)協(xié)同作戰(zhàn)模式。
有人/無人機(jī)被動(dòng)集中式協(xié)同作戰(zhàn)模式如圖2所示。
2.2 有人/無人機(jī)半主動(dòng)分布式協(xié)同作戰(zhàn)模式
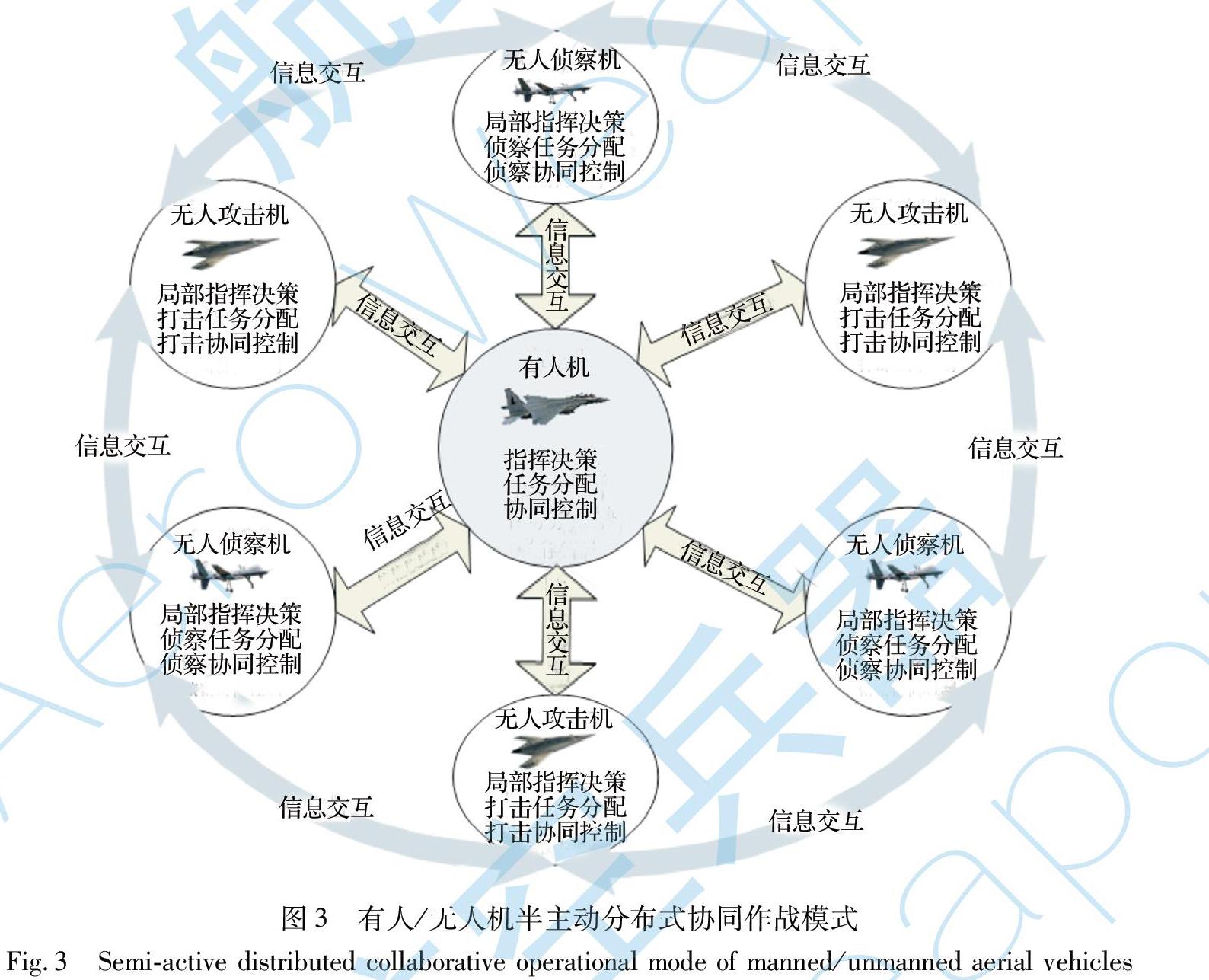
“半主動(dòng)分布式”是信息化條件下的有人/無人機(jī)協(xié)同作戰(zhàn)模式, 處于協(xié)同作戰(zhàn)的中級階段, 是目前普遍應(yīng)用的作戰(zhàn)模式。 “半主動(dòng)分布式”作戰(zhàn)模式的指揮機(jī)基本固定在有人機(jī)上, 但在局部空間也存在無人機(jī)獨(dú)立完成作戰(zhàn)任務(wù), 其核心思想是不再依靠高價(jià)值多用途有人機(jī)獨(dú)立完成相應(yīng)的作戰(zhàn)任務(wù), 而是將各種能力分散加載到多種無人機(jī)上, 相比較“被動(dòng)集中式”, 不是簡單的有人機(jī)控制無人機(jī), 而是增加了無人機(jī)之間的信息交互, 由有人/無人機(jī)協(xié)同決策。 雖然有人機(jī)對作戰(zhàn)進(jìn)程的影響要大于無人機(jī), 但是有人機(jī)被擊毀對作戰(zhàn)進(jìn)程的影響要低于“被動(dòng)集中式”。 有人/無人機(jī)半主動(dòng)分布式協(xié)同作戰(zhàn)模式不但包括大量的有人機(jī)和無人機(jī), 而且有人機(jī)的指揮決策功能部分被智能化無人機(jī)取代, 無人機(jī)可以通過捕捉局部戰(zhàn)場態(tài)勢的變化, 快速作出決策, 并分配相應(yīng)的作戰(zhàn)任務(wù)給最優(yōu)的有人/無人機(jī), 及時(shí)完成局部作戰(zhàn)任務(wù)。 在作戰(zhàn)任務(wù)執(zhí)行過程中, 無人機(jī)不再是單純的執(zhí)行機(jī), 而成為具有部分指揮決策功能的指揮機(jī)。 無人機(jī)依據(jù)局部作戰(zhàn)任務(wù)需求, 分析戰(zhàn)場態(tài)勢的變化, 判斷戰(zhàn)場目標(biāo)的威脅程度, 優(yōu)化分配傳感器和火力打擊等資源, 形成分布式傳感器資源和火力資源的使用決策, 下達(dá)科學(xué)合理的指揮協(xié)同命令, 協(xié)調(diào)分散配置的有人機(jī)與無人機(jī)高效協(xié)同完成局部作戰(zhàn)任務(wù)。 該作戰(zhàn)模式以大容量、 高效、 快速的信息傳輸網(wǎng)絡(luò)為基礎(chǔ), 以協(xié)同作戰(zhàn)任務(wù)規(guī)劃為核心, 綜合機(jī)載雷達(dá)、 無人偵察機(jī)、 無人察打機(jī)等多類傳感器設(shè)備在多維空間監(jiān)視戰(zhàn)場態(tài)勢, 為火力打擊平臺(tái)提供精確的目標(biāo)指示[8]。
4 結(jié)? 論
本文構(gòu)建了有人/無人機(jī)協(xié)同作戰(zhàn)體系結(jié)構(gòu), 研究有人/無人機(jī)被動(dòng)集中式、 半主動(dòng)分布式和駐地分布式協(xié)同作戰(zhàn)模式, 提出支撐未來有人/無人機(jī)協(xié)同作戰(zhàn)的關(guān)鍵技術(shù), 但是并沒有分析關(guān)鍵技術(shù)對協(xié)同作戰(zhàn)能力的貢獻(xiàn)率。 下一步將通過定量分析和定性分析相結(jié)合的方法, 設(shè)定貢獻(xiàn)率評估指標(biāo), 研究關(guān)鍵技術(shù)對協(xié)同作戰(zhàn)能力的影響, 為關(guān)鍵技術(shù)的研發(fā)提供科學(xué)合理的發(fā)展路線圖。
參考文獻(xiàn):
[1] 姚傳明,? 王慶元,? 楊葉林. 多平臺(tái)協(xié)同作戰(zhàn)任務(wù)系統(tǒng)建模[J].指揮信息系統(tǒng)與技術(shù),? 2017,? 8(3): 43-48.
Yao Chuanming,?? Wang Qingyuan,?? Yang Yelin. Mission System Modeling for Multi-Platform Cooperative Combat[J]. Command Information System and Technology,?? 2017,?? 8(3):? 43-48.(in Chinese)
[2] Jung D W, Tsiotras P. On-Line Path Generation for Unmanned Aerial Vehicles Using B-Spline Path Templates[J]. Journal of Guidance,?? Control,?? and Dynamics,?? 2013,?? 36(6): 1642-1653.
[3] 魏炳翌,? 聞新. 基于高階滑模觀測器的微分滑模四旋翼無人機(jī)控制研究[J]. 航空兵器,? 2017 (4):? 26-32.
Wei Bingyi,?? Wen Xin. Study on Sliding-Mode Differentiation Quadrotor UAV Based on High-Order Sliding-Mode Observer [J]. Aero Weaponry,?? 2017 (4):? 26-32.(in Chinese)
[4] 李東兵,? 申超,? 蔣琪. SoSITE等項(xiàng)目推動(dòng)美軍分布式空戰(zhàn)體系建設(shè)和發(fā)展[J]. 飛航導(dǎo)彈,?? 2016(9): 65 -70.
Li Dongbing,?? Shen Chao,?? Jiang Qi. SoSITE and Other Projects Promote the Construction and Development of the US Militarys Distributed Air Combat System[J]. Aerodynamic Missile Journal,?? 2016(9): 65-70.(in Chinese)
[5] Defense Advanced Research Projects Agency (DARPA). CD-MaST/Sea of Dreams RFI, DARPA-SY-17-47 [R]. 2016.
[6] 王濤,? 胡軍,? 黃克明. 多無人機(jī)協(xié)同作戰(zhàn)系統(tǒng)運(yùn)用方式研究[J]. 艦船電子工程,? 2015, 35(3): 4-7.
Wang Tao,?? Hu Jun,?? Huang Keming. Application Modes of Cooperative Combat for Multi-UAVS System [J]. Ship Electronic Engineering,?? 2015, 35 (3):? 4-7.(in Chinese)
[7] 沈林成, 牛軼峰, 朱華勇. 多無人機(jī)自主協(xié)同控制理論與方法[M]. 北京: 國防工業(yè)出版社,? 2013: 271-276.
Shen Lincheng, Niu Yifeng, Zhu Huayong. Theories and Methods of Autonomous Cooperative Control for Multiple UAVs[M]. Beijing:? National Defense Industry Press,?? 2013: 271- 276.(in Chinese)
[8] 李進(jìn)軍,? 申戰(zhàn)勝. 基于信息系統(tǒng)的水面艦艇分布式協(xié)同作戰(zhàn)研究[J]. 軍事運(yùn)籌與系統(tǒng)工程,? 2015,? 29(3): 16-19.
Li Jinjun,?? Shen Zhansheng. Research on the Distributed Cooperative Operation of Surface Warship Based on Information System[J]. Military Operations Research and Systems Engineering,?? 2015,?? 29(3):? 16-19.(in Chinese)
[9] 張強(qiáng),? 李建華,? 孫祿. 面向體系作戰(zhàn)的信息共享效益建模仿真[J]. 火力與指揮控制,? 2014,? 39(2): 42-45.
Zhang Qiang,?? Li Jianhua,?? Sun Lu. Research on Modeling and Simulation for Information Sharing Benefit Oriented System Combat[J]. Fire Control & Command Control,?? 2014,?? 39(2):? 42-45.(in Chinese)
[10] 張臻,? 姜楓,? 李彭偉. 基于重心分析的聯(lián)合作戰(zhàn)計(jì)劃制定方法[J]. 指揮信息系統(tǒng)與技術(shù),? 2016,? 7(3): 38-43.
Zhang Zhen,?? Jiang Feng,?? Li Pengwei. Method for Joint Operational Design Based on Gravity Analysis[J]. Command Information System and Technology,?? 2016,?? 7(3):? 38-43.(in Chinese)
[11] 王君,? 芮同林,? 李進(jìn),? 等. 空空導(dǎo)彈網(wǎng)絡(luò)化協(xié)同制導(dǎo)作戰(zhàn)模式[J]. 航空兵器,? 2015(5):? 32-35.
Wang Jun,?? Rui Tonglin,?? Li Jin,?? et al. The Networking Cooperative Guidance Combat Pattern for Air-to-Air Mi- ssile[J]. Aero Weaponry,?? 2015(5):? 32-35.(in Chinese)
Research on the Collaborative Operational Mode and Key
Technologies of Manned/Unmanned Aerial Vehicles
Sun Shengzhi1*, Meng Chunning1, Hou Yan2, Cai Xiaobin3
(1. China Coast Guard Academy, Ningbo 315801, China;
2. Aerospace Command College, Space Engineering University, Beijing 101416, China;
3.Unit 93196 of PLA, Urumqi 841700, China)
Abstract:? With the continuous progress of military technology,?? unmanned aerial vehicles have been more and more widely used in military operation and play an increasingly important role. The collaborative operational mode of manned/unmanned aerial vehicles will surely become an important operational mode in the future. According to the application of unmanned aerial vehicles in the collaborative operational system,?? the manned/unmanned aerial vehicles collaborative operational architecture is constructed,?? and the passive centralized,?? semi-active distributed and resident distributed collaborative operational modes of manned/unmanned aerial vehicles are studied,?? and key technologies for supporting future manned/unmanned aerial vehicles collaborative operation are proposed. It is of great practical and theoretical significance to enhance the capability of collaborative operation.
Key words:? unmanned aerial vehicle; collaborative operation; operational mode; key technology; operational capability
猜你喜歡
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時(shí)代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
