懸掛式山藥收獲機(jī)設(shè)計(jì)與試驗(yàn)研究
2021-11-11 12:19:58趙國(guó)棟李維華楊發(fā)展楊云鵬卞東超鄭凱瑞
關(guān)鍵詞:振動(dòng)
趙國(guó)棟,李維華,2,楊發(fā)展*,楊云鵬,卞東超,鄭凱瑞
(1.青島理工大學(xué)機(jī)械與汽車工程學(xué)院,山東 青島266520;2.山東省農(nóng)業(yè)機(jī)械科學(xué)研究院,濟(jì)南250100)
山藥在我國(guó)栽培歷史悠久,種植范圍廣、面積大。山藥作為一種藥食兼用性植物,不僅可入藥,還可作為日常菜肴,藥用和營(yíng)養(yǎng)價(jià)值均較高,是目前具有良好市場(chǎng)前景和產(chǎn)業(yè)開(kāi)發(fā)潛力的“藥食同源”作物[1-2]。但在我國(guó)主要種植區(qū),山藥收獲以人工挖掘或挖掘機(jī)側(cè)邊開(kāi)溝輔助人工收獲的方式為主,兩種收獲方式存在勞動(dòng)強(qiáng)度大、效率低、成本高且收獲完好率低等問(wèn)題,大幅降低種植山藥經(jīng)濟(jì)效益,嚴(yán)重影響農(nóng)戶種植積極性,制約山藥產(chǎn)業(yè)發(fā)展[3-4]。山藥收獲機(jī)可完成開(kāi)溝破土、振動(dòng)碎土,將地下山藥裸露,人工拔取即可完成山藥收獲,省力高效。因山藥扎根較深和莖脆性較大的特點(diǎn)[5-6],山藥收獲機(jī)作業(yè)時(shí)仍存在易破損、菜土分離不完全等問(wèn)題,此為我國(guó)山藥機(jī)械化生產(chǎn)亟待解決的問(wèn)題。
目前,我國(guó)科研機(jī)構(gòu)針對(duì)山藥收獲技術(shù)開(kāi)展系列理論和試驗(yàn)研究。日本對(duì)根莖類收獲機(jī)械研究較早,已實(shí)現(xiàn)山藥機(jī)械化聯(lián)合作業(yè)(主要針對(duì)火山灰散碎土質(zhì))[3]。濰坊森海與山東農(nóng)業(yè)大學(xué)聯(lián)合研制佐佐木牌4USY—1山藥收獲機(jī)[7],適合我國(guó)多種種植模式且田間試驗(yàn)效果良好,但該機(jī)具對(duì)土壤要求較高,對(duì)土質(zhì)適應(yīng)能力較差,未能大面積推廣使用。于萬(wàn)勝設(shè)計(jì)振動(dòng)鏈輸送帶式山藥收獲機(jī)雖未進(jìn)行田間試驗(yàn),但為研究收獲機(jī)開(kāi)溝裝置等關(guān)鍵結(jié)構(gòu)提供理論基礎(chǔ)[8]。宋帥帥等設(shè)計(jì)自走式麻山藥收獲機(jī)集開(kāi)溝收獲、土壤回填、平整土地等功能于一體,雙行收獲,并保證收獲完好率,但此機(jī)具采用履帶自走式底盤結(jié)構(gòu)及雙排麻山藥收獲,收獲機(jī)體型較大、造價(jià)成本較高且僅專機(jī)專用,無(wú)法大規(guī)模推廣和應(yīng)用[9]。楊發(fā)展設(shè)計(jì)懸掛式山藥收獲機(jī)一代通過(guò)對(duì)振動(dòng)碎土裝置優(yōu)化設(shè)計(jì),碎土效果良好,田間試驗(yàn)收獲完好率達(dá)89.2%,降低整機(jī)成本,但整機(jī)布局不夠合理,開(kāi)溝裝置與振動(dòng)碎土裝置位于一側(cè),整機(jī)不平衡,且關(guān)于參數(shù)優(yōu)化對(duì)收獲質(zhì)量影響研究不足[10]。
本文以自行研制懸掛式山藥收獲機(jī)為基礎(chǔ),對(duì)其關(guān)鍵部件作強(qiáng)度校核,針對(duì)山藥收獲完好率和收獲效率低等問(wèn)題,結(jié)合山藥收獲農(nóng)藝特點(diǎn)和土壤失效破壞準(zhǔn)則,通過(guò)振動(dòng)碎土裝置進(jìn)行運(yùn)動(dòng)分析確定試驗(yàn)參數(shù),開(kāi)展山藥收獲質(zhì)量試驗(yàn)研究,為明晰關(guān)鍵部件工作機(jī)理、優(yōu)化其結(jié)構(gòu)及試驗(yàn)參數(shù)、提高綜合質(zhì)量提供理論基礎(chǔ)和數(shù)據(jù)支撐。
1 總體結(jié)構(gòu)設(shè)計(jì)與工作分析
懸掛式山藥收獲機(jī)主要參數(shù)如表1所示,整機(jī)結(jié)構(gòu)如圖1所示,主要由懸掛裝置、開(kāi)溝破土裝置、排土回填裝置、振動(dòng)碎土裝置等組成,可同時(shí)實(shí)現(xiàn)對(duì)山藥收獲過(guò)程中破土開(kāi)溝、提升排土、土壤回填及山藥塊莖與土壤分離等功能。

圖1 懸掛式山藥收獲機(jī)整機(jī)結(jié)構(gòu)簡(jiǎn)圖Fig.1 The whole structure of the hanging yam harvester

表1 總體結(jié)構(gòu)參數(shù)和關(guān)鍵部件工作參數(shù)Table 1 Overall structural parameters and working parameters of key components
收獲機(jī)以三點(diǎn)懸掛方式安裝在拖拉機(jī)后懸掛機(jī)構(gòu)上,由拖拉機(jī)后輸出軸提供動(dòng)力輸入。工作前,在山藥壟頭處挖一深坑便于振動(dòng)碎土裝置下擺入土,收獲機(jī)通過(guò)拖拉機(jī)調(diào)整位置,保證兩開(kāi)溝鏈分別位于山藥兩側(cè)并與作業(yè)路線平行。收獲機(jī)工作時(shí),兩開(kāi)溝鏈在拖拉機(jī)后輸出軸帶動(dòng)下運(yùn)轉(zhuǎn)工作,開(kāi)出兩條具有一定寬度溝槽,由開(kāi)溝鏈挖切提升帶出的土壤通過(guò)橫向排土螺旋排出并回填至上一行程產(chǎn)生的溝槽中,山藥根莖則處于兩溝槽間的土坯中,整機(jī)在拖拉機(jī)帶動(dòng)下前進(jìn),振動(dòng)鏟將土坯切斷,通過(guò)振動(dòng)將山藥和土壤分離并部分裸露于土層表面,最后由工作人員撿拾山藥完成收獲。
2 傳動(dòng)系統(tǒng)原理分析
懸掛式山藥收獲機(jī)作業(yè)環(huán)境惡劣,其傳動(dòng)系統(tǒng)的設(shè)計(jì)應(yīng)滿足動(dòng)力分配合理、整機(jī)結(jié)構(gòu)緊湊、動(dòng)力傳遞穩(wěn)定的要求。收獲機(jī)作業(yè)過(guò)程中動(dòng)力主要用于整機(jī)升降、開(kāi)溝破土、排土回填、碎土裝置擺動(dòng)以及振動(dòng)碎土五個(gè)部分,因收獲機(jī)體積較大、傳動(dòng)線路復(fù)雜,布局受限,僅通過(guò)傳統(tǒng)機(jī)械傳動(dòng)無(wú)法全部實(shí)現(xiàn)五個(gè)部分的動(dòng)力傳遞。因此,設(shè)計(jì)中綜合利用液壓傳動(dòng)的調(diào)節(jié)便捷和布局靈活等優(yōu)點(diǎn),通過(guò)多組液壓缸和液壓馬達(dá)直接將動(dòng)力傳遞到工作部件,增強(qiáng)傳遞系統(tǒng)柔性[11-12]。深度結(jié)合機(jī)械傳動(dòng)和液壓傳動(dòng)的優(yōu)勢(shì),有效提高收獲機(jī)穩(wěn)定性,簡(jiǎn)化機(jī)具結(jié)構(gòu),便于參數(shù)調(diào)節(jié)。
該收獲機(jī)機(jī)械傳動(dòng)系統(tǒng)由拖拉機(jī)通過(guò)萬(wàn)向節(jié)傳動(dòng)將動(dòng)力傳遞給動(dòng)力輸入軸,再通過(guò)齒輪傳動(dòng)和鏈傳動(dòng)將動(dòng)力分別傳遞給螺旋排土器軸和開(kāi)溝鏈軸,實(shí)現(xiàn)開(kāi)溝破土和排土回填功能,機(jī)械傳動(dòng)系統(tǒng)具體配置如圖2所示。液壓傳動(dòng)系統(tǒng)分為兩部分,一部分由拖拉機(jī)自帶液壓泵提供動(dòng)力,通過(guò)兩組液壓缸實(shí)現(xiàn)整機(jī)升降和振動(dòng)碎土裝置擺動(dòng);另一部分以傳送鏈與動(dòng)力輸入軸連接的液壓泵提供動(dòng)力,通過(guò)兩個(gè)液壓馬達(dá)實(shí)現(xiàn)振動(dòng)碎土功能,液壓傳動(dòng)系統(tǒng)原理如圖3所示。
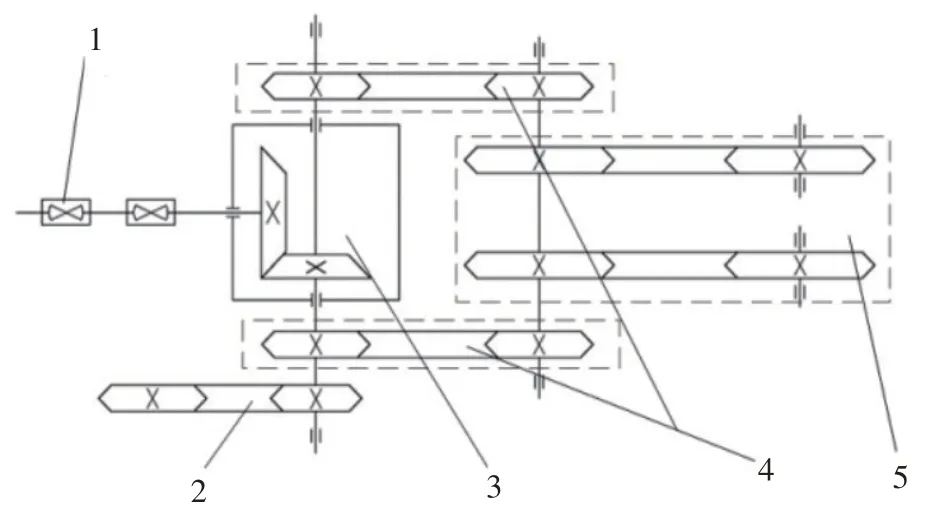
圖2 機(jī)械傳動(dòng)系統(tǒng)Fig.2 Mechanical transmission system

圖3 液壓傳動(dòng)系統(tǒng)原理Fig.3 Schematic diagram of hydraulic transmission system
3 主要工作部件設(shè)計(jì)
3.1 開(kāi)溝破土裝置
山藥收獲時(shí)可根據(jù)山藥生物學(xué)、力學(xué)特性和山藥收獲農(nóng)藝特點(diǎn)獲得最佳開(kāi)溝深度、溝槽寬度及中間土坯寬度等作業(yè)參數(shù),以保證山藥塊莖完整性并提高后續(xù)振動(dòng)碎土、菜土分離質(zhì)量,因此開(kāi)溝破土是山藥收獲過(guò)程中重要一環(huán)。開(kāi)溝破土裝置(見(jiàn)圖4)主要由主動(dòng)鏈輪、從動(dòng)惰輪、鏈條、支撐架及多種鏈刀等組成。其中鏈刀作為開(kāi)溝破土裝置中關(guān)鍵部分,可通過(guò)對(duì)鏈刀進(jìn)行組合設(shè)計(jì)以提高開(kāi)溝質(zhì)量。采用三種形式鏈刀,分別是豎直鏈刀、帶有一定角度鏈刀和圓弧杯形鏈刀,以兩個(gè)豎直鏈刀,兩個(gè)向內(nèi)傾斜的鏈刀,兩個(gè)向外傾斜的鏈刀,兩個(gè)圓弧杯形鏈刀共4對(duì)鏈刀為一組,每隔一個(gè)鏈節(jié)安裝一個(gè)鏈刀,交錯(cuò)分布,固定安裝于外鏈板上。鏈刀切土分布如圖4所示,a、b、c、d分別表示向內(nèi)傾斜鏈刀對(duì)、豎直鏈刀對(duì)、向外傾斜鏈刀對(duì)以及圓弧杯形鏈刀對(duì)的切土范圍,確保在開(kāi)溝時(shí)鏈刀不漏切,能夠?qū)⑼寥劳暾麕У脚磐裂b置中。

圖4 開(kāi)溝破土裝置及鏈刀切土分布Fig.4 Ditching and soil breaking device and chain cutter cutting soil distribution
開(kāi)溝破土作業(yè)中鏈刀會(huì)受到土壤阻力及沖擊,極易遭受損壞,為保證開(kāi)溝破土裝置能夠長(zhǎng)時(shí)間高質(zhì)量作業(yè),對(duì)多種鏈刀作阻力計(jì)算并通過(guò)SolidWorks 2018作三維建模及結(jié)構(gòu)靜力學(xué)分析,校核鏈刀強(qiáng)度。
3.1.1 鏈刀切削阻力計(jì)算
鏈刀切削土壤阻力Ft的計(jì)算公式[13]為:
式中,Cs為土壤堅(jiān)實(shí)度計(jì)的沖擊次數(shù),一般取Cs=15;δ為切削厚度,切削厚度與鏈刀的節(jié)距以及開(kāi)溝破土裝置與地面間夾角大小相關(guān),取δ=8 mm;δc為刀片寬度,其中帶角度的刀片取28 mm,豎直刀片取6 mm,圓弧杯形刀片取40 mm;φ為刀片切削角,圓弧杯形刀片的切削角與其后角相等,取12°,其余兩種刀片取5°;eH為刀片尖角計(jì)算系數(shù),取eH=0.81。經(jīng)計(jì)算,豎直刀片的切削阻力Ft1=49.29 N,帶有一定角度刀片切削阻力Ft2=59.52 N,圓弧杯形刀片的切削阻力Ft3=69.89 N。
3.1.2 鏈刀結(jié)構(gòu)靜力學(xué)分析
利用軟件Solidworks對(duì)三種不同形式鏈刀進(jìn)行三維建模,對(duì)鏈刀受力處進(jìn)行分割線劃分,通過(guò)Solidworks Simulation插件對(duì)三種鏈刀分別創(chuàng)建靜力學(xué)分析計(jì)算,定義鏈刀材料屬性為65 Mn[14],密度ρ=7 870 kg·m-3,泊松比μ=0.3,楊氏彈性模量E=200 GPa,屈服強(qiáng)度[δs]=430 MPa,其許用應(yīng)力[δ]=215 MPa。對(duì)鏈刀兩孔位置施加固定約束,將鏈刀受到的刀體兩側(cè)摩擦力及裝填土壤重力通過(guò)切削阻力作等效處理,對(duì)鏈刀受到的合力施加動(dòng)載系數(shù)(k=1.5)[15],按最危險(xiǎn)情況將力均加載到鏈刀載荷加載面上,施加重力,采用默認(rèn)方法對(duì)三種鏈刀作網(wǎng)格劃分,三種鏈刀有限元預(yù)處理模型如圖5所示。
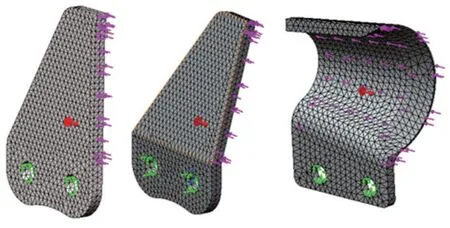
圖5 鏈刀有限元預(yù)處理模型Fig.5 Chain knife finite element preprocessing model
由圖6鏈刀應(yīng)力云圖可知,豎直刀片和傾斜刀片應(yīng)力集中部位位于兩孔位置處,且最大應(yīng)力值為4.862和8.11 MPa,而杯形圓弧刀片的應(yīng)力集中部位在刀片外側(cè)小弧口與直板折彎處,最大應(yīng)力為15.56 MPa,遠(yuǎn)小于65 Mn許用應(yīng)力;由圖7鏈刀變形云圖可知,豎直刀片和傾斜刀片的最大變形位于前刀尖處,分別為0.002207和0.00312 mm,圓弧杯形刀片最大變形處位于后刀尖位置,為0.02313 mm。綜上所述,三種鏈刀強(qiáng)度和剛度均滿足設(shè)計(jì)要求。
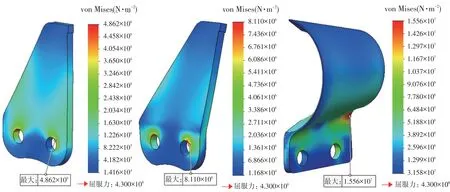
圖6 鏈刀應(yīng)力云圖Fig.6 Stress cloud diagram of chain cutter
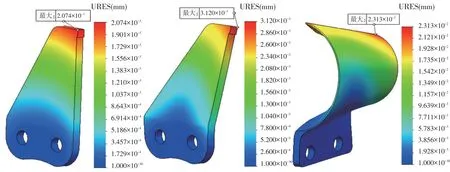
圖7 鏈刀變形云圖Fig.7 Deformation cloud map of chain knife
3.2 排土回填裝置
由鏈?zhǔn)介_(kāi)溝裝置開(kāi)溝破土帶至地表的土壤必須及時(shí)清除,因土壤落入溝槽造成堵塞,阻礙機(jī)具行走。目前,螺旋輸送機(jī)構(gòu)被認(rèn)為是輸送效率較高且操作簡(jiǎn)便的裝置。因此,設(shè)計(jì)橫向螺旋排土裝置并將其安裝在由鏈刀帶出的土壤下方,使土壤能落在螺旋輸送槽內(nèi),將土壤運(yùn)離溝槽附近。橫向螺旋排土裝置結(jié)構(gòu)如圖8所示,規(guī)格型號(hào)選用200系列,其螺旋直徑R為200 mm、螺距Pd為200 mm。設(shè)計(jì)時(shí),橫向螺旋排土裝置向右側(cè)伸出,將土壤向一側(cè)輸送至上一行程產(chǎn)生的溝槽中,實(shí)現(xiàn)土壤回填。

圖8 橫向排土螺旋裝置結(jié)構(gòu)簡(jiǎn)圖Fig.8 Schematic diagram of the structure of the horizontal discharge screw device
為保證開(kāi)溝裝置挖掘土壤及時(shí)運(yùn)走,對(duì)排土機(jī)構(gòu)排土能力作校核:
開(kāi)溝裝置理論土壤掘出率為:

式中,H為開(kāi)溝深度,取最大值H=1.3 m;lAB為開(kāi)溝寬度,lAB=0.13 m;vc為機(jī)具行進(jìn)速度,取作業(yè)速度最大值vc=180 m·h-1。
在實(shí)際中,開(kāi)溝得到的土壤呈松散狀,因此開(kāi)溝裝置實(shí)際土壤掘出率為:

式中,KP為土壤散開(kāi)系數(shù)[16],取KP=1.5;λ為與鏈條運(yùn)動(dòng)速度有關(guān)的散開(kāi)系數(shù),鑒于排土螺旋外緣速度在1.5~2 m·s-1之間,取λ=0.75。
左右螺旋輸送機(jī)構(gòu)的土壤輸送率為:

式中,R為螺旋葉片外徑,R=200 mm;r為螺旋葉片內(nèi)徑,r=80 mm;Pd為螺距,Pd=200 mm;n為排土機(jī)構(gòu)轉(zhuǎn)速,n=180 r·min-1。
可看出,開(kāi)溝裝置土壤掘出率小于排土機(jī)構(gòu)土壤輸送率,排土機(jī)構(gòu)及時(shí)運(yùn)走開(kāi)溝裝置挖掘的土壤,滿足排土要求。
3.3 振動(dòng)碎土裝置
在山藥收獲機(jī)作業(yè)過(guò)程中,振動(dòng)碎土裝置將包含有山藥塊莖的土坯振動(dòng)破碎,使山藥與土壤分離并裸露。因此,裝置設(shè)計(jì)的合理性直接影響后續(xù)挖掘收獲效率、動(dòng)力消耗和收獲質(zhì)量等,所以要對(duì)該部件進(jìn)行功能和結(jié)構(gòu)的精準(zhǔn)設(shè)計(jì)[10]。振動(dòng)碎土裝置(見(jiàn)圖1)主要結(jié)構(gòu)包括機(jī)架、液壓馬達(dá)a、液壓馬達(dá)b、曲柄軸、格柵式振動(dòng)鏟、支撐梁、偏心輪、撥土連桿、撥土格柵和振動(dòng)連桿等。
振動(dòng)碎土裝置以兩套曲柄搖桿機(jī)構(gòu)為基礎(chǔ)完成設(shè)計(jì),其中一套是由液壓馬達(dá)b帶動(dòng)的曲柄軸為主動(dòng)構(gòu)件,通過(guò)曲柄軸旋轉(zhuǎn)帶動(dòng)振動(dòng)連桿運(yùn)動(dòng),帶動(dòng)作為搖桿的格柵式振動(dòng)鏟上下擺動(dòng),實(shí)現(xiàn)對(duì)中間土坯的切斷和振動(dòng)碎土功能。一套由液壓馬達(dá)a帶動(dòng)偏心輪轉(zhuǎn)動(dòng),以偏心輪為主動(dòng)構(gòu)件帶動(dòng)撥土連桿運(yùn)動(dòng),帶動(dòng)作為搖桿的撥土格柵左右擺動(dòng),能夠去除表層土壤,實(shí)現(xiàn)山藥塊莖與土壤分離。其中,可通過(guò)調(diào)節(jié)振動(dòng)連桿長(zhǎng)度改變格柵式振動(dòng)鏟與水平地面間夾角,改變振動(dòng)鏟傾角;調(diào)節(jié)液壓馬達(dá)轉(zhuǎn)速可改變格柵式振動(dòng)鏟頻率和撥土格柵擺動(dòng)頻率,為后續(xù)性能試驗(yàn)提供條件。
根據(jù)常被用來(lái)計(jì)算土壤破壞的莫爾-庫(kù)倫強(qiáng)度理論可知[17],土壤中某一處的應(yīng)力狀態(tài)達(dá)到極限平衡條件時(shí)會(huì)進(jìn)入屈服狀態(tài)瀕于破壞。因此,振動(dòng)碎土裝置振動(dòng)包含山藥塊莖的中間土坯,中間土坯受到振動(dòng)及自身重力帶來(lái)的沖擊載荷,引起形變,發(fā)生相對(duì)移動(dòng)使土壤間產(chǎn)生剪切力,當(dāng)剪切力達(dá)到土壤失效力時(shí),土壤破碎,山藥塊莖與土壤分離。
振動(dòng)碎土裝置工作時(shí),格柵式振動(dòng)鏟產(chǎn)生的速度和加速度不斷變化,中間土坯受力也不斷變化,因中間土坯破碎位置不確定性,導(dǎo)致其運(yùn)動(dòng)軌跡不規(guī)則,加重土壤破碎程度。因此,可通過(guò)格柵式振動(dòng)鏟的運(yùn)動(dòng)分析,確定影響土壤受力的工作參數(shù),控制山藥塊莖和土壤分離效果。
對(duì)格柵式振動(dòng)鏟的運(yùn)動(dòng)分析可通過(guò)解析法[18-19]完成。構(gòu)建機(jī)構(gòu)位置方程,對(duì)時(shí)間求導(dǎo),即可求得機(jī)構(gòu)速度和加速度方程。為便于表示格柵式振動(dòng)鏟位移、速度和加速度大小及方向,以曲柄軸軸心點(diǎn)A為原點(diǎn),支撐梁軸心點(diǎn)D與A點(diǎn)連線及其垂線分別為x軸與y軸建立坐標(biāo)系,如圖9所示。控制格柵式振動(dòng)鏟振動(dòng)的機(jī)構(gòu)本質(zhì)是簡(jiǎn)單的四桿機(jī)構(gòu),已知各桿件長(zhǎng)度和曲柄軸角速度(ω1),將構(gòu)件用矢量表示,在坐標(biāo)系中作出機(jī)構(gòu)的封閉矢量多邊形ABCDA和機(jī)構(gòu)在拖拉機(jī)帶動(dòng)下的行進(jìn)速度(v)方向,其中E表示格柵式振動(dòng)鏟的鏟尖。機(jī)構(gòu)各矢量和為零,即機(jī)構(gòu)的封閉矢量方程為:


圖9 封閉矢量多邊形Fig.9 Closed vector polygon
將機(jī)構(gòu)的封閉矢量方程(5)改寫為復(fù)數(shù)矢量形式,為:
利用歐拉公式將矢量方程的實(shí)部和虛部分離再聯(lián)立求解,可以求得:
式 中,A=2l1l3sinθ1;B=2l3(l1cosθ1-l4);C=l22-l12-l32-l42+2l1l4cosθ1。
當(dāng)作為原動(dòng)件的曲柄軸旋轉(zhuǎn)一圈,機(jī)構(gòu)在拖拉機(jī)帶動(dòng)下行進(jìn)距離S(mm)為:

式中,v為機(jī)具行進(jìn)速度(m·h-1);ω1為曲柄軸轉(zhuǎn)速(rad·s-1)。
則格柵式振動(dòng)鏟鏟尖E在曲柄軸旋轉(zhuǎn)一周的位移為:
式中,DE為機(jī)構(gòu)中點(diǎn)D、E間距離(mm);θ0為曲柄軸初始狀態(tài)夾角(°)。
將封閉矢量方程的復(fù)數(shù)矢量形式(6)對(duì)時(shí)間t進(jìn)行求導(dǎo),可得:

將其進(jìn)行實(shí)部和虛部分離獲得兩分式后再聯(lián)立求解,可得到構(gòu)件2、3的角速度為:

格柵式振動(dòng)鏟繞點(diǎn)D擺動(dòng),則鏟尖E的速度(mm·s-1)為:

因格柵式振動(dòng)鏟作擺動(dòng),當(dāng)ω3為順時(shí)針時(shí),式中90°前為“+”,反之取“-”。
將式(12)對(duì)時(shí)間t進(jìn)行求導(dǎo),進(jìn)行實(shí)部和虛部分離獲得兩分式后再聯(lián)立求解,可得構(gòu)件3的角加速度為:

則格柵式振動(dòng)鏟鏟尖的加速度(mm·s-2)為:

其中:
當(dāng)α3為順時(shí)針時(shí),式中90°前為“+”,反之取“-”。
通過(guò)分析格柵式振動(dòng)鏟尤其是振動(dòng)鏟尖位移、速度和加速度,機(jī)構(gòu)的四個(gè)桿件(l1、l2、l3、l4)、曲柄軸轉(zhuǎn)速(ω1)及機(jī)具行進(jìn)速度(v)直接影響格柵式振動(dòng)鏟軌跡并間接影響其速度與加速度。因此,可通過(guò)改變拖拉機(jī)行進(jìn)速度改變機(jī)具行進(jìn)速度v,調(diào)節(jié)振動(dòng)連桿長(zhǎng)度即格柵式振動(dòng)鏟傾角改變?chǔ)?,調(diào)節(jié)液壓馬達(dá)轉(zhuǎn)速改變曲柄軸轉(zhuǎn)速ω1大小,影響格柵式振動(dòng)鏟軌跡、速度及加速度,改變土壤受力,因此可通過(guò)試驗(yàn)確定最大土壤破碎效率且山藥收獲完好率最高的最優(yōu)參數(shù)組合。
4 田間性能試驗(yàn)測(cè)試
4.1 試驗(yàn)條件與方法
試驗(yàn)于2020年12月2~4日在青島平度市張舍鎮(zhèn)潘家洼村進(jìn)行。試驗(yàn)山藥品種為白玉山藥,單壟單行種植模式,壟距1 200 mm,株距250~400 mm,深為900~1 200 mm。試驗(yàn)地面積1 000 m2(200 m×5 m),共種植4壟山藥,土壤類型為壤土。
從試驗(yàn)地塊中隨機(jī)選取30個(gè)測(cè)試區(qū),每個(gè)測(cè)試區(qū)內(nèi)有單壟山藥,測(cè)試區(qū)長(zhǎng)10 m,30次試驗(yàn),收獲機(jī)懸掛于拖拉機(jī)上,保持拖拉機(jī)勻速行駛,開(kāi)溝深度保持恒定,實(shí)驗(yàn)員跟隨駕駛?cè)藛T在田間進(jìn)行收獲試驗(yàn),測(cè)試儀器包括米尺、電子秤、轉(zhuǎn)速傳感器、位移傳感器等。
4.2 性能試驗(yàn)
選取曲柄軸轉(zhuǎn)速X1、機(jī)具行進(jìn)速度X2、振動(dòng)鏟傾角X33項(xiàng)對(duì)山藥收獲質(zhì)量影響較大的工作參數(shù)作為試驗(yàn)因素(見(jiàn)表2)。開(kāi)溝深度(1 300 mm)、作業(yè)幅寬(550 mm)等其他試驗(yàn)參數(shù)保持不變。試驗(yàn)以山藥收獲完好率Y1、山藥收獲生產(chǎn)率Y2作為指標(biāo),進(jìn)行三因素三水平響應(yīng)面試驗(yàn)(見(jiàn)表3)[20-21]。

圖10 田間試驗(yàn)現(xiàn)場(chǎng)Fig.10 Field trial site

表2 響應(yīng)面試驗(yàn)因素水平Table 2 Response surface test factor level

表3 響應(yīng)面試驗(yàn)設(shè)計(jì)方案與結(jié)果Table 3 Response surface test design scheme and results
4.3 回歸模型建立與顯著性檢驗(yàn)
通過(guò)Design-Expert軟件[22-23]對(duì)三因素三水平中數(shù)據(jù)進(jìn)行多元回歸擬合分析,建立Y1、Y2對(duì)X1、X2、X3的響應(yīng)面回歸模型:

回歸方程方差分析如表4所示,完好率Y1和生產(chǎn)率Y2的P值分別<0.0001和0.0002,均小于0.05,且失擬項(xiàng)的P值為0.4919和0.3814,均大于0.05,表明這兩個(gè)模型影響極顯著且擬合程度較高,擬合方程決定系數(shù)R2分別為0.9835和0.9704,說(shuō)明回歸方程可解釋97%以上的評(píng)價(jià)指標(biāo)。因此,可通過(guò)這兩個(gè)回歸方程優(yōu)化收獲機(jī)工作參數(shù)。

表4 回歸方程方差分析Table 4 Analysis of variance of regression equation
4.4 交互因素對(duì)性能影響規(guī)律分析
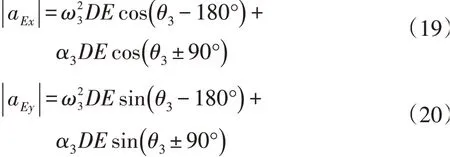
探究曲柄軸轉(zhuǎn)速、機(jī)具行進(jìn)速度及振動(dòng)鏟傾角交互作用對(duì)山藥收獲完好率及生產(chǎn)率的影響,利用Design-Expert軟件繪制響應(yīng)面。交互因素對(duì)山藥收獲完好率及生產(chǎn)率影響響應(yīng)面曲線如圖11、12所示。
圖11(a)表明減小機(jī)具行進(jìn)速度,適當(dāng)增加曲柄軸轉(zhuǎn)速可提高收獲完好率,而曲柄軸轉(zhuǎn)速過(guò)大減小收獲完好率;圖11(b)表明適當(dāng)減小振動(dòng)鏟傾角并增加曲柄軸轉(zhuǎn)速有助于提高收獲完好率,振動(dòng)鏟傾角和曲柄軸轉(zhuǎn)速過(guò)小降低收獲完好率;圖11(c)表明減小機(jī)具行進(jìn)速度,適當(dāng)減小振動(dòng)鏟傾角有助于提高收獲完好率。圖12(a)表明增加機(jī)具行進(jìn)速度有助于提高生產(chǎn)率;圖12(b)表明曲柄軸轉(zhuǎn)速和振動(dòng)鏟傾角對(duì)生產(chǎn)率影響不大;圖12(c)表明增大機(jī)具行進(jìn)速度可提高生產(chǎn)率。
圖11 交互因素對(duì)收獲完好率影響的響應(yīng)面圖Fig.11 Response surface diagram of the influence of interaction factors on the harvest intact rate

圖12 交互因素對(duì)生產(chǎn)率影響的響應(yīng)面圖Fig.12 Response surface diagram of the impact of interactive factors on productivity
4.5 試驗(yàn)優(yōu)化與驗(yàn)證
山藥在機(jī)械化收獲過(guò)程中,其完好率是最重要指標(biāo),利用Design-Expert軟件優(yōu)化求解模塊可以求得約束條件下最大收獲完好率的最優(yōu)參數(shù)組合。最優(yōu)參數(shù)組合為:曲柄軸轉(zhuǎn)速306.18 r·min-1、機(jī)具行進(jìn)速度137.85 m·h-1及振動(dòng)鏟傾角-6.18°,對(duì)應(yīng)收獲完好率為90.984%。試驗(yàn)于2020年12月18日在相同地點(diǎn)開(kāi)展驗(yàn)證試驗(yàn),山藥收獲完好率為90.855%。與第一次試驗(yàn)收獲完好率平均值對(duì)比,增加2.435%,性能明顯改善。
5 結(jié)論
a.研究設(shè)計(jì)一種懸掛式山藥收獲機(jī),可同時(shí)實(shí)現(xiàn)對(duì)山藥收獲過(guò)程中破土開(kāi)溝、排土、土壤回填及山藥與土壤分離等功能,收獲完好率及生產(chǎn)率高,有效降低人工成本,提高經(jīng)濟(jì)效益。
b.在對(duì)山藥收獲機(jī)整機(jī)工作原理分析基礎(chǔ)上,研究整機(jī)關(guān)鍵部件結(jié)構(gòu)設(shè)計(jì)和參數(shù)確定。利用Solidworks軟件對(duì)鏈刀作結(jié)構(gòu)靜力學(xué)分析,鏈刀最大應(yīng)力為15.56 MPa、最大位移為0.02313 mm,滿足強(qiáng)度及剛度要求,可確保長(zhǎng)時(shí)間高質(zhì)量開(kāi)溝作業(yè);通過(guò)土壤失效破碎理論及格柵式振動(dòng)鏟運(yùn)動(dòng)分析,確定可通過(guò)調(diào)節(jié)曲柄軸轉(zhuǎn)速、機(jī)具行進(jìn)速度及振動(dòng)鏟傾角改變土壤破碎效果,為后續(xù)提高果土分離質(zhì)量試驗(yàn)提供理論支撐。
c.借助Design-Expert軟件,選取曲柄軸轉(zhuǎn)速、機(jī)具行進(jìn)速度及振動(dòng)鏟傾角3個(gè)因素為影響因子,開(kāi)展三因素三水平試驗(yàn),分析各因素對(duì)收獲完好率及生產(chǎn)率的影響并優(yōu)化。結(jié)果表明,最大收獲完好率最優(yōu)參數(shù)組合為曲柄軸轉(zhuǎn)速306.18 r·min-1、機(jī)具行進(jìn)速度137.85 m·h-1和振動(dòng)鏟傾角-6.18°,較第一次收獲完好率增加2.435%,性能改善。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語(yǔ)·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00