三相VIENNA整流器的雙閉環控制策略研究
2021-11-09 11:36:06鄧孝祥江泓澄劉宏洋
中國新技術新產品 2021年16期
關鍵詞:控制策略
鄧孝祥 江泓澄 劉宏洋
(黑龍江科技大學電氣與控制工程學院,黑龍江 哈爾濱 150022)
0 引言
在“碳達峰、碳中和”戰略目標的要求下,新能源汽車的發展迎來了新的契機。在電動汽車充電系統中,為了提高電網的電能質量、減少諧波電流的產生,需要進行功率因數校正。VIENNA整流器具有開關管數量少、電壓應力低、高功率因數以及低諧波電流等優點,因此備受關注[1]。目前在VIENNA整流器的眾多控制方式中,雙閉環控制是最常見的控制策略。文獻[1]采用傳統的電流滯環控制策略,但由于開關頻率不固定,因此會影響網側電流質量。文獻[2]電流內環采用一種模型預測控制策略,但對采樣頻率依賴較高,不能保證采用精度,同時也存在開關頻率不固定的缺點。文獻[3]采用單周期控制,系統簡單且魯棒性高,但參數設計煩瑣,靈活度低,應用十分受限。還有研究者采用了一種諧振滑膜控制策略,雖然改善了電能質量,但是控制器設計難度大且容易引起系統諧振。基于上述問題,該文以三相類VIENNA整流器為研究對象。三相類VIENNA整流器與LCL濾波器相結合,不僅可以濾除高次諧波,還可以提高了整流器的功率密度。該文研究了類VIENNA整流器的工作原理,建立了在d-q坐標系下的數學模型。d-q坐標系下d軸分量與q軸分量存在強耦合關系,電流內環采用前饋解耦的控制策略,實現對電流分量的單獨控制。電壓外環采用PI控制,實現了對參考電壓的快速準確跟蹤,并對其進行了仿真與實驗驗證[2]。
1 VIENNA整流器的原理與建模
三相類VIENNA整流器與LCL濾波器相結合,不僅可以濾除高次諧波,而且還可以提高整流器的功率密度。三相類VIENNA整流器主電路如圖1所示。其中ea、eb和ec為三相交流電壓源,網側電感(La、Lb和Lc)、網側電容(Cf)以及PFC電感(Lf+、Lf-)構成LCL濾波器,電容Cf位于兩電感中間,為濾波對象中的高頻諧波分量提供通路。Dw+、Dw-為工頻二極管,Df+、Df-為快恢復二極管,Si(i=1,2,…,6)構成各相橋臂雙向開關管,RL為負載;M為電容中性點。
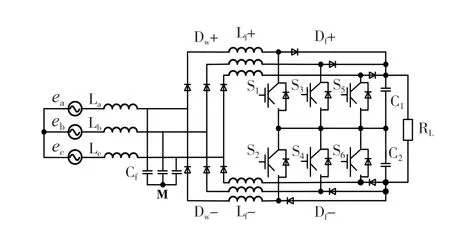
圖1 類VIENNA整流器
在對VIENNA整流器進行建模時,可以將雙向開關管等效成多投開關,得到類VIENNA整流器的簡化模型。由于三相三線VIENNA整流器的電路結構是對稱的,因此以A相為例進行分析:當ea>0時,由于Dw-反向截至A相電流流向只與S1有關。當S1導通時,則UA=0;當S1關斷時,整流器的A相輸入通過Dw+、Df+連接到直流母線電容C1正極,此時UA=0.5Udc(Udc為直流輸出電壓);當ea<0時,此時由于Dw+是反向截至的,因此A相電流流向只與S4有關,當S4導通時,整流器的A相輸入鉗位在直流母線電容中點電壓,則UA=0;當S4關斷時,直流母線電容C2負極通過Dw-、Df-連接到A相輸入,此時UA=-0.5Udc[4]。為了更好地對VIENNA整流器進行理論分析和更精確地設計控制器參數,需要對VIENNA整流器進行建模。假設三相電網輸入平衡,所有元件均為理想狀態,開關頻率遠大于電網頻率[3]。通過clark變換和park變換將三相電網轉化為兩相旋轉坐標系,其簡化數學模型如公式(1)所示。

式中:ed、eq、id和iq為輸入三相交流電源在d-q坐標系下得電壓電流分量;L為交流側等效電感;Udc1、Udc2為直流電壓輸出上下電容電壓;Sdp、Sdn、Sqp和Sqn為d-q坐標系下的橋臂導通函數;ω為角速度。
2 VIENNA整流器的控制策略
2.1 電流內環控制系統設計
由VIENNA整流器在d-q坐標系下的數學模型可以看出,d軸與q軸的變量間存在耦合項,為消除ωLid和ωLiq的影響,采用前饋解耦的控制策略,實現id對iq和無功電流的單獨控制,解耦控制方程如公式(2)所示。

式中:KiP、KiI為電流內環的比例調節參數和積分調節參數;分別為id、iq的電流指令;ud為有功功率電壓;uq為無功功率電壓;s為復頻域,s=jω。
從公式(3)中的d軸與q軸表達式可以看出,解耦后可以實現對無功電流和有功電流的單獨控制。考慮到電流內環的動態性能,需要具有較快的電流跟隨特性,將其設計成I型控制系統,得到電流內環的閉環傳遞函數如公式(3)所示。
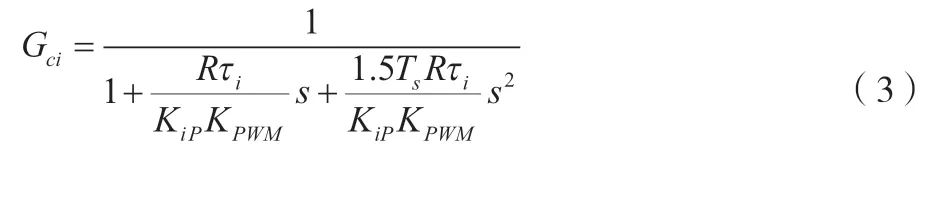
式中:Ts為電流采樣周期;KPWM為整流器脈沖增益系數;R為電阻;τi為電流環時間常數,τi=L/R。
τi=L/R,取ξ=0.707得到公式(4)。

可得電路內環的PI參數如公式(5)所示。

2.2 電壓外環控制系統設計
電壓外環的主要作用是維持輸出電壓的穩定。由于VIENNA輸出存在電解電容,因此在響應速度上應小于電流內環的響應速度[5]。
為增加系統的魯棒性,按典型Ⅱ型控制系統對電壓外環進行設計。為減少干擾與電壓超調量,設定Kup=τuKuI(KuI為電壓環積分系數),定義中頻段帶寬hu=τu/4Ts(τu為電壓環時間常數),為保證在存在干擾的情況下,系統仍可以穩定地運行,取hu=4,并帶入hu=τu/4Ts,得到電壓外環的參數如公式(7)所示。

式中:KuP為電壓環比例系數;KuI為電壓環積分系數;C為電容;udc為直流輸出電壓。
3 仿真分析
為驗證雙閉環控制系統的可行性,在MATLAB/Simulink平臺下搭建仿真模型。VIENNA整流器的仿真參數如下:電網相電壓有效值為220 V,電網頻率為50 Hz,輸入側濾波電感為1 mH,整流側電感為1.5 mH,輸入側濾波電容為5 μF,輸出上下級性電容為660 μF,開關頻率為20 kHz,額定輸出電壓為800 V,額定功率為20 kW。
VIENNA整流器的仿真模型主要包括4個PI控制環路,分別是鎖相環、輸出電壓外環、輸入電流內環以及直流端中點電位平衡環。鎖相環對三相輸入電壓進行計算,得到輸入電壓的相位信息,作為整個控制系統的相位同步基準。電壓外環控制直流輸出電壓的幅值,PI調節器的輸入為直流端的參考給定電壓與直流端輸出電壓的差值。電流內環又包括解耦后d軸電流環和q軸電流環;其中,d軸電流環控制輸入電流的有功分量,它的參考給定是電壓外環的PI輸出;q軸電流環控制輸入電流的無功分量,它的參考給定為0。中點電位平衡環需要配合SVPWM控制調節脈沖[6]。
圖2為VIENNA整流器在額定功率運行下的仿真結果。在0.0 s~0.3 s帶載64 Ω 以10 kW的功率運行,從A相輸入電壓和電流波形,可以看到輸入電流很好地跟隨輸入電壓波形并保持同相位,很好地實現了校正整流器功率因數的功能。對系統進行功率因數分析和FFT分析,當系統穩定運行時,系統的功率因數大于0.995,A相輸入電流總諧波畸變率為2.34%。
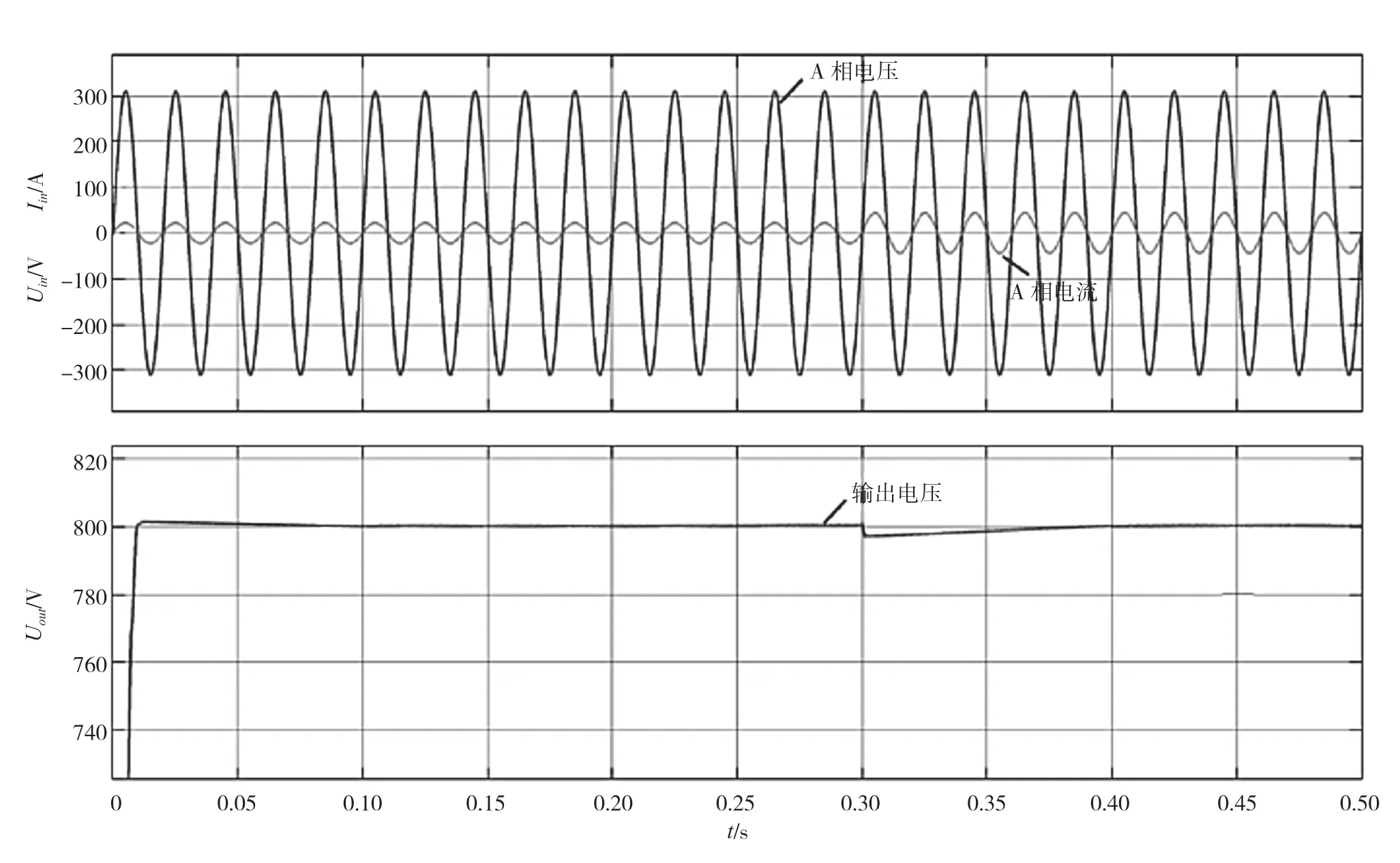
圖2 VIENNA整流器波形圖
從直流輸出電壓波形,可以看出輸出電壓無明顯超調且快速達到穩定狀態。為驗證系統的魯棒性和動態調節特性,在0.3 s時,負載突切為32 Ω,以滿載20 kW的功率運行,可以看出在負載突變時,A相電壓快速響應并無畸變,輸出電壓有一定電壓跌落并在0.1 s內恢復穩定,系統具有良好的動態調節特性[7]。
4 實驗結果分析
為進一步驗證控制策略的合理性和可靠性,制作了1臺額定功率為5 kW的樣機。硬件參數設計與仿真參數相同,選用TI公司的C2000系列TMS320F28035作為主控芯片進行調理電路采樣,保護以及驅動脈沖等工作,并基于IQmath庫進行程序編寫,將定點數轉化為浮點數,進一步加快了運算速度。主功率開關管選用STW45N60M5,低頻二極管選用RHRG5060,高頻二極管選用STTH30L06W。
圖3為VIENNA整流器額定功率下,A相輸入電壓和ABC三相輸入電流波形。從圖3可以看出輸入電流正弦度高,所含諧波較少。A相電流很好地跟隨A相電壓波形,并保持同相位。輸出電壓穩定800 V輸出并且紋波小,中性點位保持平衡并在負載變動時依然保持穩定且具有很好的魯棒性。A相輸入電流的總諧波畸變率為3.9%,功率因數為0.99。實驗結果進一步說明了對VIENNA整流器的原理分析、數學模型建立、控制環路設計以及仿真的正確性。

圖3 A相輸入電壓與三相輸入電流
5 結論
該文以結合LCL濾波器的三相類VIENNA整流器為研究對象進行詳細分析,設計了基于PI控制的電壓外環和基于前饋解耦控制的電流內環雙閉環控制系統,通過MATLAB/Simulink仿真軟件驗證了控制環路參數的正確性,并搭建了1臺5 kW的樣機進行實驗驗證,給出了軟硬件設計選型與相應的實驗波形和測試數據。結果表明,應用該雙閉環控制策略的三相類VIENNA整流器具有控制簡單、輸入電流諧波含量低、系統穩定性高以及動態調節特性好的特點。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36