基于無人機巡檢的圍護結構頂部位移監測模型新方法
2021-11-09 11:36:04魯海霞
中國新技術新產品 2021年16期
關鍵詞:模型
魯海霞 張 偉
(1.河南科技職業大學,河南 周口 466000;2.河南科技大學,河南 洛陽 471000)
0 引言
當前我國基礎設施建設迅速發展,在發展過程中出現了大量深基坑圍護工程,基坑圍護涉及巖土、結構等工程,其圍護的穩定性與施工安全密切相關,而復雜環境、建筑交錯等因素都對基坑圍護的強度和變形造成了影響,增加了圍護體系的風險[1-2]。為了防止圍護變形,對施工過程中的基坑圍護進行監測,設定監測預警值,對基坑開挖時周邊圍護的過大位移進行預警;當位移超過設定值時,及時采取應對措施,保障基坑、地下設施以及周圍建筑的安全[3-4]。
現階段,圍護監測模型的相關研究取得了較好發展,文獻[5]采用基于雙曲函數土體彈簧的圍護監測模型,通過原位測試,獲得了圍護結構土體的非線性彈簧參數,還可以對施工現場的監測數據進行分析,但該模型未采集基坑被動區域的參數,模型監測時所需要的數據量大。文獻[6]采用基于數值模擬的圍護監測模型,計算基坑圍護結構的斷面,測量圍護結構頂部的坑外位移,并將其與數值模擬結果進行對比,但該模型忽略了基坑安全冗余度對圍護體系的影響,模型所需要的數據量也較大。文獻[7]采用基于MATLAB的圍護監測模型,采用MATLAB中的擬合曲線,分析圍護體系的監測數據,結合人工神經網絡預報圍護情況,但該模型選取的神經網絡與擬合曲線的適應度較差,模型更新數據量大。
針對上述問題,該文基于無人機巡檢數據,構建了圍護結構頂部位移監測模型,利用無人機采集圍護結構的航拍數據,并對采集的數據進行處理,得到模擬圍護結構頂部真實形態的點云平面,確定圍護結構的頂部位移,降低監測對實測數據的需求量。
1 圍護結構頂部位移監測模型設計
1.1 基于無人機巡檢獲取圍護結構航拍數據
通過無人機巡檢采集圍護結構的航拍數據。在每個基坑邊布設1~3個觀測墩,在觀測墩頂部安裝整平鋼板作為工作基點,該基點也是無人機固定到達的巡檢點,選取低速低空飛行方案,根據預計的圖形比例尺和地面分辨率確定無人機的飛行高度,在無人機上安裝激光掃描儀和照相機,令激光掃描儀的排列陣面為矩形,采用垂直攝影和傾斜攝影2種方式[8]。無人機攝影高度S如公式(1)所示。

式中:E為像素原件尺寸;a為激光掃描儀鏡頭差距;b為影像地面分辨率[9]。
選擇最小步長節點,最小步長L如公式(2)所示。

式中:vi為第i路段的航跡航程;n為圍護邊的路段總數;I為路段距離的最小值。
將每個路段的方位角偏轉視為路徑偏轉角,計算無人機巡檢的最大路徑偏轉角K,如公式(3)所示。

式中:Pmin為無人機巡檢最小轉彎半徑;O為無人機巡檢速度;gmax為最大法向過載。
無人機巡檢路徑的目標函數如公式(4)所示。

式中:minV為最小目標值;G為懲罰函數;Hj為第j個監測點與相鄰布設點之間的距離;m為圍護結構布設的監測點數量[10]。
根據無人機和激光掃描儀的技術參數對minV進行約束,并求解minV的最優解。根據最優巡檢路徑設置無人機巡檢時與飛行角度相關的參數,使用無人機巡檢航線遍歷布設的所有監測點,獲得圍護結構的航拍數據。至此完成對基于無人機巡檢的圍護結構航拍數據的獲取。
1.2 增強航拍影像中圍護結構邊緣像素
預處理航拍數據,增強影像中圍護結構邊緣的像素。在拍攝設備中讀取圖像,預處理圍護結構航拍數據,將圖像轉化為灰度圖像。降噪轉換后的灰度圖像,并將圖像中大噪聲點、反射強度與周圍點云具有明顯差異的孤立點云當作無用點,對其進行手動剔除。過濾反射強度與周圍點云相近的噪聲點,計算像素點標準偏差Q,如公式(5)所示。

式中:l為像素值的臨界系數;xc為第c個像素點的像素值;C為像素點的總數量;為像素樣本值的均值[11]。
設定標準偏差的閾值,當像素點Q值大于設定閾值時,將其剔除;當Q值小于閾值時,則對其進行保留。完成點云去噪后,劃分圍護結構的目標像素點、地面植被的干擾像素點,分類和過濾點云數據,遍歷并提取目標像素的邊緣。將掃描得到的目標質心作為特征向量,并將包括圍護結構的圖像加入陣列,計算每幅影像質心的坐標數據。設過濾后的圖像為h(x,y);其中,(x,y)為像素位置,d、e分別為x方向、y方向最大坐標和最小坐標的中間值,則質心位置R如公式(6)所示。

式中:P為無人機巡檢轉彎半徑;K為點云圖像的特征值。
結合時間參數和質心位置預測下一位置的目標質心,計算每幅紅外圖像中所有的質心坐標。其中,時間參數為影像中相鄰2幅紅外圖像的間隔,連接時間參數后得到連續軌跡,使圍護結構目標軌跡趨向穩定[12]。把圖像灰度概率分布作為直方圖變換的基礎,將灰度概率視為基本算子,像素點變換公式如公式(7)所示。

式中:w為基礎算子;f、g均為基礎算子的映射集合;Δf、Δg分別為各集合中基礎算子的增量值;hf(w)、hg(w)分別為集合f、g中的基礎算子灰度值。
通過公式(7)將集合f中的灰度值轉換至集合g,使輸出像素點灰度值位于[g,Δg]中,并輸出直方圖。
設灰度直方圖為h(x,y),根據直方圖的分布積分函數調整映射后的灰度,得到灰度分布函數J如公式(8)所示。

式中:u為像素灰度級的級數;X、Y分別為x方向、y方向的像素點數量;rk為同一灰度級的像素點數量。
以公式(8)為基礎,將圍護結構圖像灰度進行非線性變換,使像素點灰度概率與灰度級相對應,從而增強灰度圖像中圍護結構的輪廓像素。至此完成增強航拍影像中圍護結構邊緣像素的任務。
1.3 構建圍護結構頂部位移監測模型
沿著邊緣輪廓分割每幅圖像的圍護結構邊緣,并對分割數據進行匹配,建立用于圍護結構頂部位移監測的模型。連接圍護結構邊緣輪廓的像素點,把輪廓內的圖像像素點劃分為多個不同的子集,令子集歸屬于連續的局部區域內,在連續曲線上取固定距離,計算每段曲線的梯度幅值Z(x,y)和梯度方向U(x,y),如公式(9)所示。

式中:Wx、Wy分別為x方向、y方向的曲線固定距離;β為連續曲線相對x軸的夾角。
把梯度幅值Z(x,y)和梯度方向U(x,y)輸入卷積模板,多次迭代更新后,把梯度幅值和方向處于同一位置的像素點作為特征點。為每個特征點選擇一個主方向,沿著主方向配準特征像素點,過程中保持特征矢量旋轉不變,尋找每個特征點的最佳旋轉空間,使特征點投影到另一幅紅外圖像的特征點。投影空間M如公式(10)所示。

式中:T為協方差矩陣;N為無人機各拍攝角度相同特征點的數量;s1、s2分別為連續曲線特征點處的最大斜率、最小斜率。
將協方差矩陣T作為投影空間中的第一主成分,在M值的范圍內改變協方差矩陣的取值,最小化特征點的歐式距離,直至2幅紅外圖像的圍護結構完全配準,過程表達式如公式(11)所示。

式中:minF為最小歐式距離;t(x,y)、z(x,y)分別為目標點集、參考點集的配準坐標;o為不同攝影角度的點云數據關聯參數;M'為投影空間中對協方差矩陣的修改增量。
通過公式(11)對多個掃描角度的點云數據進行精細配準,然后將圍護結構頂部的邊緣輪廓切割成多份,將每個小份擬合成一個平面,柵格化處理圍護結構頂部,柵格化處理圍護結構頂部位移圖像后將其劃分至小正方體中,使每個對應的平面分配相等的體積,從而得到三維點云的最佳逼近平面。使用該最佳逼近平面表示圍護結構頂部的真實空間,根據小正方體內的像素坐標,結合圖形比例尺確定圍護結構頂部監測點的三維空間數據。設置圍護結構頂部位移的監測周期,記錄各監測周期下監測點的位置坐標,得到圍護結構頂部的位移量。至此完成對圍護結構頂部位移監測模型的構建,完成基于無人機巡檢對圍護結構頂部位移監測模型進行設計的工作。
2 實證研究
將該設計模型與基于雙曲函數土體彈簧的圍護監測模型(文獻[5])、基于數值模擬的圍護監測模型(文獻[6])以及基于MATLAB的圍護監測模型(文獻[7])進行對比實驗,比較模型監測頂部位移時需要更新的數據量的大小。
2.1 基坑圍護工程概況
選取某基坑工程作為研究對象,該項目位于某市市中心,基坑開挖形式為放坡開挖,整體呈矩形,長度和寬度大約為179 m、96 m,占地面積約為17 184 m2,最大開挖深度為4.1 m,力學性質較差,土質為粉質黏土,深度為5 m~12 m。基坑圍護結構采用復合式土釘墻,預埋鋼筋的長度為20 cm,鋼筋頭磨成半球狀,鋼筋露出地面的長度為20 mm,圍護結構冠梁頂的鉆孔孔深為90 mm,觀測墩尺寸大小為140 mm×140 mm×280 mm。由于地質問題,因此造成圍護樁體下部咬合出現偏差,圍護結構頂部出現變形,圍護結構頂部變形標準為最大位移量小于50 mm。
2.2 建立模型
為了準確分析該工程圍護結構的頂部位移,每隔20 m沿直線設置1個監測點,整體監測區域為矩形,在2個長邊布置7個監測點,2個短邊布置5個監測點,使用直徑為10 cm的圓形紅色貼紙作為標靶并黏貼在監測點,具體分布位置如圖1所示。

圖1 圍護結構監測點布置
在基坑長邊兩側每隔32 m布設1個觀測墩,由內導對工字鋼進行焊接,工字鋼總長為5 m,夯入深度為4 m,在監測點附近安裝灌注樁,尺寸大小為20 mm×20 mm×30 mm。根據圖1所示的監測點和工作基點,應用Z字形的飛行方案,采用六旋翼無人機配置PLS8970型號激光掃描儀和工業照相機,設置的無人機飛行攝影參數見表1。

表1 無人機飛行攝影參數
分析處理掃描得到的點云數據,生成模擬圍護結構頂部真實空間的三維點云,確定結構頂部的位移量。
2.3 實驗結果分析
首先輸入模型的基礎數據,監測過程中不斷更新模型監測參數的實測數據,使其監測水平方向的圍護結構頂部的位移,監測結果如圖2所示。

圖2 圍護結構頂部水平位移監測結果
當4種模型在各個監測周期中的監測值能夠連接成線時,就可以判定監測結果符合圍護結構頂部實際的位移情況;因此,當達到圖2所示的監測值時,停止實測數據的更新。統計4種模型的數據更新量,實驗結果如圖3所示。
如圖3所示,當設計模型輸出圍護結構水平位移的監測值時,每個監測周期的平均數據更新量為2 240 MB,基于雙曲函數土體彈簧的圍護監測模型平均數據更新量為2 990 MB,基于數值模擬的圍護監測模型平均數據更新量為3 910 MB,基于MATLAB的圍護監測模型平均數據更新量為4 230 MB,設計模型數據更新量分別減少了750 MB、1 670MB以及1 990 MB。豎直方向監測結果如圖4所示。

圖3 水平位移監測數據更新量實驗對比結果
當模型輸出監測值達到圖4所示的數據時,無斷點且能夠表示豎直方向實際位移量時,停止數據量更新,此時已更新的數據量如圖5所示。
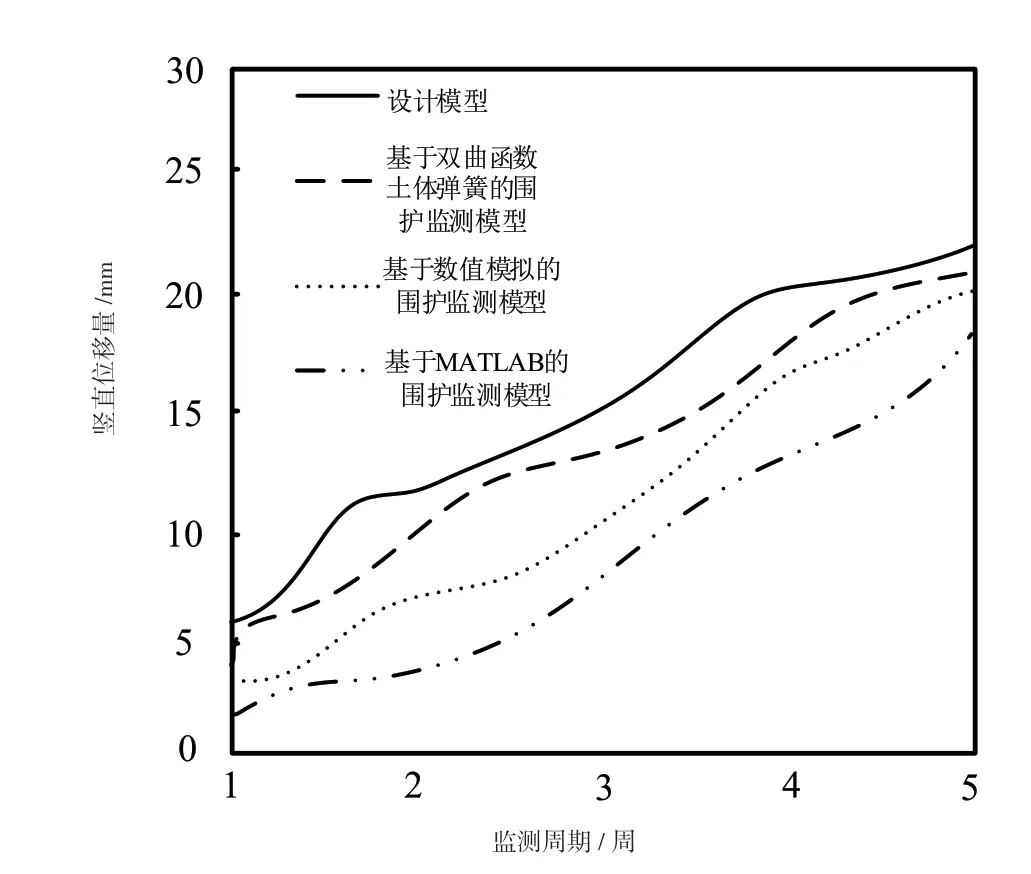
圖4 圍護結構頂部豎直位移監測結果
由圖5可知,當設計模型輸出圍護結構豎直位移的監測值時,每個監測周期的平均數據更新量為2 520 MB,基于雙曲函數土體彈簧的圍護監測模型平均數據更新量為3 310 MB,基于數值模擬的圍護監測模型平均數據更新量為3 960 MB,基于MATLAB的圍護監測模型平均數據更新量為4 310 MB,設計模型數據更新量分別減少了790 MB、1 440 MB以及1 790 MB。綜上所述,當該設計模型完成位移監測時,利用無人機巡檢圖像作為基礎數據,并將其預處理后的結果作為圍護結構頂部位移監測輸入,可以使模型的更新數據量更少,減少了對實測數據的需求,降低了圍護結構勘察的工作量。

圖5 豎直位移監測數據更新量實驗對比結果
3 結語
該研究利用無人機對圍護結構頂部進行巡檢,建立了一種位移監測模型,相比于常用模型,該模型降低了對圍護結構勘察數據量的需求;同時,以無人機巡檢生成圖像數據作為模型輸入,可以在一定程度上減少數據采集所耗費的時間,減少勘察的工作量。在今后的研究中,需要進一步討論模型的適用條件,使用更適用的監測數據處理方法對圍護結構進行有效反饋。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19