敏捷SAR 衛星平臺載荷一體化控制方法研究
2021-11-08 12:47:28張永強劉德慶陳筠力于迎軍吳敬玉
上海航天 2021年5期
張永強,王 赟,劉德慶,陳筠力,于迎軍,吳敬玉
(1.北京跟蹤與通信技術研究所,北京 100094;2.上海衛星工程研究所,上海 201109;3.上海航天控制技術研究所,上海 201109;4.上海航天技術研究院,上海 201109)
0 引言
近年來,隨著星載合成孔徑雷達(Synthetic Aperture Radar,SAR)系統技術的發展,特別是輕型天線等技術的應用,使得性能高、質量小、反應快、成本低的輕量化SAR 衛星的研制成為可能。輕量化SAR 衛星通過協同工作的方式,在特定目標的搜索發現、識別確認、跟蹤監視、目標指示、長時間連續覆蓋、高頻多重覆蓋等方面越來越顯示出其特有的優勢,成為國內外航天領域研究的熱點之一[1]。
采用相控陣體制的SAR 天線具備模塊化、波束賦形功能強大等優點,易實現與衛星平臺一體化設計,在輕量化設計方面具有明顯優勢[2]。而由于具備二維載荷波束電掃描能力的傳統大型相控陣天線結構復雜,造價高昂,質量較大,難以適用于小衛星。故需要以載荷有限波束掃描能力與平臺的機動能力配合工作來實現傳統大型衛星的成像效果。此外,可以通過衛星的高精度敏捷姿態機動能力增加衛星的工作模式,使得衛星工作模式靈活機動,增強衛星獲取信息的能力。如:通過衛星的姿態機動或波束掃描,以不同的視角觀測,可以獲取被觀測區域的更多維信息量,增強目標識別能力;通過二維姿態導引,可以提高SAR 的圖像質量[3];通過機動和波束掃描結合,還可以更好地進行多目標獲取,提高多目標獲取能力[4]。文獻[5]提出可通過敏捷衛星的姿態機動實現SAR 滑動聚束成像。文獻[6-10]研究了敏捷衛星通過姿態機動的方式,實現聚束成像、視頻成像等成像模式,并給出了相應的姿態機動策略。但是,這些研究均是從敏捷平臺配合固定有效載荷的方式出發,通過姿態機動完成成像過程所需載荷波束掃描。在此基礎上,使用敏捷平臺配合具備一維波束掃描能力的SAR 載荷,將具備更高的靈活性和成像能力。
同時,為提高圖像信息獲取能力,輕量化SAR衛星也往往采用大尺寸、大質量的天線,并且對衛星姿態敏捷機動能力提出更高的要求[11]。使用傳統飛輪作為主執行機構,只能實現0.1~1.0(°)/s 的最大機動角速度,難以滿足高時間分辨率要求[11]。使用單框架控制力矩陀螺(Single Gimbal Control Moment Gyroscopes,SGCMG)作為小衛星的姿態機動控制執行機構,可有效提高敏捷平臺姿態機動能力,更好地配合載荷完成成像任務。文獻[12-13]論述姿態機動路徑快速規劃和跟蹤控制結合的姿態閉環控制策略,提出了避免SGCMG 奇異的方法。
本文系統性地分析了具備一維波束掃描能力的小型SAR 衛星通過平臺機動與載荷波束掃描配合成像時對姿態的需求。針對成像姿態需求對平臺快速機動的要求,提出了采用小型化SGCMG 作為執行機構的方案,通過改進型遞階飽和控制方法,實現衛星高指向精度高穩定度控制與敏捷機動。
1 采用SGCMG 的動力學模型
系統本體系相對于參考系的姿態用四元數Q=q0+q1i+q2j+q3k表示,對于本體系相對于參考系的角速度在本體系分量ω=[ωx ωy ωz]T,姿態變化的角速率可描述為[14]

對于采用SGCMG為執行機構的系統,衛星動力學在衛星本體坐標系的表示為[15-16]

式中:I為系統慣量矩陣;T為作用于系統的外力矩;ω×為ω的叉乘或反對稱斜方陣;為SGCMG 系統的 框架角速度矢量;H為SGCMG 系統合成角動量在本體坐標系下的表示;C為SGCMG 系統輸出的力矩矩陣。
2 成像基準姿態確定
2.1 條帶成像
條帶模式成像要求控制天線波束指向在方位向和距離向固定不變,以進行連續高分辨率的成像。敏捷SAR 衛星通過控制平臺側擺飛行的方式,保持SAR 天線波束實際指向與飛行方向之間的固定夾角,實現條帶模式成像。同時,利用俯仰方向姿態偏置實現大角度斜視保證高分偵察的時效性,SAR 天線距離向波束掃描實現目標快速切換,提高區域觀測響應能力,條帶成像示意圖如圖1所示。圖中:θL為成像距離向下視角(簡稱“下視角”);θ為成像方位向斜視角(簡稱“斜視角”);φcs為衛星左右側視基準角度(簡稱“側視角”)。

圖1 條帶成像示意圖Fig.1 Schematic diagram of strip imaging
為提高敏捷性,平臺通過繞慣量主軸機動的方式配合載荷成像。采用本體坐標系相對軌道坐標系 123 轉序或 312 轉序計算基準姿態角和雷達波束掃描角λ,衛星本體相對軌道坐標系姿態通過繞本體Xb軸和Yb軸旋轉后不需要再繞Z軸旋轉,故ψm=0,第一次繞Xb軸旋轉實現左右側視,故φm=φcs。
繞Yb旋轉角度θm和雷達波束掃描角λ計算方法如下:

將基準姿態角(123 轉序或312 轉序)轉換為基準姿態四元數qm,基準姿態角速度為ωm=[ 0 0 0]T。
2.2 多條帶拼接成像
衛星通過繞Yb軸姿態機動實現從前斜視到正側視再到后斜視的不同角度下觀測,配合載荷距離向波束掃描,通過掃描條帶拼接,可實現大幅寬成像。
多條帶拼接成像的基準姿態建立過程與條帶成像相同(如圖2 所示),但是對姿態機動速度要求高,前一次成像結束到下一次成像開始之間的姿態機動必須在指定的時間內完成,否則影響后一次成像性能,甚至導致多條帶拼接成像任務失敗。

圖2 多條帶拼接成像示意圖Fig.2 Schematic diagram of multi-strip splicing imaging
2.3 滑動聚束成像
滑動聚束模式通過控制天線波束在方位向的旋轉速度,從而控制天線輻照區在地面的移動速度,實現高分辨率大面積滑動聚束成像,如圖3 所示。傳統大型相控陣天線通過波束捷變切換方式實現旋轉速度控制,受角度量化誤差影響,無法實現連續變化。對于敏捷SAR 衛星,通過控制平臺連續轉動實現波束控制,可以更精確地實現滑動聚束模式,提高SAR 方位向分辨率。

圖3 滑動聚束成像示意圖Fig.3 Schematic diagram of sliding bunching imaging
給定轉動中心虛擬目標,可建立衛星指向目標的參考姿態基準。地心至目標的矢量ret在軌道坐標系的表示為

式中:[xet_gyet_gzet_g]T為在WGS84 地球固聯坐標系下的目標點坐標;ATgi為J2000 慣性坐標系到WGS84 地球固聯坐標系的旋轉矩陣;Aoi為J2000 慣性坐標系到軌道坐標系的旋轉矩陣。
衛星至地心的矢量在軌道坐標系表示為rse=[0 0r]T,則衛星到目標的矢量為

衛星指向虛擬目標示意圖如圖4 所示。為了確定相對軌道坐標系的基準姿態,將指向表示在軌道坐標系下,如圖5 所示。r1為衛星無姿態偏置時電掃方向,為了實現電掃指向虛擬目標點,衛星姿態按照相對軌道坐標系先繞X軸旋轉φm實現電掃方向指向r2,再繞與r2垂直方向旋轉θm實現電掃方向指向rst。

圖4 衛星指向虛擬目標示意圖Fig.4 Schematic diagram of satellite pointing to a virtual target

圖5 滑動聚束成像基準姿態確定示意圖Fig.5 Schematic diagram of reference attitude of sliding bunching imaging
記rst=[rx ry rz]T,兩次旋轉角度φm和θm分別為

式中:λ為預置的雷達波束掃描角。
采用相對軌道坐標系的四元數描述滑動聚束成像基準姿態可表示為

式中:?為四元數乘法。
對四元數按照以下運動學逆方程求取目標姿態角速度ωm:

式中 :為q對時間 的導數,qm=[qm0qm1qm2qm3]T;qm0為四元數標量。
3 控制器設計
定義目標姿態的虛擬動坐標系為“m”系,目標姿態相對軌道坐標系的四元數為qm,星體相對軌道坐標系的四元數為qb,目標姿態相對軌道坐標系的角速度為ωm,星體相對軌道坐標系的角速度在本體系表示為ωb,目標姿態相對軌道坐標系的角加速度為am。除了ωm、am是表示在目標姿態的本體系下外,其他矢量都是表示在衛星本體坐標系下。
姿態四元數誤差和姿態角速度誤差分別表示為

式中:A(qe)為星體姿態相對目標姿態的旋轉矩陣;,其 中,qev為qe的矢量部分;ωb=ωs-A(qb)ωo,其中,ωs為星體慣性角速度。
采用基于四元數和姿態角速度反饋的改進型遞階飽和控制算法,控制衛星當前姿態向目標姿態qm趨近,可得反饋控制力矩如下:

式中:ωe為姿態角速度誤差在控制基準坐標系下的表示;qev為誤差四元數的矢量部分;K、D、Ki為控制參數常值對角陣;sa(t)為限幅,上標和下標分別對應限幅上限和下限。
qevmax是控制器中四元數偏差的限幅值,采用矢量限幅的方式,即

將式(12)代入式(2),得到誤差姿態動力學方程為

式中:ωs為衛星本體相對慣性系的角速度;hg為控制力矩陀螺群合成角動量;ωo為軌道角速度在軌道系下的表示,近圓軌道ω˙o≈0,橢圓軌道ω˙o通過星上實時計算得到;ω?為ω的斜對稱矩陣。
所以,設計前饋控制力矩為

指令控制力矩為

4 仿真試驗
以敏捷SAR 衛星的姿態機動控制為例,轉動慣量參數見表1。
SGCMG 系統配置5 臺10 N·ms 控制力矩陀螺,采用五面錐構型,錐頂角為β=45°,如圖6所示。
設置仿真初始姿態[2 2 2 ]°,初始慣性角速度[0.010 -0.050 0.010](°)/s,0~100 s 衛星處于對地平飛姿態,100 s 后先后機動至前側視37°狀態、平飛狀態、后側視37°狀態。仿真中控制力矩陀螺群操縱律采用文獻[14]所描述方法,仿真結果如圖7~圖11 所示。

圖7 連續機動的姿態角變化Fig.7 Attitude angle of multiple maneuver
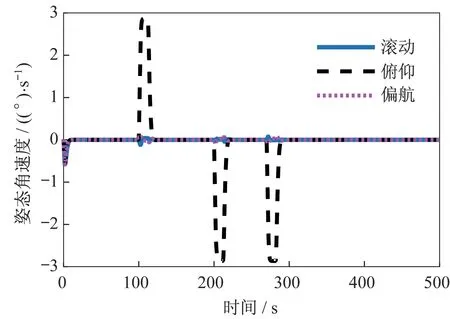
圖8 連續機動的姿態角速度變化Fig.8 Attitude angle velocity of multiple maneuver

圖9 連續機動的姿態角誤差Fig.9 Attitude angle error of multiple maneuver

圖10 連續機動的姿態角速度誤差Fig.10 Attitude angle velocity error of multiple maneuver

圖11 連續機動的控制力矩陀螺外框角位置Fig.11 SGCMG frame angle of multiple maneuver
由仿真結果可知,所設計的控制系統在26 s 內繞衛星俯仰軸機動37°并實現0.01°指向精度和0.001(°)/s 穩定度,最大機動角速度為2.800(°)/s。
給定如下虛擬目標見表2,對衛星指向跟蹤目標進行仿真。

表2 虛擬目標位置Tab.2 Coordinates of the virtual target
仿真初始姿態[2 2 2 ]°,初始慣 性角速 度[0.010 -0.050 0.010 ](°)/s,平緯度幅角150°,恒星時角102.976°。100 s 開始向指向跟蹤基準姿態機動,300 s 滑動聚束成像任務完成,姿態轉對地平飛。仿真結果如圖12~圖17 所示。

圖12 滑動聚束模式姿態角變化Fig.12 Attitude angle of sliding bunching mode
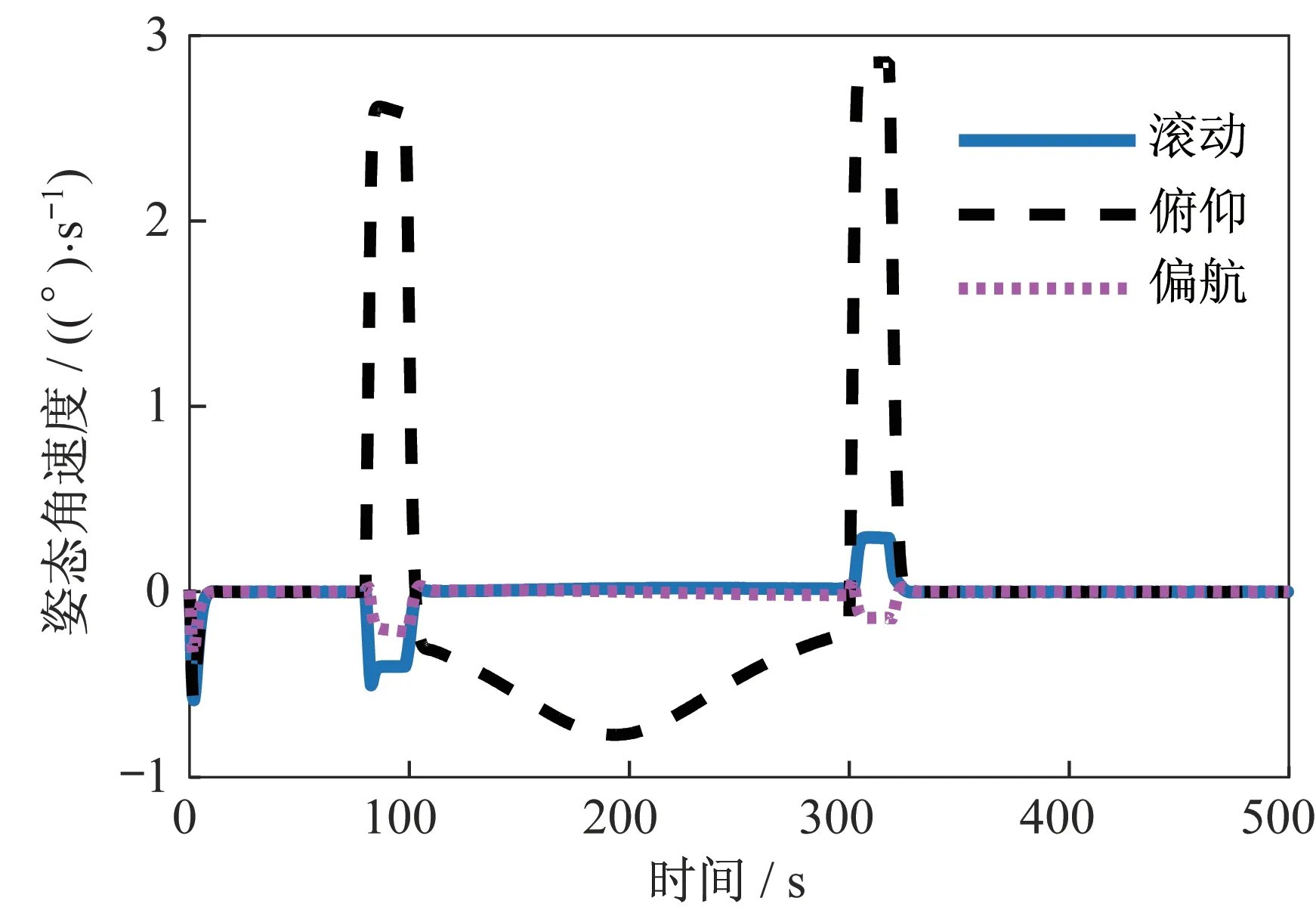
圖13 滑動聚束模式姿態角速度變化Fig.13 Attitude angle velocity of sliding bunching mode

圖14 滑動聚束模式的姿態角誤差Fig.14 Attitude angle error of sliding bunching mode

圖15 滑動聚束模式的姿態角速度誤差Fig.15 Attitude angle velocity error of sliding bunching mode

圖16 滑動聚束模式的控制力矩陀螺外框角位置Fig.16 SGCMG frame angle of sliding bunching mode

圖17 跟蹤過程中波束指向在地球表面投影Fig.17 Beam points to a projection on the earth’s surface
由仿真結果可以看出,所設計的控制系統在指向跟蹤目標點時,姿態角跟蹤精度可達0.002°,姿態角速度跟蹤精度可達0.000 7(°)/s,波束中心指向控制偏差優于5 m,實現了SAR 載荷高波束瞄準精度和高成像質量。
5 結束語
傳統SAR 衛星為了實現快速響應和高分辨率成像,需要載荷具備二維電波束掃描能力,導致衛星造價昂貴,并且電波束掃描無法實現連續波束角切換。
本文提出使用具備一維電波束掃描能力的SAR 載荷結合衛星平臺姿態敏捷機動,實現傳統SAR 衛星二維電波束掃描具備的成像功能,并且在雷達波束掃描角固定情況下,通過平臺機動可實現連續的波束角切換,提高成像分辨率。針對載荷波束指向捷變掃描與平臺姿態敏捷機動一體化控制實現SAR 成像方案,提出了典型成像模式包括條帶成像模式、多條帶拼接模式和滑動聚束成像模式對姿態的機動需求與跟蹤策略;給出基準姿態確定算法,構建基于SGCMG 系統的衛星姿態控制系統,引入基于姿態四元數和角速度反饋的改進型遞階飽和控制算法;實現了衛星大角度敏捷機動和穩定跟蹤控制,通過數學仿真結果表明了該控制方案的有效性。