基于封閉辦公園區的自動駕駛場景分析
2021-11-03 11:10:47王士焜,蘇芮琦,張峻熒,黃波
汽車科技 2021年5期
王士焜,蘇芮琦,張峻熒,黃波

摘? 要:目前,自動駕駛汽車逐漸商用于封閉辦公園區,如物流車、觀光車。自動駕駛汽車的開發驗證需要大量的實車道路測試,實車道路測試存在成本高、周期長、無法復現極端場景,因此基于封閉辦公園區場景的仿真測試是解決自動駕駛開發驗證的主要途徑。為真實還原物流車、觀光車等自動駕駛汽車的行駛環境,本文基于封閉辦公園區的道路特征,并結合相關標準整理并分析得出適用于封閉辦公園區的自動駕駛汽車功能,梳理出適用于封閉辦公園區的測試用例,并通過控制器在環方式驗證。試驗表明該測試用例能夠基本滿足自動駕駛控制器的測試需求。
關鍵詞:封閉辦公園區;道路特征;自動駕駛
中圖分類號:U463.5? ? ? 文獻標識碼:A? ? ? 文章編號:1005-2550(2021)05-0059-07
Analysis of Autonomous Driving Scenarios Based on
Closed Office Parks
WANG Shi-kun, SU Rui-qi, ZHANG Jun-ying, HUANG Bo
( Xiangyang Motor Automobile Testing Center CO.LTD, Xiangyang 441004, China)
Abstract: At present, Autonomous vehicles are gradually being used in closed office parks, such as logistics vehicles and sightseeing vehicles. The development and verification of autonomous vehicles requires a large number of real-vehicle road tests. Real-vehicle road tests have high costs, long cycles, and extreme scenarios that cannot be reproduced. Therefore, simulation testing based on closed office park scenarios is the main way to solve autonomous driving development verification. In order to truly restore the driving environment of autonomous vehicles such as logistics vehicles and sightseeing vehicles, this article is based on the road characteristics of closed office parks, and combined with relevant standards to sort out and analyze the functions of autonomous vehicles suitable for closed office parks. The test cases of the office park are verified by the controller-in-the-loop method. The test shows that the test case can basically meet the test requirements of the autopilot controller unit.
自動駕駛汽車成為行業的新熱點,如何提升測試效率、精進技術,成為行業內迫切需要解決的問題。此時,虛擬仿真測試的重要性就體現出來了,成為了自動駕駛汽車商業化應用前不可缺少的環節。仿真測試與實車道路測試相比具有測試效率高、成本低、周期短等優點。目前,逐漸商用的自動駕駛汽車主要應用于封閉園區,因此通過搭建典型的封閉辦公園區場景,高度還原真實中典型場景、極端場景,對自動駕駛汽車的開發測試具有現實意義。本研究立足于國內自動駕駛的主要測試標準,并以中國封閉辦公園區的典型場景作為研究對象,在仿真環境中高度還原中國典型封閉辦公場景,梳理出適用于封閉辦公園區的測試用例,為應用于封閉辦公園區的物流車、觀光車等自動駕駛汽車開發設計驗證提供參考和支撐。
1? ? 自動駕駛汽車仿真測試
隨著自動駕駛技術的不斷發展,自動駕駛汽車逐漸商業化,如物流車、無人售賣車、觀光車等。由于自動駕駛汽車復雜多樣的功能直接關系到用戶生命與財產安全,在投入使用之前,如何測試和驗證其功能和性能是整車廠極其關注的。傳統的實車測試在試驗成本、試驗周期、安全性等方面滿足不了自動駕駛汽車復雜功能的開發驗證需求。
2020年2月24日,發改委、工信部等11個國家部委聯合出臺了《智能汽車創新發展戰略》(以下簡稱《戰略》),建立健全智能汽車測試評價體系重點研發虛擬仿真、軟硬件結合仿真等測評技術,開展特定區域智能汽車測試運行及示范應用等。可見,仿真測試驗證已成為智能網聯汽車功能開發、技術驗證以及認知提升中不可或缺的環節,可以有效加速技術研發進場與產業化步伐。
在2019年世界智能網聯汽車大會中發布的《北京市自動駕駛模擬仿真測試平臺要求》,主要用于指導智能網聯汽車以及自動駕駛車輛模擬測試平臺進行規范化建設。標準的目的是引導智能網聯仿真測試行業進行規范化建設,完善仿真測試能力,能夠更加合理準確地對車輛或者自動駕駛系統的能力進行檢測評估,推動自動駕駛技術加快示范運行和商業落地。智能網聯仿真已成為智能網聯汽車評價的基準之一,是智能網聯汽車測試驗證中不可缺失的一環。
仿真測試,建立靜態道路場景、動態交通場景,可以將真實傳感器、控制器深度集成在仿真環境中,讓自動駕駛汽車在虛擬的道路場景中進行測試。仿真測試的具有持續性和可回歸性的特點,可以對某些測試場景進行重復性測試,這樣更容易發現與定位問題,問題解決后的回歸性測試,能大大提高自動駕駛汽車開發驗證效率等。
2? ? 封閉辦公園區的道路特征
遍布全國的測試場,為自動駕駛汽車的大規模測試提供了有利條件,但隨著測試場規模的擴大,測試場規劃設計的同質性也逐漸顯露,且不適用主要應用于封閉園區的自動駕駛汽車,如終端物流車、觀光車等。在滿足基本測試要求的基礎上,真實還原典型的封閉辦公園區場景,擴大適用于封閉辦公園區場景覆蓋范圍,以適應更加復雜多變的國內辦公園區的道路交通環境。
封閉辦公園區的道路總體特征是:基礎道路環境簡單、道路結構化程度高、路口的曲率半徑較小。應用于封閉辦公園區的自動駕駛汽車,一般為觀光車、物流車等,行駛路線固定,速度一般在30km/h以內。
2.1? ?典型橫斷面
封閉辦公園區的橫斷面比較單一,幾乎都是單幅路,以簡單圖示的方式表示易于理解,同時總結該典型斷面形式的特點以及該斷面形式在實際情況中存在的問題,具體情況如下:
特點:
(1)無非動車道,非動車利用機動車道或人行道(若有)通行;
(2)相向機動車流存在對向干擾,機動車的行駛速度較低;
在封閉辦公園區中,一般都為雙向兩車道,單向車道寬為3.2米以內,部分主干道可能存在3.75~4米路寬;封閉辦公園區車輛構成有小汽車、自行車、電動車、三輪電動車,各種車輛混行在機動車道,同時存在行人在機動車道上與各種車輛混行;因此在設置封閉辦公園區的場景時,應結合實際情況,充分考慮可能出現的情況,將相關元素加入到場景中去,如對向車道行駛在本車道上、多個行人行走在機動車道上、自行車/電動車/行人混合交通流。
有些雙向兩車道還設有路面停車位,那么停車位處車輛的行駛情況也會對測試車輛產生影響,所以也應該考慮將這一情況的測試場景。
2.2? ?彎道
在彎道行駛中,只能看到一部分彎道線形;受彎道周圍景觀等因素影響,駕駛員難以看到障礙物遮擋的彎道線形。由于車輛需要繼續向前行駛,因而可能產生安全隱患造成事故的發生;封閉辦公園區的彎道一般為雙向兩車道,同時存在單向彎道。彎道曲率半徑較小。多為40~90米。彎道旁邊的植物繁茂,降低自動駕駛汽車探測目標的能力,無法預先識別前方行人、障礙物等。在實際情況中應考慮在彎道行駛中行人橫穿馬路,車輛緊急制動的場景。
2.3? ?平面交叉口
平面交叉路口時一個具有很大挑戰性的交通場景,也是非常容易發生交通事故的地方,因此車輛通行平面交叉口的測試也是相當值得關注的一個點。 封閉辦公園區平面交叉路口的形式較為固定,主要有十字形、X形、T形,同時也存在一些錯位交叉路口。路口的曲率半徑較小,多為5~9米。具體形式如下簡圖所示:
2.3.1 有信號燈控制的交叉口
對于有交通信號燈的平面交叉口來說,自動駕駛汽車在經過路口,作出駕駛行為時,一定要遵守的就是交通規則,那么自動駕駛汽車首先要識別的就是交通燈,根據交通燈的顯示來選擇下一步動作。對于封閉辦公園區的交叉路口來說,一般都為雙向兩車道。交叉口的交通燈時序簡單,當前車道的交通燈可同時控制當前車道和對向車道車輛的左轉和直行,這就會存在沖突點,例如,當前車道車輛直行,對向車輛左轉;封閉辦公園區中存在交叉口無人行橫道燈或有人行橫道燈但行人闖紅燈。道路中應考慮人車路三要素,在實際情況中考慮自動駕駛車輛與其他車輛/行人存在的沖突點。
2.3.2 無信號燈控制的交叉口
面臨無交通信號燈的交叉口時,人開車都需要小心翼翼地試探。對于自動駕駛車輛來說,交叉口可能存在建筑物或植物等遮擋,感知系統可能無法檢測到其他車輛,因此自動駕駛汽車在無信號燈路口的通行更是仿真測試關注的一個點。因此在搭建場景時,更應考慮自動駕駛汽車與周圍車輛/行人的沖突點,甚至多個車輛/行人存在沖突。
2.4? ?交通設施
結合《道路交通標志和標線》(GB 5768)進行標志標線的分析,有助構建適用于封閉辦公園區場景的設施要素。
2.4.1 交通標志
GB 5768中規定共包含7類主標志和1類輔助標志,包括禁令標志、旅游標志、指路標志、警告標志、作業標志、指示標志和告示標志,其中具備法理性的主要是禁令和指示標志。禁止和指示標志主要是禁止或限制、指示車輛交通行為的標志。由于封閉辦公園區的道路特征有外部道路有明顯區別,因此GB 5768標準中并非所有的禁令和指示標志適用于封閉辦公園區。例如,封閉辦公園區的車速一般在30km/h以內,因此僅需30 km/h限速牌即可,同時指示標識中的路面指示箭頭,如左轉、直行、右轉箭頭等,其尺寸應按照標準中0-40km/h的尺寸規范。結合封閉辦公園區的道路特征,分析整理出適用于封閉辦公園區的交通標志,具體見下表:
2.4.2 交通標線
同理,結合封閉辦公園區的典型道路特征,分析整理出適用于封閉辦公園區的交通標志。詳見表2:
對于自動駕駛汽車,必須識別和理解交通標志和標線,從而遵守交通法規。交通標識自動檢測和有效識別能力是開發人員所關注的。在真實的封閉辦公園區中,交通標識和標線會出現褪色、遮擋、破損等,因此在仿真環境應該覆蓋該工況,并盡可能地包含實車測試難以達到的工況。虛擬場景中仿真自動駕駛汽車檢測和識別交通標識和標識,以及在惡劣天氣下(雨、雪、霧等)的識別具有非常重要的現實意義。
根據封閉辦公園區的典型道路特征,在場景仿真軟件搭建虛擬道路場景,部分如下圖所示:
3? ? 適用于辦公園區的自動駕駛功能
應用于封閉辦公園區的自動駕駛車輛在行駛在指定場景下,能夠全方位的掌控周圍環境,遵守交通規則,及時有效地對交通環境作出反應。參考汽標委發布的《智能網聯汽車自動駕駛功能測試規程(試行)》,并結合封閉辦公園區的典型特點,如車速較低、同向僅單車道等特點,整理出適用于封閉辦公園區的自動駕駛功能。見表3:
4? ? 測試用例大類
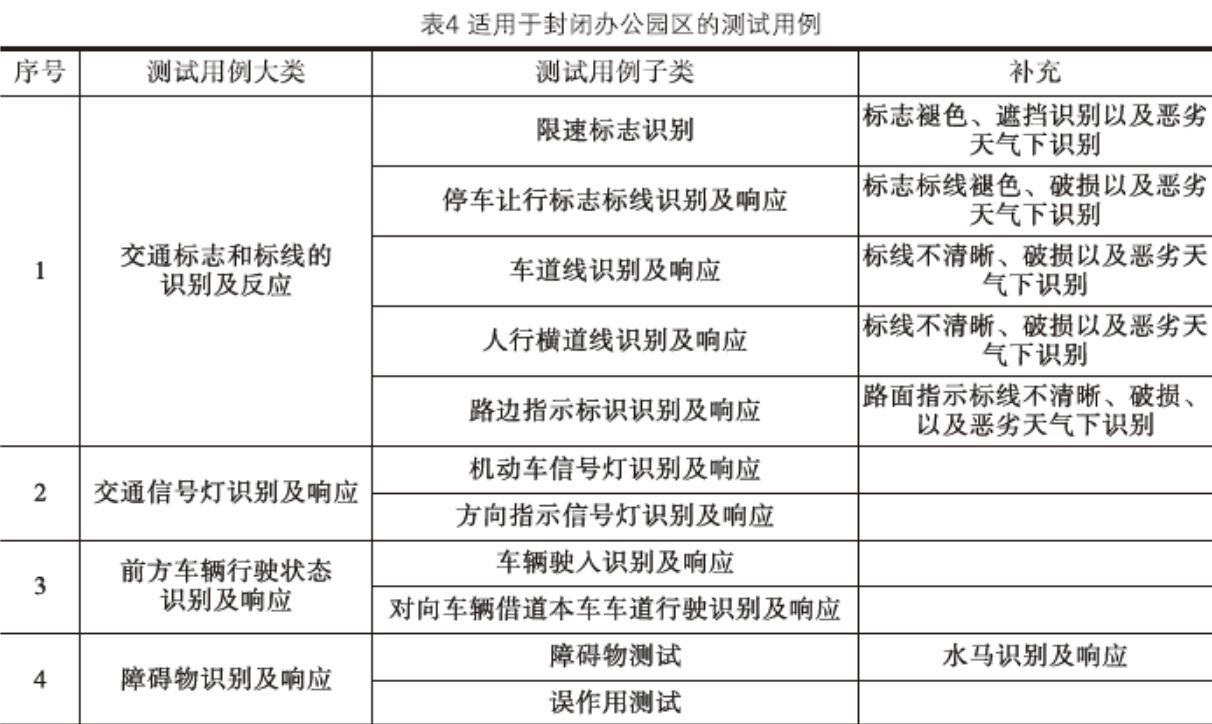
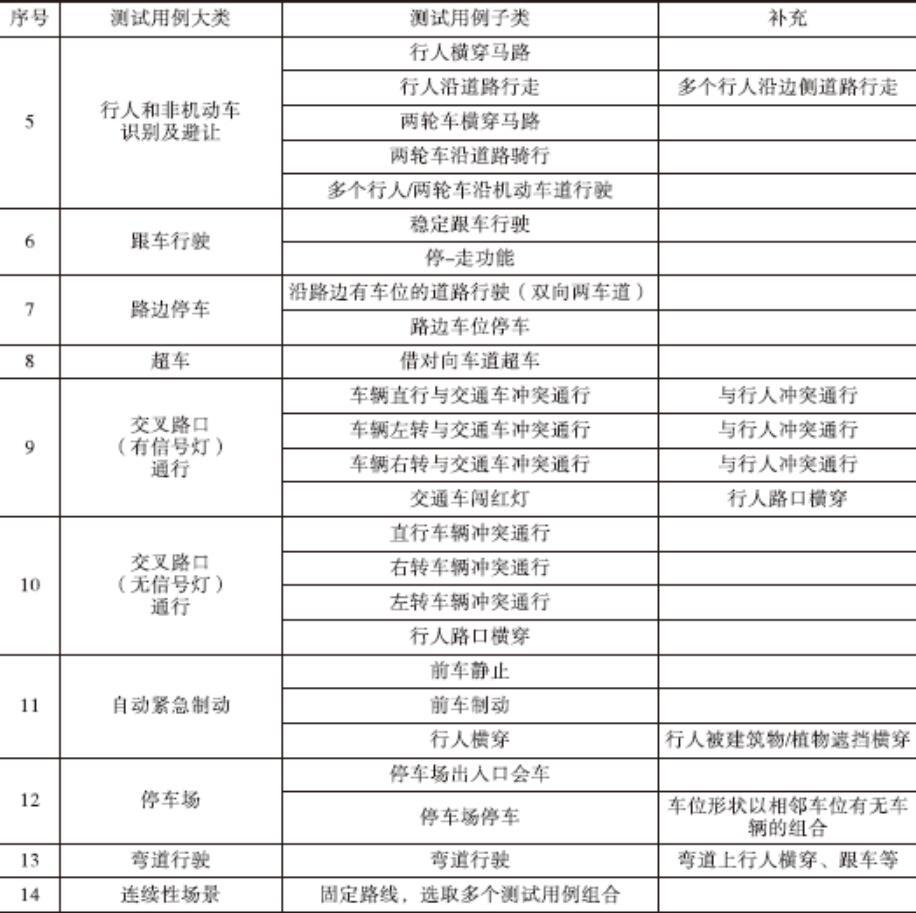
將以上整理出的封閉辦公園區道路特征和交通標識作為測試用例的靜態元素,車輛和行人的動作作為測試用例的動態元素。結合已梳理出的自動駕駛功能,整理出適用于封閉辦公園區的測試用例,如下表4所示。
5? ? 控制器驗證
為驗證上述測試用例,本文選用HIL的自動駕駛軟硬件平臺,并基于封閉辦公園區的道路場景,以控制器在環的方式進行控制器的功能驗證,測試自動駕駛控制器目標感知、目標響應、ODD范圍識別、遵守道路交通規則,軟硬件平臺如圖7所示。其中,HIL平臺集成了實時處理系統、程控電源、以太網交換機,運行仿真模型搭建工具MATLAB/Simulink、車輛動力軟件Vedyna、試驗管理軟件Veristand。自動化測試平臺運行自動化測試管理軟件TAE,實現測試序列的自動化執行。交通場景仿真軟件VTD運行虛擬交通場景,并根據真實傳感器的參數搭建虛擬傳感器模型,并將場景中的目標數據傳輸至待測控制器中,待測控制器進行決策后將加速、減速、轉向等控制器指令發送到車輛動力學Vedyna來控制車輛在交通仿真軟件VTD中的運動軌跡,從而實現對控制器在環測試。
本文以行人橫穿為例,仿真環境中,虛擬車輛以20km/h的勻速行駛,前方行人以設定的軌跡、速度進行橫穿。主要測試步驟如下:
首先,自動駕駛控制器的功能驗證需要場景作為支撐,根據上述章節梳理的封閉辦公園區場景,在交通環境仿真軟件VTD進行搭建,添加氣象條件、動態要素(如車輛、行人等)和觸發條件等,形成可用來測試的用例;
在交通仿真軟件VTD中搭建虛擬傳感器物理仿真模型,可根據真實傳感器的參數設定。通過設定傳感器的識別范圍,可作為虛擬毫米波雷達;通過設定虛擬傳感器的識別類型、畸變、FOV等可作為虛擬攝像頭傳感器;設置虛擬傳感器的探測距離可作為虛擬超聲波雷達傳感器;采用激光雷達點云注入方式實現對激光雷達的仿真;最后根據真實傳感器在實車上位置,在仿真環境中完成安裝和標定。
Vedyna是專門針對實時仿真測試和離線研究使用的快速車輛動力學軟件。根據控制器所在實車的整車參數,完成車輛動力學模型。如,通過設置迎風面積、環境車速、空氣密度等完成空氣阻力仿真;通過設置方向盤向角、轉向比進行轉向系統仿真等。
Veristand是HIL仿真測試系統的實時試驗管理管理,通過仿真模型加載、加載通信協議DBC、將實時仿真模型下發到實時仿真處理系統,完成對試驗的配置和監測。其試驗結果如下:
根據場景動畫及虛擬車輛的速度曲線圖可以看出,車輛在靠近行人時,會減速至0m/s,待行人安全通過后,再啟動并正常行駛。
6? ? 總結
傳統的基于里程和規則的測試方法需要向基于場景的測試驗證方法轉變。為提高自動駕駛汽車的開發驗證效率,本文分析封閉辦公園區的典型道路特征,并結合相關自動駕駛汽車測試標準,整理出應用于封閉辦公園區自動駕駛汽車的測試用例。試驗表明:該測試用例具有典型性、真實性,能夠較好滿足自動駕駛控制器仿真測試需求。
本文僅對單個測試用例(行人橫穿)進行測試,未考慮惡劣天氣狀況。后續將用更多的測試用例測試該控制器。對智能網聯汽車來說,最真實有效、最直接的測試車輛自動駕駛功能、性能的方法依舊是實車道路測試。雖已搭建典型的封閉辦公園區場景,但道路的測試場景較復雜,不能全部列舉出來,且真實道路測試不僅僅與單一交通車或行人進行交互,自動駕駛汽車應考慮多個測試用例組合起來,進行連續性場景測試。
參考文獻:
[1]王平,李秋霞,王志剛,李秋晨.園區自動駕駛車輛測試方案設計與應用[J].時代汽車,2020:4-6.
[2]解瀚光,朱紅儒,王陽,黃武陵.自動駕駛物流汽車技術及標準需求研究[J].中國汽車,2020:57-62.
[3]金楠.封閉園區自動駕駛橫向控制系統設計與實現[D].西南交通大學,2019.
[4]陳套,蔡博,回春.基于場景元素的智能網聯汽車場景構建研究[J].公路與汽運,2019,195:9-12.
[5]羅傳東.基于HIL臺架的LDW測試研究[J].汽車實用技術,2019,24:52-54.
[6]中國汽車標準委員會.《智能網聯汽車自動駕駛功能測試規程(試行)》[S].