雙機器人協同鼠標裝配末端夾具的設計
2021-11-03 11:57:16孟銀娜張云鵬王一明
設備管理與維修 2021年17期
關鍵詞:設計
孟銀娜,張云鵬,王一明
(河南機電職業學院,河南鄭州 451191)
0 引言
在機器人應用領域不斷擴大的環境下,多機器人在特定場合的協同作業越來越重要,根據任務要求,多機器人可以有序無誤地協同配合,以完成特定場合的工作需要。機器人末端夾具是根據作用對象的形狀特征來設計的,無論是夾持式還是吸附式夾具,設計時都需要滿足機器人作業所需要的重復精度,最大程度上使機器人末端執行器的結構簡單、緊湊、質量輕,以減輕手臂負荷。機械夾持式末端執行器多為雙指頭爪式,按手指的運動區分,可以分為平移型和回轉型;若按照機械夾持方式區分,可以分為外夾式和內撐式;若按照機械結構特性區分,可以分為電動(電磁)式、液壓式與氣動式,以及它們相互的組合。氣吸式機器人末端執行器,利用吸盤內的負壓吸住并移動工件,根據應用場合不同,末端執行器可以做成單吸盤、雙吸盤、多吸盤或特殊形狀的吸盤。經比較分析,本方案中工作站采用的是夾持式末端執行器。
1 機器人1 的末端夾具分析
機器人1 末端夾具的夾持對象是鼠標底座和鼠標USB 端口,根據鼠標底座和USB 的形狀特點,所設計的末端夾具手指需要有一定的開合范圍。考慮到鼠標裝配效率,為節省裝配時間,設計多功能夾具,一個夾具配備兩對手指,能夠分別加持鼠標底座和USB。設計前考慮以下方面:①末端夾具夾持的對象較薄,夾持力不應過大,為避免夾持力度過大,在末端夾具中添加傳感器感應夾持對象;②夾具承載變形要求,所設計的末端夾具承載不低于3 kg,應具備一定的剛度,夾持鼠標零部件時,最大變形量≤1 mm;③所設計的末端夾具應考慮鼠標底座和USB的形狀尺寸,根據所夾持對象的形狀特征設計夾具開合度;④根據鼠標底座以及鼠標USB 的形狀特征,采用雙指夾持相比三指夾持更加牢固。
綜合考慮以上四點設計機器人1 的末端夾具,根據夾持對象的形狀特征,設計出的夾具可以穩固夾持對象移動,不產生滑移,并且能夠在夾持鼠標底座和USB 端口時順利完成鼠標裝配工作。
2 機器人1 的末端夾具設計
因機器人1 末端夾具主要作用對象是鼠標底座和鼠標USB 端口,所以設計的夾具是根據鼠標底座和鼠標USB 設計的多功能末端夾具。機器人1 末端執行器主要由夾具底座、手指1 和手指2 三部分組成:手指1 的夾持對象是鼠標USB 端口,手指2 的夾持對象是鼠標底座。在設計夾具底座時需要考慮負載力,保證能夠完全承載兩對手指夾持對象時的重量,并且在不發生碰撞的情況下,夾持對象運動到裝配鼠標的動作位置(圖1)。
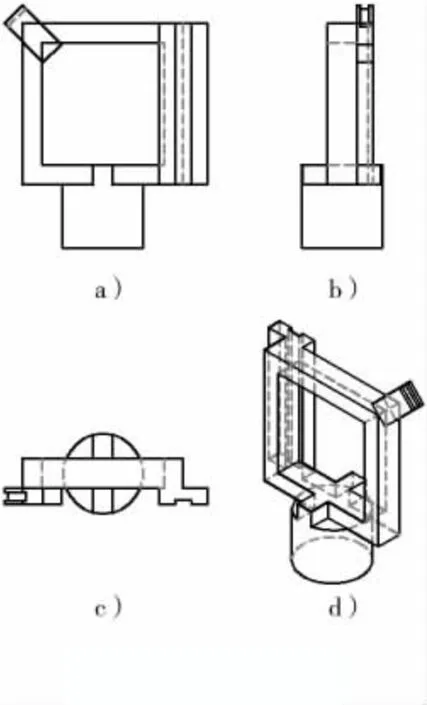
圖1 夾具1 底座
機器人1 手指1 的夾持對象為鼠標USB 端口,根據鼠標USB 的形狀尺寸,所設計的手指1 需要滿足至少13 mm 的開合度,夾持深度為3 mm(圖2)。鼠標USB體積小且質地比較薄,夾持力度不應過大,設計手指1時可以適當增強手指1 夾持面的粗糙度以增加夾持鼠標USB 時的摩檫力。
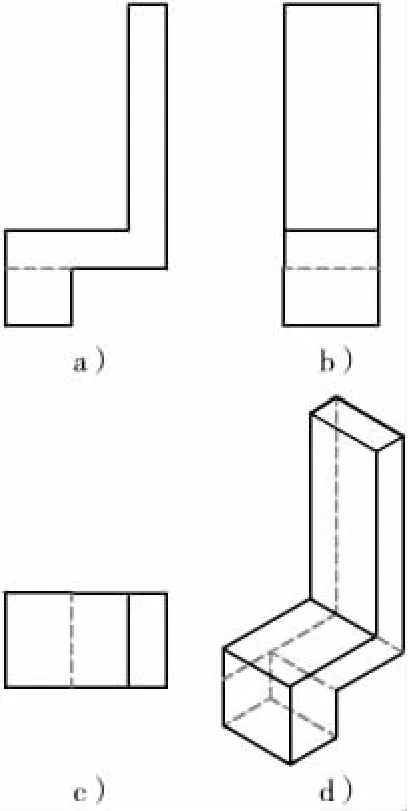
圖2 夾具1 手指1
機器人1 手指2 的夾持對象是鼠標底座,根據鼠標底座的形狀尺寸,手指2 需要至少96 mm 的開合度,夾持深度為3 mm(圖3)。考慮到鼠標底座較薄,夾持力度不應過大,可以通過增強夾持面的粗糙度來增大夾持鼠標底座時產生的摩擦力。
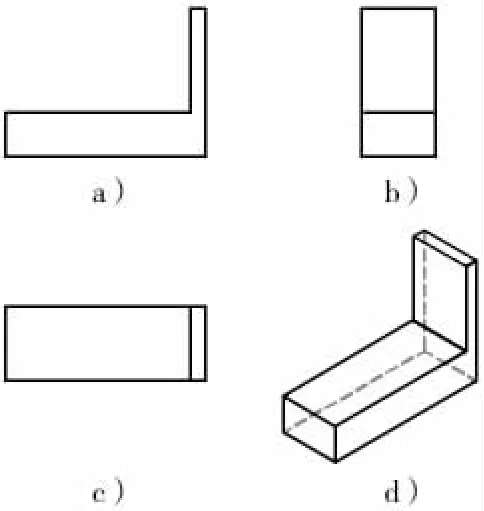
圖3 夾具1 手指2
3 機器人2 的末端夾具分析
機器人2 的作用對象是鼠標電池、鼠標上蓋和鼠標整體,為提高鼠標裝配效率、縮短裝配時間,根據鼠標上蓋和鼠標上蓋的形狀尺寸設計了一種多功能夾具,該夾具只設計了一種綜合性手指,通過設置其不同的開合度來完成鼠標電池、鼠標上蓋和鼠標整體的夾持和裝配。在設計之前應該考慮以下方面:①鼠標電池外表比較光滑,在設計夾具手指時應適當增強夾持面的粗糙度,并添加傳感器感應電池以便順利完成夾持作業;②夾具承載變形要求,所設計的夾具承載不低于2 kg,并且具備一定的剛度,在夾持鼠標電池、鼠標上蓋和鼠標整體時,最大變形量≤1 mm;③夾持鼠標上蓋時,考慮到上蓋比較薄,在增強夾持面的粗糙度、添加傳感器的基礎上要注意夾持力度不應過大,滿足夾持裝配所需就可以;④所設計的手指應具備一定的開合度,且開合度滿足對鼠標電池、鼠標上蓋和鼠標整體的夾持、裝配。
綜合考慮以上要求和鼠標電池、鼠標上蓋的形狀尺寸,為盡可能讓所設計的末端夾具結構簡單、緊湊,減輕手臂載荷,所設計的機器人2 的多功能末端夾具采用一指多用,通過兩個手指開合度的不同完成對鼠標上蓋、鼠標電池和鼠標整體的夾持、裝配。
4 機器人2 的末端夾具設計
機器人2 末端夾具作用對象是鼠標上蓋、鼠標整體和鼠標電池,根據鼠標電池以及鼠標上蓋的形狀尺寸設計了一種多功能夾具。機器人2末端夾具的設計主要包含夾具底座、夾具手指兩部分:手指可以設置不同的開合度來完成對鼠標電池、鼠標上蓋和鼠標整體的夾持、裝配。底座設計需考慮兩個手指和夾持對象的負載力,保證在夾持對象時可以完成一定角度的旋轉,保障裝配作業順利進行(圖4)。
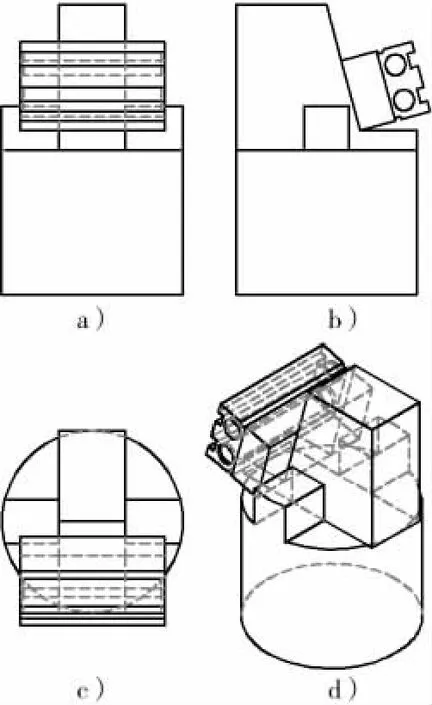
圖4 夾具2 底座
根據夾具2 手指不同夾持對象的形狀特征,設置不同的手指特征(圖5):①對于鼠標電池的夾持裝配,設置手指的開合度至少為12 mm,夾持深度為3 mm,夾持力度適中且夾持面具有一定的粗糙度并添加傳感器;②對于鼠標上蓋的夾持裝配,設置手指的開合度至少為50 mm,夾持深度為3 mm,夾持力度不應過大,同時增強夾持面的粗糙度并添加傳感器;③對于鼠標整體的夾持放置,設置手指的開合度至少為50 mm,夾持深度為4 mm,夾持力度適中。
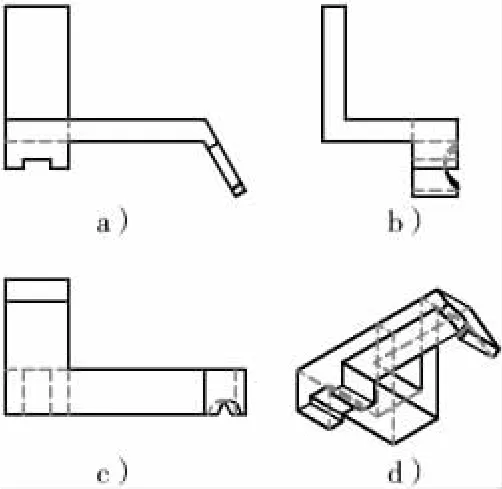
圖5 夾具2 手指
5 結束語
工業機器人廣泛應用在現代制造行業領域中,在RobotStudio 中離線/在線編程、模擬仿真,對輔助工作人員進行機器人工作站布局構建、模擬仿真示教、工作姿態設計優化具有重要作用。在RobotStudio 中對末端夾爪進行改進優化,以此獲得更高的裝配效率。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
