面向WSNs節點數據采集的無人機Voronoi圖路徑規劃
2021-11-02 02:59:12江媛媛黃登唐國民鄒炎華
科技信息·學術版 2021年20期
關鍵詞:規劃
江媛媛 黃登 唐國民 鄒炎華
摘要:長江中游航道自然條件復雜,灘多水淺、航道彎曲、水流湍急、流態紊亂、船舶流量大、船舶密度大,呈現出“淺、窄、彎、曲”四大特點,長江航道傳統的業務管理模式主要是依靠船艇,而船艇呈“帶狀”模式巡檢,視野窄、耗時長等短板日益凸顯。面對長江中游典型航道特征,近年來,隨著無人機(UnmannedAerialVehicle,UAV)技術的發展,因其靈活度高、機動性強、安全風險系數小、成本低等特點,被廣泛應用于搜索巡邏、偵察監視、搶險救災、物流配送、電力巡檢、農業灌溉等軍用或民用任務,無人機作為“會飛的照相機”,在航道巡航過程中視野可呈幾何數量級放大,既能將大面積區域內的航道、航標、整治建筑物的分布情況一覽無余,又可通過攝像頭變焦對某個點的細節進行放大查看。因此,無人機在對航道助航設施巡檢、航道水域環境保護、水尺水位觀讀等方面可充分發揮其高效迅速、機動性強、點面結合的突出優勢。與單架無人機相比,多無人機協同工作具有魯棒性好、容錯性高等獨優勢,不僅能夠完成單架無人機無法完成的復雜任務,而且在部分無人機出現故障時,只需重新規劃剩余無人機即可繼續執行任務,從而達到優化任務執行效果和提高系統可靠性的目的.路徑規劃是無人機執行任務的關鍵,也是自主無人機在工程應用上的主要挑戰,吸引了國內外學者的廣泛關注。基于此,本篇文章對面向WSNs節點數據采集的無人機Voronoi圖路徑規劃進行研究,以供參考。
關鍵詞:面向WSNs節點;無人機;Voronoi圖路徑規劃
引言
近些年,無人機因其可操作性、高機動性、靈活性以及經濟性等特點被廣泛應用于軍事和民用領域。例如,在民用領域,無人機用于執行救災救援、環境研究、天氣預報以及農業監控等任務;在軍事領域,無人機能夠在危險復雜區域飛行,并利用裝載的攝像機或其他偵察設備獲取多種形式的目標信息,有效降低了人力資源損耗,且能夠更高效地執行偵察任務。為了實現不同任務目標,需要對無人機進行合理的路徑規劃。路徑規劃問題通過規劃無人機的飛行路徑,使其可以在約束條件下完成指定的任務。
1WSNs
無線傳感網絡(WirelessSensorNetworks,WSNs)已在多個領域廣泛使用,如天氣監測、康復醫療、動物跟蹤。WSNs內多個傳感節點感測環境數據,再將數據傳輸至基站,進而實現對環境的監測。然而,由于受資源限制,如能量、安全,數據傳輸的可靠性仍存在挑戰。為了提高數據傳輸的可靠性,研究人員進行了大量的研究工作,并提出基于轉發節點的協作轉發方案。例如,分析轉發節點對數據傳輸的影響。此外,通常WSNs內的節點是由電池供電,屬于有限能量。一旦能量消耗殆盡,節點就無法感測、接收和傳輸數據,這就降低了數據傳輸的可靠性。能量采集是緩解WSNs能量短缺問題的有效技術。
2Voronoi圖
Voronoi圖是計算幾何領域中的一個重要內容,在空間查詢等相關研究領域中得到了較多關注。此外,Voronoi圖與Delaunay三角剖分互為對偶圖的關系已被廣泛地應用。Voronoi圖可以很好地表示空間數據的鄰近關系,同時具有矢量以及連續平鋪數據模型的基本特性,可以對空間數據進行很好地管理。
3多旋翼無人機技術特點
(1)機動性強。目前先進的多旋翼無人機可以達到140km/h的速度,百公里加速僅需2s,可以在7s之內上升到100m高空,進行空中作業不受地形限制,同時對起降條件的要求較低,只需要一個相對較小的平面例如石墩、車頂就可以作為起降平臺。根據操作員所處空間環境和磁場條件不同,可覆蓋半徑3~10km高度達500m的監測區域,并且在車船等移動平臺上,操作員作為中心還可以將此覆蓋面積無限延伸。(2)安全性高。多旋翼無人機可以在陰天、低霧等環境下升空作業,采集大量監測數據,尤其在水旱災害現場,操作人員可以選擇較為安全的區域對無人機進行操控,最大限度保障了人身安全,即使無人機故障,也可最大限度地避免人員傷亡,降低損失,具有較高的安全性。(3)采集數據多樣化。多旋翼無人機主要通過攜帶高清影像采集設備采集地面圖像,并且可以實時傳輸現場情況,有利于防汛抗旱減災的及時決策通過搭載一體式多光譜成像系統、熱成像傳感器、環掃毫米波雷達、RTK(Real—timekinematic,實時動態)模塊、探照燈、喊話器等不同功能模塊及設備可以實現不同應用場景的多樣化數據采集傳輸,能夠應對各種復雜困難局面。
4面向WSNs節點數據采集的無人機Voronoi圖路徑規劃
4.1傳輸能耗
4.2VDO-UAV算法
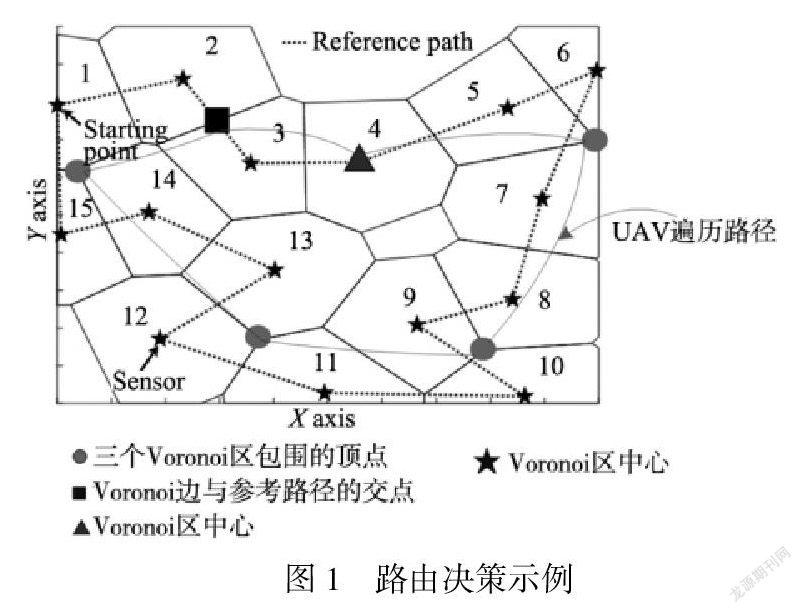
1)首先沿參考路徑,從始點對Voronoi區進行編號,如圖1所示,沿著參考路徑,對15個Voronoi區進行編號。(2)利用L(hmax),L(hmax-1),…,L(1)決策UAV盤旋的位置。具體而言,當h≥4時,所有區中心位置(h)∈L(h)都作為UAV盤旋的位置;當h≤3時,就尋找3個Voronoi區所包圍的Voronoi頂點,并將這些頂點作為UAV盤旋的位置,如圖1所示的紅色圓點。第5、6、7個Voronoi區包圍一個頂點,
如算法1的9~12行所示。(3)只剩余孤立的Voronoi區(h=1),在這種情況下,就將該孤立的Voronoi區的中心位置作為UAV盤旋位置,如圖1所示的Voronoi區4。如算法1的17行所示。
結束語
總而言之,針對WSNs的數據收集問題,提出基于Voronoi圖的無人機路徑規劃VDO-UAV算法。仿真結果表明,提出的VDO-UAV算法縮短了遍歷路徑。
參考文獻:
[1]王正才,彭紅.面向WSNs節點數據采集的無人機Voronoi圖路徑規劃[J].組合機床與自動化加工技術,2019(09):67-70+74.
[2]王欽禾,尹永鑫,戴麗,鄒宇翔.基于Voronoi圖和蟻群算法的無人機航跡規劃[J].導航定位與授時,2019,8(02):66-73.
[3]陳香敏,吳瑩.基于Voronoi圖的UAV攻擊多移動目標的路徑規劃算法研究[J].信息通信,2019(06):36-37.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
