雜亂蘆葦梳理機的設計與研究*
2021-11-02 08:20:48張洚宇馬曉曉周文靜
南方農機 2021年20期
張洚宇 ,周 鵬 ,馬曉曉 ,周文靜 ,葛 云
(1.新疆科技學院信息科學與工程學院,新疆 庫爾勒 841000;2.石河子大學機械電氣工程學院,新疆 石河子 832000)
0 引言
以蘆葦為原材料的蘆葦高立式沙障是防沙治沙的主要工程設施[1],主要作用是抑制沙丘的遷移。蘆葦具有取材方便、可再生、環境友好等特點,因其制作成本低廉和防沙性能優異,被廣泛用于新疆沙區道路的防沙工程。如建設中位于塔里木盆地南緣的和若鐵路防護帶,已通車的庫格鐵路部分路段的防護,采用的都是蘆葦高立式沙障。按沙障高度分類,可將蘆葦沙障分為低立式、中立式、高立式三種形式,其中以高立式沙障的使用最為廣泛[2]。目前,國內針對用于制作高立式沙障梳理的機械還處在研究階段,并未見其相關的公開報道。梳理分束設備也只是在草席編織、紡紗精梳等方面有應用,但這些梳理分束裝備所加工的材料有竹絲、蒲草、燈芯草、毛竹、苧麻、織布,與本項目研究的蘆葦有較大區別,且加工目的并不相同。國外的桿類作物梳理機構研究起步較早,如意大利Ferrari公司的Futura系列全自動梳理分束機、美國FMC全自動梳理分束機、英國的Pearson全自動梳理分束機等[3-5],主要通過單向滾齒式梳理、機械臂抓取及打結裝置,采用輸送帶將蘆葦傳送到機械臂抓取位置,然后機械臂抓取蘆葦到滾齒式梳理裝置進行梳理,最后將梳理好的蘆葦送到打捆器處打捆。但是,此類梳理機構都有著明顯的地域特色,主要都是結合當地作物種植模式所設計的,且其秸稈梳理的目的也不相同,不能直接借鑒使用。
目前,蘆葦高立式沙障的制作全部依賴人工,其制作過程十分煩瑣,人工高立式沙障作業如圖1所示,需要先由人工把散亂蘆葦捆扎成束,根據每束蘆葦的長度不同,捆扎蘆葦所用的鐵絲結也不同,為保證強度,一般兩個鐵絲結間隔250 mm左右;需要在施工路段打好固定立柱,立柱之間安裝平行鐵絲,兩平行鐵絲之間間距250 mm左右,用于綁扎蘆葦束;最后將捆扎完成的蘆葦束搬運到施工路段,按照設計的間距由人工一束束地綁扎安裝,最后形成蘆葦高立式沙障。根據不同路段的實際需求,其設計高度為800 mm~2 000 mm,蘆葦采用質地優良的水生干蘆葦,用鍍鋅鐵絲捆扎成直徑為30 mm~50 mm的蘆葦束,蘆葦束間距為30 mm~50 mm,每隔S=3 000 mm設置固定立柱,一般木立柱直徑不少于1 500 mm,根部埋入地基中不少于1 000 mm。

圖1 高立式沙障作業施工現場
項目小組所研制的機械裝置可以解決蘆葦高立式沙障捆扎前一步工序蘆葦雜亂、浪費工時的問題,使雜亂的蘆葦在梳理之后能以30 mm~50 mm為單位分離開來,提升蘆葦高立式沙障的捆扎效率。
1 整機結構及工作原理
1)設計要求:雜亂蘆葦梳理機主要由執行機械臂、末端梳理執行器、機架、喂料口、傳送帶、限量板等組成,雜亂蘆葦梳理機的結構簡圖如圖2所示。作業時,將散亂的蘆葦放入喂料口,在限量板和摩擦傳送帶的共同作用下,蘆葦被平攤到蘆葦傳送帶上,傳送帶的一端可以把蘆葦一端固定,蘆葦梳理機的機械臂帶動末端梳理執行器從蘆葦固定的一端進行運動,末端梳理執行器沿蘆葦軸向進行直線運動,在末端梳理執行器梳齒的作用下,互相纏繞的蘆葦分離開來,達到梳理的目的。
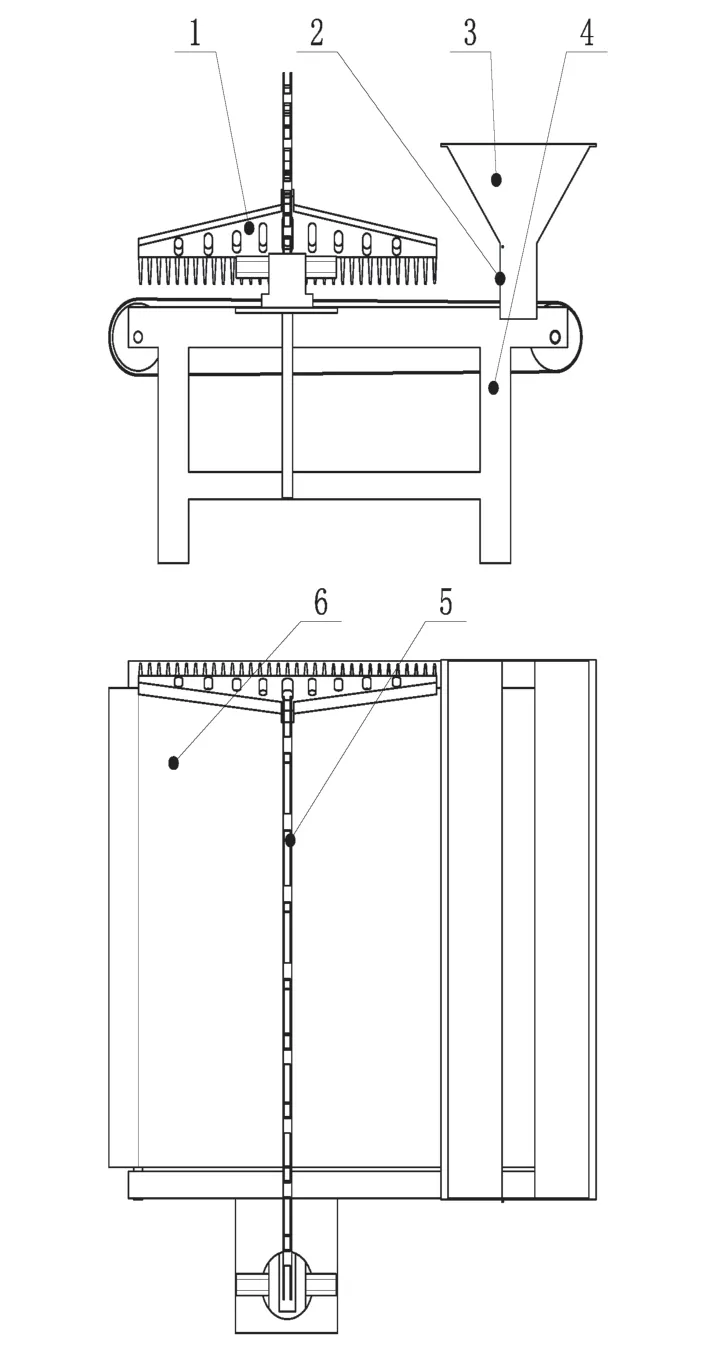
圖2 雜亂蘆葦梳理機的結構簡圖
2)選用伺服電機作為裝置的動力,傳送帶每次運行的距離是固定的,距離等于梳齒的總寬度。末端梳理執行器安裝在機械臂上,機械臂的驅動電機為兩臺伺服電機,分別控制機械臂的主臂和小臂,實現末端梳理執行器的直線運動。設定機械臂的運動為循環運動,起始點為距離機械臂底座的遠端,整機的運動精度要求較高,故采用伺服電機為機構的動力源以提供精確的定位。
2 關鍵部件的選取與設計
2.1 喂料口的設計
喂料口設計如圖3所示(圖中2是限量板),喂料口整體呈漏斗形狀,采用上寬下窄的設計,有助于物料添入。喂料口出口安裝在傳送帶的上方,在傳送帶的作用下,蘆葦從料箱里不斷落到傳送帶上并被帶出料箱。料箱出口的設計能直接影響蘆葦的攤鋪效果,為了提高攤鋪效果,在喂料口的出口設計了柔性擋板,能控制蘆葦的流出量,從而控制蘆葦在傳送帶上的厚度,同時還能避免蘆葦在出口堆積卡死的現象。
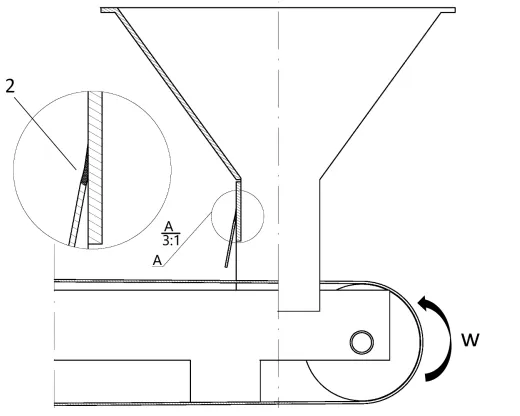
圖3 喂料口的設計簡圖
2.2 末端梳理執行器的設計
本裝置是制作蘆葦高立式沙障之前的蘆葦處理步驟,目標是為蘆葦高立式沙障提供易用的蘆葦束,將蘆葦梳理成捆,其直徑在30 mm~50 mm即可。末端梳理執行器是本設備的核心部件之一,直接與蘆葦物料進行接觸,末端梳理執行器的梳齒由上至下從攤鋪好的蘆葦縫隙穿過,然后再沿徑向運動,從蘆葦的一端運行到另一端,完成蘆葦的梳理。末端梳理執行器示意圖如圖4所示。
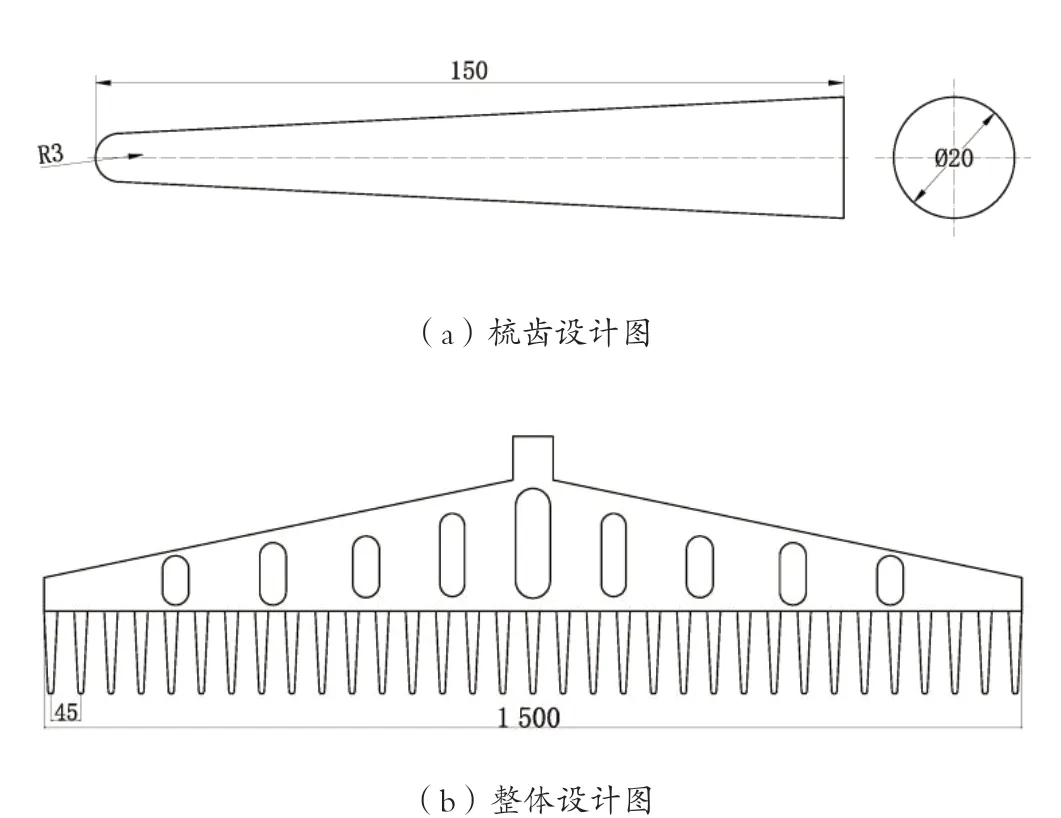
圖4 末端梳理執行器示意圖
依據蘆葦的莖稈直徑分布在4 mm~10 mm之間,既要保證梳齒尖端能順利插入蘆葦縫隙,又要避免梳齒損壞蘆葦。梳齒呈錐形,長度為150 mm,根部直徑D=20 mm,尖端為球面設計,取梳齒尖端部分球半徑為R=3 mm。
2.3 梳理機械臂的運動學分析
工作時,末端梳理執行器的運動軌跡是由兩部件的運動復合而成的,一是機械臂主臂繞主支點A的旋轉運動,二是機械臂小臂繞主臂連接P12點作旋轉運動。末端梳理執行器的運動軌跡有一段直線的循環運動,末端梳理執行器B從初始位置e開始運動,沿曲線edf到達最遠點f,梳理執行器沿點f開始回向運動,并將末端梳理執行器的梳齒插入散亂的蘆葦中,從點f至點e,末端梳理執行器沿接近直線的軌跡進行蘆葦的梳理。在此運動過程中,梳齒的軌跡一直保持豎直狀態,此時,機械臂完成一次梳理作業,末端梳理執行器的梳理動作按此過程循環。
機械臂主要由支架、主臂、小臂、末端梳理執行器組成。梳理機械臂的運動可簡化為曲柄滑塊機構的形式[6],由兩套動力電機分別驅動主臂和小臂,末端梳理執行器在小臂的帶動下運動,實現雜亂蘆葦的梳理工作。在此曲柄滑塊機構中,采用解析法對整體裝置進行運動學分析,末端梳理執行器的運動軌跡簡圖如圖5所示。
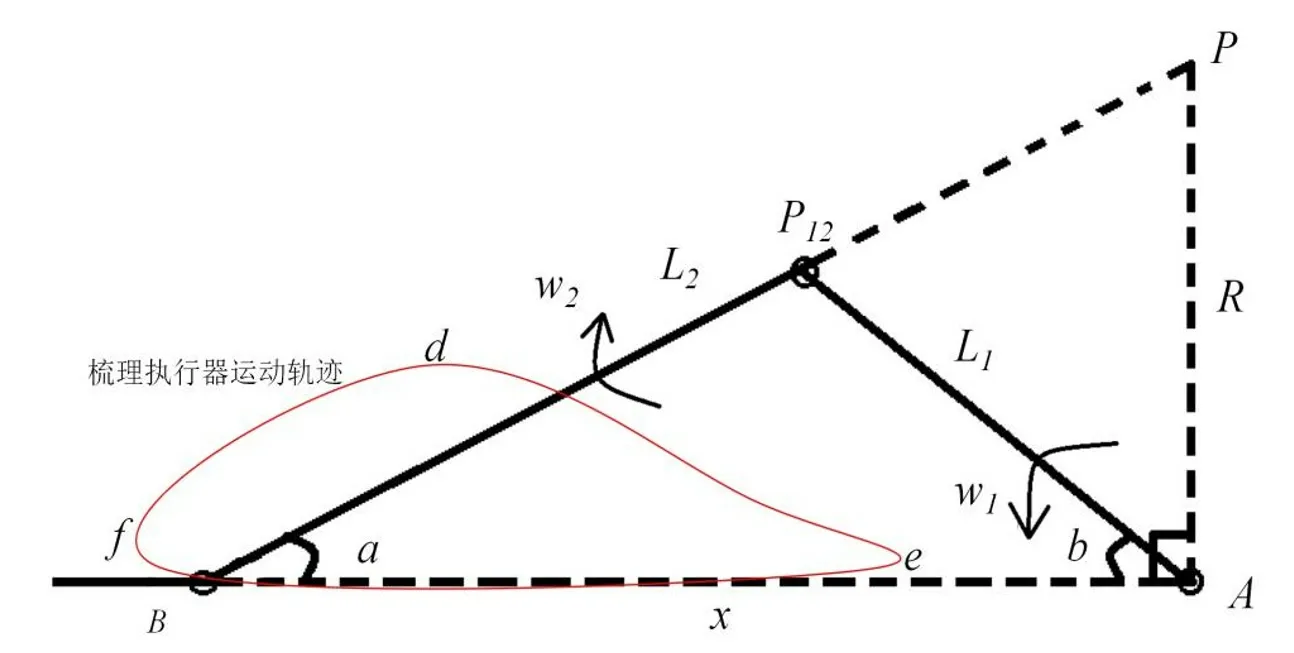
圖5 末端梳理執行器的運動軌跡簡圖
由圖5可知:
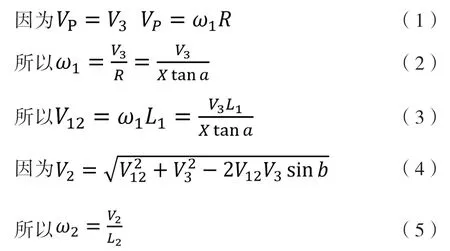
由式(1)、式(2)、式(3)、式(4)、式(5)得:
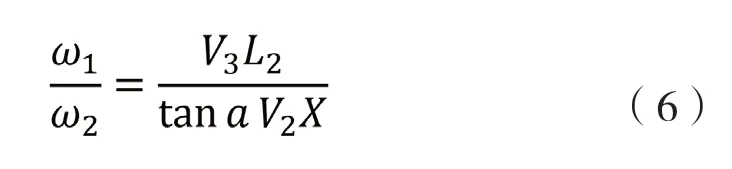
式中:L1——主臂;L2——小臂;ω1——主臂的角速度;ω2——小臂的角速度。
由上述計算分析可知,兩驅動電機的轉動角速度滿足公式(6)即可實現末端梳理執行器的直線梳理段的運動關系,實現雜亂蘆葦的梳理。在實際工作中,因蘆葦物料含水量、枝葉量等影響導致梳齒與蘆葦之間的實際阻力不同,造成實際梳理過程的運行速度不能直接確定,需要根據不同的使用工況,合理選擇梳理速度ω2。
3 控制系統的構建
控制系統的構成:根據雜亂蘆葦梳理機的功能設計要求,選擇了結構靈活、傳輸快、帶寬穩、易于開發維護的三菱FX2N-32MR-001型號的PLC作為主控制單元,匹配可靠性高、精度高的ASD-B2型伺服電機驅動器作為機械臂梳理裝置的控制器,伺服電機選用A2-0221-L為驅動電機,功率200 W,組成控制模塊。控制系統主要由電源、三菱FX2N-32MR-001型號的PLC、ASD-B2型伺服電機驅動器、A2-0221-L-A200伺服電機(機械臂兩個電機,傳送帶動力電機)、啟動按鈕以及急停按鈕等組成。
以PLC為核心控制器構建控制系統,硬件電路接線圖如圖6所示。分析裝置梳理過程僅用到伺服電機為執行元件:PLC控制三臺伺服電機,兩臺控制機械臂驅動末端梳理執行器對蘆葦進行梳理作業,另一臺驅動傳送帶的運轉,傳送帶每運行一個末端梳理執行器寬度d就會停止,等待梳理完畢就進入下一個梳理循環。

圖6 硬件電路接線圖
控制系統的硬件電路由PLC、伺服電機、伺服驅動器、開關電源等組成。PLC通過向伺服驅動器發送脈沖控制伺服電機轉動,驅動整個蘆葦梳理機構[7],末端梳理執行器與小臂剛性連接,兩臺伺服電機分別控制機械臂的主臂和小臂,在兩臺伺服電機的協作下,末端梳理執行器的末端軌跡按照設計好的軌跡運行,完成雜亂蘆葦的梳理。在末端梳理執行器完成一次梳理后,傳送帶電機會運行一個末端梳理執行器寬度的距離,將料箱里面的蘆葦再平鋪到傳送帶上,為下一次梳理做好準備。
4 試驗
裝置系統調試完成后,先空載運行10 min,中間記錄測量傳送帶的距離、機械臂的跨度是否滿足要求,確定合格后再進行試驗。
試驗:選用博斯騰湖的冬收蘆葦為試驗對象,蘆葦送入到喂料箱內,啟動設備。結果表明:項目小組設計的雜亂蘆葦梳理機構能夠實現對蘆葦的梳理,且能使梳理后的蘆葦以45 mm的間距分開,達到了設計要求,滿足蘆葦高立式沙障的下一步捆扎要求。
5 結論
項目小組完成了雜亂蘆葦梳理機構的設計,得到了設計的結構參數和部分運動學參數,實現了雜亂蘆葦的梳理工序,為進一步優化設計提供了基礎樣機與數據。試驗發現,在梳理過程中,蘆葦會出現軸向堆積,分析原因為蘆葦枝葉較多,導致末端梳理執行器梳理不夠順暢,還有繼續優化的空間。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09