基于PLC控制的組合式飛機蒙皮吊裝系統設計
2021-10-30 19:08:33程露
科學與生活 2021年19期
程露


摘要:本文設計了基于PLC控制的組合式飛機蒙皮吊裝系統,系統采用主從控制,蓄電池供電,快插模塊的方式實現兩種吊裝方式的快速切換,利用吸盤真空吸附的方式實現蒙皮的柔性吊裝,主要介紹了吊裝系統的基本原理和系統方案,具體分析了吊裝系統的硬件組成、軟件調試及實驗驗證。
關鍵詞:PLC控制;組合式;真空吸附;柔性吊裝
前言
蒙皮是飛機的重要組成部分,屬于飛機外形零件,直接形成了飛機的氣動外形,飛機蒙皮使用最廣泛的是鋁合金和部分復合材料[1]。為了滿足各種曲率不同尺寸蒙皮零件的運輸,提高吊裝設備設計合理性和適用性,就必須設計研發新的吊裝設備[2]。而柔軟并且有彈性的吸盤可以很方便地實現諸如蒙皮零件的吸持、脫開等裝夾功能,吸盤組布置主要形式包括環形、矩形、三角形和直線[3]。
針對生產需要,本文設計了一套基于PLC控制的組合式飛機蒙皮吊裝系統,可適用于兩種形狀蒙皮的吊裝(長條形和方正形)。
1總體設計方案
本文設計了一種電控的組合式飛機蒙皮吊裝系統,本設計的總體結構簡圖如圖1所示,該系統可分兩種工作方式,如圖1左側可吊裝長條狀蒙皮,右側安裝方式可吊裝方正形蒙皮。區別于傳統飛機蒙皮吊裝方式,本系統采用真空吸盤吸附方式,實現蒙皮的柔性吊裝。蓄電池供電,主從控制,快插模塊的方式實現兩種吊裝方式的快速切換。
2電控系統硬件組成
組合式飛機蒙皮吊裝電控系統硬件由蓄電池組、UPS電源和管理器、S7-1200CPU、I/O模塊、ET200SP分布式I/O和遙控模塊等組成,這些電控元件安裝在電控箱中。
2.1電池系統
本設計電池系統采用雙電源模塊,主電源模塊系統主要包括蓄電池組、充電器、顯示屏和氣溶膠滅火器等,充電器220V輸入24V輸出充電,蓄電池組由單體電芯為3.2V/230AH中航鋰電電芯組合而成,總容量為25.6V/230AH,顯示屏支持CAN通訊,其電池電量及報警信號能反饋到控制系統,氣溶膠滅火器可實現電池應急保護功能。備用電源模塊系統采用菲尼克斯UPS電源加管理器構建,主電源模塊故障時,備用電源模塊系統無間斷供電。
2.2反饋系統
蒙皮吊裝過程中需實時反饋電池剩余電量、電池是否故障和吸盤內部真空度等,用于確定可連續工作的時長、起吊與放下的時機和是否啟動應急措施等。本系統設計了一套實時反饋系統,包括反饋電池剩余電量、電池是否故障、吸盤內部真空度和吸盤吸附壓力值等,吸盤內部真空度和吸盤吸附壓力值信號通過西門子模擬輸入模塊實現信號采集,電池剩余電量、電池是否故障通過西門子S7-1200控制器實現信號采集,S7-1200控制器分析和處理采集的反饋信號,把反饋信號以適當醒目的形式顯示于顯示屏上。
2.3遙控模塊
在吊裝蒙皮過程中,蒙皮處于空中時,為防止工人誤操作按到釋放鍵造成蒙皮摔落,本系統采用雙遙控模式。遙控器選擇阿波羅的四點位遙控器,遙控器1配置泵開、吸附和釋放鍵,遙控器2配置使能鍵;整個吊裝過程中,只有在吊裝完成后才能使用遙控器2,系統采用互鎖的方式,實現必須同時按下兩個遙控器的使能和釋放鍵吸盤釋放的功能,達到防止蒙皮處于空中時工人誤操作造成蒙皮摔落的目的。
3軟件調試
3.1通訊參數設定
電控系統共有2臺真空泵、1組電源模塊和兩個壓力傳感器,主電池模塊和PLC可編程控制器之間通過CANOPEN總線進行數據傳輸,壓力傳感器通過AI模塊進行數據反饋,真空泵通過與CPU自帶的數字輸入輸出I/O點位進行啟停控制,通過AO模塊進行開度控制。主要參數設置如表1所示:
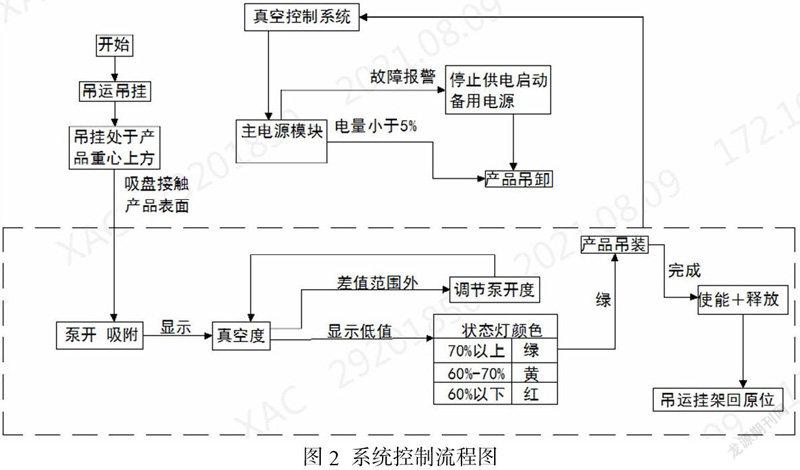
3.2控制流程
如下圖2所示,首先將吊掛從小車上吊運至產品上方產品重心位置;然后放下至吸盤接觸被吊產品表面,啟動真空系統,按下遙控器1的泵開鍵和吸附鍵,使吸盤與產品表面完全吸附,觸摸屏上顯示泵1系統和泵2系統的真空度值,當真空度在85%以上狀態燈處于綠色時吊裝產品;產品起吊脫離所停放工裝時,將收緊帶由產品下方穿過,一端掛在三角環上另一端穿進收緊帶,收緊收緊帶至接觸產品;最后緩慢平穩起吊產品至盒段裝配型架,產品在安裝位置上方0.2m左右是拆除收緊帶,繼續將產品放置到位(整個吊運過程保證真空系統全程吸附);當產品完全放置安裝好后,同時按下遙控器2使能和遙控器1釋放按鈕關閉真空系統釋放產品,吊掛吊回原位。
4結束語
設計的基于PLC控制的組合式飛機蒙皮吊裝系統,能一次性滿負荷工作至少3個小時,實現某型機復材外翼全尺寸盒段上壁板蒙皮(一架機共三塊)的逐塊吊裝。應用結果表明:蓄電池供電、主從控制、快插模塊的方式便于存放和快速安裝切換模式,吊裝過程操作簡單,對工人要求低,性能穩定,滿足吊裝要求。該系統還可發展為更多子站的模式,理論上可實現對各種形狀尺寸蒙皮的柔性吊裝。
參考文獻
[1]鮑巖,董志剛,朱祥龍.蒙皮鏡像銑削支撐技術的研究現狀和發展趨勢.航空學報2017(12)
[2]高鑫.飛機大蒙皮吊裝技術研究.碩士學位論文,南昌航空大學,2018
[3]劉紅.飛機蒙皮檢測機器人運動控制研究.碩士學位論文,南京航空航天大學,2012
