基于TC264的智能小車控制系統
2021-10-29 08:28:22王加安戴鵬蔣波文
電子制作 2021年18期
王加安,戴鵬,蔣波文
(常州工學院,江蘇常州,21300)
0 引言
在智能化飛速發展下,智能小車應用廣泛,能包括自動駕駛汽車,盲人出行導航車,自動化物品運載車,電力運行故障檢查車,車間內的自動運輸車,除此之外在軍事領域智能小車也有著廣泛地應用,如作為練習訓練時的移動標靶,自動排雷車,彈藥輸送車等。基于攝像頭的智能小車系統充分利用了攝像頭傳感器替代人眼采集的信息完整,檢測范圍寬,并且成本低的優點。攝像頭采集到的道路圖像包含了行駛路線的邊緣以及路徑走向趨勢等信息,能夠通過單片機核心進行預處理。因此,這種獲取道路信息并處理的方法使得智能小車自動行駛的效果更加顯著。智能駕駛小車運用圖像處理技術在未來小車實現智能化的過程中十分重要。小車獲取道路信息是能夠實現各種復雜操作的先決條件。智能小車的自動駕駛技術采用了自動控制原理、電子技術、圖像處理技術、傳感器技術等多種技術融合的方式[1]。
1 系統整體設計
智能小車控制系統選用Infineon SAK-TC264DA-40F200W作為控制器,以MT9V034[8]神眼攝像頭作為智能小車的道路信息采集模塊,將信息數據傳送給主控芯片,采用圖像二值化處理[9]后將圖片轉換為計算機可識別的黑白圖片[10]并在黑白圖片劃取中心線作為小車行駛的道路標志的路徑線,同時將處理后的路徑圖像信息數據實時顯示在OLED[11]屏幕上,通過增量式PID[2]算法控制小車速度調節,位置式PID 算法控制小車轉向,確保小車準確行駛[12-14]。小車系統整體結構圖如圖1 所示。

圖1 系統整體結構圖
2 硬件電路設計
■2.1 電源電路設計
采用7.2V的鎳鎘動力電池作為小車的供電源,驅動電機工作的電壓是12V,主控芯片電路、攝像頭圖像傳感器電路及顯示模塊電路的工作電壓是+3.3V,由于各模塊的工作電壓不同,因此選用MC34063 升壓芯片和LM2596 降壓芯片,調節整體電路的不同電壓值,以此實現對系統的整體供電。其電路原理如圖2 所示。
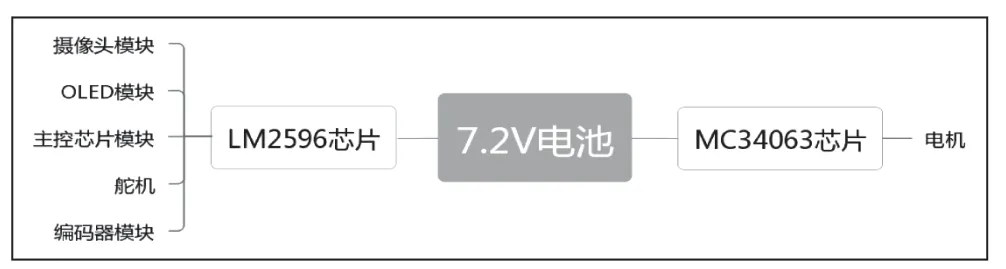
圖2 供電原理圖
■2.2 驅動電路設計
采用MC34063 芯片來獲得12V 電壓,為MOS 管的穩定飽和提供高壓。其電路原路圖如圖3 所示。

圖3 驅動電路設計圖
直流電機的驅動采用IR2104 芯片的高電壓、高轉速動力的性能特點提供了12V 電壓的全橋雙路驅動電路,此電路大大提高了電動機的工作轉矩和轉速,其電路原理圖如圖4 所示。

圖4 雙路式驅動原理圖
■2.3 圖像采集模塊設計
該系統采用MT9V034 神眼攝像頭,具有自動曝光功能,可自由設置對比度、曝光時間、幀率、分辨率、增益等;在光線暗、日光等極端環境下也可以發揮該攝像頭的功能。
■2.4 OLED 顯示模塊
我們選用OLED 顯示屏,具有對比度高、視角廣、反應速度快,通過I2C 總線的0.96 寸OLED 屏幕顯示二值化處理過的道路信息。
■2.5 編碼器模塊
我們選用mini512 線增量式測速編碼器[15],對電機的速度進行實時測量,把電機的角位移轉換成周期性的電信號,更加便捷的實現了主控芯片對電機的控制。
■2.6 陀螺儀、蜂鳴器模塊
我們給系統設置了九軸陀螺儀傳感器可以讓物體在運動過程中感知其水平、垂直、俯仰、航向和角速度等信息。利用該傳感器的特性,我們可以在物體三維運動中提煉出相關的角度和角速度,當任意傳感軸上發生超出閾值的事件時,便會生成一個中斷,同時給蜂鳴器報警裝置,進行警告。
3 系統軟件流程設計
系統采用C 語言[16]編寫,主程序首先進行初始化,通過初始化后的攝像頭傳感器采集道路信息,對圖像進行大津法二值化處理,然后對圖像進行去噪處理[17],對處理完的圖像劃取中線,以獲取準確的道路信息。通過分析采集的圖像數據,對小車的轉向以及速度進行控制,再由增量式PID 控制算法驅動電機運轉,位置式PID 控制算法驅動舵機調整小車運行狀態,從而達到自動行駛的功能。程序總體流程圖如圖5 所示。

圖5 系統工作流程圖
■3.1 速度控制處理
為了達到更好的速度控制效果,我們選用閉環控制的方式,通過閉環反饋使系統的精度提高,系統的響應時間縮短,穩定性提高。我們采用了增量式PID 作為速度閉環處理控制的算法。增量式PID 由于計算機輸出增量,所以誤動作的影響小,沖擊小。該算法不需要累加,控制增量su(k)的確定僅與最近k 次的采樣值有關,所以較容易通過加權處理而獲得比較好的控制效果。
增量式PID 如式1 所示:

■3.2 圖像處理
數字攝像頭可直接采集賽道灰度值,其中灰度值高的為白色,灰度低的為黑色,因此在圖像中的白色和黑色的灰度值會有較大區別,通過大津法分割閾值,從中分離出目標物體,在根據設定的閾值圖像中部向兩邊搜選黑白跳變點,從而確定左右邊界位置,并根據左右兩邊界計算出中心作為中心點,推算完整幅圖像的中心點后,將中心點進行處理,使其具有連續性。彎道的圖像處理如圖6 所示。

圖6 彎道圖像處理效果圖
4 總結
該系統設計的基于TC264的智能小車,通過攝像頭采集道路信息,增量式編碼器檢測當前的速度,將數據傳送給核心控制器,分析智能小車當前行駛狀態,實時控制。該系統采用模塊化的設計,經過實際測試表明,智能小車能夠實現自動駕駛功能,能夠通過設定的彎道、直道、環島等道路,本設計實現了一個具備速度控制、道路信息采集分析、自動駕駛功能的智能小車。
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
